Moin Forum, ich bin auf der Suche nach folgenden Aufbau. Gleitschiene bis 10 m länge. Am besten in 1 m Stücke teilbar für transport. Auf der Gleitschiene ein kleiner Schlitten. Da sollte ungefähr eine Zigarettenschachtel drauf passen. Der Schlitten soll elektrisch vor und zurück bewegt werden können. Und ich brauche eine Positionserkennung wo man sich auf der Schiene gerade befindet. Am liebsten wäre es mir, wenn der Antrieb nicht auf dem Schlitten sitzt, damit nicht auch noch 10 Meter Kabel verfahren werden müssen. Kennt jemand von euch einen Anbieter, bei dem man wegen sowas mal anfragen könnte? Gruß Chris
:
Verschoben durch Moderator
Was solls geben? Eine Kameraführung? Dann schau dir an wie es für Übertragungen von Sportereignissen in Stadien gemacht wird. Chris schrieb: > Am liebsten wäre es mir, wenn der Antrieb nicht auf dem Schlitten sitzt Also auf der zerlegbaren Schiene?
Keine Kamera, sondern eine Testplatine die definiert auf ihre Basisstation zugefahren werden muss. Da das ganze Funkt möchte ich auf dem Schlitten nur die zu testende Platine haben und möglichst wenig frende Elektronik oder Kabel. Antrieb könnte man vielleicht über Seilzüge lösen. Die lassen sich dann zum Transport aushängen und aufwickeln.
Modelleinsenbahn hatte ich ehrlich gesagt auch schon überlegt. Aber da wäre noch das Problem der Positionsrückmeldung und es sitzt halt Elektronik in der Lock und Strom fließt durch die Schienen. Beides nicht ideal. Im Grunde bräuchte ich sowas wie den Aufbau von einem 3D Drucker nur in sehr lang. Dann könnte der Motor an einem Ende sitzen, weit weg von der Basisstation und irgendwie weiß der 3D Drucker ja auch genau wo er ist.
Chris schrieb: > Antrieb könnte man vielleicht über Seilzüge lösen Eben, so wie es "fliegende" Kameras in Stadien machen. Position über Referenzposition und incrementelle Geber im Antriebsrad. Oder dann reines Zählen bei Antrieb über Stepper.
Chris schrieb: > Im Grunde bräuchte ich sowas wie den Aufbau von einem 3D Drucker nur in > sehr lang. Dann könnte der Motor an einem Ende sitzen Skalenseil. Ziehen kann das ein Mattel HiotWheels Auto in einer Plastikrinnenfahrbahn. Das Seil läuft um eine Umlenkrolle und den Motor im kreis und wird mit einer Feder auf dem Wagen gespannt. Die Position erfährt man über die Motorumdrehungen, z.B. Schrittmotor.
Ein Zahnriemen wäre als Antrieb noch eine Möglichkeit, um den Antrieb stationär zu halten. Die Positionsmessung muss man dann trotzdem noch lösen. Reicht es da wirklich, die Position pro Segment zu bestimmen? Dann kannst du ggf. einfach ein paar überfahrbare Schalter und einen breiten Nocken am Wagen einsetzen. Mit freundlichen Grüßen Thorsten Ostermann
Am liebsten wäre mir eine fertige Lösung, die ich irgendwo einkaufen kann. Ich weiß, Igus baut Gleitschienen. Mehr aber auch nicht.
Beckhoff XPlanar. Vermutlich einen Ticken zu teuer, sieht aber sehr cool aus :) ab 06:30 in dem Video auf https://www.beckhoff.com/de-de/produkte/motion/xplanar-planarmotorantriebssystem/
Nope, Leistungselektronik in den Schienen kommt auch nicht in Frage.
Wenn die Modellbahn taugt, warum denn nicht. Positionserfassung hast du, solange es gradeaus dahingeht doch eh integriert. Die Schwellen stellen doch sowas wie nen allerdings sehr groben Encoder dar. Einfach unten ne Reflexlichtschranke hin und dann nur mehr rauf runter zählen. Wenn das nicht reicht, dann nen schwarz-weissen Papierstreifen draufgepappt. Es wär auch möglich eine Zahnstange zu verwenden in die ein Zahnrad an dem ein Encoder hängt eingreift. Da musst du aber beachten, dass die Länge der Segmente immer gleich lang, abgestimmt auf die Teilung ausfällt. Oder halt das bereits erwähnte Seil. Vielleicht ne Angelschnur, die ist bei kleinem Durchmesser hochbelastbar. Dazu auch noch spottbillig und immer in ausreichender Länge als Ersatz mitnehmbar.
:
Bearbeitet durch User
Weil möglichst keine zusätzliche Elektronik in der nähe vom DUT sein soll
Versuch es mal mit Energieketten: https://www.hukag.com/produkte/energieketten/ Die sind aneinanderreihbar und teilbar. Eine große als Führung und die kleine als Umlaufkette, die über ein Umlaufzahnrad positioniert wird.
Da die Genauigkeit eher egal ist +-5mm?, wurde ich einen Zahnriemen nehmen. Dazwischen eine Item Schiene und die Nut gleich als Führung verwenden. Vorne und hinten eine Umlenkrolle und eine davon mit einem Schrittmotor + Getriebe + Geber antreiben. Den Riemen entweder über verstellen der Umlenkrolle oder am Schlitten spannen. Positionieren würde ich nur über Geber + Referenzschalter. Willst du etwas mehr über die Anwendung sagen? - wie oft muss gemessen werden, wie schnell und genau positioniert, welche mechanischen Möglichkeiten hast du? https://product.item24.de/produkte/produktkatalog/produktdetails/products/zahnriemenumlenkung-1001586078/zahnriemenumlenkung-8-80-r25-vk32-36611/ https://product.item24.de/produkte/produktkatalog/produktdetails/products/zahnriemen-1001586086/zahnriemen-r25-t10-schwarz-33710/
Um nochmal auf die Eisenbahn zurückzukommen. Märklin Mittelleiter, Soweit ich mich dran erinnere gabs da welche wo lauter kleine Pinöppel mittig rausstanden. Eventuell liessen sich die auch als Mass verwenden. Mit nem Hall oder Induktivsensor z.B. Die ganze Elektronik könnte in ein oder mehrere Wagen integriert werden. Die Steuerung solcher Teile soll heute fast nur mehr digital passieren. Da wär also nichts zusätzliches mehr nötig, ausser dem, was dafür grundsätzlich erforderlich ist.
@ Chris Vielleicht irre ich mich ja, aber ich fürchte sowas wird es nicht "von der Stange" (sic) zu kaufen geben. Wer, ausser EMV-Labors und eben Du könnte sowas brauchen? Da gingen in Europa vielleicht im Jahr 10 Stück. Oder, was ich eher glaube, der "Markt" wäre Ratz-fatz gesättigt. Ich vermute, dass die tatsächlich im Einsatz befindlichen Vorrichtungen dieser Art eher Eigenkonstruktionen sind. Aber gut. Gleitschiene: Ein paar Rohre mit Verbindern? Auch als Hängebahn vorzustellen? Oder ein langer Tisch mit Seil? (Das wird's vermutlich in den meisten Fällen sein). Entfernungsmessung per Laser? Nicht ganz billig. Aber wie genau brauchst Du's denn?
Genauigkeit ist nicht das große Thema. +/- 5 cm reichen. Geschwindigkeit sollte bis maximal 15 m / s liegen. Die Messungen muss durchaus ein paar hundert mal wiederholt werden. Die Schienen würden wahlweise auf dem Boden liegen oder auf Stelzen stehen. Geld spielt auch nicht unbedingt die Rolle, wenn die Messgeräte schon 6 stellig sind.
Chris schrieb: > Genauigkeit ist nicht das große Thema. +/- 5 cm reichen. Geschwindigkeit > sollte bis maximal 15 m / s liegen. Schön, dass solche "nebensächlichen" Informationen auch irgendwann kommen. Bei 15 m/s dürften viele Modellbahnen passen ;-) Für H0 entspräche das maßstäblich einer Geschwindigkeit von 4700 km/h Vielleicht verrätst du auch noch, wie sauber deine Zigarettenschachtel geführt werden muss und wie der Kostenrahmen für das Projekt aussieht? Und warum muss es unbedingt eine Gleitschiene sein?
Ich würde mal bei IGUS anfragen und denen dein Problem schildern. Sind ziemlich kompetent.
Chris schrieb: > Gleitschiene bis 10 m länge. Chris schrieb: > Geschwindigkeit > sollte bis maximal 15 m / s liegen. Chris schrieb: > Und ich brauche eine > Positionserkennung wo man sich auf der Schiene gerade befindet. Chris schrieb: > Da das ganze Funkt möchte ich auf > dem Schlitten nur die zu testende Platine haben und möglichst wenig > frende Elektronik oder Kabel. Chris schrieb: > Weil möglichst keine zusätzliche Elektronik in der nähe vom DUT sein > soll Chris schrieb: > Geld spielt auch nicht unbedingt die Rolle, wenn die Messgeräte schon 6 > stellig sind. Für einen mittleren fünfstelligen Betrag könnte ich eine fertige Lösung zur Verfügung stellen. :-)
:
Bearbeitet durch User
Chris schrieb: > eschwindigkeit > sollte bis maximal 15 m / s liegen. also deine 10m in 2/3 Sekunden durchfahren? (das ist ja fast ein Geschoß) Ich glaube so schnell ist nicht mal mein "Jagdhund ein Münsterländer" zur Tür gekommen.
Joachim B. schrieb: > also deine 10m in 2/3 Sekunden durchfahren? (das ist ja fast ein > Geschoß) Naja, das ist "Stadtgeschwindigkeit". Allerdings muss man da sicherlich auch wirksame Bremsen einbauen.
Chris schrieb: > Da das ganze Funkt möchte ich auf dem Schlitten nur die zu testende > Platine haben und möglichst wenig frende Elektronik oder Kabel. Darf die Schiene aus Metall sein oder würde das deine Funkwellen unzulässig stören?
Muß es eine Schiene sein? Oder würde ein Seil/Zahnriemen zwischen zwei Punkten, freitragend gespannt auch reichen? Das wäre von Aufbau (und Transport) her wesentlich einfacher.
Welcher Teil der Strecke von den 10m soll denn mit max. Geschwindigkeit befahrbar sein? Und was wiegt die Elektronik? Auf was für einem Boden soll das Ganze einsetzbar sein? Bei glattem Fabrikhallenboden könnte man auch einfach einen Schlitten mit Rädern an einen Zahnriemen hängen.
Chris schrieb: > Geschwindigkeit sollte bis maximal 15 m / s liegen. Bei welcher Beschleunigung? Joachim B. schrieb: > also deine 10m in 2/3 Sekunden durchfahren? (das ist ja fast ein Geschoß) Ich sehe das eher so, dass diese 54km/h die Maximalgeschwindigkeit ist, die bestenfalls am "schnellsten Punkt" der Positionierrampe erreicht wird. Wenn der Schlitten also am Anfang der 10m langen Bahn steht und ans Ende fahren soll, dann müssen die ersten 5m zum Beschleunigen auf die 15m/s verwendet werden und die restlichen 5m zum Abbremsen. Dann brauchen wir also bei einer linearen Rampe eine Beschleunigung von 3m/s². Mit dieser Beschleunigung könnte dann die Gesamtstrecke bei Erreichen der Maximalgeschwindigkeit von 15m/s genau in der Mitte in 2*1,83s = 3,7s zurückgelegt werden. Wenn die Schiene dann aber nur 8m lang ist, wird nach 4m bei den 3m/s² nur eine maximale Geschwindigkeit von 12m/s erreicht.
:
Bearbeitet durch Moderator
Willst du ein modulares System? Sprich einmal 6 einmal 5 und einmal 10m? Ich mach dir sonst ein Angebot, wenn du willst
Angehängte Dateien:
-

Seilbahn.png
140 KB
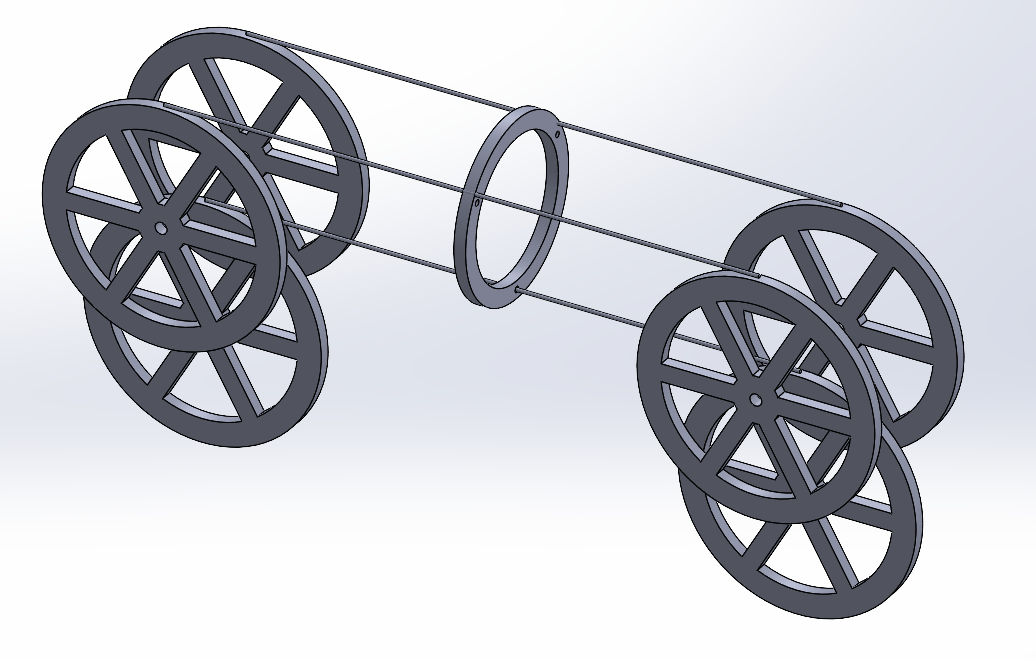
Mich würde interessieren: Wie kann die Bahn während der Messung vor Zugriff geschützt werden? -Kann das gesamte System in ein Rohr eingehaust werden? -Muss das System offen und im Freien laufen? - ich würde mindestens 4 Begleitseile als Seilzug-Not Aus erwarten. Wie mobil muss das System sein? -musst du das alleine innerhalb von einer halben Stunde aufbauen und in Betrieb nehmen können? -Wie viel Konfigurationen müssen unterstützt werden? (je 2 schienen mit 2m, 2.5m und 1.5m würden fast alle Kombinationen erlauben) -Dürfen zb das Zugseil immer passend auf Länge geschnitten werden? Wo wird das System eingesetzt? -in einer Halle? gibt es in der Halle verankerungspunkte? -im Gelände und die Vorrichtung muss auch Unebenheiten ausgleichen können? Was für Anforderungen hast du an die Schiene? -muss es eine Schiene sein? -Welche Materialeinschränkungen hast du? -stört Metall deine Messung? Was misst du? -wie gut müssen die Antriebe und Umrichter abgeschirmt sein? -Wie stark sind die Messfelder gegen die die Umrichter rund Steuerungen abgeschirmt sein müssen?
Er wird sich auf 8m/s maximal beschränken müssen: https://www.hepcomotion.com/de/produkt/fuehrungsschienen/gv3-linearfuehrungen-mit-laufrollen-und-fuehrungsschienen/ https://www.rrg.de/antriebstechnik/linearsysteme/fuehrungsschienen/x-rail-black-fuehrungsschienen/ https://www.franke-gmbh.de/linearsysteme/prinzip/
Dieter D. schrieb: > Er wird sich auf 8m/s maximal beschränken müssen: Richtig, Licht hat ja auch eine magische Obergrenze..
Chris schrieb: > Am > liebsten wäre es mir, wenn der Antrieb nicht auf dem Schlitten sitzt Dann würde ich mich am Transrapid orientieren. Bei 10 m sind die Kosten ja noch überschaubar, jedenfalls im Vergleich zu Hamburg-München. Georg
Analog Gongelbahn, Schießstand ... Ein Motor dreht zwei Spulen mit je 10+x m Seil. Eine Spule ist auf der Achse lös- und fixierbar. Wickelsinn so, das eine auf und die andere abwickelt. Nach dem Aufbau Seile spannen und Spule fixieren. Positionserkennung über Inkrementalgeber an der Achse, Schrittmotor oder Seilzuggeber. Eine Rolle an der Basisstation , Motor am anderen Ende. Endanschlagschalter als breite Wippe an den Spulen. Führung entweder nur vom Seil oder Tragseil oder mit einer Schiene die der gewünschten Genauigkeit der Positionierung entspricht.
Falls du eine absolute Positionierung am Wagen machen möchtest, werfe ich mal den Gray-Code in den Raum. Du kannst an die Schienen einen Streifen mit fortlaufend codierten Segmenten kleben, die dann mit mehreren Lichtschranken abgetastet werden. Ich würde wahrscheinlich mit zwei Streifen arbeiten: Einen Gray-Code der bei allen Schienen gleich ist, um möglichst wenig Bits zu benötigen. Dazu einen statischen 4-Bit Code der die Schienen-Nummer kodiert. Damit kannst du aus dem Stand raus feststellen wo der Wagen steht.
Chris schrieb: > Geld spielt auch nicht unbedingt die Rolle Wenn's wirklich schick sein soll, leicht montierbar, wurde ich in 1m langen Alu-U-Profil-Laufschienen mit Zusammensteckadaptern versehen und an den Enden 2 quer gesteckte Achsen mit Kettenrädern montieren und eine (Fahrrad)kette umlaufen lassen. Auf die Achsen der Kettenräder kommen Zahnräder und jeweils am Ende ein zweites Zahnrad. Steckt man die Stücke ineinander, greifen die Zahnräder ineinander und alle Ketten bewegen sich synchron. Der Schlitten bekommt unten ein paar Zähne, die in die Lücken der Fahrradkette eingreifen, und zwar segmentübergreifend. An einem Ende ein Getriebemotor und die vorbeilaufenden Kettensegmente werden gezählt. So kann man so viele Segmente zusammenstecken wie man mag
MaWin schrieb: > an den Enden 2 quer gesteckte Achsen mit Kettenrädern montieren und eine > (Fahrrad)kette umlaufen lassen. > Auf die Achsen der Kettenräder kommen Zahnräder und jeweils am Ende ein > zweites Zahnrad. > Steckt man die Stücke ineinander, greifen die Zahnräder ineinander und > alle Ketten bewegen sich synchron. Jo, bei 15 m/s auf einer Strecke von 10m... Lothar M. schrieb: > Beschleunigen auf die 15m/s verwendet werden und die restlichen 5m zum > Abbremsen. Dann brauchen wir also bei einer linearen Rampe eine > Beschleunigung von 3m/s². Bei 3 m/s² dauert es aber, tja, 5 Sekunden, bis Du 15 m/s erreicht hast... Dann hast Du aber schon 37,5 Meter zurück gelegt... Blöd das die Strecke nur 10 Meter lang ist... > Wenn die Schiene dann aber nur 8m lang ist, wird nach 4m bei den 3m/s² > nur eine maximale Geschwindigkeit von 12m/s erreicht. Weil? Weil 4 **Meter** mit 3 **Meter pro Sekunde** multipliziert 12 **Quadratmeter pro Sekunde** ergibt? Oder was? Man, man, man...
Ach, und das Forum hat zwei unterschiedliche Renderer für Vorschau und tatsächlicher Beitrag... Das verdient auch den EDV-Preis der Bundesregierung...
Angehängte Dateien:
Experte schrieb: > Ach, und das Forum hat zwei unterschiedliche Renderer für Vorschau > und tatsächlicher Beitrag... > Das verdient auch den EDV-Preis der Bundesregierung... Gut erkannt. Mach mal was in kursiv. Das ist dann final unterstrichen, obgleich es in Vorschau okay aussieht. Grins ... kursiv
Äxl schrieb: > Experte schrieb: > >> Ach, und das Forum hat zwei unterschiedliche Renderer für Vorschau >> und tatsächlicher Beitrag... >> Das verdient auch den EDV-Preis der Bundesregierung... > > Gut erkannt. Mach mal was in kursiv. > Das ist dann final unterstrichen, obgleich es in Vorschau okay aussieht. > Grins ... kursiv Heute mitm iPhone geht's mal. Auf Arbeit am Laptop nich. 😅 Haha
Meine Überschlagsrechnung Masse des Schlittens mit Platine 500g Kraft 20N Beschleunigung 40 m/s² Beschleunigungungsstecke 3m Endgeschwindigkeit 15,5 m/s Beschl.Dauer 0,387s Kraft wirk instantan , Trägheit des Antriebs nicht eingerechnet, die 40m/s² sind halt bei 3m, für 5m braucht es nur noch 24m/s² (~0,65s) Oder: Nimm eine größere Halle und lasse die Platine mit r=5m rotieren :) (Ich hab a jetzt ein Bild im Kopf, wie sich die Platine in die Basisstation/Messtechnik eingräbt :> ) Der Sicherheitsbeauftragte wird sich freuen :) Ich würde mal bei Festo, SEW und Anlagenbauern anfragen...
Linearsysteme für höhere Geschwindigkeiten gibt es u.a. auch von NSK. Antrieb des Schlittens geht mit Seil. Interessanteste Aufgaben dabei: Das Seil kann schlagen, durchhängen bei Beschleunigung. Ausgabegeschwindigkeit und Verarbeitung der Positionsdaten aus dem Stellantrieb, das müßte ein Servoantrieb sein aus positionierfähigem Umrichter + passendem Motor. IDR werden die über Bussystem und SPS angesteuert, da entstehen Laufzeiten.
Henrik V. schrieb: > Beschleunigung 40 m/s² Das fällt schon unter folgende Tests https://www.lne.fr/en/testing/vibration-shock-constant-acceleration MIL-STD 810, RTCA DO-160, IEC 61373, ISO 16750, Lloyd Specifications, IEC 60068.
Helge schrieb: > positionierfähigem > Umrichter + passendem Motor Was man braucht ist eine Servo-Antrieb wie an einer Werkzeugmaschine, nur eben für eine Achse. Das kann man kaufen. Allerdings setzt das eine genaue Positionserfassung voraus, was bei 10m nicht ganz trivial ist, meines Wissens gibt es keine solchen Glasmassstäbe und meterweise aneinanderstückeln kann man die auch nicht ohne weiteres. Bei einem Seilantrieb o.ä. könnte man einen Drehgeber verwenden. Dehnung des Seils usw. muss berücksichtigt oder verhindert werden. Georg
Georg schrieb: > Was man braucht ist eine Servo-Antrieb wie an einer Werkzeugmaschine, > nur eben für eine Achse. Das kann man kaufen. Allerdings setzt das eine > genaue Positionserfassung voraus, die Antriebe gibts mit eingebauten Resolvern und man kann eine Linearachse damit mm genau positionieren. 15 m/s ist allerdings schon sehr zügig, ich habe eine 5 m lange mit 10 m/s (max. der Linerachse) und 5 kW Motor dran. Das macht schon Angst... Und sowas kostet ne Kleinigkeit.
Beitrag #6626612 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.