Hallo,
ich habe einen Schrittmotor über eine Spindel an einen Kolben verbunden,
um eine Flüssigkeit mit einer gewissen Geschwindigkeit ausströmen zu
lassen.
Die Sollgeschwindigkeit bekomme ich aus einem Regler alle 10ms. Jede
Millisekunde berechne ich momentan die aktuelle Frequenz des Timers der
die Pulse für den Motor ausgibt.
Kann jemand was zu diesen Zeiten sagen? ich hatte die
Schrittmotorberechnung zunächst auch nur alle 10ms aufgerufen, doch mir
erscheint der Wert etwas klein. Deshalb habe ich einen neuen Timer
hierfür verwendet.
Bisher habe ich die Geschwindigkeit linear um einen Beschleunigungswert
erhöht. Das funktioniert ohne Flüssigkeit auch gut. Leider passiert es
oft, dass wenn ich erst bremse und dann wieder beschleunigen muss, dass
ich Schritte verliere.
Deshalb würde ich gerne linear Beschleunigen, da ich vermute dass genau
dieser Ruck zum Schrittverlust führt.
Ich habe mir zwar schon etwas ausgedacht, doch fehlt es hier an Details.
Beispielsweise muss ich ja abbremsen bevor ich an das Zylinderende
pralle. Auch "schwingt" das Ganze auch um den Sollwert, da ich
vermutlich die Dauer bis zum erreichen der Geschwindigkeit falsch
berechne.
Ich weiß ich habe schon einmal irgendwo eine Implementierung für
3D-Drucker irgendwo gesehen, bei der auch eine hervorragende Erklärung
mit dabei war, leider finde ich diese nicht. Ich meine da wurden sogar
noch weitere Ableitungen als nur der Jerk mit beachtet.
Um den "zeig mal her was du hast" "Antworten", bei denen danach keine
Antwort mehr kommt im Voraus etwas entgegenzuwirken, hier einmal mein
Code. Aber wie gesagt, eigentlich bin ich auf der Suche nach etwas
fertigen, denn ich bekomme immer einen Knoten im Hirn wenn ich daran
denke die Beschleunigung zu verringern, da man ja dann immer noch
beschleunigt, nur nicht so schnell :D
Anmerkungen:
Das Motorstruct hat eine targetvelocity und eine aktuelle
"verlocity_in_steps"
Der "celleration" Wert soll beim Motor speichern welche Bescheunigung er
gerade hat. Positiv bedeutet der Motor hat im letzten Schritt die
beschleunigung erhöht, Negativ er hat sie verringert.
1
#define servorate 1000.0f //has to fit to the servo rate set with timer 13 //now timer 6
2
3
#define accel_raw 200.0f //steps per second^2
4
#define deccel_raw 200.0f //steps per second^2
5
#define accel (accel_raw*microsteps/servorate) //microsteps per servoloop
6
#define deccel (deccel_raw*microsteps/servorate) //microsteps per servoloop
7
#define max_speed (max_motor_speed*fullsteps_per_rev*microsteps) //max Motor speed in microsteps/s
8
#define jerkstepsacc 50.0f
9
#define jerkstepsdecc 50.0f
10
#define jerkacc (accel/jerkstepsacc)
11
#define jerkdec (deccel/jerkstepsdecc)
12
13
uint32_tSet_Stepper_Velocity(MOTOR*Motor)
14
{
15
uint32_ttimervaluebuffer=0;
16
int32_tacceleration=0;
17
int32_tdecceleration=0;
18
uint8_tpositivedirection=0;
19
uint8_taccelerate=0;
20
uint32_ttemp_vel=0;
21
uint32_ttemp_vel_sq=0;
22
23
if(Motor->direction*Motor->targetvelocity>max_speed)//not faster than allowed
Gerald M. schrieb:> Deshalb würde ich gerne linear Beschleunigen, da ich vermute dass genau> dieser Ruck zum Schrittverlust führt.
Du brauchst eine konstante Beschleunigung, i.e. die Geschwindigkeit muss
sich linear ändern. Schrittverluste bekommst du bei zu schneller
Geschwindigkeitsänderung.
Hast du die Atmel AppNote AVR446 - Linear speed control of stepper motor
gelesen (jetzt MicroChip AN_8017 ).
http://ww1.microchip.com/downloads/en/AppNotes/doc8017.pdf
Wenn bei deinem Aufbau beim Ändern der Beschleunigung Schwingungen
angeregt werden können, musst du zur Vermeidung zusätzlich dafür sorgen,
dass der Ruck nur niedrige Werte annimmt.
Gerald M. schrieb:> Um den "zeig mal her was du hast" "Antworten", bei denen danach keine> Antwort mehr kommt im Voraus etwas entgegenzuwirken, hier einmal mein> Code.
Um den "Pack den Code in den Anhang" "Antworten", bei denen danach keine
Antwort mehr kommt im Voraus etwas entgegenzuwirken, Pack den Code in
den Anhang.
Anmerkungen: Du weißt jederzeit wie lang deine Bremsrampe in Schritten
ist? Dann musst du vor erreichen des Zylinderendes eben schauen, ob
diese Anzahl Schritte noch in den restlichen Verfahrweg passen.
Für Vorausberechnung von Rampen kannst du, um Strecke, Geschwindigkeit,
Beschleunigung, Ruck/Jerk in n-ter Ableitung ohne Sprungstellen zu
haben, zum Beispiel (cos(x) + 1)/2 benutzen.
mfg mf
Wolfgang schrieb:> Du brauchst eine konstante Beschleunigung, i.e. die Geschwindigkeit muss> sich linear ändern. Schrittverluste bekommst du bei zu schneller> Geschwindigkeitsänderung.
Nein, ich hätte gerne eine lineare Beschleunigung, also einen konstanten
"Ruck" (Ruck ist die Ableitung der Geschwindigkeit). Eine konstante
Beschleunigung hatte ich bereits davor implementiert.
Achim M. schrieb:> Anmerkungen: Du weißt jederzeit wie lang deine Bremsrampe in Schritten> ist?
Nein, das wusste ich vorher, als die Beschleunigung noch kosntant war.
Da ist es einfach (tatsächlich ist die Formel so noch im Sourcecode, da
ich dachte dass es eventuell nicht so viel ausmacht. Auch ist das
Vergleichen der Schritte zum Ende noch drin). Jetzt ist es komplizierter
zu rechnen.
Achim M. schrieb:> Beispiel (cos(x) + 1)/2 benutzen
was heißt hier x? Mit diesem Satz kann ich leider nichts anfangen. Wo
ist hier Beschleunigung und Ruck?
Spess53 schrieb:> Such mal nach AN_8017. Da hat Atmel das vor 15 Jahren schon vorgekaut.
Nein haben sie nicht.
Gerald M. schrieb:> Nein, ich hätte gerne eine lineare Beschleunigung, also einen konstanten> "Ruck" (Ruck ist die Ableitung der Geschwindigkeit). Eine konstante> Beschleunigung hatte ich bereits davor implementiert.
Schon bei konstanter Beschleunigung bekommst du bei Antrieb einer fest
an den Motor angekoppelten Masse keine Schrittverluste, weil konstante
Beschleunigung konstantes Drehmoment bedeutet und das Drehmoment die
Ursache für den Lastwinkel ist.
Mit dem Ruck hat das nur zu tun, wenn die Schwingfähigkeit deines
Systems die Ursache ist. Du kannst entweder wild rumpobieren oder du
analysierst dein anzutreibendes System.
Wolfgang schrieb:> Gerald M. schrieb:>> Nein, ich hätte gerne eine lineare Beschleunigung, also einen konstanten>> "Ruck" (Ruck ist die Ableitung der Geschwindigkeit). Eine konstante>> Beschleunigung hatte ich bereits davor implementiert.>> Schon bei konstanter Beschleunigung bekommst du bei Antrieb einer fest> an den Motor angekoppelten Masse keine Schrittverluste, weil konstante> Beschleunigung konstantes Drehmoment bedeutet und das Drehmoment die> Ursache für den Lastwinkel ist.> Mit dem Ruck hat das nur zu tun, wenn die Schwingfähigkeit deines> Systems die Ursache ist. Du kannst entweder wild rumpobieren oder du> analysierst dein anzutreibendes System.
Hi,
danke, ich weiß das. Ich kenne auch die Energieverteilung für die
Frequenzen. Und bei mir hat selbst eine deutliche Anhebung des Stroms
nicht wirklich geholfen, weshalb ich eben jetzt "ruckfrei" anfahren und
Bremsen möchte.
Hugo H. schrieb:> Damit kannst Du rumspielen - die Formeln sind auch zu sehen - muss nur> umgesetzt werden. Ich habe Code für den ATXMega dazu - aber "sehr> speziell" :-)
Danke auch dir, ich kann leider erst später rein schauen.
Gerald M. schrieb:> danke, ich weiß das. Ich kenne auch die Energieverteilung für die> Frequenzen.
Warum sagst du dann "... ich vermute ..."
Hast du es schon mal mit einem Rotationsdämpfer probiert um die Güte
deines Systems zu reduzieren?
Ich vermute es weil ich es noch nicht mit linearer Beschleunigung testen
konnte.
Der Aufbau ist fix, daran kann ich nicht wirklich etwas ändern. Ist ein
Schrittmotor auf Gummipuffern, der über ein Zahnrad und Riemen an die
Spindel verbunden ist.
Eigentlich sollte das System auch recht gut gedämpft sein, da ja der
Kolben über die Kolbenringe an der Zylinderwand rutscht. Aber gerade die
haben ja auch etwas Spiel, da sie nicht direkt gleiten sondern erst noch
etwas haften. Das merkt man schon beim Drehen mit der Hand. Der Riemen
sollte sich etwas dämpfen.
Es ist auch immer nur ein kurzer Moment in dem er Schritte verliert.
Achja, und ich habe außerdem keinen Rotationsdämpfer (und auch keinen
Platz am Motor um ihn zu montieren)
Kannst Du so ein Pulspaket einer Rampe loggen (Zeitstempel)?
Nicht, dass Du durch das Herumschreiben im Timer innerhalb der Pulsdauer
Pulse verlierst und in Wirklichkeit nur ein riesiger Jitter Dein Problem
ist.
Hallo,
ich habe auch lange Zeit Probleme mit Schrittverlusten bei meinem
Selbstbau-Plotter gehabt. Erst der Einbau von einem Motortreiber mit
Mikroschritt brachte Abhilfe. Geht meinetwegen ein Achtelschritt
verloren, stimmt die Position beim nächsten Schritt wieder. Der Motor
läuft auch deutlich ruhiger.
Gruß Carsten
Carsten-Peter C. schrieb:> Geht meinetwegen ein Achtelschritt> verloren, stimmt die Position beim nächsten Schritt wieder.
Ein einzelner Achtelschritt kann bei einem Schrittmotor nicht verloren
gehen. Wenn das wirklich passiert sein sollte, sind Pulse woanders
hängen geblieben.
Wolfgang schrieb:> Ein einzelner Achtelschritt kann bei einem Schrittmotor nicht verloren> gehen.
Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.
Nach meinen Erfahrungen dann, wenn der Motor einen Schritt macht, durch
den Schwung schon ein wenig weiterdreht, zurückgezogen wird und dann
erst den neuen Vorwärtsschritt bekommt. Also besonders bei einer flachen
Linie bzw. ungünstigen Drehzahlen. Nach Umstellung auf Achtelschritt war
das Problem beseitigt. Die Rampe hat da bei meinem Projekt eine eher
kleinere Rolle gespielt.
Gruß Carsten
Carsten-Peter C. schrieb:> Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.
Schritte können in allen Schrittmodi verloren gehen, aber eben nicht als
Einzelschritt. Bei Vollschrittbetrieb entsteht ein Versatz von
Vielfachen von 4 Schritten, bei Halbschritt von 8 Schritten usw.
Wenn Mikroschrittbetrieb zu weniger Fehlern führt, liegt das an
Resonanzen/Schwingungsanregung.
Walter T. schrieb:> Kannst Du so ein Pulspaket einer Rampe loggen (Zeitstempel)?> Nicht, dass Du durch das Herumschreiben im Timer innerhalb der Pulsdauer> Pulse verlierst und in Wirklichkeit nur ein riesiger Jitter Dein Problem> ist.
Sollte tatsächlich nicht so sein, da der STM32 ja ein Shadow Register
(falls das der richtige Name ist) hat, der den neuen Wert erst nach
einem Interrupt ändert, um genau das zu vermeiden.
Ansonsten kann ich noch erwähnen, dass ich 256x Mikroschritte nutze
(Treiber ist der TMC2660) weshalb ich auch nicht daran glaube dass
einzelne Pulse verloren gehen (auch wenn ich mit sehr hoher Rate den Pin
toggle).
Der Treiber hat auch umfangreiche Einstellungsmöglichkeiten, wobei ich
bisher meist Datenblatt- Standardwerte nutze.
Aber wie gesagt, es ist eben sehr auffällig dass in bestimmten
Situationen die Schritte verloren gehen. (Genau dann wenn eben
Resonanzen angeregt werden können)
Hallo Gerald,
"sollte" ist bei mir ein häufiger Faktor, der ein Erschwerung der
Fehlersuche bewirkt. Aber das ist erst einmal meine private Meinung.
Gerald M. schrieb:> Ich weiß ich habe schon einmal irgendwo eine Implementierung für> 3D-Drucker irgendwo gesehen, bei der auch eine hervorragende Erklärung> mit dabei war, leider finde ich diese nicht.
Bei 3d-Druckern ist der "Jerk" aber etwas anderes. Er ist die
physialisch inkorrekte Bezeichnung dafür, dass die Geschwindigkeitsrampe
nicht bei der Geschwindigkeit 0 startet, sondern bei einer höheren
Geschwindigkeit. Das ist bei vielen Schrittmotor-Antrieben möglich
(siehe Skizze).
Gerald M. schrieb:> Ansonsten kann ich noch erwähnen, dass ich 256x Mikroschritte nutze> (Treiber ist der TMC2660)
Mit den kleinen Treibern habe ich wenig Erfahrung, aber bei den größeren
sind kleinere Mikroschritt-Faktoren oft gutmütiger.
Aber wenn das Problem wirklich ein Resonanzeffekt ist, besteht die
einzige echte Lösung darin, im Resonanzbereich nur so kurz wie möglich
zu sein. Klassiker, der hier im Thread an mehreren Stellen vorgeschlagen
wurde, waren dämpfende Elemente, die auch die Resonanzfrequenz absenken.
Die andere Variante ist, das System steifer zu machen, die
Resonanzfrequenz also anzuheben und unterhalb der Resonanzfrequenz zu
operieren.
Aber ich würde jetzt erst einmal den "sollte"-Teil überprüfen. Das hält
den Rücken frei.
Walter T. schrieb:> Aber wenn das Problem wirklich ein Resonanzeffekt ist, besteht die> einzige echte Lösung darin, im Resonanzbereich nur so kurz wie möglich> zu sein.
Das ist keine Garantie. Die Resonanzschwingung kann genauso gut durch
einen Sprung in der Beschleunigung, i.e. durch den Ruck angeregt werden.
Wolfgang schrieb:> Das ist keine Garantie. Die Resonanzschwingung kann genauso gut durch> einen Sprung in der Beschleunigung, i.e. durch den Ruck angeregt werden.
Bei einem Schrittmotor-Spindeltrieb bin ich Herr über die Positionsebene
(Ort, Geschwindigkeit, Beschleunigung, Ruck) - ansonsten läuft
irgendetwas schief. Angeregt werden kann nur über die Kraftebene.
Walter T. schrieb:> Angeregt werden kann nur über die Kraftebene.
Eben. Und wenn mit dem in der Atmel AppNote AVR446 beschriebenen
Algorithmus die Beschleunigung hart umgeschaltet wird, tritt eine harte
Kraftänderung und damit ein hoher Wert für den Ruck auf. Da hat Gerald
schon Recht. Deshalb oben die explizite Frage nach der Schwingfähigkeit
seines Systems ...
Man definiere bitte mal was ein Ruck sein soll? Und woher weißt du das
du überhaupt Schrittverluste hast? Hast du dir mal Gedanken über
Massenträgheit gemacht? Und das mit den Resonanzen hast du auch noch
nicht so verstanden. Zur Anregung reichen Imperfektionen. Und wenn du
eine "lineare Beschleunigung willst, sollte das dann nicht wenigsten
bi-linear sein, oder willst du wirklich einen Sägezahn? Ich frag mich
auch, wenn du alle 10 ms nachregelst, wo das noch die Zeit für solch
Spielerei sein soll.
Ich würde behaupten dein Regler/Regelkreis schwingt (Vollgas/Bremse) und
davon gibt dein "Ruck".
Gerald M. schrieb:>> Ich weiß ich habe schon einmal irgendwo eine Implementierung für> 3D-Drucker irgendwo gesehen, bei der auch eine hervorragende Erklärung> mit dabei war, leider finde ich diese nicht. Ich meine da wurden sogar> noch weitere Ableitungen als nur der Jerk mit beachtet.>
möglicher das da
https://github.com/synthetos/TinyG/wiki/Jerk-Controlled-Motion-Explained
Die verwenden Bezier-Kurven um das Geschwindigkeitsprofil zu erzeugen.
Von einer konstanten Geschwindigkeit zu einer anderen wird die
Beschleunigung über so eine Bezier-Kurve "erzeugt" in der Art, dass zu
Beginn/Ende nicht nur die Beschleunigung = 0 ist, sondern auch der Ruck
und die Ableitung des Rucks 0 sind.
Die Bezier-Polynome haben einige "schöne" Eigenschaften und es gibt
Haufen Literatur und Algorithmen in der Computergrafik dazu.
Soweit ich mich erinnere ist im Code auch eine brauchbare Erklärung zu
finden wie man das alles per "forward differentiation" auf einem µC in
vernünftiger Geschwindigkeit umsetzt.
Karl schrieb:> Man definiere bitte mal was ein Ruck sein soll?
Ruck ist die Änderung der Beschleunigung (nicht der Geschwindigkeit wie
weiter oben irgendwo geschrieben, vermutlich Tippfehler).
Näherungsweiser Vergleich mit Gaspedal/Bremspedal am Auto: konstante
Beschleunigung würde heissen, beim Beschleunigen / Bremsen die
Pedalstellung sprunghaft zu ändern und dann so zu halten, also z.B.
Vollgas zu geben (bzw. Vollbremsung zu machen). Abrupte Betätigung des
Gas- oder Bremspedals erzeugt einen Ruck. Darum betätigt man Fahr- und
Bremspedal im Normalfall nicht ruckartigt.
Gerald M. schrieb:> Hallo,>> ich habe einen Schrittmotor über eine Spindel an einen Kolben verbunden,> um eine Flüssigkeit mit einer gewissen Geschwindigkeit ausströmen zu> lassen.>> Die Sollgeschwindigkeit bekomme ich aus einem Regler alle 10ms. Jede> Millisekunde berechne ich momentan die aktuelle Frequenz des Timers der> die Pulse für den Motor ausgibt.> Kann jemand was zu diesen Zeiten sagen?
Meiner Meinung nach der falsche Ansatz dort im Zeitinterval etwas zu
machen.
Ich hatte vor Jahren sowas ähnliches programmiert und dort war der
aktuelle Impuls Basis für den nächsten Step.
Somit war sicher gestellt das von Step zu Step exakt die gewünschte
Beschleunigung/Verzögerung dem Motor gegeben wurde.
Nur so konnte er die Last sauber ohne Schrittverluste (und damit
Totalverlust) hoch fahren.
Die Magie liegt in der exponentiellen Kurve, Taktfrequenz, Timergröße
und so.
Ich hatte das mit einem 8051 in Assembler realisiert und für die
Timerwerte ein 512 Byte großes Array berechnet.
Die untere Hälfte wurde der Timerinterrupt mehr als einmal benutzt bevor
ein neuer Step zum Motor ging, aber der Mitte wars dann nur noch einer
und je schneller es wurde desto kleiner wurde der Timerwert.
Auch wurde klar das am Ende der Beschleunigung ein Wechsel von a auf 0
ebenfalls ein Problem darstellt.
Die bereits angesprochenen Bezier-Kurven sind da durchaus eine
Möglichkeit.
Mal quergedacht (nicht im Sinne der Querschläger!)
Könnte es sein, dass der Schrittverlust etwas mit dem Losbrechmoment des
Kolbens zu tun hat.
Jeder der mal eine Einwegspritze in der hand hatte weiss, dass man ein
deutlich höheres Moment braucht bis der Kolben in Bewegung kommt.
Gerald M. schrieb:> Achim M. schrieb:>>> Beispiel (cos(x) + 1)/2 benutzen>> was heißt hier x? Mit diesem Satz kann ich leider nichts anfangen. Wo> ist hier Beschleunigung und Ruck?
x die Zeit und das Ergebnis der Weg.
Plotte dir das mal von x=[0...π] dann kannst du vielleicht was damit
anfangen.
Warum einen COS benutzen? Tja, ...
Die erste Ableitung Geschwindigkeit ist dadurch schon mal stetig und
ohne Knicke.
Die zweite Ableitung Beschleunigung ist dadurch schon mal stetig und
ohne Knicke.
Die dritte Ableitung Ruck ist damit schon mal stetig und ohne Knicke.
Die vierte ...
mfg mf
PS. Da der COS eine Steigung von 1 im Wendepunkt hat, kann man diesen
Zustand beliebig lang beibehalten. Das wäre dann die normierte
Geschwindigkeit '1'.
Zunächst einmal danke für die ganzen Antworten.
Nein nächstes Vorgehen wird so sein:
Ich werde auf Fehlersuche in meinem Code gehen. Grundsätzlich
funktioniert er ja, nur die "Abbruchbedingung" für das Beschleunigen ist
nicht ganz korrekt weshalb immer um die Zielgeschwindigkeit
"geschwungen" wird.
Des Weiteren werde ich überprüfen ob ich die Gummi-Halterungen des
Motors entweder gegen härtere eintausche oder ganz entferne. Ich hatte
sie eingebaut um die Übertragung der Motorgeräusche auf den Rahmen zu
vermindern. Allerdings hatte das keinen wirklichen Effekt, da die
Motoren durch die Mikroschritte sowieso recht ruhig sind. Ich habe sie
dann drin gelassen weil ich dachte sie Schaden nicht. Ich kann mit
nämlich auch vorstellen dass durch den Ruck beim plötzlichen
Beschleunigen auch der ganze Motor Recht weit bewegt wird was sicher
nicht gut ist.
Funktioniert alles soweit, werde ich die lineare Beschleunigungsrampe
(ich teile momentan die maximale Beschleunigung durch 50 und diese wird
dann eben um diese Schritte erhöht) durch eine Look-up-Table erweitern,
dass ich keine lineare Beschleunigungsrampe habe, sondern eben eine
Cos-artige. Das gefällt mir. Vermutlich werde ich mir dann die Schritte
bis zur vollen Beschleunigung entweder ebenfalls per LUT berechnen, da
ich ja momentan von einer linearen Rampe ausgehe (bei 30/50 der
Beschleunigung brauche ich ja 0.5*30*31/50 an Teilen der Bescheinigung
zum bremsen)
Außerdem werde ich noch nach der Anleitung des Treiber-Herstellers und
mit einem Oszilloskop die Ansteuerung des Motors optimieren.
Ich melde mich. Ergänzungen sind auch in der Zwischenzeit willkommen.
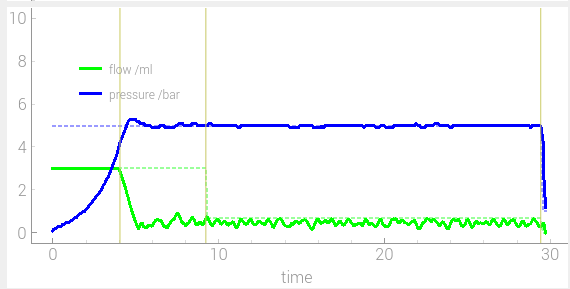
Also der Code läuft schonmal.
Das ganze sieht jetzt aus wie angehängt. Scope3 zeigt die
Geschwindigkeit bei zwei Steps von 0 auf 2, dann wieder auf 0 und am
Ende auf 5.
DBG1 zeigt die momentane Beschleunigung. Diese habe ich in 500 Teile
unterteilt.
Ich habe "etwas" Jitter auf den Messungen, da ich die Schritte usw. via
TCP/IP alle 50ms in Simulink hole und auch die Sollwerte für den Flow in
Simulink stelle.
Man sieht, dass meine Rechnung nicht ganz korrekt ist, so dass der
Controller manchmal doch noch etwas beschleunigen/bremsen muss um die
Zielgeschwindigkeit exakt zu treffen (siehe Zoom.png). Das ist aber
minimal und ich werde es verschmerzen.
Hallo Gerald,
Gerald M. schrieb:> Wolfgang schrieb:>> Du brauchst eine konstante Beschleunigung, i.e. die Geschwindigkeit muss>> sich linear ändern. Schrittverluste bekommst du bei zu schneller>> Geschwindigkeitsänderung.>> Nein, ich hätte gerne eine lineare Beschleunigung, also einen konstanten> "Ruck" (Ruck ist die Ableitung der Geschwindigkeit). Eine konstante> Beschleunigung hatte ich bereits davor implementiert.
Ruck ist die Ableitung der Beschleunigung. Im Umkehrschluss bedeutet
linear steigende Beschleunigung quadratisch steigende Geschwindigkeit.
Und da hast du die Ursache für deine Schrittverluste ;)
Du suchst also besser nach einer Ruck-begrenzten Beschleunigungsrampe.
https://de.wikipedia.org/wiki/Ruck
Gruß
Tom
Ich wünsch viel spass, ...
Riehmen antrieb bedeutet Federsystem, ... Beim anfahren spannst du erst
den riehmen, bis die spannung in dem System so gross ist die Haftreibung
deines Kolbens zu überwinden. Dabei lägt sich auch der rimen ein wenig.
Danach zieht sich der rimen wieder zusammen, ...
Deine Maximale beschleunigung wird abhäng von der geschwindigkeit sein.
Hier spiel ja auch reibungsverhältisse der Mechanik, Drehmoment des
Motors, ... alles mit rein. Und das ganze ist sicher über die Zeit /
Temperatur nicht konstant, ...
Bremsen, ... ist auch so eine kust für sich, ... je nach mechanik, und
vorgabe muss man langsam runter fahren, oder es reicht abschalten /
windungen kurzschliessen, oder mann muss ggf sogar hart "gegen
bestromen"
Hallo Tom,
ja, die Geschwindigkeit läuft quadratisch hoch und runter.
Aber nur bis die Beschleunigung ihren maximalen Wert erreicht hat. Dann
hält die Beschleunigung ihn, was zu einer linear zunehmenden
Geschwindigkeit führt. Daraus resultiert ein S-förmiger Verlauf der
Geschwindigkeit --> keine Schrittverluste.
Wie die Beschleunigung und die Geschwindigkeit dann aussehen siehst du
außerdem in meinem Post genau über deinem.
@123
Läuft schon :)
Für das Bremsen habe ich einen eigenen "Beschleunigungswert". Im Moment
ist er so groß wie die positive Beschleunigung, allerdings kann man ihn
vermutlich deutlich größer machen (= schneller bremsen als losfahren).
Das ist aber nicht nötig.
Gerald M. schrieb:> Deshalb würde ich gerne linear Beschleunigen,
Das führt aber auch zu einem Puls, weil die 1. Ableitung konstant ist.
Das ist so, wie eine Wasserwelle vor dir herschieben. Bei Motoren haben
wir aber mit zunehmender Geschwindigkeit steigende Verluste und
Getriebeschwingungen. Damit muss immer mehr Strom eingeprägt werden,
dessen Verluste dann nichtlinear in Schwingungen und Reibung gehen. Das
födert das Ruckeln.
Carsten-Peter C. schrieb:> Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.
Das stimmt nicht ganz. Wenn der Motor anfängt, hinterher zu hinken, dann
ist der Verlust da und gfs nicht mehr zu kompensieren. Nur Messen kann
man ihn direkt nur bei einem Vollschritt. Dazwischen ist
Signalauswertung gefragt.
Hallo,
Carsten-Peter C. schrieb:> Wolfgang schrieb:>> Ein einzelner Achtelschritt kann bei einem Schrittmotor nicht verloren>> gehen.>> Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.> Nach meinen Erfahrungen dann, wenn der Motor einen Schritt macht, durch> den Schwung schon ein wenig weiterdreht, zurückgezogen wird und dann> erst den neuen Vorwärtsschritt bekommt. Also besonders bei einer flachen> Linie bzw. ungünstigen Drehzahlen. Nach Umstellung auf Achtelschritt war> das Problem beseitigt.
Das zeigt nur, dass die Resonanzen reduziert wurden und damit die
Auftrittswahrscheinlichkeit für Schrittverluste. Auftreten können
Schrittverluste aber auch bei Mikroschritt, spätestens wenn die Last das
aktuelle Drehmoment des Motors überschreitet.
Mit freundlichen Grüßen
Thorsten Ostermann
Hallo Harald,
Harald E. schrieb:> Carsten-Peter C. schrieb:>> Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.>> Das stimmt nicht ganz. Wenn der Motor anfängt, hinterher zu hinken, dann> ist der Verlust da und gfs nicht mehr zu kompensieren. Nur Messen kann> man ihn direkt nur bei einem Vollschritt. Dazwischen ist> Signalauswertung gefragt.
Nein, du wirfst hier Schleppfehler/Lastwinkel und Schrittverlust
durcheinander. Ein Schrittmotor im open-loop Betrieb kann man sich
Modellhaft als Drehfeder vorstellen. Diese Feder wird unter Last
ausgelenkt. Zu dieser Last gehören auch die beim Beschleunigen
auftretenden dynamischen Anteile. Die gleichen sich beim Abbremsen
wieder aus. Nur wenn das Last-Drehmoment zu groß wird, "reißt" die
Feder. Der Motor verliert Schritte, kann dem Drehfeld nicht mehr folgen
und kommt aus dem Tritt.
Einzelne "verlorene" Schritte gibt es dynamisch eigenlich nicht. Das
sind dann in der Regel Fehler die durch EMV auf den Taktleitungen oder
Softwarefehler entstehen.
Mit freundlichen Grüßen
Thorsten Ostermann
Thorsten O. schrieb:> Hallo Harald,>> Harald E. schrieb:>> Carsten-Peter C. schrieb:>>> Schritte gehen eigentlich nur im Vollschritt und Halbschritt verloren.>>
Hallo,
stell Dir vor, der Motor steht und die folgende Mikroschritte bewegen
den Motor bedingt durch seine zu treibende Last nicht. Dann wird
irgendwann nach den folgenden Schritten die Kraft groß genug sei, um den
Motor auf seine Position zu „ziehen“. Er läuft wieder „richtig“ oder
schafft es gar nicht. Schafft er es beim Vollschritt nicht, ist der
Versatz da. Mein Plotter läuft im 1/8 Schritt am Besten. Meine SW habe
ich in Assembler für den ATmega 1284 geschrieben. Anfangsgeschwindigkeit
und Rampenlänge lassen sich in weiten Bereichen einstellen. Sicher ist
es nicht so einfach das Programm nachzuvollziehen, aber wenn es Dir
hilft kann ich es Dir gerne schicken.
Gruß Carsten
Hallo Carsten,
wen sprichst du hier an? Dein Zitat ist so unvollständig dass man nicht
erkennen kann wen du eigentlich meinst...
Ich glaube dir gerne, dass dein Programm funktioniert. Trotzdem ist das
was du beschreibst kein Schrittverlust, sondern der Lastwinkel. Der
Fehler wird ja beim weitersteppen oder beim Wegfall der Last wieder
ausgeglichen.
Mit freundlichen Grüßen
Thorsten Ostermann
Hallo Thorsten,
ich wollte eigentlich nur nett sein und Gerald M. mein Programm
anbieten. Die Idee war, über die serielle Schnittstelle kurz die
anzulaufende Position zu übermitteln. Also z.B. lauf mal zur Position 3
cm. Ob es passt, kann ich nicht beurteilen. Ich wollte niemanden
kritisieren.
Gruß Carsten
Hallo Carsten,
vielen Dank für dein Angebot. Ich habe allerdings meine Software schon
in c geschrieben und sie funktioniert auch. Vielleicht interessiert es
dennoch jemand anderes und du kannst ja trotzdem deinen Code anhängen :)
Oft sucht man ja etwas im Internet und ist froh wenn jemand etwas
hochgeladen hat, weil man genau das gesucht hat.
Liebe Grüße
Gerald
Carsten-Peter C. schrieb:> stell Dir vor, der Motor steht und die folgende Mikroschritte bewegen> den Motor bedingt durch seine zu treibende Last nicht. Dann wird> irgendwann nach den folgenden Schritten die Kraft groß genug sei, um den> Motor auf seine Position zu „ziehen“.
Nicht nur das, der Motor kann ja per Ansteuerung in einem Mikroschritt
gehalten werden und wenn er nachhinkt, ist auch das schoin ein Problem
für dynamische Positionierungen. Sowohl im Endzustand als auch auch dem
Weg dahin.
Ist wie ein Tiefpass, der zu träge ist.
Ja, das ist kein Schrittverlust, im eigentlichen Sinn, aber ein
Micostep-Verlust. Die Drehposition entspricht nicht der Sollposition.
Harald E. schrieb:> Die Drehposition entspricht nicht der Sollposition.
Die Drehposition entspricht fast nie der Sollposition. Die IST-Position
entspricht immer der Soll-Position mit der Auflösung eines Halbschritts
mit einer lastabhängigen Abweichung - auch bei Mikroschrittbetrieb.
Walter T. schrieb:> Die Drehposition entspricht fast nie der Sollposition.
Im Startfall praktisch schon :-)
Ausserdem regeln wir in der Tat die Drehposition = Sollposition. Die
Sollposition des Motorankerwinkels ist nur nicht gleich dem des Feldes!