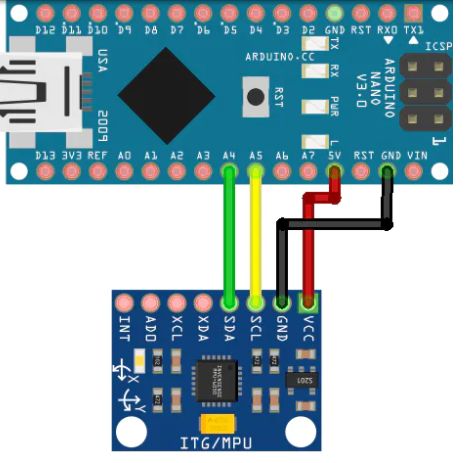
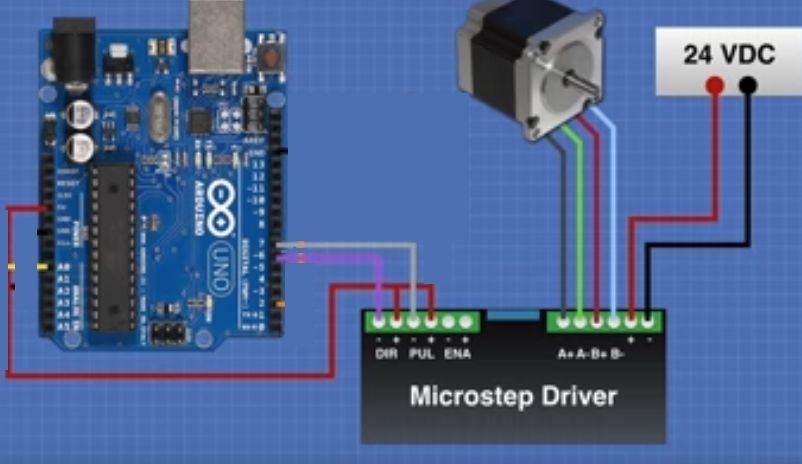
Hallo, ich habe ein Problem: Ich baue gerade eine 2DOF Motionplattform und will ein MPU6050 über I2C einbauen, um die Orientierung der Plattform zu kontrollieren. Als Motoren nutze ich 2x Nema 23 mit DM556 als Treiber. Die Schematic ist wie im Video und geht auf einen Arduino Mega. https://youtu.be/iY_4YOlpqyI?t=958 Problem ist folgendes: jedes mal wenn ich die Stepper Treiber mit Strom versorge 24V 5A, wird die I2C Verbindung zum MPU6050 unterbrochen und der Controller hängt sich auf. Der Sensor ist an der Plattform befästigt und mit ca. 40cm langen 24AWG Kabeln mit dem Arduino verbunden. Wenn ich kürze dünnere Jumper benutze funktioniert alles wunderbar. Wie kann ich das Problem beheben? Und warum killt der Treiber überhaupt meine I2C Verbindung, hat da jemand eine Idee? Was ich bereits versucht habe: - 24 AWG Kabel wechseln, neu Löten - Kondensator an den Sensor 100uF - Kondensator an die Spannugnsausgang des Arduino - MPU6050 mit einem zweiten Arduino mit strom versorgen und den anderen mit GND verbinden - Einen zweiten Arduino der die Pulse sendet, verbunden mit dem anderen über digital pins, signale werden weiter gegeben, verbunden über GND Sobald der Stromkreis irgendwie verbunden ist, wird meine I2C verbindung in irgendeiner Form beeinträchtigt, sodass das MPU6050 hängen bleibt. Mit Mosfets würde es natürlich gehen, aber irgendwas sagt mir, dass es einfacher gehen muss, schleißlich ist doch der Sinn eines Treibers die Stromkreise zu seperieren. Mir gehen die Ideen aus, hoffe irgendjemand kann mir helfen.
Deine Motorsteuerung stört. Wie lang sind die Kabel auf denen die Leistung zwischen Treiber und Motor läuft? Wie groß sind deine pull-ups an i2c und welche Spannung ist da drauf? Probier Mal geschirmte Leitungen zu nutzen, mit Schirm einseitig auf und gelegt.
Dunno.. schrieb: > Probier Mal geschirmte Leitungen zu nutzen, mit Schirm einseitig auf und > gelegt. Schirm auf gnd, sollte das heißen.
Angehängte Dateien:
-

Schematic.bmp
640 KB -

Neue_Bitmap.bmp
1,1 MB
{kind=link}
{kind=link}
Dunno.. schrieb: > Deine Motorsteuerung stört. Wie lang sind die Kabel auf denen die > Leistung zwischen Treiber und Motor läuft? Diese Kabel sind ca. 40cm lang und sind fest am Motor montiert. > Wie groß sind deine pull-ups an i2c und welche Spannung ist da drauf? Die im Arduino Mega sind laut Internet: "On the Arduino Mega 2560 board are pullup resistors of 10k for SDA and SCL. The internal pullup resistors of the ATmega2560 chip are about 50k." 10k(?) > Probier Mal geschirmte Leitungen zu nutzen, mit Schirm einseitig auf gnd > gelegt. Ich bin mir nicht sicher was eine geschirmte Leitung ist. Was bedeutet dies?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.