Hallo, bin das erste Mal dabei einen Schrittmotor anzusteuern, leider ruckelt der Motor. Die Paare von den 4 Drähten vom Motor habe ich gefunden. am Treiber habe ich die Stromgrenze auf 0,75V eingestellt. Habe anstatt eines 100µF einen 220µF Kondensator verbaut, daran kann es aber nicht liegen oder? Benutzte Teile: DRV8825 Treiber Stepper Motor Nennstrom (einphasig):1.5 A DC (https://www.ebay.de/itm/284026944636) Arduino UNO Labor-Netzteil (Ausgang 12V 3A) Aufbau: https://starthardware.org/stepper-motor-mit-dem-drv8825-steuern/
Marvin schrieb: > Aufbau Na ja, Aufbau auf einem Steckbrett ist für 2x1.5A nicht zielführend. Löte es zusammen, den Elko kurz an den Treiber. Wenn der Motor nur vibriert und nie dreht: vertausche mal die beiden Leitungen zu einer Spule. Ansonsten: je, Schrittmotore drehen oft nicht sauber sondern bleiben bei bestimmten Frequenzen hängen. Es hilft dann oft, die Welle etwas zu bremsen (Finger dranhalten). Auch gehen Treiber kaputt, wenn man beim Motor mal an der Achse dreht, oder sie eine grössere Last bremsen müssen und der Elko zu klein ist. Mit 42Ncm ist dein Motor aber eh lein Kraftprotz.
versuche es meist in Vollschritten, auch langsames anfahren. ruckelt= keine flüssige Bewegung als ob schritte übersprungen werden oder er sogar mal einen Schritt zurück macht wenn ich einen neuen Sketch auf dem UNO lade sollte der Motor während des Hochladens doch stehen bleiben? Bei mir zuckt er dann vor und zurück. Der Motor zieht auch nie mehr als 0,550A laut des Netzteils
Marvin schrieb: > bin das erste Mal dabei einen Schrittmotor anzusteuern, leider ruckelt > der Motor. Schrittmotore starten nicht aus dem Stand, wenn die Schrittgeschwindigkeit grösser ist als die Anlauffrequenz. Das müsste man im Datenblatt pfüfen, hängt auch vom Strom und seiner Kurvenform ab. Marvin schrieb: > Die Paare von den 4 Drähten vom Motor habe ich gefunden. Das klingt eher nicht nach Datenblatt. Mit weder Daten noch Erfahrung könnte es schwierig werden. Georg
Ist enable und dir richtig angeschlossen? GND mit dem Arduino verbunden? Also der Logik GND? Oder das 12 V Netzteil taugt nicht dafür, ist noch etwas anderes vorhanden?
MaWin schrieb: > Na ja, Aufbau auf einem Steckbrett ist für 2x1.5A nicht zielführend. Ja das geht sehr leicht schief. Vielleicht sogar. Dann noch ein mickriger Elko für 1.5 Ampere Motorstrom. Das reicht sicher nicht. Dann noch die elektrische Verkopplung -> Massetröme die auf den Arduino wirken. Da muss man sich gut überlegen wo was angeschlossen werden muss. Stichwort: getrennte Netzteile und Sternverbindung.
Dir und Step sind richtig angeschlossen, Enable ist wie in der Anleitung nicht angeschlossen. Anderes Netzteil ausprobiert gleicher verhalten. Video des Motors: https://files.fm/f/qwmf8neqs Die ersten 2Sekunden wir der Sketch hochgeladen
Marvin schrieb: > Dir und Step sind richtig angeschlossen, Enable ist wie in der Anleitung > nicht angeschlossen. > Anderes Netzteil ausprobiert gleicher verhalten. > > Video des Motors: > https://files.fm/f/qwmf8neqs > Die ersten 2Sekunden wir der Sketch hochgeladen Sieht für mich nach falscher Ansteuerung aus. Nen Oszi könnte bei sowas recht praktisch sein ;)
Marvin schrieb: > Video des Motors Der dreht doch. Klar, er bleibt an manchen Stellen in Eigenresonanz stehen, er hat ja weder eine dämpfende Last noch eine Bremsresonatorplatte. Das ist halt der Trick, damit umgehen zu können. https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
Foto vom Aufbau (Anschluss Motor / Treiber erkennbar), Foto vom Typenschild des Motors. Dreht der Sketch absichtlich links / rechts, oder passiert das zufällig?
Bild vom Aufbau? Das Zittern beim Download sieht für mich nicht normal aus, keine aber das Verhalten vom Uno da nicht. Wenn der Pegel da ruhig ist, dann wäre es eine fehlende/schlechte Verbindung zum Logik GND. Den Step kann man ja auch mit einem Taster auslösen. Das kann zwar durch Prellen auch unregelmässig sein, darf aber nur in eine Richtung drehen.
Da streuen in die steuersignale einige sachen ein. Wie ist die stromversorgung des Prozessors und die Masseverbindung gelöst? Kann es sein, dass eine masseverbindung für die steuersignale fehlt?
Woher bezieht der Schrittmotor den Strom. ? Ich hatte das Problem auch mal. Habe vergessen GROUND (Masse) richtig anzuschließen, passiert wenn der Motor mit Externen Strom versorgt wird. Und der Controller (Arduino) mit USB-Strom arbeitet. ;)
Angehängte Dateien:

Wenn der Steppermotor richtig rund laufen soll, dann nimm das: https://b-kainka.de/bastel10.htm
1 | #include <AccelStepper.h> |
2 | #define dirPin 2
|
3 | #define stepPin 3
|
4 | #define motorInterfaceType 1
|
5 | AccelStepper stepper = AccelStepper(motorInterfaceType, stepPin, dirPin); |
6 | void setup() { |
7 | stepper.setMaxSpeed(200); |
8 | stepper.setAcceleration(100); |
9 | stepper.moveTo(800); |
10 | }
|
11 | void loop() { |
12 | if (stepper.distanceToGo() == 0) |
13 | stepper.moveTo(-stepper.currentPosition()); |
14 | stepper.run(); |
15 | }
|
Der uno bekommt Strom von Pc über usb gemeinsamer GND UNO und Motor vorhanden
habe es noch mit einer Node MCU probiert und auch ohne SteckBrett alles über JumperKabel aber immer noch das selbe verhalten des Motors. gemeinsame Masse ist auch vorhanden habe sie mal abgezogen und das ruckeln wird schlimmer.
Marvin schrieb: > am Treiber habe ich die Stromgrenze auf 0,75V eingestellt. Eine Stromgrenze in Volt, was soll das sein?
Marvin schrieb: > ohne SteckBrett alles über JumperKabel Die allermeisten Jumperkabel eignen sich nicht für Stromstärken > 50mA weil sie aus Eisen und/oder Aluminium bestehen. Außerdem sind die Kontakte oft labberig. > gemeinsame Masse ist auch vorhanden habe sie mal abgezogen Ganz großes Fail. GND muss immer fest verbunden sein. Kann gut sein, dass jede weitere Arbeit mit diesen Modulen nun reine Zeitverschwendung ist, weil sie nun teilweise kaputt sind. Nur wer wirklich weiß was er da tut, darf GND unter ganz bestimmten Voraussetzungen unterbrechen.
Ja exakt so wie in der Beschreibung Verdrahtet anderen Treiber ausprobiert und Vmot + GND mit dickeren Kabel betrieben Problem bleibt weiterhin bestehen. (wenn die JumperKabel zu dünn wären müssten die sich dann nicht erwärmen? was sie nicht tuen)
Marvin schrieb: > wenn die JumperKabel zu dünn wären > müssten die sich dann nicht erwärmen? Nicht raten, messen. Der Widerstand ist leicht messbar, der Spannungsabfall ist U = R · I
wird das Treiber IC heiß? Ein Strom >1 A ist schon viel und die kleinen Dinger brauchen einen Kühlkörper. Wenn die zu heiß werden, dann schalten die ab. Und Motorstrom fließt auch wenn der Motor nicht dreht.
Marvin schrieb: > JumperKabel mal einen Magneten ranhalten, meine sind aus Eisen nicht aus Kupfer, schlechtere Leiter sind nur Glasfaser!
Wenn du auf einer Masseleitung 1V Spannungsabfall hast (und sei es nur ganz kurz), fällt die Kommunikation aus. Außerdem werden damit unter Umständen die ESD Schutzdioden in den IC's überlastet, so dass ihr Schutz dauerhaft weg fällt. Das IC kann danach durch eine simple Berührung mit dem Finger schon zerstört werden.
Marvin schrieb: > stepper.setMaxSpeed(200) > stepper.setAcceleration(100); Ist eigentlich recht human. Aber der Stepper verliert Schritte und wenn der erst of sync ist, fängt er sich ggf nicht mehr. Auf was steht M0, M1, M2 am DRV8825? Sleep und reset liegen auf High? Wolfgang schrieb: > Eine Stromgrenze in Volt, was soll das sein? V * 2 = A, laut dem Link den Marvin geteilt hat. Also 1,5A @Marvin Wo bleiben die Bilder vom Aufbau?
Angehängte Dateien:
-

Ardoinoschritt.png
160 KB -

1642101220282.jpg
210 KB


Hier das Bild und eine Zeichnung
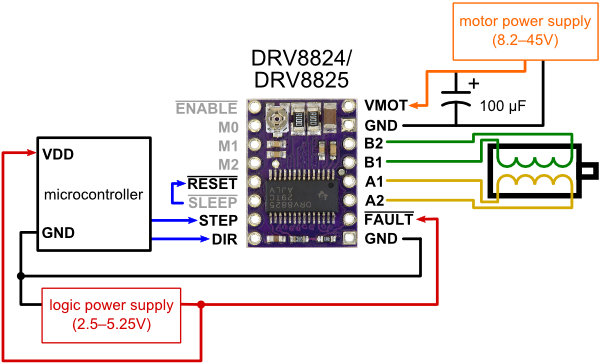
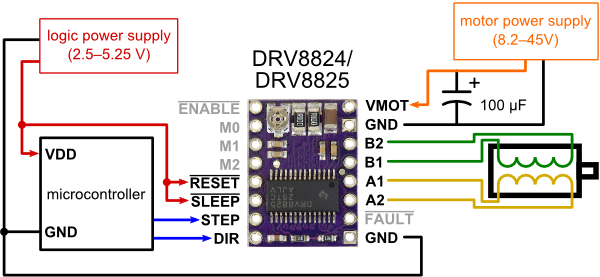
FAULT ist schonmal ein AUSGANG, der gehört nicht an +5V! RESET + SLEEP gehören für Normalbetrieb an Logic-H.
Es gibt zwei Anschlussmöglichkeiten https://a.pololu-files.com/picture/0J4233.600.png?665d623ba84232de64511d8aa6644836 https://a.pololu-files.com/picture/0J4232.600.png?f2f6269e0a80c41f0a5147915106aa55 Wie von Johannes S. (jojos) in dieser Anleitung https://www.pololu.com/product/2133 habe aber auch beide versucht immer das gleiche ergebiss
die zweite Variante ist nur zur Kompatibilität mit den A4988 Modulen, ist nicht besser, sollte aber auch funktionieren. schon merkwürdig, die Dinger sind eigentlich sehr robust und einfach in der Anwendung und schließlich in Millionen 3D Druckern verbaut. Der Autor in dem ersten Dokument schreibt noch von 'min. Halbschrittbetrieb', was bei 200 Hz Fmax aber auch nicht jucken sollte. Und die Temperatur ist auch noch so das man den DRV anfassen kann? D.h. an einem STM32F407 habe ich die auch zum zittern bekommen, da war der Step Puls zu kurz. Die wollen knapp 2 µs haben, das kann man evtl. in der Axelstepper einstellen. Nochn edit: kann man: https://www.airspayce.com/mikem/arduino/AccelStepper/classAccelStepper.html#af4d3818e691dad5dc518308796ccf154 wobei die Doku sagt, min ist 20 µs, aber vielleicht lügt die Doku ja...
Wenn du den im Vollschiittbetrieb betreibst ist klar, dass der ruckelt. Veruchs mal mit kleineren Schritten, 1/8tel oder noch kleiner. Je kleiner die Schritte, desto flüssiger die Bewegung - aber! desto weniger Kraft hat der Motor auch, d.h. du musst mit dem Strom hoch gehen. Ob die 12V reichen, wirst du sehen. Wenn der Motor ab einer bestimmten Ansteuerfreuqenz (Drehzahl) nicht mehr mit kommt ist die Spannung zu gering um die BEMF zu überwinden.
:
Bearbeitet durch User
Ich lese auch das im verlinkten TExt:
1 | The DRV8825 also features a FAULT output that drives low whenever the H-bridge FETs are disabled as the result of over-current protection or thermal shutdown. The carrier board connects this pin to the SLEEP pin through a 10k resistor that acts as a FAULT pull-up whenever SLEEP is externally held high, so no external pull-up is necessary on the FAULT pin. Note that the carrier includes a 1.5k protection resistor in series with the FAULT pin that makes it is safe to connect this pin directly to a logic voltage supply, as might happen if you use this board in a system designed for the pin-compatible A4988 carrier. In such a system, the 10k resistor between SLEEP and FAULT would then act as a pull-up for SLEEP, making the DRV8825 carrier more of a direct replacement for the A4988 in such systems (the A4988 has an internal pull-up on its SLEEP pin). To keep faults from pulling down the SLEEP pin, any external pull-up resistor you add to the SLEEP pin input should not exceed 4.7k. |
Kannst ja mal über 4K7 ne kleine LED gegen Plus schalten, ob die "Aufblitzt". /ENBL würde ich nicht offen hängen lassen. Der gehört auf GND, wenn man ihn nicht braucht. Wo ist denn der Elko zwischen VMM und GND?!? Ich mein, ich seh' ihn ja, kann aber nicht glauben, dass der dort mit den Krokoklemmen nen halben Meter Abstand zum Treiberplatinchen angeklipst ist. Hast Du keinen kleinen Lötkolben ...? Der MUSS direkt auf die Platine von unten an die Stiftleiste
Bei der Drehzahl und 1,5A ohne Belastung dreht der Motor ohne Probleme ganz sauber, WENN der TO denn mal die Verdrahtungsfehler beheben würde. Hermann Kokoschka schrieb: > FAULT ist schonmal ein AUSGANG, der gehört nicht an +5V! > RESET + SLEEP gehören für Normalbetrieb an Logic-H.
Max M. schrieb: > WENN der TO denn mal die Verdrahtungsfehler beheben würde. es ist erstens kein Verdrahtungsfehler (siehe jetzt schon mehrfach verlinkte und gepostete Modulbeschreibung) und zweitens hat der TO auch zuerst die Variante mit offenem Fault und Sleep/Reset an VDD probiert. Ich hätte ja immer noch die Verbindung Arduino GND - Logik GND in Verdacht, mit der schlechten Qualität einiger Dupont Kabel hat Stefan Recht und ich hatte auch schon welche mit Kabelbruch. Aber vermutlich hat der TO das auch schon getauscht beim Umbau von Breadboard auf direkten Anschluss an den Treiber. Man kann noch den Axelstepper durch ein einfaches Toggeln des Step Signals ersetzen, aber diese Lib ist eigentlich auch millionenfach bewährt. Für einen schöneren Aufbau gibt es fertige Shields für 3-4 Steppermodule oder Lochrasterplatinen im Arduinoformat. Oder gleich ein Mega2560 Board mit Shield für 3D Drucker. Die gab es schon immer billig, und jetzt haben noch viele auf 32 Bit Steuerungen umgerüstet und es liegen wahrscheinlich viele der Mega Boards in den Schubladen rum.
Johannes S. schrieb: > kein Verdrahtungsfehler Also das wenige was auf dem Foto zu erkennen ist, läßt mich stark vermuten das der Motor falsch angeschlossen ist. @TO Wenn hier jemand nach Fotos fragt um DEIN Problem zu lösen, ist es nicht zuviel verlangt mehr zu fotografieren als ein Knäuel Kabel. Motor Typenschild und der Verlauf der Kabel sollten schon auch ohne Ratespiel erkennbar sein.
Marvin schrieb: > Hier das Bild und eine Zeichnung Wie gesagt: Dupont kabel sind zur Stromversorgung ungeeignet
der treiber wird gelegentlich wegen unterspannung abschalten, da nach den dünnen leitungen keine 5v mehr ankommen werden.
Stefan ⛄ F. schrieb: > Wie gesagt: Dupont kabel sind zur Stromversorgung ungeeignet Funktioniert bei tausenden Leuten ganz passabel. Bei mir, bei sehr vielen anderen und der Motor selbst hat Dupont Kabel, wie so ziemlich alle in seiner Leistungsklasse. Der Motor hat Null Last, bei sehr gutmütiger Drehzahl. Selbst WENN der Treiber nicht auf seinen Strom kommen würde, würde sich das hier nicht weiter äussern. Aber hier werden die blumigsten Erklärungen an den Haaren herbeigezogen und ganz offensichtlich hat noch niemand das Moter DB gesehen oder die Motorleitungen mal wirklich bis zum Treiber nachverfolgt. Lieber an Mondphasen und Stecker aus Unobtanium glauben die das Problem sind, statt einfach mal professionell die Schaltung zu kontrollieren, in der in 9 von 10 Fällen das Problem liegt.
Max M. schrieb: > Stefan ⛄ F. schrieb: >> Wie gesagt: Dupont kabel sind zur Stromversorgung ungeeignet > > Funktioniert bei tausenden Leuten ganz passabel. Aber nicht desto trotz, ist ihnen nicht zu trauen. Wenn also merkwürdige, unerklärliche Phänomene auftreten, sollte man sie grundsätzlich verdächtigen und dementsprechend kontrollieren! Da sind Kandidaten drunter, wo auch schon mal mittendrin 1-2cm Kupfer fehlt oder oft ist nur das Kabel an die Stecker gedröselt und umspritzt. Letzteres klappt halt nicht immer zufriedenstellend. Das kann sich auch schon mal darin äußern, dass das betreffende Kabel zwischen ein- bis zweistelligen Ohmwerten schwankt. ....
Max M. schrieb: > in > der in 9 von 10 Fällen das Problem liegt. Ich würde sogar sagen in 99 von 100 Fällen ;)
Christian B. schrieb: > Je kleiner die Schritte, desto flüssiger die Bewegung - aber! desto weniger > Kraft hat der Motor auch, d.h. du musst mit dem Strom hoch gehen. Zwischen 1/8 und 1/256 Schrittbetrieb ändert sich herzlich wenig am Drehmoment. Warum soll da irgendeine Kraft runter gehen?
Teo D. schrieb: > merkwürdige, unerklärliche Phänomene Merkwürdig und unerklärlich wird es wenn man die Schaltung geprüft hat und das ist dem TO mangels Kenntniss und uns mangels aussagekräftiger Bilder nicht möglich. Hat der TO erst lange genug darin herumgestochert und den Treiber mal so und mal so angeschlossen ist es auch nicht mehr merkwürdig und unerklärlich, sondern einfach nur kaputtgespielt. Statt also den TO mit eher esotherischen Vermutungen vollens zu verwirren und in die Irre zu führen, sollte man dem mal endlich aussagekraftige Bilder abverlangen und sich wie ein Profi verhalten bei der Fehlersuche.
Max M. schrieb: >> Wie gesagt: Dupont kabel sind zur Stromversorgung ungeeignet > Bei mir, bei sehr vielen anderen und der Motor selbst hat Dupont Kabel Es ging mir um die Stromversorgung der Boards, nicht um die Zuleitung des Motors. Dem Motor wird Spannungsabfall ohne Last ziemlich wurscht sein, der Elektronik aber nicht. Die Chancen stehen zudem recht hoch, dass die Anschlusskabel vom Motor hochwertiger sind, als meine schäbigen Dupont Kabel. Wie gut deine sind, weiß ich nicht.
Max M. schrieb: > Teo D. schrieb: >> merkwürdige, unerklärliche Phänomene > > Merkwürdig und unerklärlich wird es wenn man die Schaltung geprüft hat > und das ist dem TO mangels Kenntniss und uns mangels aussagekräftiger > Bilder nicht möglich. Was hat die scheinbare Unfähigkeit des TOs, mit meinem Beitrag zu tun?!
Johannes S. schrieb: > Max M. schrieb: > >> WENN der TO denn mal die Verdrahtungsfehler beheben würde. > > es ist [..] kein Verdrahtungsfehler Doch genau das ist es! Gruss Chregu
wenn an der Versorgung des Motors etwas Spannung abfällt, dann stört das Null. Zumindest solange der Motor nur unbelastet dasteht (siehe Video) und keine max. Drehzahl/Beschleunigung abverlangt wird. Die Versorgung des Logikteils des Treiber ist seperat und erfolgt wie es aussieht über die +5V vom Uno, also auch ok. Da fließen keine 10 mA und selbst ein paar Ohm Widerstand im Kabel stören nicht. Der Fault Ausgang vom IC liegt über 1,5 k an den +5V. Wenn das IC einen Fehler meldet, dann fließen da 3,3 mA, Testkondition im DB ist 5 mA. Wenn das den Fehler verursachen soll, dann lerne ich stricken. Kabelbrüche sind etwas anderes, da hilft einfach mal ein anderes Kabel zu nehmen. Und der Elko über Krokoklememen weit weg ist auch nicht ideal, aber fraglich ob das den Fehler in der gezeigten Form verursachen kann. Und warum hin- und herprobiert vorwerfen? In der Anwendungsbeschreibung von Pololu sind zwei Beschaltungen gezeigt, wobei die zweite nur andeutet was passiert wenn man das Modul in einer Schaltung einsetzt, die für einen A4988 konzipiert war. Für den Fall ist das Modul kompatibel entworfen worden, so einfach ist das. Und ein Datenblatt vom Motor bräuchte ich nicht. Das sind 0815 Stepper für 3D Drucker und andere Anwendungen, die passen einfach. Ich habe mit desem Treiber verschiedene von NEMA11 bis 23 betrieben, die laufen einfach damit. Für die max. Performance müssen natürlich Strom und Spannung am Treiber optimiert werden, aber so Fehler wie im Video des TO bekommt man damit nicht hin.
Johannes S. schrieb: > Die Versorgung des Logikteils des Treiber ist seperat und erfolgt wie es > aussieht über die +5V vom Uno, also auch ok. Da fließen keine 10 mA Gutes Argument, das habe ich nicht berücksichtigt.
Stefan ⛄ F. schrieb: > Gutes Argument, das habe ich nicht berücksichtigt. Dann können wir ja doch wieder Freunde werden :)
Johannes S. schrieb: > In der Anwendungsbeschreibung > von Pololu sind zwei Beschaltungen gezeigt Hast Du mal versucht die Motorleitungen bis an die Anschlüsse des Treibers nachzuverfolgen und auch die anderen Leitungen vom Treiber bis zum Arduino? DU magst ja davon ausgehen das der TO aufgebaut hat was das Schaltbild sagt. ICH bezweifel das doch sehr.
Motor: Es sind vier Anschlüsse, im verlinkten Artikel ist beschrieben wie man die Paare lokalisert. Was soll man da falsch machen? Man kann den Leuten auch mal etwas glauben. Und der Tipp, mal zwei Adern zu vertauschen, der kam ja auch schnell. Dir/Step: würde sicher nicht das gezeigte Video erklären wenn die vertauscht sind. Ja, ein besseres Bild wäre schöner.
Angehängte Dateien:
-

1642182191381.jpg
230 KB -

1642182191391.jpg
230 KB -

1642182191401.jpg
220 KB -

1642182191410.jpg
230 KB




habe mein SteckBrett und die Kabel getestet bei 12V 1A keine Probleme. Bei 12V 2A erwärmen sich die Kabel nach ca. 30 sec. Damit würde ich behaupten das mein Aufbau für den Test des Schrittmotors keine Probleme darstellen sollte zu dem der Schrittmotor weniger als 0,6 Ampere zieht.
Marvin, sieht ja nicht mal soooo schlecht aus. Überprüfe aber bitte nochmals alle Verbindungen, besonders den GND, ob sie auch wirklich Kontakt haben! Und versuche mal mit einem anderen DRV. Und zeig mal die Software, ob die richtigen Pins verwendet wurden... Gruss Chregu
Christian M. schrieb: > Überprüfe aber bitte > nochmals alle Verbindungen, besonders den GND Vor allem ob Digital_GND und Motor_GND, auch wirklich auf dem Modul verbunden sind. Obwohl, ich hab mir mal das Video angeguckt. Also ich halte das für ein SW Problem, bzw. Ansteuerungsproblem.... PWM anstatt Seppimpulse oä.?-/
Teo D. schrieb: > Seppimpulse :-) Teo D. schrieb: > ich hab mir mal das Video angeguckt. Also ich halte das für ein SW > Problem Ja, warum bewegt der sich beim Initialisieren? Gruss Chregu
so habe mal beim Arduino am Pin 2 (Dir Pin) eine Spannung von nur 2,55 Volt gemessen, sollte da nicht eine Spannung von 5 Volt liegen? Wenn ich einen Sketch wie den "Blink- Sketch" auf Pin 2 lege bekomme ich dort die 5 Volt raus habe auch mal den UNO nicht am PC sondern an einem Netzteil angeschlossen aber gleiches Ergebniss bekomme dann auch nur 2,55 Volt mit dem AccelStepper Sketch getestet mit zwei Arduino's
Die beiden Ausgänge erstmal auf Output konfigurieren? Wie im Blinky Sketch? Warum werden in Arduino Beispielen oft die Copy Konstruktoren verwendet? Das ist auch nicht immer gut. im Axelstepper werden die Ausgänge eigentlich enabled, mit dem Copy Konstruktor evtl nicht mehr.
1 | AccelStepper stepper(AccelStepper::DRIVER, stepPin, dirPin); |
auch versucht ändert auch nicht's. wenn ich Pin 2+3 (Dir + Step) abziehe dürft der sich ja nicht drehen, aber er ruckelt dann nach links und rechts. setze ich den StepPin (3) auf GND oder 5 Volt bleibt er stehen.
dadurch das ich die Pins auf Output gesetzte habe im Sketch
1 | pinMode (2, OUTPUT); |
2 | pinMode (3, OUTPUT); |
haben diese 5 Volt
Marvin schrieb: > wenn ich Pin 2+3 (Dir + Step) abziehe dürft der sich ja nicht drehen, > aber er ruckelt dann nach links und rechts. > setze ich den StepPin (3) auf GND oder 5 Volt bleibt er stehen. Es WUNDERT DICH, dass Probleme entstehen wenn Signaleingänge in der Luft hängen? Echt? JA, angeblich sind PullUp/downs auf dem DRV-Modul, in der Praxis habe ich zig-mal damit Probleme gehabt, das gilt auch für die Modus-Eingänge Alle Eingänge gehören auf definierte Pegel. Und diese Klamotte aus einem Deiner ersten Links (SLEEP an RESET) ist auch nicht erklärbar, EGAL WELCHER ARDUIDIOT das irgendwo publiziert hat! SLEEP+RESET sollen (angeblich) interne Pulldowns haben, kannst Du bitte mal erklären, WOHER DIE BITTE durch pures Zusammenlegen dann die nötigen H-Pegel bekommen sollen? Erklärst Du das mal bitte!? HÖRE AUF, blind irgendwelche Bilder von ARDU-IDIOTEN nachzustecken, sondern lege erstmal alle Signale auf vernünftige Pegel.
Hermann Kokoschka schrieb: > Und diese Klamotte aus einem Deiner ersten Links (SLEEP an RESET) ist > auch nicht erklärbar, EGAL WELCHER ARDUIDIOT wer hat dich den mit der Brotkrume aus dem Urwald gelockt? Anstatt hier rumzuschreien und Leute zu beleidigen solltest du vielleicht erstmal Englisch und Schaltpläne lesen lernen, dann würdest du es vielleicht verstehen. Nur noch anonyme Flachzangen hier, echt nicht mehr auszuhalten.
Johannes S. schrieb: > solltest du vielleicht erstmal > Englisch und Schaltpläne lesen lernen, dann würdest du es vielleicht > verstehen. Offenbar verstehst DU es nicht richtig! Und DU hast die angehängen Steckbilder HIER NICHT betrachtet, wie kommst AUSERECHNET DU dann zu Kritik? Beantworte einfach KONKRET die Fragen die ich stellte oder WIDERLEGE PLAUSIBEL meine Angaben, speziell zu dem "Sleep=Reset=in-der-Luft" Thema aus einem der Steck-/Schaltbilder. (Die DU ja bisher nicht gesehen hast)
die hängen NICHT in der Luft. Lerne Englisch und Schaltbilder lesen. Ich erkläre es nicht nochmal. Und danach darfst du dich entschuldigen.
Marvin schrieb: > 2,55 Volt DC mit dem Multimeter siehst Du die PWM nicht. Mach dazu mal eine AC Messung, dann siehst Du das sich da was tut.
ich habe es mal nachgebaut mit Teilen die ich habe, funktioniert: https://youtu.be/ORaUkg5gfWc und mit mehr Speed: https://youtu.be/lsKjRJhcFeY Verwendet habe ich einen Arduino Leonardo, Uno habe ich nicht, sollte aber keinen Unterschied machen. Treiber ist ebenfalls DRV8825, 12 V bzw. etwas mehr von Labornetzteil. Die Referenzspannung ebenfalls auf 0,7 V gestellt, damit komme ich aber auf etwa 0,36 A @ 13,7 V. Den 100 µF Kondensator kann ich raus ziehen, macht keinen Unterschied. Der gehört natürlich eingebaut, aber ohne produziert das nicht den gezeigten Fehler. Auch nicht bei Speed=20000 und Versorgung über Breadboard Drähte. Code ist cut&paste aus dem hier geposteten Beispiel. ein grober Unterschied ist, das bei mir beim download der Stepper sofort stehen bleibt, nix zittern. Beim Betrieb zeigt mein Multimeter an Step ca. 0 V an, da kommen ja kurze Pulse und bei DC könnte da höchstens irgendein Integral angezeigt werden. An Dir kann man messen, da liegen eben je nach Richtung 0 oder VUSB, bei mir ca. 4,8 V an. @Marvin: das scheint jetzt das Problem bei dir zu sein. Mit einem Test mit statischer Ausgabe scheinen ja richtige Pegel anzuliegen. Hast du eventuell einen falschen Bootloader auf dem Uno? An der Stelle ist mein Arduino Wissen auch am Ende, ich weiß nicht was man da falsch machen kann. Ein einfacher Test wäre noch mal andere Pins für Step und Dir zu benutzen.
Ich würde die Signale mit einem Oszilloskop oder Logic Analyzer kontrollieren.
Angehängte Dateien:
-

IMG_1231.jpg
230 KB

wird Marvin wohl nicht haben, sonst hätte er es sicher schon gemacht. Und die low cost LA zeigen ja keine Pegel, helfen in so einem Fall auch nur bedingt. Aber ich würde es auch als Basisausrüstung sehen wenn man etwas mehr machen möchte. Und für die Zweifler und die, die keine Schaltpläne lesen können: es funktioniert auch in der A4988-Modul kompatiblen Beschaltung.
Das zeigt mal wieder, das diese Shields mit Minimalbeschaltung für Anfänger nicht zu gebrauchen sind. Ich würde den Elko bei dem Aufbau noch größer wählen (470µ) und zusätzlich einen 100nF THT Kerko direkt an die Anschlusspins vom Shield löten. Und wenn möglich die Spannung etwas erhöhen (15V), um mögliche Spannungsabfälle über den dünnen Leitungen zu kompensieren. Der Motor wird schon richtig angeschlossen sein, sonst würde er überhaupt nicht richtig drehen. Bei 1/4 Schritt sollten da auch keine nennenswerten Resonanzen auftreten, die zum Stallen führen. Mit freundlichen Grüßen Thorsten Ostermann
Ich kann mich zwar irren, aber soweit ich das überblicken kann, ist DAS die Schaltung (mit Code) die der TO da nachbauen will. https://arduino-projekte.info/schrittmotor-ansteuern-mit-arduino-a4988/ Sieht jedenfalls verdammt ähnlich aus ;)
Unterhalb von 8V schaltet der Treiber ab. Spannung erhöhen und größerer Elko scheint das Mittel der Wahl Bei dem Aufbau kann die Spannung unter den Stromspitzen darunter fallen. Marvin schrieb: > Der Motor zieht auch nie mehr als 0,550A laut des Netzteils Die PWM-Endstufe arbeitet wie ein Stepp-Down-Wandler. Der Strom durch den Motor kann größer sein als der, der aus dem Netzteil kommt. Gruß Jobst
Beitrag #6944368 wurde vom Autor gelöscht.
Bernhard S. schrieb im Beitrag #6944368: > Der Motortreiber ist nicht an 5V (Logic Power Supply), 2. Pin unten > rechts, angeschlossen! ohne das zu prüfen, DESWEGEN macht man IMMER einen Schaltplan und zieht von ANFANG bis ENDE JEDE gelegte Verbindung und nachgemessene Verbindung mit Null Ohm mit einem Textmarker nach. Man sieht sofort eine vergessene Verbindung und vergeudet nicht Stunden mit Fehlersuche!
:
Bearbeitet durch User
Danke euch allen für eure große Hilfe, und an Johannes S. (jojos) für das nachbauen. Hab es noch mit zwei Uno's, Node-MCU, und einen Mega versucht, mit anderen Pin's und auch mit 15 Volt. Oszilloskop oder Logic Analyzer habe ich leider nicht, werde weiter schauen woran es liegen kann. Johannes in deinem Video hast du am Dir Pin zwei Kabel angeschlossen wofür ist das?
da war dann das Multimeter dran. Läuft das bei dir trotzdem noch nicht? Also Controller gewechselt, Treiber gewechselt, verschiedene Spannungsversorgungen? Sehr hartnäckiger Fall, vielleicht kann dir jemand in der Nähe helfen wenn du mal die grobe PLZ nennst.
Angehängte Dateien:
-

webHilfs_oszi.jpg
91 KB

Marvin schrieb: > Oszilloskop die billigsten ausreichend gabs mal ab 10€? lange her ebay dso138 genau schauen ob es nicht nur das Gehäuse ist! heute ab 21,€ aber fertig aufgebaut für 40,-€ + Netzteil ist ja auch noch bezahlbar https://www.ebay.de/itm/403164930803 PWM Beispielbild
:
Bearbeitet durch User
Johannes S. schrieb: > Also Controller gewechselt, Treiber gewechselt, verschiedene > Spannungsversorgungen? Wie es scheint nicht alles: Marvin schrieb: > Hab es noch mit zwei Uno's, Node-MCU, und einen Mega versucht, mit > anderen Pin's und auch mit 15 Volt. 15V von wo? Anderes Netzteil? Und den Treiber mal wechseln! Und Teo D. schrieb: > Christian M. schrieb: > >> Überprüfe aber bitte >> nochmals alle Verbindungen, besonders den GND > > Vor allem ob Digital_GND und Motor_GND, auch wirklich auf dem Modul > verbunden sind. !!! Warum wird das ignoriert? Gruss Chregu
Angehängte Dateien:
-

0J4222.600.jpg
57 KB

{kind=link}
{kind=link}
Teo D. schrieb: > Vor allem ob Digital_GND und Motor_GND, auch wirklich auf dem Modul > verbunden sind. Sind verbunden. Durch Messung bestätigt. Gruß Jobst
einen habe ich noch: habe gerade mal die Leitung vom SM vertauscht, so das nicht die Paare passend zusammen sind. In dem Fall geht der Treiber sofort in den Fault Zustand (LED über R an Fault Ausgang und +5V) und der Motor steht still. Der Motor wird stromlos und der Treiber braucht einen Reset (Power Off/On). Dann habe ich im Betrieb eine Motorleitung abgezogen: in diesem Fall geht der Treiber auch meistens in den Fault Zustand, aber nicht immer. Teilweise macht der Motor genau die kraftlose Drehbewegung und das Zucken wie in Marvins Video. Ich konnte den Motor sogar mit drei Anschlüssen starten, er hat sich hin- und her gedreht, aber ohne Kraft. D.h. der Fehler kann im Anschlusskabel des Motors liegen. Selbst wenn man beide Spulen niederohmig messen kann, könnte da eine schlechte Verbindung oder Kabelbruch sein die beim höheren Motorstrom aufgibt. Nachtrag: an den Motorleitungen etwas im Betrieb zu ändern kann den Treiber zerstören, steht auch im Pololu Artikel. Die TMC Treiber kann man damit zuverlässig sprengen, mein DRV hat es überlebt.
komme aus 67227 habe 5 SM daran getestet bei allen das selbe Ergebnis. Wenn ich eines der Kabel zum Motor trenne, auch noch am zittern und der Motor zieht nur noch < 0,3 Ampere, (wird ja auch nur noch eine Spule benutzt). Habe mal die SM an meinem 3D-Drucker angeschlossen dort laufen sie Flüssig. Momentan weis ich nicht was ich noch ausprobieren kann
und auch das rot-grün-blau-schwarze Kabel getauscht? Dann wurden auch schon alle Komponenten getauscht? Ist die AccelStepper verbastelt, hast du die auch mal neu installiert?
Marvin schrieb: > Momentan weis ich nicht was ich noch ausprobieren kann Hallo Marvin, ich hoffe Du hast die Ursache für das Problem Schrittmotor/DRV8825 inzwischen gefunden ? Ich vermute, ich habe ein vergleichbares Problem und kann den Fehler leider nicht finden. Mein NEMA17 hat 1 A, das Netzteil 24V. Habe auch alles gewechselt, mehrere DRV8825, Arduinos, Netzteil durch Labornetzteil ersetzt, Kabel geprüft, einen anderen Schrittmotor benutzt, mit und ohne Microstepping... Ich habe versucht alle Empfehlungen und Schritte in Deinem Thema nachzuvollziehen. Das Ruckeln bleibt. Manchmal ruckelt er nur, manchmal macht er ein paar Schritte. Die Sketch-Befehle scheinen nicht anzukommen ? Irgendwo habe ich einen Fehler. Ich weiß nicht, ob es Sinn macht ein neues Thema zu eröffnen ?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.