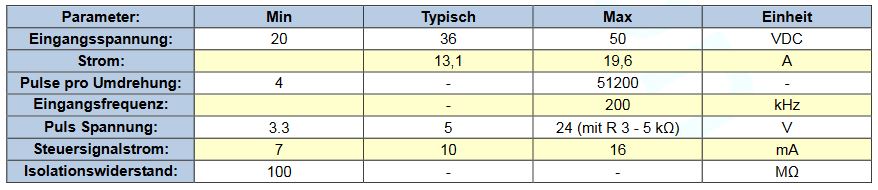
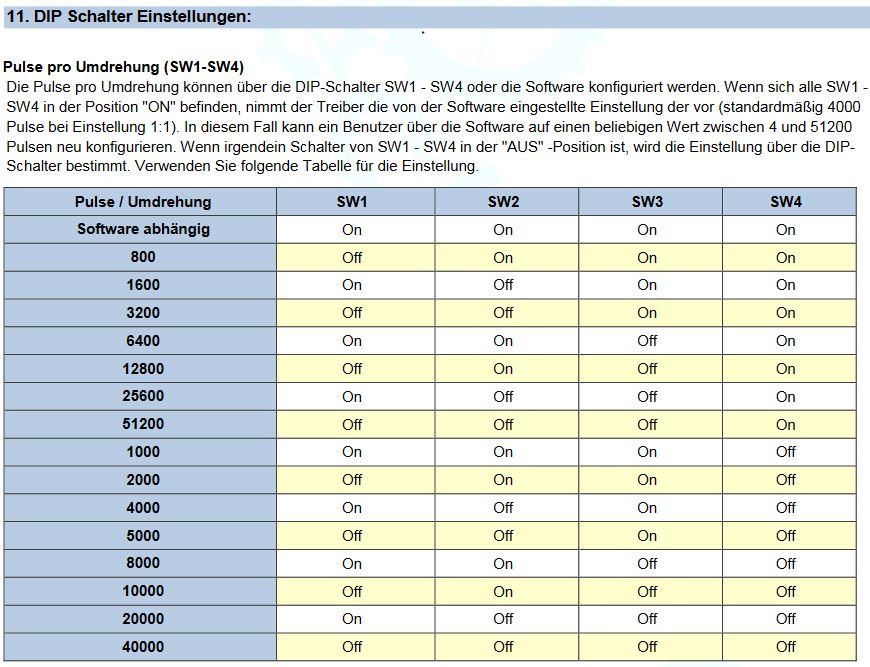
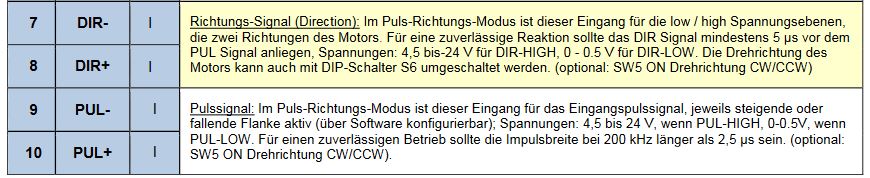
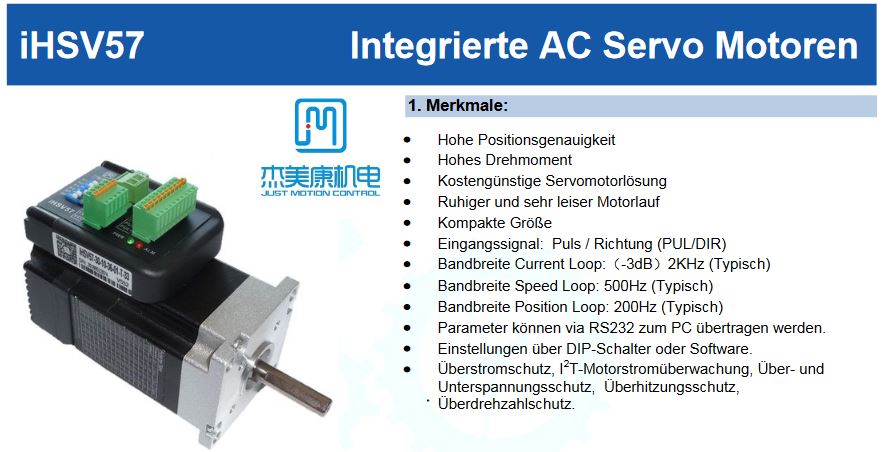
Hallo zusammen, ich habe eine Frage zur Ansteuerung von Schrittmotoren, bei denen die Treiberelektronik ein Step/Dir Signal will. Ich will die Ansteuerung erstmal mit nem Arduino testen, bevor ich das in ein größeres Projekt einbette. Ich hab die meines erachtens wichtigsten Stellen im Datenblatt des Steppers hochgeladen. Dazu ein paar Fragen: Das Step Signal ist im Wesentlichen ein PFM-Signal, oder? Da ich das Ganze zu Testzwecken erst mit einem Arduino machen will, kann man das mit der Tone Funktion generieren, oder? Die eigentliche Frage die sich mir aber stellt, ist, wie ich die Drehfrequenz des Steppers aus der Freqeunz meines Tone bzw. PFM-Signals berechne? Wenn ich beispielsweise die Schalter (siehe Bild DIP-Schalter Einstellungen) so stelle, dass sich ein Pulse/Umdrehung = 3200 ergibt und ich eine PFM Frequenz von 1kHz einstelle, ergeben sich dann 3200/1000 = 3,2 Umdrehungen pro Sekunde? Oder bin ich da auf der völlig falschen Fährte? Sorry für meine Unwisseneheit und schon mal Danke im Voraus!
Angehängte Dateien:
-

Daten_Stepper.JPG
45 KB -

DIP-Schalter_Einstellungen.JPG
120 KB -

DIR_Puls.JPG
61 KB -

Stepper.JPG
83 KB
Also wenn Du den Motor einfach nur bei einer bestimmten
Drehgeschwindigkeit laufen lassen willst, sollte die Tone-Funktion
gehen.
Wenn Du präzise eine bestimmte Position anfahren willst dann wirds
schwer.
Ein StepperDriver erwartet folgendes:
Dir: Low / High Pegel für Rechts bzw. Links
Enable: Selbsterkärend
Step: Für jede High-Flanke dreht der Motor je einen Step.
Wenn Microstepping aktiviert ist eben Fraktal eines Steps.
Dem Stepperdriver ist es im Prinzip völlig egal was du da machst am Step
Eingang, Hauptsache das Signal wechselt von Low auf High und wieder
zurück.
Abhängig von den technischen Rahmenbedingungen könntest du bei zu hohen
Frequenzen ans Limit kommen. Da hilft es dann das Microstepping
niedriger zu setzten und den Strom rauf.
Viele Grüße
felix schrieb: > kann man das mit der Tone Funktion generieren Es gibt fertige Schrittmotorbibliotheken für Arduino, wie AccelStepper.
Es gibt doch libraries für sowas, z. B.: https://github.com/risitt/kissStepper Es ist zwar der JMC Servo nicht aufgeführt, aber ich denke mal damit gehts auch?!
Danke für die Antworten, hat mir sehr weitergeholfen! Die AccelStepper Bibliothek ist für meine Anwendung wahrscheinlich das richtige!
Der Unterscheid zwischen Ton und Stepper ist, dass man fuer Stepper die Schritte zaehlen muss um eine Position anzufahren. Und dann sollte man die Drehzahl in einer Rampe hochfahren, sont koennen Schritte verloren gehen. Und dann sollte man den Strom ueberwachen. zB kann man den Strom erniedigen, wenn der Motor steht. Ich verwende deshal eine Trinamic Serie von intelligenten Stepperantrieben, die machen das alles fuer mich.
Das ist ja kein Schrittmotor, das ist ein Servo mit einer bereits integrierten closed-loop steuerung...das heisst der dürfte eigentlich keine "Schritte" verlieren
Pandur S. schrieb: > Und dann sollte man die Drehzahl in einer Rampe hochfahren, > sont koennen Schritte verloren gehen. Das hast du hübsch ausgedrückt. So ein normaler Schrittmotor bleibt beim Loslaufen nach dem ersten Schrittverlust einfach stehen und vibriert dann ziemlich lautstark. Erst, nachdem man ausreichend weit mit der Schrittfrequenz runter gegangen ist, bekommt man ihn wieder zum drehen. > Und dann sollte man den Strom ueberwachen. Bei modernen Schrittmotortreibern ist das überflüssig und langweilig, weil die mit einer Stromregelung arbeiten. Aber der iHSV57 ist sowieso kein Schrittmotor
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.