Hallo, ich möchte 4 Digitaleingänge an der Controller-Einheit meines DC Motors mit meinem Microcontroller (ein NI-USB 6008 Gerät) steuern. Die Digitaleingänge können einen SPS-Pegel auslesen. Ein High-Signal liegt bei 15-30V und ein Low liegt bei unter 5V. Jeder Digitaleingang des Motors hat eine Eingangsimpedanz von 5k4 Ohm. Das NI-USB 6008 kann jedoch als High-Signal max. +5V bei ca -0,6mA (oder +3,3V bei max. -8,5mA) pro Digitalausgang erzeugen. Ich habe ein 24V Netzteil, was ich für die Ansteuerung verwenden möchte. D.h. ich würde einen Optokoppler oder einen Bipolartransistor verwenden um mittels der +5V des Microcontrolles mein Digitaleingang des Motors an der 24V Spannung anzulegen bzw. von der 24V zu trennen (entsprechend High und Low). Mit 24V am Digitaleingang meines Motors und der Eingangsimpedanz von 5k4 Ohm, würde ich dann ca. 4,4mA brauchen. Das würde bedeuten, dass ich einen Optokoppler bzw. Bipolartransistor brauche, welcher 1-8mA als Vorwärtsstrom aufnehmen kann und gleichzeitig etwa 4,4mA am Ausgang durschalten kann. Der BC 557B scheint für mich eine geeignete Wahl zu sein, jedoch wollte ich nachfragen ob das so auch korrekt ist? Oder ob vielleicht ein anderes Bauteil mehr geeignet dafür ist? Link für den BC 557B: https://www.reichelt.de/bipolartransistor-pnp-45v-0-1a-0-5w-to-92-bc-557b-p35845.html
Nimm einen Optokoppler mit Darlington-Ausgang. Der 4N32 wäre ein geeigneter Klassiker.
Amr E. schrieb: > Der BC 557B scheint für mich eine geeignete Wahl zu sein, jedoch wollte > ich nachfragen ob das so auch korrekt ist? Der ist OK, reicht aber allein nicht. Du brauchst einen Pegelwandler. Das kann man hier auch mit dem passenden Optokoppler allein machen. Nimm einen mit Darlingtonausgang. Der Optokoppler schaltet dann einfach die +24V an deine Steuereingänge. Einen Pull-Down Widerstand braucht man hier nicht, den hat deine Motorsteuerung schon eingebaut.
Amr E. schrieb: > Der BC 557B scheint für mich eine geeignete Wahl zu sein, jedoch wollte > ich nachfragen ob das so auch korrekt ist? Nimm den und verschalte ihn richtig. In etwa so wie im Beitrag "Re: +12V mit +3.3V schalten P-MOSFET?" Nur kannst du statt der 470 Ohm Widerstände welche mit 4,7kOhm nehmen. > Oder ob vielleicht ein anderes Bauteil mehr geeignet dafür ist? Das ist uninteressant, höchstens, du willst die Aufgabe "bestmöglich" lösen. Dann musst du aber noch definieren, was "das Beste" ist: möglichst klein, möglichst schnell, möglichst billig...
PNP+NPN Kombination (Pegelwandler) ist in http://stefanfrings.de/mikrocontroller_buch/Einstieg%20in%20die%20Elektronik%20mit%20Mikrocontrollern%20-%20Band%202.pdf Kapitel 3.4.3.1 beschrieben. Am besten die Kapitel 2.2 und 3.4 ganz lesen, um die Zusammenhänge zu verstehen.
Egal wie du es drehst, wirst du am am Ende pro Ausgang eine Treiberstufe mit einem NPN-Transistor und Basis/Kollektorwiderstand brauchen (z.B BC547), um entweder die Diode des Optokopplers zu treiben oder die Pegelanpassung / Invertierung für den PNP- Transistor hinzukriegen. An dieser Stelle ist die Idee mit dem Optokoppler nicht verkehrt, dann minimierst du das Risiko eines Defekts, wenn sich die 24 Volt mal "verirren", und du brauchst keine gemeinsame Masse. Den "Sendekreis" baust du mit vorhandenen 5/3,3 Volt auf, auf 24-V-Ebene einfach den Optokoppler von 24V zum Eingang schalten. Ich würde zusätzlich noch eine "Angstdiode" (z.B. 1N4004) in Reihe zum Optokoppler schalten, damit kein Strom von deinem Motormodul "zurückfließt" bzw. der Fototransistor keine Rückwärtsspannung kriegen kann.
Amr E. schrieb: > ich möchte 4 Digitaleingänge an der Controller-Einheit meines DC Motors Sind diese Eingänge der geheimen Controller-Einheit potentialfrei? Oder liegt alles zusammen auf der selben Masse des besagten 24V Netzteils? > Das NI-USB 6008 kann jedoch als High-Signal max. +5V bei ca -0,6mA > (oder +3,3V bei max. -8,5mA) pro Digitalausgang erzeugen. Wenn ich das Manual zu dem Ding ansehe, dann steht dort "open collector" und im Text dann das:
1 | Per Voreinstellung sind die Digitalanschlüsse des NI USB-6008 mit einem |
2 | Bipolartransistor mit freiem Kollektor-Ausgang ausgestattet, der mit Hilfe des 4,7-kΩ-Pull-Up-Widerstands des Geräts mit 5 V betrieben werden kann. Durch Zuschalten eines Pull-Up-Widerstands an den Anschluss (vgl. Abbildung) können Sie den maximalen Quellstrom auf 8,5 mA pro Leitung erhöhen. |
Insgesamt sieht mir das nach einem wilden Gefrickel aus.
Lothar M. schrieb: > Amr E. schrieb: >> ich möchte 4 Digitaleingänge an der Controller-Einheit meines DC Motors > Sind diese Eingänge der geheimen Controller-Einheit potentialfrei? Oder > liegt alles zusammen auf der selben Masse des besagten 24V Netzteils? > >> Das NI-USB 6008 kann jedoch als High-Signal max. +5V bei ca -0,6mA >> (oder +3,3V bei max. -8,5mA) pro Digitalausgang erzeugen. > Wenn ich das Manual zu dem Ding ansehe, dann steht dort "open collector" > und im Text dann das:Per Voreinstellung sind die Digitalanschlüsse des > NI USB-6008 mit einem > Bipolartransistor mit freiem Kollektor-Ausgang ausgestattet, der mit > Hilfe des 4,7-kΩ-Pull-Up-Widerstands des Geräts mit 5 V betrieben werden > kann. Durch Zuschalten eines Pull-Up-Widerstands an den Anschluss (vgl. > Abbildung) können Sie den maximalen Quellstrom auf 8,5 mA pro Leitung > erhöhen. > Insgesamt sieht mir das nach einem wilden Gefrickel aus. Alle Digitaleingänge am Motor liegen an der selben Masse des 24V Netzteils. Hier vielleicht ein Link, wo die "Digital Logic Levels" des Geräts genauer aufgelistet sind: https://www.ni.com/pdf/manuals/375295c.pdf
Schon über einen Gatetreiber nachgedacht? Könnte die kompakteste Lösung sein.
Angehängte Dateien:
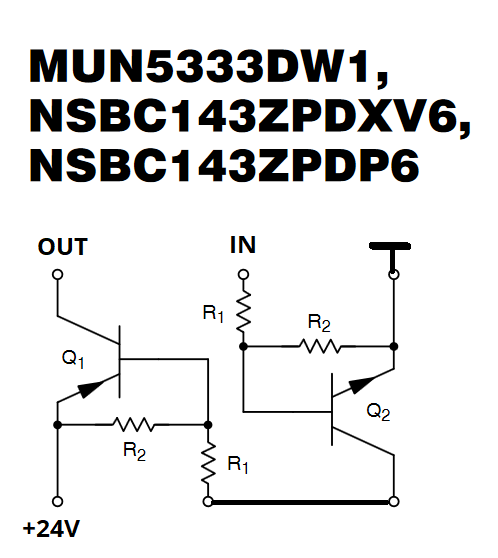
Für jeden Kanal einen npn/pnp digital transistor nehmen, wenns nicht entkoppelt sein braucht. Beispiel https://www.onsemi.com/pdf/datasheet/dtc143zp-d.pdf
Warum brauche ich den extra NPN-Transistor eigentlich? Und falls ich es entkoppeln möchte, würde da der 4N32 ausreichen? Oder wird der zu träge sein? Meine Eingangsdynamik am Motor beträgt <=0,1ms.
Amr E. schrieb: > Warum brauche ich den extra NPN-Transistor eigentlich? Das habe ich in dem PDF in Kapitel 2.2 erklärt. Ergibt sich auf den Grundlagen der Funktionsweise der Transistoren. Der PNP Transistor schaltet ein, wenn in seine Basis Strom fließt. Das passiert bei einer Eingangspannung von 0 bis 23,3 Volt (weil sein Emitter an 24V hängt). Deine Steuerung liefert 0 bis 5V, ergo: Der Transistor wäre immer eingeschaltet. Er kann nicht aus schalten. Mit zwei Transistoren geht das aber.
Amr E. schrieb: > Warum brauche ich den extra NPN-Transistor eigentlich? Weil er sonnst nicht sauber schaltet. Die Basisspannung beim PNP wäre dauernd zu hoch, oder müsste mit einem Widerstandsteiler künstlich auf 0 gesetzt werden. Das wäre dann Unsauber und dauernd Leitend. Logic 5V = auf Basis von PNP dauernd Off=19V oder On =24V ohne Widerstandsteiler. Also wäre er dauernd Leitend. Sorry Stefan waren wohl gleichzeitig LOL
Alles klar, habe ich verstanden. Der PNP Transistor schaltet durch wenn ein Low-Pegel vom Microcontroller ausgegeben wird und würde daher die ganze Zeit durchschalten. Danke für die Antworten. Kann ich auch, anstatt den npn Transistor, den vorher genannten Darlington-Optokoppler verwenden?
Amr E. schrieb: > Kann ich auch, anstatt den npn Transistor, den vorher genannten > Darlington-Optokoppler verwenden? Dazu Ja Und zu Oben: Bei nur PNP wäre das Signal wenn überhaupt auch noch Invertiert......
Amr E. schrieb: > Alles klar, habe ich verstanden. Der PNP Transistor schaltet durch wenn > ein Low-Pegel vom Microcontroller ausgegeben wird und würde daher die > ganze Zeit durchschalten. Danke Deine Beschreibung geht am Knackpunkt vorbei. Wenn der Mikrocontroller einen HIGH Pegel (5V) ausgibt, würde der Transistor immer noch ein schalten. Das ist der Knackpunkt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.