Hi, ist mein erster Post hier. Ich wollte mal an einem µC Projekt arbeiten und dachte mir: Ein Joystick bzw Controller wäre doch ganz cool. Also grob zum Aufbau: Im Gegensatz zum "normalen" Joystick sollte der hier statt sphärisch linear laufen. D.h. X und Y würden gerade (evt. auf Schienen? z.B. im H Aufbau) verlaufen, damit der Aufbau generell flacher ist. Allgemein wollte ich zu der X und Y-Achse auch eine Rotation um die Z-Achse ermöglichen. Die krieg ich ja locker mit einem Drehpoti hin. Ich weiß, die Position normaler Joysticks werden über Drehpotis oder Hall-Sensoren abgefragt, das ist hier ja leider nicht möglich. Ich hatte auch schon 3 Möglichkeiten, wie ich die Position bestimme: 1) Lineare Potis, die auf den Schienen angebracht sind. 2) 3D Hallsensoren. Da bin ich mir aber nicht sicher wie die Dinger genau funktionieren (Muss der Magnet für X und Y anders gedreht sein?). 3) Touchpad-Panel und ein "Gleiter" der die Elektroden aktivieren kann. Hier bin ich mir nicht sicher, welche Genauigkeit ich erreichen kann, da ich hier wieder in die diskrete Messung gehe. Wie würdet ihr das am besten realisieren?
Auf jeden Fall nicht mit Potis, wenn dann mit Hall Sensoren...einen für jede Achse. Und hier gibts noch ein interessantes Projekt fürs interface, funktioniert prima: https://github.com/FreeJoy-Team/FreeJoy Warum mit Linearschienen? Nur wg. Einem flacheren Aufbau? Interessant sind auch die Teile hier...vll. Kannst du sowas direkt verwenden: https://3dconnexion.com/de/product/spacemouse-compact/?gclid=EAIaIQobChMIi_ak_7n89QIVtZBoCR2LdwxhEAAYASAAEgIauPD_BwE Die können sowohl rotatorische, wie auch translatorische Bewegung in jeder Achse.
Die Spacemouse hab ich schon gesehen, die find ich zwar echt cool, aber dafür auch sehr teuer. Und es geht mir ja hier ums selber bauen. Ich denke, die Linearführung wäre weniger wichtig, wenn die Rotation flacher wäre, aber dadurch wird der Aufbau wieder höher. Allgemein will ich gerne einen Joystick bauen, den man mit der Handfläche bzw. wie eine Maus bedienen kann (natürlich in jeder Achse limitiert) und zusätzlich eine Drehachse hat. Würde im Endeffekt wie ein Puck aussehen. Ja Hall-Sensoren hatte ich wie gesagt auch schon im Blick. Da gibt es dann die normalen Teile, die praktisch eine Richtung erkennen (und bei einem Offset schon anders reagieren) und dann die 3DHall-Sensoren, die schon 3 Hall Sensoren integriert haben. Die Frage ist hier aber: Wenn ich einen Magneten am unteren Ende des Joysticks befestige und die Hall Sensoren jeweils davor und links (bzw. rechts) dann habe ich a) außer bei reinen X und Y Bewegungen IMMER einen Offset b) ist immer noch das Problem offen, dass der Magnet ja anscheinend je nach Achse anders ausgerichtet sein muss.
Mit Offset meinst Du, dass die Sensoren bei 0 Gs dann z. B 2,5 V bei 5 V Eingang ausgeben? Dann kannst Du den Hall Sensor mit einem anderen Magneten "Vorspannen" bis dass der Hall Sensor sein Minimum ausgibt.
Also im Grunde genommen eine stinknormale optische Maus jedoch mit zwei optischen Sensoren die ein ein paar Zentimeter voneinender entfernt sind. Damit lässt sich auch eine Drehbewehung erfassen. Ich frage mich bei diesem Gedanken grade warum es soetwas noch nicht gibt?
Okay, so tief stecke ich gerade nicht in der Materie (wie gesagt, ich habe Hall Sensoren nie verwendet). Mit Offset meine ich, dass wenn sich ein Magnet dem Sensor nähert, der Sensor ja entweder die Spannung erhöht oder verringert (je nach Polarität bzw. welche Seite des Magnetes man verwendet). Das Maximum/Minimum ist dann bei einer gewissen Distanz erreicht (sagen wir mal S0). In einem Video zu 3D-Hallsensoren habe ich gesehen, dass wenn der Magnet nicht genau von Oben darauf zukommt, das Verhalten zunächst gleich aussieht, aber noch bevor man S0 erreicht, die Spannung plötzlich absinkt (anscheinend, weil das Magnetfeld ja auch anders auf den Hallsensor wirkt). Um es mal in TextBild zu zeigen: || ist der Hall-Sensor ()__)__) ist der Magnet || <----()__)__) Das wäre der normale Hergang. || <----()__)__) Hier würde die Spannung noch vor S0 abfallen. Zudem ist die Frage ja immer noch: Ich habe ja genau 1 Magnet am unteren Ende des "Joysticks". Müsste sich dann nicht einer der Hall-Sensoren anders verhalten, da die Ausrichtung der Pole relativ zum jeweiligen Hall-Sensor anders ist?
...dafür dass sich dann Dein Mauszeiger um seine eigene Achse dreht? ^^ Dafür gibts ja dann die SpaceMouse Teile... Aber trotzdem ne gute Idee mit den 2 optischen Sensoren
@Ideevielleicht Den Gedanken hatte ich auch schon. Doch soll der "Joystick" ja auf seine 0-Stellung zurück, wenn man ihn loslässt. Da optische Mäuse ja "nur" Änderungen bemerken ist die Genauigkeit nicht gegeben. Das heißt, ich kann genau die selbe Strecke vor und zurück fahren und die Maus kann eine andere Endposition daraus berechnen.
Dennis Z. schrieb: > Die Spacemouse hab ich schon gesehen, die find ich zwar echt cool, aber > dafür auch sehr teuer. Und es geht mir ja hier ums selber bauen. Nur kannst du da schauen wie die lineare Bewegung aufgenommen wird.
Cyblord -. schrieb: > Nur kannst du da schauen wie die lineare Bewegung aufgenommen wird. Dem hohen Aufbau zufolge sieht das für mich nach einer Rotationsbewegung aus. Die tiefe Achse sorgt, denke ich, dafür, dass es sich linear anfühlt. Der Nintendo 3DS Thumbstick hat eine lineare Translation (meine ich). Im Endeffekt aber Jacke wie Hose :P. Nicht böse gemeint. Ich will keinen verärgern (vor Allem weil ich neu bin): a) Ich werde mir weder 3DS noch Spacemouse kaufen um sie zu zerlegen b) Möchte ich ja gerne mit einem µC was selber bauen Daher frage ich ja hier nach ob es da Ideen gibt.
Dennis Z. schrieb: > Da optische Mäuse ja "nur" Änderungen bemerken ist die Genauigkeit nicht > gegeben. Das heißt, ich kann genau die selbe Strecke vor und zurück > fahren und die Maus kann eine andere Endposition daraus berechnen. Ja, aber ich kann die Maus hochheben und woanders platzieren. Genau so wie ich das in Games auch praktiziere. Ganz sicher lässt sich daraus mit entsprechender Software ein praktikabler "Mouse-Stick" entwickeln. Ja ich weiß, ist ein bischen visionär was ich da schreibe. Aber vielleicht könnte das eine gute Anregung sein.
Dennis Z. schrieb: > b) Möchte ich ja gerne mit einem µC was selber bauen Aber Konzepte kann man sich trotzdem holen. Tust du hier im Forum ja auch. Ich denke die möglichen sind bekannt, wie man grundsätzlich solche Bewegungen erfassen kann.
Cyblord -. schrieb: > Aber Konzepte kann man sich trotzdem holen. Tust du hier im Forum ja > auch. > > Ich denke die möglichen sind bekannt, wie man grundsätzlich solche > Bewegungen erfassen kann. Ja sicher. Aber wie gesagt: zum Studieren sind die Teile zu teuer. Nur nochmal zurück zu den Hall-Sensoren. Wie würde so ein Aufbau aussehen? Ich verstehe halt immer noch nicht, wie man 2 Sensoren verwenden könnte. Einem Hall Sensor nähert man sich doch immer mit einer Seite des Magneten, dann bekäme aber der andere Sensor aber praktisch immer die volle Breitseite (sozusagen)
Dennis Z. schrieb: > Cyblord -. schrieb: >> Aber Konzepte kann man sich trotzdem holen. Tust du hier im Forum ja >> auch. >> >> Ich denke die möglichen sind bekannt, wie man grundsätzlich solche >> Bewegungen erfassen kann. > > Ja sicher. Aber wie gesagt: zum Studieren sind die Teile zu teuer. Google: "spacemouse teardown" > > Nur nochmal zurück zu den Hall-Sensoren. Wie würde so ein Aufbau > aussehen? > Ich verstehe halt immer noch nicht, wie man 2 Sensoren verwenden könnte. > Einem Hall Sensor nähert man sich doch immer mit einer Seite des > Magneten, dann bekäme aber der andere Sensor aber praktisch immer die > volle Breitseite (sozusagen) Pro Achse ein Sensor und 2 Magneten. Nicht der Sensor bewegt sich, sondern die Magnete. Also so (rechtes Bild)...da wird auch das Offset kompensiert: https://hackaday.com/wp-content/uploads/2020/10/halleffect_magnets.png?resize=800,299
Dennis Z. schrieb: > Wie würdet ihr das am besten realisieren? Da die üblichen Joystickeingänge Potis sehen wollen, würde ich auch Potis verwenden. Sonst bräuchtest du halt noch eine aufwändige Elektronik. Wenn es sich mechanisch anbietet entnimmt man nur die Widerstandsbahn und den Schleifer aus einem Fader. Interessanter ist die Mechanik, die du wohl besonders flach hinbekommen willst, und die auch gut gleiten soll ohne zu klemmen. Wenn du am Rand zumindest den halben Potiweg als zusätzliche Fläche hast, kann man sogar ein starre Abdeckung haben.
Hermann S. schrieb: > Pro Achse ein Sensor und 2 Magneten. Nicht der Sensor bewegt sich, > sondern die Magnete. > Also so (rechtes Bild)...da wird auch das Offset kompensiert: > https://hackaday.com/wp-content/uploads/2020/10/halleffect_magnets.png?resize=800,299 Okay ich hab gesehen wie die Spacemouse funktioniert. Echt clever. Weder Hall noch Potis sondern nur Dioden und Schlitze vor den Fototransistoren. Das ganze "schwebt" sozusagen auf 3 Federn. Wenn man jetzt die Rotation blockieren würde, hätte ich genau das, was ich suche. Ich müsste nur den Weg etwas vergrößern, da ich ja keine Bewegungsänderung weiter geben will, sondern eine absolute Position. Danke für den Tipp! Zu deinem Bild: In welche Richtung bewegen sich die Magneten in deinem Beispiel?
Dennis Z. schrieb: > Wie würdet ihr das am besten realisieren? Da kommt auf die Anwendung an. Bei einem Joy-Stick ist normalerweise keine Präzision erforderlich, weil der sowieso in einem Regelkreis sitzt. Für eine genaue, lineare Positionsmessung eignen sich sonst Glasmeßstäbe, wie sie z.B. in Maschinen für Längenmessungen eingesetzt werden.
> Nur nochmal zurück zu den Hall-Sensoren. Wie würde so ein Aufbau > aussehen? > Ich verstehe halt immer noch nicht, wie man 2 Sensoren verwenden könnte. Löse dich erstmal von der Idee dass z.B Magnete direkt unterm Puck fix angebracht sind: das kommt schon davon weg dass sie sich sowohl in X wie auch in Y in der Ebene bewegen denn das soll nur der Puck als Griff. Stell dir vor z.b ein Magnet mit Loch rutscht auf z.b einem Zahnstocher, an einem Ende des Zahnstochers dann z.b der Hallsensor. Nun bleibt der Magnet also immer "frontal auf der Achse" zum Sensor. Ich schreibe immer "z.b" weil anstellt Magnet/Hallsensor könnte es auch ein Seilzug sein der einerseits auf Umlenkrolle und andererseits um Potiachse läuft. Von solchen eindimensionalen Linearsensoren werden halt 2 benötigt: je 1 f. X und Y. Jetzt erst kommt die Frage wie der Puck der auf einer begrenzten (rechteckigen? ovalen?) fläche rutscht, mit dem X UND Y Linearsensor mechanisch zu verknüpfen ist... Schau dir mal an (nur als Inspiration!) wie Kreuztische f. Fraesen gemacht sind. So wird es zwar nicht gehen, aber du suchst ja irgendwie das umgekehrte... :-) Also so etwas wie 2 orthogonal zueinander verbundene Schiebekulissen. Ich denke Kunsstoffplatten mit Längsrillen (Halbzeug oder 3D-gedruckt - vgl. Wellkarton gleiten aufeinander ungefähr passend für dein Experiment... Mein geschreibsel dürfte als Denkanstoss reichen, ja?
Habe jetzt nicht alles gelesen, hier ist noch eine Space Mouse zum selber bauen: https://github.com/FaqT0tum/Orbion_Space_Mouse
Ein einzelner 3D-Hallsensor (2D könnte auch gehen) in der Mitte sollte eigentlich für X- und Y-Position reichen, denn der liefert nicht nur Richtung sondern auch Stärke das Magnetfeldes und damit Abstand. Magnetpole vertikal am Stick. Mit einem zweiten Sensor am Rand und den Magnetpolen horizontal am Stick kann man vielleicht sogar die Z-Achse messen.
Angehängte Dateien:
-

3dMouse2.png
130 KB -

3dMouse.png
190 KB
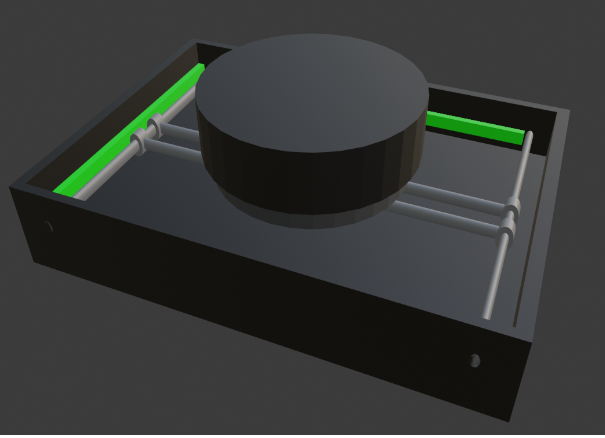
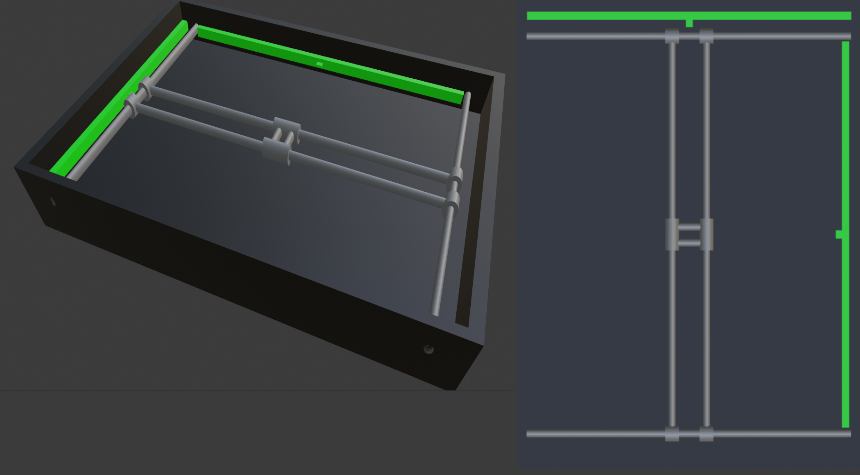
Okay. Ich hab mal ein wenig in Blender gespielt und ein grobes Modell entworfen, wie ich mir das in etwa vorgestellt habe. Die Positionsfedern habe ich erstmal weggelassen, da sie dann eh am Puck und Boden befestigt werden. In der Version hier werden 2 Linear-Potis verwendet (man kann sie ja denke ich durch Magnet + Hall ersetzen auf jeder Achse. Oder 3D-Hall im Zentrum). Was haltet ihr davon?
Dennis Z. schrieb: > Was haltet ihr davon? Man sieht auf Anhieb, wie es verkantet, und ohne die intellektuell viel schwierigere Abdeckung fällt noch das halbe Brot rein. Noch sehr naiv, noch sehr Kindergarten. Besorge dir mal 2 alte 5 1/4" Floppylaufwerke und deren Kopfschlitten, möglichst die noch auf 2 Achsen gelagerten.
ich kann mir nicht vorstellen das so etwas läuft ohne schnell zu klemmen. Das müssen dann schon sehr präzise und steife Schienen und Lager sein.
Die maße MaWin schrieb: > Man sieht auf Anhieb, wie es verkantet, und ohne die intellektuell viel > schwierigere Abdeckung fällt noch das halbe Brot rein. Die Maße sind jetzt nicht zu 100% das was ich mir vorstelle. Ist nur ein schneller Entwurf gewesen. Die Abdeckung wäre eine Platte mit Kreisausschnitt.
Dennis Z. schrieb: > Ich weiß, die Position normaler Joysticks werden über Drehpotis oder > Hall-Sensoren abgefragt, das ist hier ja leider nicht möglich. Nein. Meistens gibt es nur einen Schalter in der Endposition. Einen Joystick mit Potis gab/gibt es nicht oft.
Angehängte Dateien:
-

3dMouse3.png
510 KB
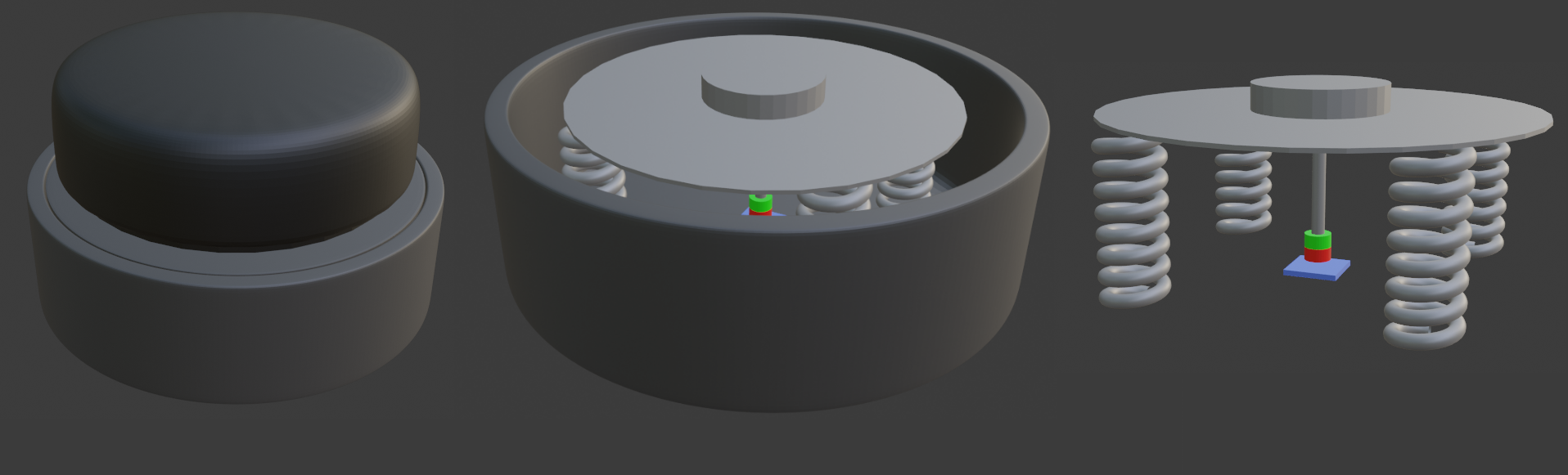
Hm okay. Ohne euch nerven zu wollen (ich hab nicht so viel Ahnung bis jetzt. Wäre mein 1. Projekt), wäre hier meine 2. Idee. Das blaue ist der 3D Hall Sensor. Das ganze ist auf Federn gelagert. Damit es keine Neigungsbewegung gibt, ist auf der Unterseite des Deckels eine Scheibe angebracht. Wäre das so möglich?
Gerald B. schrieb: > Nein. Meistens gibt es nur einen Schalter in der Endposition. Einen > Joystick mit Potis gab/gibt es nicht oft. Du kommst wohl von C64 oder Amiga? Am PC gab es schon immer analoge Joysticks. Früher mit Potis die immer am driften waren, heute mit HAL-Sensoren.
Blechbieger schrieb: > Du kommst wohl von C64 oder Amiga? Am PC gab es schon immer analoge > Joysticks. Früher mit Potis die immer am driften waren, heute mit > HAL-Sensoren. Vor allem hat er wohl nie eine Modellfunkfernsteuerung besessen, die hatte weitgehend analoge Kreuzknüppel. Der Apple ][ auch. Drift ist bei Potis kein Problem, bei Hallsensoren hingegen erheblich.
Blechbieger schrieb: > Du kommst wohl von C64 oder Amiga? Am PC gab es schon immer analoge > Joysticks. Früher mit Potis die immer am driften waren, heute mit > HAL-Sensoren. Schon mein Apple //c hatte analoge Joysticks.
>> Früher mit Potis die immer am driften waren, heute mit >> HAL-Sensoren. > > Schon mein Apple //c hatte analoge Joysticks. Du Nachzügler du... (Apple II hier) ;-) Was da driftete waren nich die Potis, sondern Schaltung als ganzes: die Potis sind da Teil eines RC-Zeitgliedes. Unsorgsam (aka billig) ausgefûhrt sind RC-Zeitglieder in der Tat nicht für Stabilität bekannt.
Angehängte Dateien:
-

3dMouse4.png
390 KB
{kind=link}
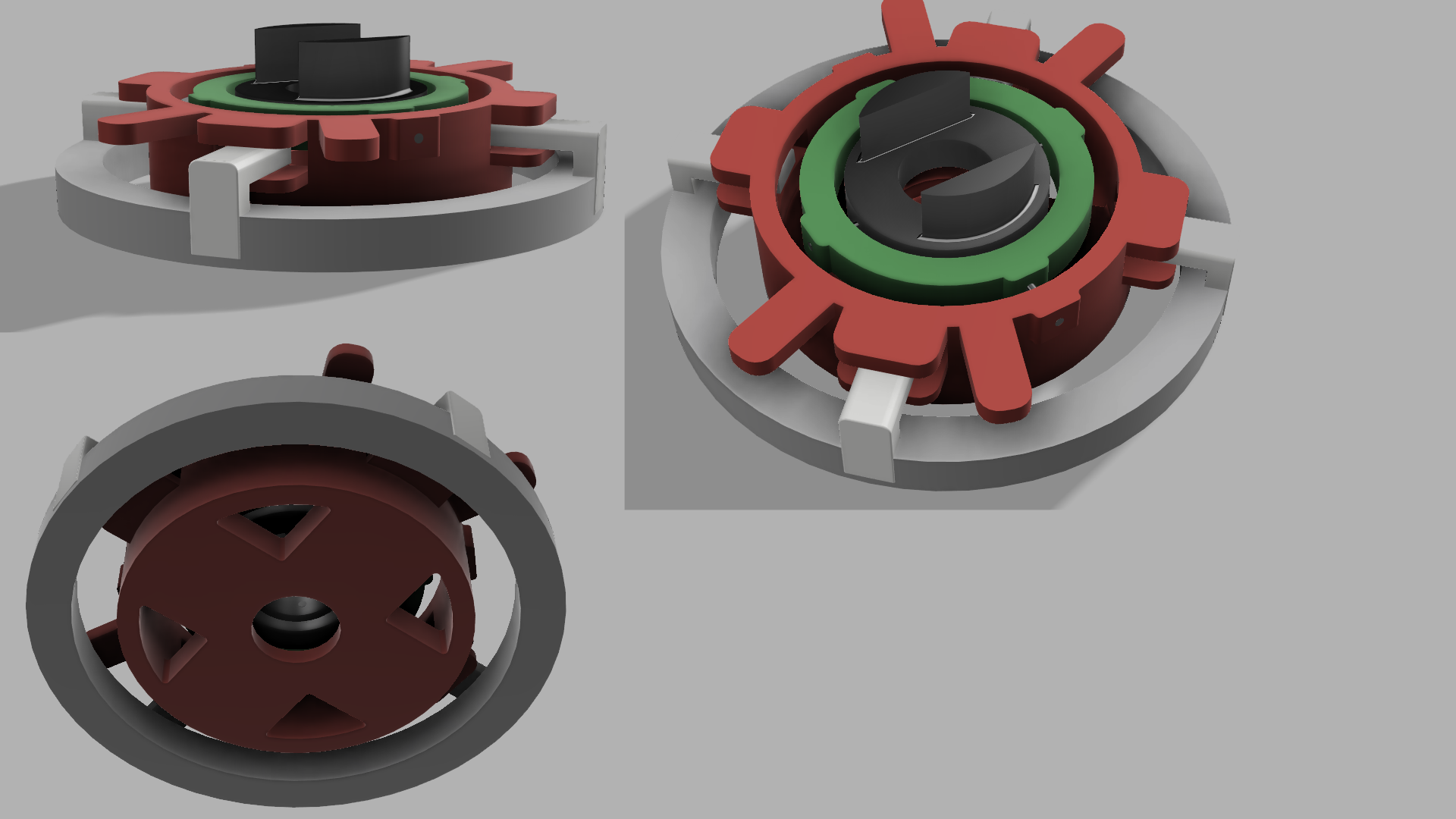
So. Habe mich das Wochenende mal etwas inspirieren lassen und mir ein paar Gedanken gemacht. Die Spacemous ist schon ziemlich cool. Aber allein die 1D Position sensitiven Detektoren kosten einiges. Dann hab ich mir ein paar Youtube Videos dazu angeschaut und bin auf ein interessantes Projekt gestoßen. Hab mich dann mal ein wenig an CAD versucht und das ist dabei rausgekommen. So unterstützt das Teil zunächst lineare Bewegung in X und Y Richtung mittels an der Unterseite angebrachten Hall-Sensoren (bzw 1 3D Hallsensor), sowie Rotation um X und Y Achse über einen MPU-6050. Zudem kommt oben noch ein Knauf drauf, der sich mit Hilfe eines Kugellagers drehen kann (geplant ist NUR die Seitenwand zu rotieren) um Rotationen um die Z Achse zu erkennen. Gelesen werden die über 2 Hallsensoren und im rotierenden Bereich Nord-Süd-alternierend angebrachte Magnete. Wie würdet ihr hier noch die Z-Translation unterbringen? Im Prinzip wäre es im Knauf oder an der Basis möglich. Aber wie könnte ich das realisieren ohne Probleme mit evtl. Verkannten zu kriegen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.