Guten Tag liebe Community! Könnte mir bitte jemand mit folgender Aufgabe helfen?
Angehängte Dateien:
-

stm32_aufgabe.PNG
110 KB
Oleksandr S. schrieb: > Guten Tag liebe Community! Könnte mir bitte jemand mit folgender Aufgabe > helfen? Was hast du bis jetzt erzeugt?
while (1)
{
// Der ADC wird gestartet und misst den Wert auf adc1 (PIN A0)
HAL_ADC_Start(&hadc1); // adc1 auf pin PA0 == A0
HAL_ADC_PollForConversion(&hadc1, 10);
// Der Wert von adc1 (Poti) wird ausgelesen und in value gespeichert
value= HAL_ADC_GetValue(&hadc1);
}
Also ADC auslesen in einer Round Robin Struktur und in das Ergebnis in
value speichern habe ich bis jetzt geschaft. Das Problem bei mir ist
Ausgabe des Wandlungsergebnises auf Ports C0-C3.
Oleksandr S. schrieb: > Also ADC auslesen in einer Round Robin Struktur Du scheinst hier was zu verwechseln: - https://de.wikipedia.org/wiki/Endlosschleife - https://de.wikipedia.org/wiki/Round_Robin_(Informatik)
Port C0-C3sind nur 4 bits, der AD Wandler gibt 10 bit aus. Wie ist das gedacht ? Nur den 4 obere bits ausgeben ?
Aber wenn wir hier schon die Hausaufgaben von anderen machen, können doch wir alle etwas dabei lernen? Wie sinnvoll ist das Beispiel überhaupt?? Denke die meisten von uns hätten das jetzt über einen Timer-Interrupt, drei Bitmasken und einen free-running ADC gelöst, aber was hat das mit Round Robin zu tun?
Round-Robin scheduling structure sieht so aus:
– Ring structure consisting of endless loop
int main(){
initialize_components();
while(1){
if(periphery1 requires svc){ doSvc1();}
if(periphery2 requires svc){ doSvc2();}
…
if(peripheryN requires svc){ doSvcN();}
}
}
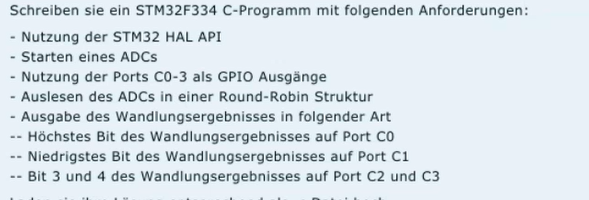
Hallo Jan, es ist so gedacht , dass man nur das höchste ,das niedrigste und Bits 3 und 4 auf entsprechenden Ports (C0-C3) ausgeben mus. Also nicht das gesamte Wandlungsergebnis. Und ich weiß nicht wie ich das realieseren soll. Has du vielleicht einen Lösungsvorschlag?
Moin, - die Zauberworte sind Bit-Manipulationen mit & und |, z.B. https://www.mikrocontroller.net/articles/Bitmanipulation#Standard_C_3 Ueberlege bitte, wie Du einzelne Bits Deines ADC-Wortes maskieren kannst. Diese Ueberlegungen mit AND, OR und XOR wirst Du immer brauchen. Ueberlege bitte was ist 0x1234 & 0x0001? Viele Gruesse Th. Oder: https://www.c-howto.de/tutorial/variablen/bitmanipulation/
Oleksandr S. schrieb: > Könnte mir bitte jemand mit folgender Aufgabe helfen? Ich hoffe das niemand jetzt einfach deine Hausaufgabe erledigt und das Ergebnis präsentiert. Die Beantwortung einzelner Fragen, wie das hier begonnen wurde, ist der richtige Weg.
Ich hoffe dass dir in deinem Leben auch keiner hilft. Wer bist du um überhaupt irgendwas hier zu sagen? Wenn du nichts angemessenes zu sagen hast, spar lieber deine Zeit.
Oleksandr S. schrieb: > Ich hoffe dass dir in deinem Leben auch keiner hilft. Wer bist du um > überhaupt irgendwas hier zu sagen? Wenn du nichts angemessenes zu sagen > hast, spar lieber deine Zeit. Willst du hilfe, oder was?
Oleksandr S. schrieb: > Wer bist du um überhaupt irgendwas hier zu sagen? Mit "Frechheit siegt" kommt man hier gut weiter (?).
Oleksandr S. schrieb: > Ich hoffe dass dir in deinem Leben auch keiner hilft. Wer bist du um > überhaupt irgendwas hier zu sagen? Wenn du nichts angemessenes zu sagen > hast, spar lieber deine Zeit. Interessant. Mit der Einstellung hast du definitiv keine Hilfe verdient. Auch nicht von einem Autor, der im Laufe von 25 Jahren zahlreiche Bücher und Tutorials von Anfang an kostenlos veröffentlicht hat. So viel zur Frage, wer ich eigentlich bin.
Oleksandr S. schrieb: > Ich hoffe dass dir in deinem Leben auch keiner hilft. Wer bist du um > überhaupt irgendwas hier zu sagen? Wenn du nichts angemessenes zu sagen > hast, spar lieber deine Zeit. Hier wird eher Hilfe zur Selbsthilfe gegeben. Und Hausaufgaben fuer andere zu loesen ist hier nicht gerne gesehen.
Moment mal, ich habe niemanden gebeten, meine Hausaufgaben für mich zu machen, ich hatte nur an einer Stelle dieser Aufgabe ein Problem (siehe 2. Kommentar). Warum ist es jetzt notwendig, wegen einer unauffälligen Person hier sinnlose Diskussionen zu veranstalten oder habt ihr heute nichts wichtigeres zu tun?
naja kleiner dann mach mal. ist immer gut, leute anzuscheissen und auf input zu warten.Hat sich bewährt
Oleksandr S. schrieb: > Moment mal, ich habe niemanden gebeten, meine Hausaufgaben für mich zu > machen Warum kritisierst du dann, dass ich ebenfalls darum gebeten habe, es nicht zu tun?
Ich dachte wir befinden uns im Forum wo gegenseitig geholfen wird ? Wie würdest du reagieren, wenn du eine Frage hast und dann komme ich und sage "Hey Leute , hilft ihm nicht" ? Du hast einfach die Kommentare nicht aufmerksam gelesen und hast dir gedacht, dass hier jemand meine Hausaufgaben für mich machen soll, aber das stimmt gar nicht. Ich hatte eine konkrete Frage, aber naja es ist schon dank dir vorbei.
Du soltest deine Lesekompetenz verbessern!
>"Hey Leute , hilft ihm nicht"
hat Stefan nicht gesagt, ehr so "Heft ihm bei den Teilschritten"
Hättest du Stefans Tutorial gelesen wüstest du wie mann Pins
setzt/löscht.
Aus den bisher gegebenen Informationen meiner Vorredner ist die Aufgabe
eingentlich lösbar.
Bitte deine Lösung hier posten.
Oder wo hast du noch Probleme?
Hier ist meine Lösung, allerdings weiß ich nicht ob die korrekt ist
1 | #include "main.h" |
2 | |
3 | ADC_HandleTypeDef hadc1; |
4 | |
5 | void SystemClock_Config(void); |
6 | static void MX_GPIO_Init(void); |
7 | static void MX_ADC1_Init(void); |
8 | |
9 | int main(void) |
10 | {
|
11 | /* USER CODE BEGIN 1 */
|
12 | int value = 0; |
13 | /* USER CODE END 1 */
|
14 | |
15 | HAL_Init(); |
16 | SystemClock_Config(); |
17 | MX_GPIO_Init(); |
18 | MX_USART2_UART_Init(); |
19 | MX_ADC1_Init(); |
20 | |
21 | while (1) |
22 | {
|
23 | |
24 | HAL_ADC_Start(&hadc1); // adc1 auf pin PA0 == A0 |
25 | HAL_ADC_PollForConversion(&hadc1, 10); |
26 | // Der Wert von adc1 (Poti) wird ausgelesen und in value gespeichert
|
27 | if (value & (1<<11)) { // höchstes Bit |
28 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); |
29 | |
30 | } else { |
31 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); |
32 | |
33 | }
|
34 | if (value & (1<<0)) { // niedrigstes Bit |
35 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); |
36 | |
37 | } else { |
38 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET); |
39 | |
40 | }
|
41 | if (value & (1<<3)) { // 3 Bit |
42 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_SET); |
43 | |
44 | } else { |
45 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_RESET); |
46 | |
47 | }
|
48 | if (value & (1<<4)) { // 4 Bit |
49 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET); |
50 | |
51 | } else { |
52 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET); |
53 | |
54 | }
|
55 | |
56 | }
|
57 | |
58 | }
|
59 | |
60 | /*Configure GPIO pin Output Level */
|
61 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, GPIO_PIN_RESET); |
62 | /*Configure GPIO pins : PC0 PC1 PC2 PC3 */
|
63 | GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3; |
64 | GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; |
65 | GPIO_InitStruct.Pull = GPIO_NOPULL; |
66 | GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; |
67 | HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); |
Moin, - MX_USART2_UART_Init()definiert und nicht benutzt und nicht benoetigt. Du sollst Port c benutzen? Wo kommen die Wert des ADC in (int)value? Gruesse Th.
Genau ich soll 4 Porte PC0 PC1 PC2 PC3 benutzen, die habe ich auch als GPIO Ausgänge definiert. Die "value" habe ich beim Kopieren tatsächlich vergessen. Jetzt habe ich korrigiert.
1 | #include "main.h" |
2 | ADC_HandleTypeDef hadc1; |
3 | void SystemClock_Config(void); |
4 | static void MX_GPIO_Init(void); |
5 | static void MX_ADC1_Init(void); |
6 | int main(void) |
7 | {
|
8 | /* USER CODE BEGIN 1 */
|
9 | int value = 0; |
10 | /* USER CODE END 1 */
|
11 | HAL_Init(); |
12 | SystemClock_Config(); |
13 | MX_GPIO_Init();; |
14 | MX_ADC1_Init(); |
15 | while (1) |
16 | {
|
17 | |
18 | HAL_ADC_Start(&hadc1); // adc1 auf pin PA0 == A0 |
19 | HAL_ADC_PollForConversion(&hadc1, 10); |
20 | value = HAL_ADC_GetValue(&hadc1); |
21 | // Der Wert von adc1 (Poti) wird ausgelesen und in value gespeichert
|
22 | if (value & (1<<11)) { // höchstes Bit |
23 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); |
24 | } else { |
25 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); |
26 | }
|
27 | if (value & (1<<0)) { // niedrigstes Bit |
28 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); |
29 | } else { |
30 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET); |
31 | }
|
32 | if (value & (1<<3)) { // 3 Bit |
33 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_SET); |
34 | } else { |
35 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_RESET); |
36 | }
|
37 | if (value & (1<<4)) { // 4 Bit |
38 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET); |
39 | } else { |
40 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET); |
41 | }
|
42 | }
|
43 | }
|
44 | /*Configure GPIO pin Output Level */
|
45 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, GPIO_PIN_RESET); |
46 | /*Configure GPIO pins : PC0 PC1 PC2 PC3 */
|
47 | GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3; |
48 | GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; |
49 | GPIO_InitStruct.Pull = GPIO_NOPULL; |
50 | GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; |
51 | HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); |
52 | |
53 | }
|
Moin, - Oleksandr S. schrieb: > vergessen. Jetzt habbe ich korrigiert. Nein.
1 | if (value & (1<<11)) { // höchstes Bit |
2 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); |
3 | } else { |
4 | HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); |
5 | }
|
Jetzt den Code in CubeIDE einkloeppern und compile. Gruesse Th.
>HAL_GPIO_WritePin(GPIOA,...
du nimmst immer noch Port A staat C.
Und round robin ist das auch noch nicht.
Also der Code wurde kompiliert ,keine Fehlermeldungen
Oleksandr S. schrieb: > Also der Code wurde kompiliert ,keine Fehlermeldungen Wenn Dir das reicht, die Daten werden trotzdem am flaschen Port ausgegeben. Habe noch nicht fertig...
Ah ja sehe ich, GPIOC muss ich nehmen. Danke dir. Warum ist das kein Round Robin?
1 | while (1) |
2 | {
|
3 | |
4 | |
5 | HAL_ADC_Start(&hadc1); // adc1 auf pin PA0 == A0 |
6 | HAL_ADC_PollForConversion(&hadc1, 10); |
7 | // Der Wert von adc1 (Poti) wird ausgelesen und in value gespeichert
|
8 | value = HAL_ADC_GetValue(&hadc1); |
9 | |
10 | |
11 | if (value & (1<<11)) { // höchstes Bit |
12 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0, GPIO_PIN_SET); |
13 | } else { |
14 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0, GPIO_PIN_RESET); |
15 | }
|
16 | if (value & (1<<0)) { // niedrigstes Bit |
17 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_1, GPIO_PIN_SET); |
18 | } else { |
19 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_1, GPIO_PIN_RESET); |
20 | }
|
21 | if (value & (1<<3)) { // 3 Bit |
22 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_2, GPIO_PIN_SET); |
23 | } else { |
24 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_2, GPIO_PIN_RESET); |
25 | }
|
26 | if (value & (1<<4)) { // 4 Bit |
27 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_3, GPIO_PIN_SET); |
28 | } else { |
29 | HAL_GPIO_WritePin(GPIOC, GPIO_PIN_3, GPIO_PIN_RESET); |
30 | }
|
31 | |
32 | }
|
Moin, - ich hatte es Copy & Paste fehler gehalten, aber was willst Du mit diesem Teil machen:
1 | > } |
2 | > if (value & (1<<4)) { // 4 Bit |
3 | > HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET); |
4 | > } else { |
5 | > HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET); |
6 | > } |
7 | > } |
8 | > } |
9 | > /*Configure GPIO pin Output Level */ |
10 | > HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, |
11 | > GPIO_PIN_RESET); |
12 | > /*Configure GPIO pins : PC0 PC1 PC2 PC3 */ |
13 | > GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3; |
14 | > GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; |
15 | > GPIO_InitStruct.Pull = GPIO_NOPULL; |
16 | > GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; |
17 | > HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); |
18 | >
|
19 | > } |
20 | >
|
also das Configure NACH dem while() das NIE ausgefuehrt wird. Gruesse Th.
Das sind die GPIO Einstellungen, die gehören zur MX_GPIO_Init Funktion so musste das aussehen:
1 | static void MX_GPIO_Init(void) { |
2 | /*Configure GPIO pin Output Level */
|
3 | > HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, |
4 | > GPIO_PIN_RESET); |
5 | > /*Configure GPIO pins : PC0 PC1 PC2 PC3 */ |
6 | > GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3; |
7 | > GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; |
8 | > GPIO_InitStruct.Pull = GPIO_NOPULL; |
9 | > GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; |
10 | > HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); |
11 | >
|
12 | > } |
> /*Configure GPIO pin Output Level */ > HAL_GPIO_WritePin(GPIOC, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3, > GPIO_PIN_RESET); > /*Configure GPIO pins : PC0 PC1 PC2 PC3 */ > GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3; > GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; > GPIO_InitStruct.Pull = GPIO_NOPULL; > GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; > HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); > > } ist doch eigentlich in der MX_GPIO_Init(void); und nicht nach der Endlosschleife.
Was ich bei der Aufgabenstellung nicht verstehe ist, was Round Robin da zu suchen hat. Das ist doch keine Aufgabe mit konkurrierenden Prozessen.
Guido K. schrieb: > Was ich bei der Aufgabenstellung nicht verstehe ist, was Round Robin da > zu suchen hat. Vielleicht wird die Round-Robin Struktur in einer Folge-Aufgabe benötigt.
Stefan ⛄ F. schrieb: > Vielleicht wird die Round-Robin Struktur in einer Folge-Aufgabe > benötigt. Ja, vielleicht schon, aber ich wüsste jetzt nicht mal wie man bei einem linearen Algorithmus, also Wert lesen, Wert ausgeben, irgendwie einen Round Robin einbauen könnte. Es gibt keinen konkurrierenden Prozess, der Ablauf ist synchron und nicht nebenläufig.
Vielleicht soll er auch nicht auf das Ergebnis warten, sondern den ADC nur triggern. Dann kann es passieren dass "jemand" zweites ein ADC Ergebnis haben möchte, noch bevor das Ergebnis der ersten Messung da ist. Es sollte also irgendwo ein FIFO geben welches die Anfrager verwaltet und eine Queue bildet. So würde ich das interpretieren (und ist im Gegensatz zu dem Teil mit den Pins auch Praxisrelevant, auch wenn es normal eher eine Schnittstelle wie SPI o.ä. trifft).
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.