
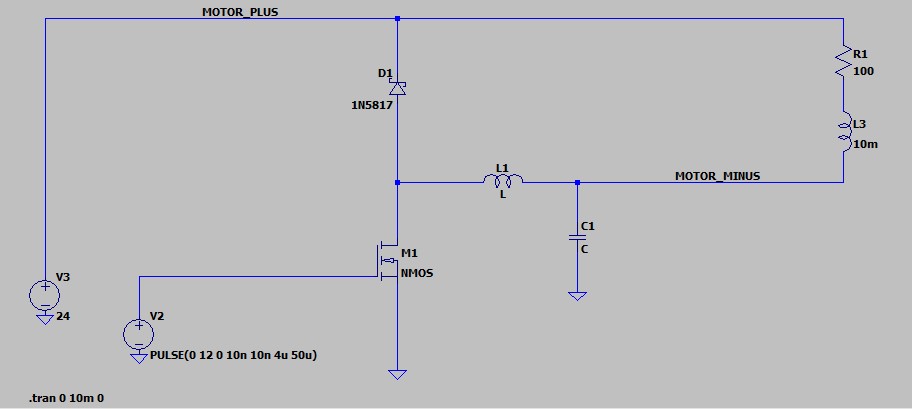
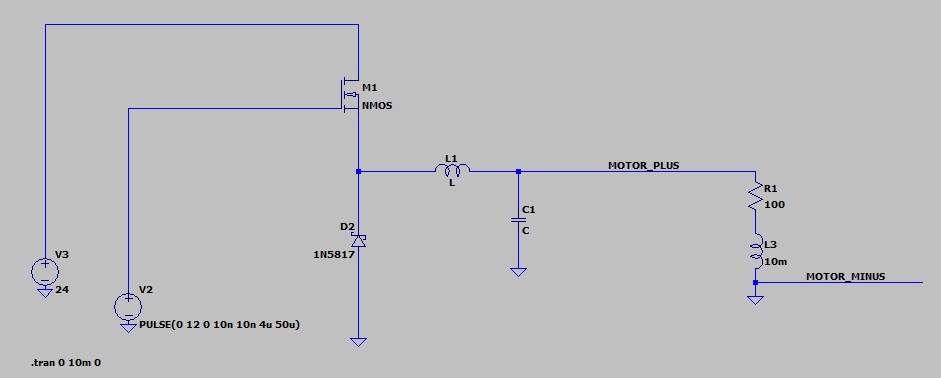

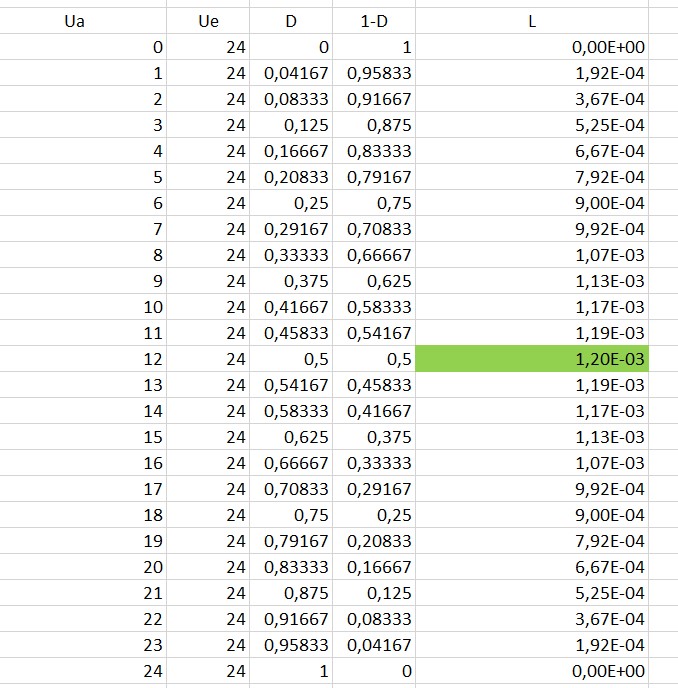
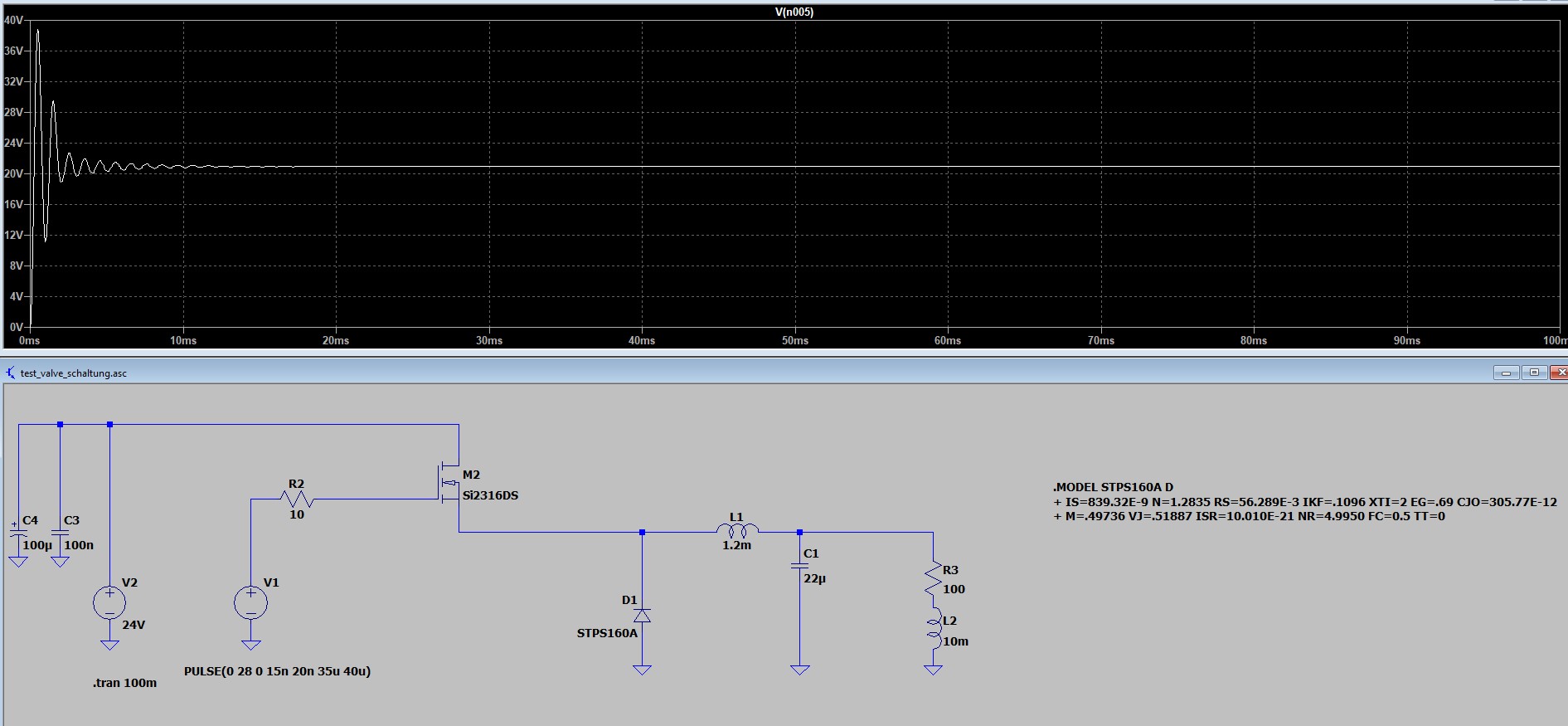
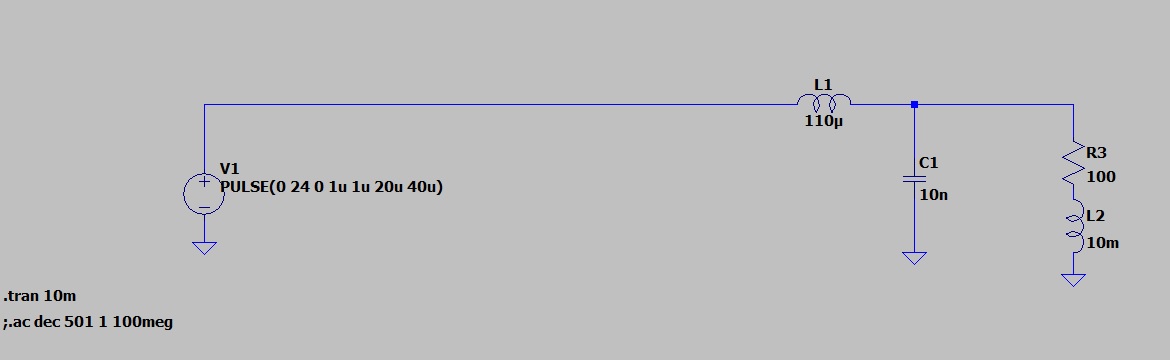
Hallo Im Grund geht es mir hierbei um die Auslegung eines LC Filters, das mir die Verluste gering hält. Also kommt ein RC-Tiefpass nicht in Frage. Ich soll eine induktive Last, zB einen Motor mittels einer PWM steuern. Die Schaltung wie sie im Moment vereinfach aussieht, zeigt das Bild "vereinfachte Schaltung". Im Prinzip ist nur der Motor an Plus geklemmt, Minus über dem Fet, also eine ganz normale PWM Steuerung. Nun möchte ich aber die PWM Frequenz 25kHz bis auf mindestens 600Hz filtern. Um dies zu erreichen, kann ja nicht einfach am Drain des M1, an dem das eigentliche PWM Signal zur Verfügung steht, ein LC-Filter angehängt werden, wie es im Bild "vereinfachte Schaltung Filter" zu sehen ist. Nun gut, was ich ja möchte ist eigentlich eine variable Ausgangsspannung mit Hilfe des veränderlichen Tastgrades der PWM. Nun könnte ich hergehen und den Mosfet entweder als P-FET auslegen oder den Motor und die LC Filterschaltung am Source des N-FETs anbringen. Beim letzteren entspräche das dann einem etwas missbrauchten Tiefsetzsteller (Bild "vereinfachte Schaltung Buck", weil ja eine variable Ausgangsspannung gefordert ist. Dann habe ich zwar etwas grösseren Aufwand mit der Ansteuerung des FETs, aber darum soll es erst einmal nicht gehen. Nun habe einen Buck-Converter versucht auszulegen. Was habe ich gemacht? Ich habe mir einmal überlegt, welche Werte für meine Anforderungen fest vorgegeben werden können und welche variabel sind. Zudem habe ich überlegt, dass d_IL von der Induktivität abhängt und C von d_IL und d_Ua (d für Delta). Wenn ich die Schaltung einmal auslege, können C und L ja nicht mehr verändern, also müssen diese später ebenfalls vorgegeben werden. Die Formeln für C und L sieht man im Bild "vereinfachte_Schaltung_LC_Werte". Um die genannten Werte L, C zu errechnen habe ich vorerst einmal d_IL und d_Ua fest vorgegeben und L berechnet (grün markiert im Excel) Ue_nom = 24V f = 25kHz Ia_max = 1A d_IL = 0,2A d_Ua = 50mV Ua = variabel Tastgrad = variabel Eigentlich sieht man es bereits an der Formel für L, aber ich habe es trotzdem einmal visualisiert (Bild "vereinfachte_Schaltung_Lmaxjpg"). Für die Berechnung von L_max habe ich einmal alle Ausgangsspannungswerte aufgelistet und geschaut, wann L am grössten wird. Man sieht, dass Lmax bei einem Tastgrad von 0.5 auftritt, denn dann ist ja der Ausdruck im Zähler maximal. So erhalte ich dann für L=1,2mH. Damit kann nun d_IL berechnet werden, womit wiederum C berechnet werden kann. Da nun C und L als konstant angenommen werden, ändert sich nun mit variablem Tastverhältnis und damit der Ausgangsspannung nur noch das d_IL und d_Ua. Die Werte habe ich so verwendet und fest vorgegeben und die Rechnung noch einmal mit diesen Werten und umgestellten Formeln berechnet. (orange im Tabellenblatt). neue Vorgaben: Ue_nom = 24V f = 25kHz Ia_max = 1A Tastgrad = variabel Ua = variabel L = 1,20mH C = 20uF Ich erhalte auf diese Weise akzeptable Werte gemäss Rechnung über den ganzen Bereich, aber mir scheint die Induktivität ein wenig zu gross geraten und der Preis ist auch nicht ganz so erschwinglich, denn diesen Filter sollen gleich mehrere Motoren erhalten. Ist das der Weg wie man so etwas macht und ist meine Vorgehensweise richtig gewesen? Ausserdem würde ich gerne wissen, wie und ob man das anfängliche Schwingen weg bekommt, wenn man zb 35us eingibt. Die Simulation und das Bild ist unter v_simulation zu finden. Ich wäre wirklich um Ratschläge sehr dankbar und hoffe, dass ich so eine Lösung finden kann.
Angehängte Dateien:
-

vereinfachte_Schaltung.jpg
22 KB -

vereinfachte_Schaltung_FIlter.jpg
27 KB -

vereinfachte_Schaltung_Buck.jpg
24 KB -

vereinfachte_Schaltung_LC_Werte.jpg
8,2 KB -

vereinfachte_Schaltung_Lmaxjpg.jpg
140 KB -

v_simulation.jpg
210 KB
Darf ich mal deinen Ansatz hinterfragen? Ein DC Motor läuft nämlich mit PWM viel besser an als mit geregelter Gleichspannung und lässt sich auch besser steuern, vor allem bei einer 2-Quadrantenlösung. Wenn deine Filter eher zur Vermeidung von EMI ist, dann reicht auch ein wesentlich kleiner Filter, denn dann möchtest du nur die Flanken der PWM etwas verrunden. Also erklär mal bitte, was das Filter soll.
Da ist es wieder. Das unsägliche, hässliche Wort (ich wage es kaum zu schreiben) ---> Tiefsetzsteller Oh weh, oh weh .... es lebe das Deutschtum und die Beamtenhochsprache.
Markus K. schrieb: > Nun gut, was ich ja möchte ist eigentlich eine variable Ausgangsspannung > mit Hilfe des veränderlichen Tastgrades der PWM Das geht so mit dem LC Filter, halt ungeregelt so lange du nur Tiefsetzsteller und keinen step down regulator simulierst. Ist der N-MOSFET an plus, muss halt die Gate-Ansteuerspannung über plus liegen, mit 28V statt 24V bekommt er wenigstens 4V UGS. Markus K. schrieb: > So erhalte ich dann für L=1,2mH. Na ja, es hängt davon ab, was du als Stromripple akzeptierst, in Prozent vom maximalen Laststrom. Oft erlaubt man 20% schwankenden Strom in den C, der muss in der Lage sein, diesen Strom auch als Stromripple zu vertragen (Datenblatt, auch Elkos haben Daten). Die Kapazität des C bestimmt sich dann durch den erlaubten Spannungsripple, oft 1% wobei Motoren das nicht so wichtig nehmen. Markus K. schrieb: > Ausserdem würde ich gerne wissen, wie und ob man das anfängliche > Schwingen weg bekommt Der Motor ist bei dir eine induktive Last, die bildet einen Schwingkreis, durch 10R gedämpft. Ersetze ihn gegen eine resistive, lass die 10mH also weg. Deine Buck-Induktivität sollte deutlich grösser sein als die Lastinduktivität.
Hallo Matthias Wie du es erraten hast, ist es zur Vermeidung von EMI. Ich dachte, dass man mit dem Erwähnen von "eine PWM filtern" automatisch mit EMI assoziiert. Nun ja, aber wie würdest du diesen Filter auslegen und vor allem stellt sich mir die Frage, wie du den Filter in die PWM-Ansteuerung integrierst.
MaWin schrieb: > Markus K. schrieb: >> Nun gut, was ich ja möchte ist eigentlich eine variable Ausgangsspannung >> mit Hilfe des veränderlichen Tastgrades der PWM > > Das geht so mit dem LC Filter, halt ungeregelt so lange du nur > Tiefsetzsteller und keinen step down regulator simulierst. Verstehe ich jetzt gerade nicht. Ein Tiefsetzsteller ist doch ein step down. Ich habe doch einen Tiefsetzsteller simuliert, darauf zielt ja eigentlich auvh mein Vorhaben mit der Berechnung. > > Ist der N-MOSFET an plus, muss halt die Gate-Ansteuerspannung über plus > liegen, mit 28V statt 24V bekommt er wenigstens 4V UGS. Das ist mir klar, deshalb sagte ich auch, dass es im Moment auch nicht darum gehen sollte. > > Markus K. schrieb: >> So erhalte ich dann für L=1,2mH. > > Na ja, es hängt davon ab, was du als Stromripple akzeptierst, in Prozent > vom maximalen Laststrom. Oft erlaubt man 20% schwankenden Strom in den > C, der muss in der Lage sein, diesen Strom auch als Stromripple zu > vertragen (Datenblatt, auch Elkos haben Daten). Das heisst also die Induktivität kann kleiner werden, 20% hatte ich auch anfangs angenommen um Lmax zu berechnen. > > Die Kapazität des C bestimmt sich dann durch den erlaubten > Spannungsripple, oft 1% wobei Motoren das nicht so wichtig nehmen. Der Spannungsrippel kann demnach auch grösser werden. Das dürfte ja auch für Ventile gelten, wenn Motoren das nicht übel nehmen. > > Markus K. schrieb: >> Ausserdem würde ich gerne wissen, wie und ob man das anfängliche >> Schwingen weg bekommt > > Der Motor ist bei dir eine induktive Last, die bildet einen > Schwingkreis, durch 10R gedämpft. Ersetze ihn gegen eine resistive, lass > die 10mH also weg. Wie kommst du denn auf 10R? > > Deine Buck-Induktivität sollte deutlich grösser sein als die > Lastinduktivität. Ich wollte eigentlich auf ein kleineres L hinaus. Wenn der Motor wirklich 10mH hat, muss ich gemäss deiner Aussage mit dem L vom Buck noch viel grösser werden. Was bedeutet hier deutlich grösser? Eine gute Nacht noch
Markus K. schrieb: > Wie du es erraten hast, ist es zur Vermeidung von EMI. Dann kannst du für den LC Tiefpass eine viel höhere Grenzfrequenz wählen. Es geht dann darum, das du oberhalb von 150kHz im sicheren Bereich bleibst und die Frequenz ist durch die Endstufen schon begrenzt. Bedenke, das der Löwenanteil sowieso in der Induktivität des Motors geschluckt wird (ist ja auch ein L) und der Rest durch leichte Verrundung des PWM Signals erreicht wird. In hartnäckigen Fällen kann man auch die Leitung zum Motor schirmen. Übrigens wollen wir hier ja kein Buckkonverter (Tiefsetzsteller) mit gesiebtem Ausgang. Wir wollen kräftige PWM, die nur im HF Bereich etwas gebändigt wird.
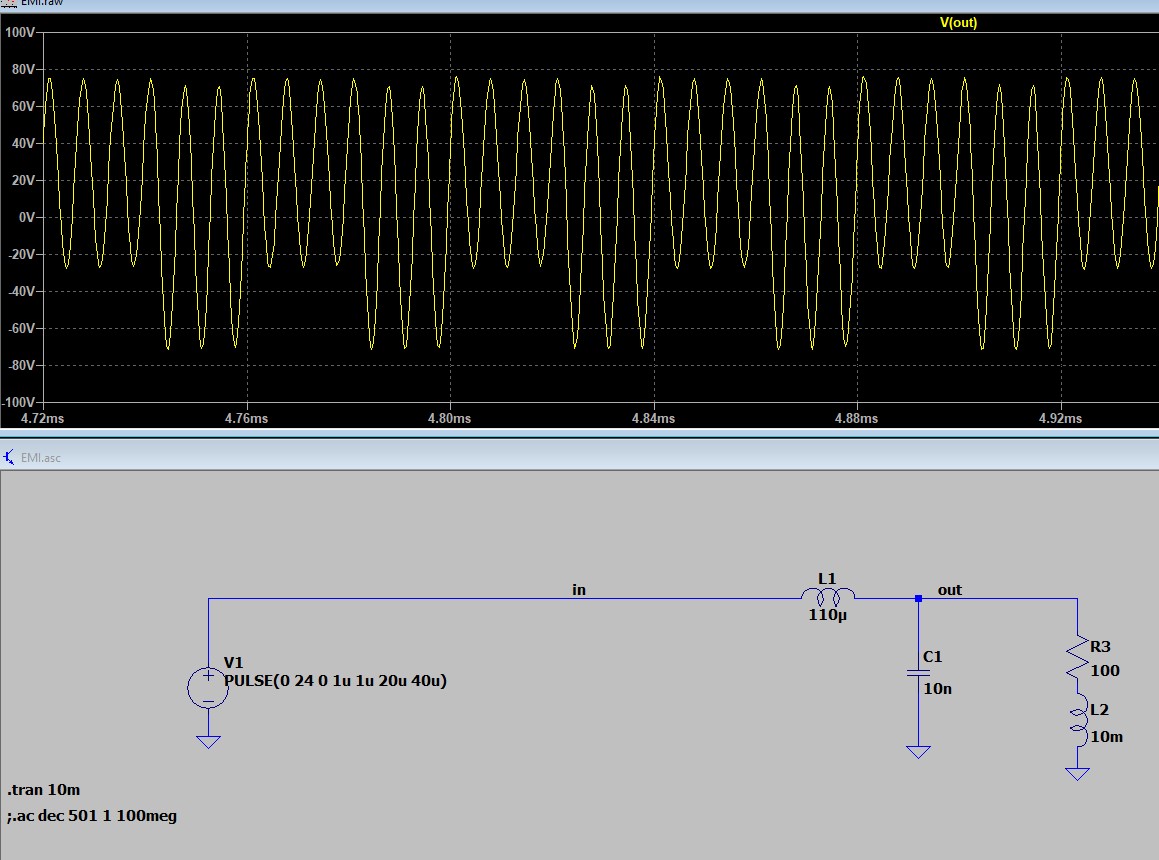
Matthias S. schrieb: > Markus K. schrieb: >> Wie du es erraten hast, ist es zur Vermeidung von EMI. > > Dann kannst du für den LC Tiefpass eine viel höhere Grenzfrequenz > wählen. Es geht dann darum, das du oberhalb von 150kHz im sicheren > Bereich bleibst und die Frequenz ist durch die Endstufen schon begrenzt. > Bedenke, das der Löwenanteil sowieso in der Induktivität des Motors > geschluckt wird (ist ja auch ein L) und der Rest durch leichte > Verrundung des PWM Signals erreicht wird. In hartnäckigen Fällen kann > man auch die Leitung zum Motor schirmen. > > Übrigens wollen wir hier ja kein Buckkonverter (Tiefsetzsteller) mit > gesiebtem Ausgang. Wir wollen kräftige PWM, die nur im HF Bereich etwas > gebändigt wird. Hallo Matthias Die EMV Messung erfolgt ja zwischen 150kHz und 30MHz. Die PWM wird mit 25kHz betrieben und das Signal erzeugt ja die Oberwellen. Ich habe mit L=480uH C=10uF Die Resonanzfrequenz auf ca. fg=2800Hz gelegt. Was bedeutet "viel höher"? Auf welche Dämpfung muss ich da bei der PWM Frequenz 25kHz ca. hinkommen? Wenn ich am Ausgang eine PWM mit abgerundeten Ecken erhalten möchte, müsste ich den Filter mindestens auf eine Grenzfrequenz von ca. 330kHz auslegen. Ich habe dazu die Simulation "höhere Grenzfrequenz" angehängt. Was ist nun besser, komme ich dem was du vorschlägst damit näher? Ich erhalte jedoch nur vernüftige Werte mit R1 und C2, ohne dieser Bauteile schwingt das mir zu sehr. Welche Werte sind nun brauchbar bzw. brauchbarer?
Markus K. schrieb: > Die Resonanzfrequenz auf ca. > fg=2800Hz gelegt. Was bedeutet "viel höher"? Na eben auf 150kHz. Hast du dir nämlich mal überlegt, wieviel Energie du in einem LC Tiefpass mit 10µF verbrätst? Aus eigener Erfahrung weiss ich, das der Kondensator das nicht lange mitmacht. Nein, du möchtest EMI oberhalb von 150kHz dämpfen und darauf legst du den Tiefpass aus. Wichtiger ist aber die Schirmung von Kabel und Motor.
Angehängte Dateien:
-

bild.jpg
29 KB -

bild2.jpg
170 KB -

Ueberschwingen.jpg
150 KB
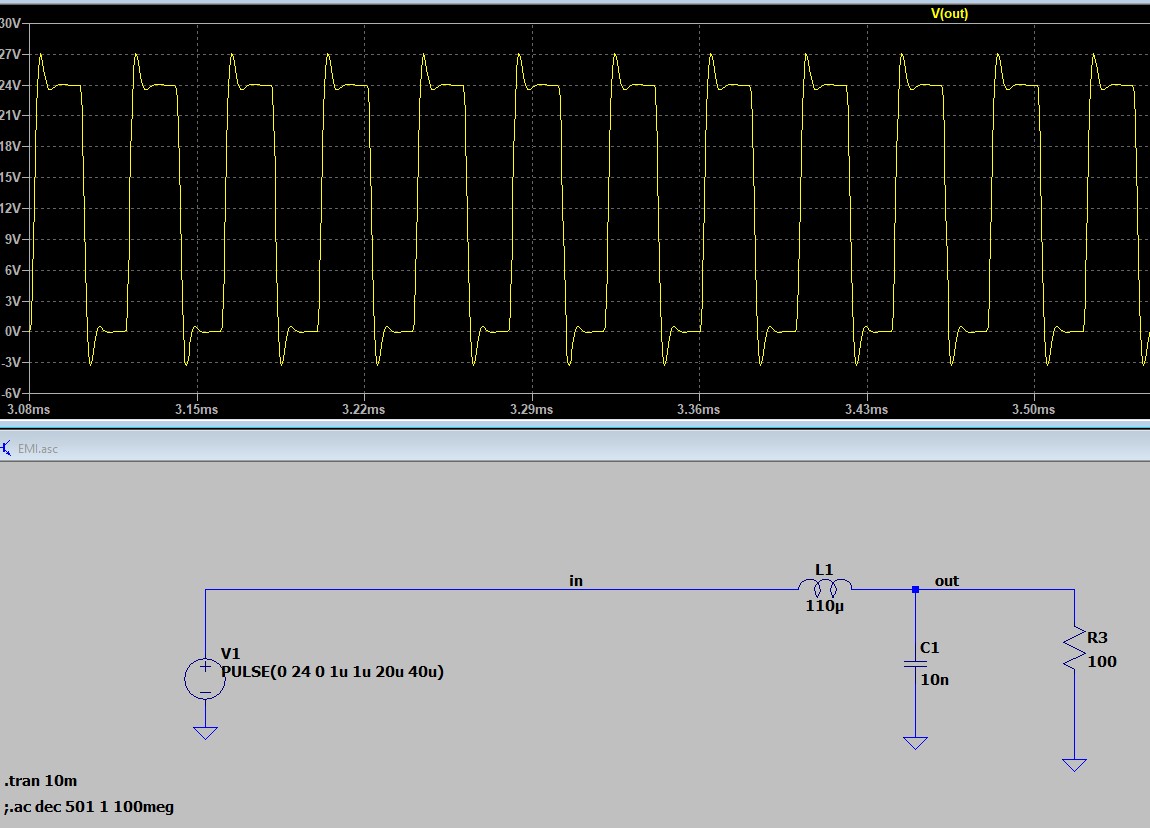
Matthias S. schrieb: > Markus K. schrieb: >> Die Resonanzfrequenz auf ca. >> fg=2800Hz gelegt. Was bedeutet "viel höher"? > > Na eben auf 150kHz. Hast du dir nämlich mal überlegt, wieviel Energie du > in einem LC Tiefpass mit 10µF verbrätst? Aus eigener Erfahrung weiss > ich, das der Kondensator das nicht lange mitmacht. Nein, du möchtest EMI > oberhalb von 150kHz dämpfen und darauf legst du den Tiefpass aus. > Wichtiger ist aber die Schirmung von Kabel und Motor. Hallo Matthias Ich habe die Grenzfrequenz auf 150kHz gelegt. Am Ausgang sehe ich so alles andere als eine PWM, sobald ich eine Induktive Last anhänge. Es wird auch nicht besser wenn ich die Induktivität des Motors/Ventils erhöhe. Es funktioniert so ja nicht über den ganzen Bereich, es schwingt unterschiedlich. Siehe Bilder. Ich wäre froh, wenn mir du oder jemand anders weiterhelfen und sagen könnte, was ich denn anders machen muss oder was ich nicht berücksichtige in der Schaltung. Oder im einfachsten Fall wie man das veschalten muss. Ich wäre auch mit einem Link wo ich das nachlesen kann schon zufrieden.
Den wichtigsten Teil, nämlich die Endstufe, hast du bisher ja nicht gepostet. Denn im Allgemeinen wird man eher mit der Ansteuerung der Endstufe dafür sorgen, das sie nicht zu steile Flanken erzeugt. Das hat auch den Vorteil, das man weder dicke Spulen noch Kondensatoren im Ausgang braucht. Bedenke, das die Induktivität der Last und der Kondensator davor einen schönen Parallelschwingkreis bilden, der die Effekte in Bild 2 erzeugt. Vermeide EMI in Leistungskreisen durch Schirmung und kluge Ansteuerung der Endstufe.
Sinnvolle Werte für den Motor wären auch nicht schlecht. Die Ansteuerung kann man durch eine Trapezform annähern. Hat auch einen Innenwiderstand
Matthias S. schrieb: > kluge Ansteuerung Das soll übrigens heißen: Schalte nur so steilflankig wie nötig. Deine Pulsquelle erzeugt ja hartes Rechteck. Eine echte Endstufe (Mosfet(s)) hingegen kannst Du natürlich über höheren Gate-Widerstand sanfter schalten lassen. Was dann noch übrig bleibt, dürfte ein weit geringeres Problem darstellen, in den harten Schaltflanken sitzt ein Großteil der EMI.
Angehängte Dateien:
-

bild.jpg
160 KB -

motor_bootstrap.jpg
180 KB
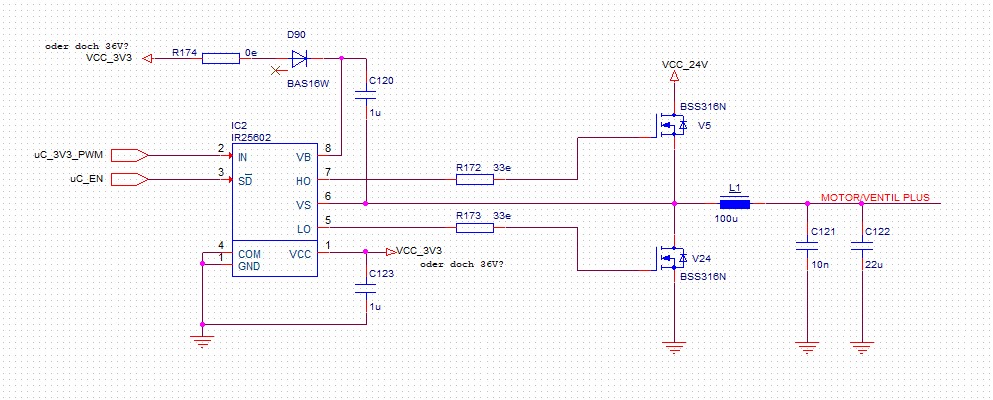
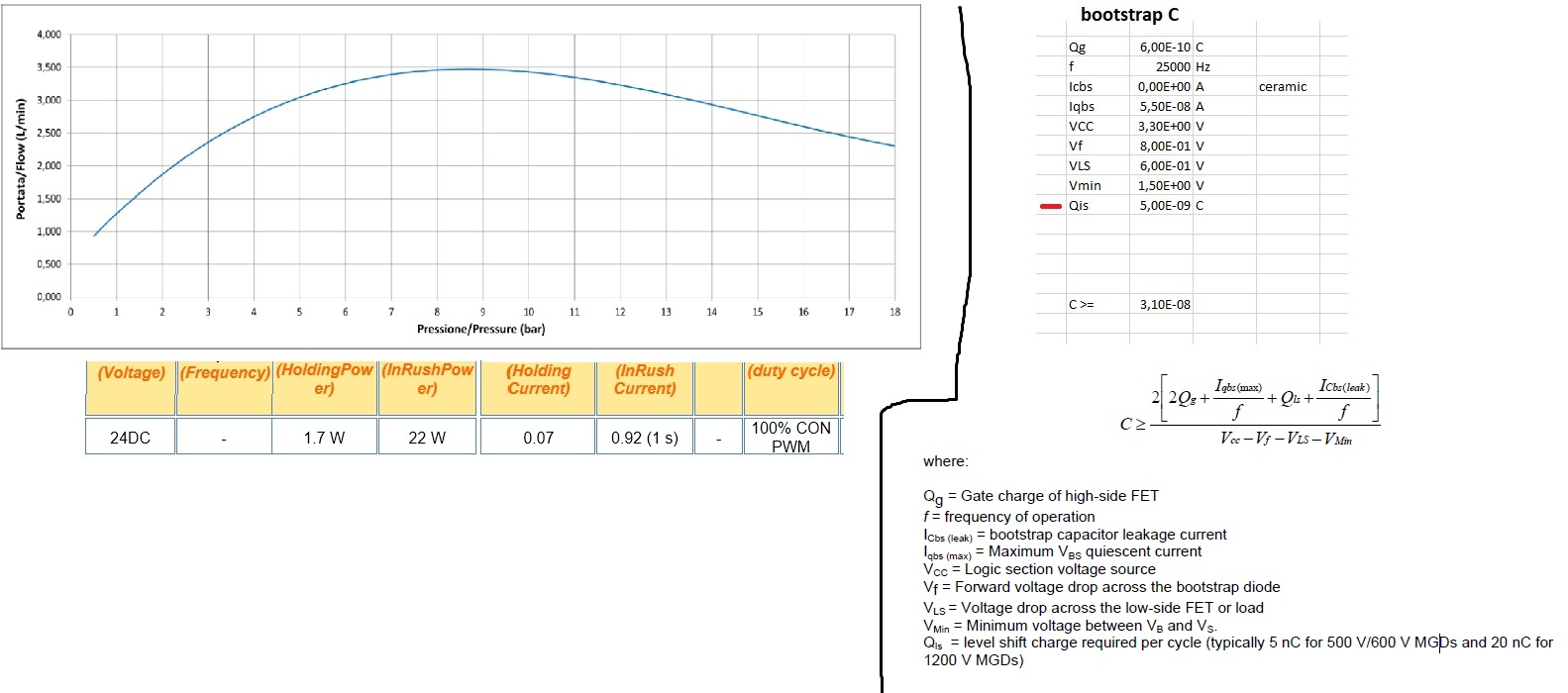
Frieder L. schrieb: > Matthias S. schrieb: > Eine echte Endstufe (Mosfet(s)) hingegen kannst Du natürlich über > höheren Gate-Widerstand sanfter schalten lassen. Danke, dir das würde ich jetzt auch so versuchen. Dazu hätte ich aber ein paar Fragen weiter unten. Abdul K. schrieb: > Sinnvolle Werte für den Motor wären auch nicht schlecht. Die Ansteuerung > kann man durch eine Trapezform annähern. Hat auch einen Innenwiderstand Die einzigen Motor oder Ventilwerte, die ich habe, sind so wie im Bild "motor&bootstrap" links angegeben. Mehr dazu habe ich auch nicht. Die richtige Werte kann ich nur herausfinden, wenn ich auch die Motoren da habe. Das kann aber noch dauern. Matthias S. schrieb: > Den wichtigsten Teil, nämlich die Endstufe, hast du bisher ja > nicht > gepostet. Denn im Allgemeinen wird man eher mit der Ansteuerung der > Endstufe dafür sorgen, das sie nicht zu steile Flanken erzeugt. Das hat > auch den Vorteil, das man weder dicke Spulen noch Kondensatoren im > Ausgang braucht. > Bedenke, das die Induktivität der Last und der Kondensator davor einen > schönen Parallelschwingkreis bilden, der die Effekte in Bild 2 erzeugt. > > Vermeide EMI in Leistungskreisen durch Schirmung und kluge Ansteuerung > der Endstufe. Die Schaltung ist im Bild "bild" zu sehen. Zur Beschaltung des ICs ist im Datenblatt nichts angegeben. Deshalb habe ich versucht zB den Bootstrap Kondensator auszulegen gemäss Application Note AN-978: https://www.infineon.com/dgdl/Infineon-HV_Floating_MOS_Gate_Drivers-ApplicationNotes-v01_00-EN.pdf?fileId=5546d4626c1f3dc3016c47de609d140a&redirId=114085 Seite 6 oder im Bild "motor&bootstrap" rechts. Da erhalte ich einen Kondensator von ca. 31nF, das erscheint mir deutlich zu wenig. Da ich sowieso grösser sein muss als dieser Wert, habe ich 1u angehängt, denn die müssen ja sowieso immer etwas grösser ausfallen. Bezüglich der Gatewiderstände konnte ich auch nichts dazu finden wie gross die sein müssen. Das ist irgendwie gar nicht beschrieben bzw. weiss ich nicht was für Spannungen an VHO und VLO ausgegeben werden. Dann könnte man es ja noch rechnen. Die Angaben im Datenblatt verstehe ich nicht so wirklich. VS ist ja bei mir maximal 24V, VB sollte dann minimum VS+10 also 34V sein (recommended operation). Also muss VCC VS+10+Vf sein oder wie ist das? Wenn das so ist, was bringt mir dann das IC mit der Bootstrap Schaltung überhaupt? Könnte mir da jemand weiterhelfen?
Markus K. schrieb: > Bezüglich der Gatewiderstände konnte ich auch nichts dazu finden wie > gross die sein müssen. Das ist irgendwie gar nicht beschrieben bzw. > weiss ich nicht was für Spannungen an VHO und VLO ausgegeben werden. > Dann könnte man es ja noch rechnen. > Die Angaben im Datenblatt verstehe ich nicht so wirklich. > VS ist ja bei mir maximal 24V, VB sollte dann minimum VS+10 also 34V > sein (recommended operation). Also muss VCC VS+10+Vf sein oder wie ist > das? Wenn das so ist, was bringt mir dann das IC mit der Bootstrap > Schaltung überhaupt? > Edit: Gemäss Datenblatt sollte VHO und VLO 0.1V sein, mit 100Ohm erhalte ich 1mA und mit einem Qg von 0.6nC erhalte ich eine rise und fall Zeit von 600ns. Das sollte so passen.
Was aber nicht passt, sind nur 3,3V Gatespannung, die durch die Diode auf der Highside nochmal weniger wird (die Ladungspumpe wird über die Diode gefüttert). Wenn du die BSS316 durchsteuern willst, sollten da wenigstens 5V gespeist werden. Bei 3,3V musst du LLL MosFets verwenden.
deudschleera schrieb: > Das unsägliche, hässliche Wort (ich wage es kaum zu schreiben) > > ---> Tiefsetzsteller Mich erinnert das immer an "Viertopfzerknalltreibling"
Matthias S. schrieb: > Was aber nicht passt, sind nur 3,3V Gatespannung, die durch die > Diode > auf der Highside nochmal weniger wird (die Ladungspumpe wird über die > Diode gefüttert). > Wenn du die BSS316 durchsteuern willst, sollten da wenigstens 5V > gespeist werden. Bei 3,3V musst du LLL MosFets verwenden. Hallo Matthias Ich speise jetzt den Chip mit 5V VCC. Der FET FDS6690A hat 3V maximal Thresholdspannung. Ich denke nicht, dass zwar 150mA durch die Diode fliessen werden, aber wenn ich davon ausgehe und mit der Diodenvorwärtsspannung von 1.25V rechne, sollte das mit 3V Thresholdspannung + Vf 1.25V = 4.25V noch gut funktionieren. Oder gibt es noch andere Faktoren, die zu berücksichtigen wären?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.