Guten Morgen, ich bin derzeit auf der suche nach einen BLDC-Controller mit dem ich relativ einfach bei einer 1 an einem Eingang mit 100% fahre und bei einer 0 mit 0%. Ob es jetzt TTL oder 0 / 10V am Eingang sein müssen ist mir erstmal egal. Ich habe zwar bei Google gesucht, aber dort werden mir fast nur Chinabomber ausgespuckt und die kommen für mich nicht infrage. Ich habe bei Nanotec den CSL3-24 gefunden, der entspricht eigentlich genau meinen Anfroderungen, nur die Verfügbarkeit ist halt....naja. Ein maximaler Strom von 3A und 24V wären so meine Anforderungen. Und eine möglichist kleine Bauform. Ich kenne nicht viele Hersteller die auch Controller anbieten deswegen woltle ich mal hierfragen. Selber entwickeln und bauen habe ich leider keine Zeit bzw auch das Wissen für... Dankö
Schau halt mal nach Modellbau Brushless Regler mit 8S Eingang.
Ach Jakob, es gibt so viele Varianten, mit Hallsensoren um Drehmoment auch beim Anfahren zu bekommen oder BackEMF wenn der Motor keine Last im Anlaufmoment hat, 3A pro Wicklung oder Gesamtstromaufnahme für alle 3, Rückspeisung oder Vernichtung der Antiebsenergie beim Bremsen, Drehzahlregelung im Chip z.B. quartzgeregelt oder extern, und was soll bei einem BLDC überhaupt 100% sein, mit steigender Drehzahl nimmt das Drehmoment ab. Deine 'Anforderungsliste' ist also nix wert, vermutlich fehlt noch 'so billig wie möglich und in 1 Tag geliefert'.
Angehängte Dateien:
-

bldcdriver.jpg
66 KB -

IMG_2290.jpg
240 KB
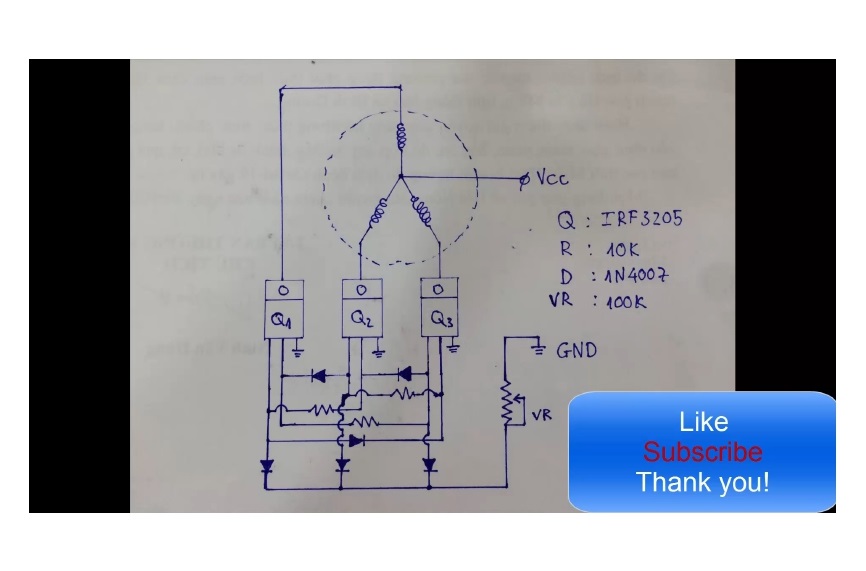

Hallo, ich habe einen sehr übersichtlichen Treiber mit Blockkommutierung aus einen Youtube Video nachgebaut. Ich hänge das Bild mal an. Mit einem Gekauften BLDC läuft der Treiber tadellos. Mit meinem ersten eigenen BLDC wackelt der Motor nur hin und her. Beide Motoren sind in Stern gewickelt mit einem Leiter am Sternpunkt zu VCC Bei meinem BLDC sind die Windungen alle im Uhrzeigersinn erfolgt. 0,3mm Kupfer mit jeweils 200 Windungen. Widerstand aller drei Wicklungen zum Sternpunkt ist 2,5 Ohm (Beim gekauften BLDC 4,5 Ohm). Die Wicklungen sehen den einen Rotormagenten als Nord und den anderen als Süd. Die Magneten Sind sehr stark. Der Kunstoff schirmt den Magnetismus schon etwas ab aber die Spitze der Schrauben auf der die Windung sitzt endet direkt vor den Magneten. Kann jemand auf den ersten Block sehen was ich falsch mache?
Dob S. schrieb: > Mit meinem ersten eigenen BLDC wackelt der Motor nur hin und > her. Das ist der mit den drei Spulen aus dem zweiten Bild? Da sind viel zu wenig Pole drauf. Das bringst du höchstens zum laufen, wenn du die Endstufen fremd erregst. Die Simpelschaltung schafft es nicht, so grosse Sprünge zu machen. Der fertige BLDC hat sicher viel mehr Pole und deswegen ist es leichter, von Sektor zu Sektor zu springen.
Matthias S. schrieb: > Der fertige BLDC hat sicher viel mehr Pole und deswegen ist es leichter, > von Sektor zu Sektor zu springen. Vielen Dank für deine Antwort. Mit Pole sind die Magneten am Rotor gemeint, richtig? Der Gekaufte hat 6 Windungen und 4 Pole. Ich habe noch kleinere Magneten dann versuche ich mal einen Rotor mit 6 oder 8 Polen zu bauen. Könnte es auch etwas helfen die Schaltung durch geeignete Kondensatoren zu erweitern?
Diese schaltung schafft es nur die spulen in eine richtung zu bestromen, ein normaler bldc kann beide richtungen. Trotzdem sollte das laufen wenn du die startphase hinkriegst. Sind die magnete in gleicher richtung eingebaut? Versuch den mal unter strom von hand zu starten. Wenn's nicht klappt einen magneten umdrehen. Da wäre übrigens ein schönes projekt für einen arduino. 3 mal pwm ausgeben, mit ramp-up drehzahl für startphase. Später kannst du noch hall sensoren zur positionserkennung dazumachen.
Joggeli schrieb: > Diese schaltung schafft es nur die spulen in eine richtung zu bestromen, > ein normaler bldc kann beide richtungen. Trotzdem sollte das laufen wenn > du die startphase hinkriegst. Sind die magnete in gleicher richtung > eingebaut? > > Versuch den mal unter strom von hand zu starten. Wenn's nicht klappt > einen magneten umdrehen. > > Da wäre übrigens ein schönes projekt für einen arduino. 3 mal pwm > ausgeben, mit ramp-up drehzahl für startphase. Später kannst du noch > hall sensoren zur positionserkennung dazumachen. Mit Arduino würde das gut funktionieren, das stimmt, das werde ich auch probieren sobald das Analog läuft. Hier ist übrigens der Link falls jemand mal Interesse hat das ebenfalls nachzubauen. https://www.youtube.com/watch?v=lLrBrZaBweo Ich brauche erstmal nur eine Richtung, der Motor läuft nicht egal wie ich die Magnete anordne, auch nicht wenn ich von Hand nachhelfe.
Jakob schrieb: > Selber entwickeln und bauen habe ich leider keine Zeit bzw auch das > Wissen für... Dann lass es von einer Fachfirma entwickeln. Wird wohl einige tausend Euro kosten. Oder lass es bleiben.
Dob S. schrieb: > der Motor läuft nicht egal wie > ich die Magnete anordne, Du bist dir bewusst dass in deinem fall beide magnete gleiche richtung haben müssen, bei beiden N aussen oder bei beiden S aussen? Wenn du ein N und ein S aussen hast wird das nur wackeln. Ein schwungrad hast du dran?
Jakob schrieb: > Chinabomber ... kommen für mich nicht infrage. > bei Nanotec den CSL3-24 gefunden, der entspricht eigentlich genau > meinen Anfroderungen Nanotec ist eine chinesische Firma.
Dob S. schrieb: > Mit Pole sind die Magneten am Rotor gemeint, richtig? Nicht nur. Spulen sind da auch mehr. Deswegen hat ja z.B. dein fertiger BLDC 6 Spulen. Ich habe hier welche mit 9 oder 12. Der grosse 4kW Radnabenmotor aus dem EMaxx Scooter hat z.B. 48.
Joggeli schrieb: > Dob S. schrieb: > >> der Motor läuft nicht egal wie >> ich die Magnete anordne, > > Du bist dir bewusst dass in deinem fall beide magnete gleiche richtung > haben müssen, bei beiden N aussen oder bei beiden S aussen? Wenn du ein > N und ein S aussen hast wird das nur wackeln. > > Ein schwungrad hast du dran? Ich probiere es gleich nochmal zur Sicherheit mit gleicher Magnetausrichtung. Ich habe mich nach diesem Rechner hier gerichtet. http://bavaria-direct.co.za/scheme/calculator/ Ich habe kein Schwungrad dran, aber ich habe dicke Stahlscheiben hier, die dafür gedacht sind, aber dafür muss ich den Motor etwas vergrößern. Wenn es von hand nicht geht, wird es wohl auch nicht nur an dem Schwungrad liegen denke ich.
Angehängte Dateien:
-

IMG_2291_1.jpg
240 KB

Matthias S. schrieb: > Dob S. schrieb: >> Mit Pole sind die Magneten am Rotor gemeint, richtig? > > Nicht nur. Spulen sind da auch mehr. Deswegen hat ja z.B. dein fertiger > BLDC 6 Spulen. Ich habe hier welche mit 9 oder 12. Der grosse 4kW > Radnabenmotor aus dem EMaxx Scooter hat z.B. 48. Achso, Also ich habe extra die minimum Anzahl an Windungen und Magneten gewählt, weil mir das Wickeln dann zu komplex wird. Beim ersten Versuch wollte ich es einfach halten. Im Anhang der gekaufte BLDC. N Der Rotor ist S S N Und es sind dort 6 Wicklungen zusehen. Das läuft Prima. Ich denke an meiner eigenen Variante habe ich auch noch Platz für drei weitere Spulen.
Jakob schrieb: > ich bin derzeit auf der suche nach einen BLDC-Controller mit dem ich > relativ einfach bei einer 1 an einem Eingang mit 100% fahre und bei > einer 0 mit 0%. Ob es jetzt TTL oder 0 / 10V am Eingang sein müssen ist > mir erstmal egal. Infineon IMC101T-T038 Das Teil kann unwahrscheinlich viel, aber eben auch im einfachsten Fall eine simple An/Aus-Steuerung, sogar wahlweise über zwei verschiedene Mechanismen, GPIO oder Analogwert (zum gewünschten An/Aus-Verhalten müssen dann halt zwei passende Analogwerte angelegt werden). > relativ einfach Naja, vor der Steuerung steht natürlich erstmal die Parametrierung des Chips. Infinion liefert die Software dafür kostenlos und diese Software enthält auch eine ziemlich umfassende Anleitung in Form eines Assistenten-Systems. Was du allerdings selber machen musst, ist die Ermittlung der Motorwerte. Das kann dir keine Software der Welt abnehmen.
Ich bin mir nicht sicher wie die elektronik genau läuft. Falls diese die back-emf zur synchronisierung braucht musst du 4 magnete haben, NSNS. 3 Spulen sind OK. Das video sieht so aus als sei das synchronisiert. Vielleicht kann ein pro die schaltung analysieren?
Hmmm... schrieb: > Ich bin mir nicht sicher wie die elektronik genau läuft. Falls diese die > back-emf zur synchronisierung braucht musst du 4 magnete haben, NSNS. 3 > Spulen sind OK. Alles klar, ich Drucke den Rotor gerade mit 4 Magneten. Währenddessen versuche ich die Anordnung der Magneten zu verstehen. Ich habe 3 Wicklungen, alle im Uhrzeigersinn, bedeutet das nicht das alle Wicklungen entweder Norden ODER Süden zum Rotor sind? Demnach müsste dann der Rotor auch nur Norden oder Süden nach Außen sein, oder nicht? Anders gesagt wenn alle Wicklungen in der gleichen Richtung gewickelt sind müsste dann doch der Rotor auch einheitlich sein. Ich check es noch nicht so ganz.
Das hab ich auch länger experimentiert bis ich das halbwegs verstanden habe. Wenn eine EISENLOSE spule strom hat wird sie N anziehen und S abstossen. Wenn du den strom umdrehst wird sie S anziehen und N abstossen. Mit eisenkern verfälscht sich das, das eisen wird sowohl N wie auch S anziehen. Die eisenanziehung und die stromwirkung summieren sich dann auf. Bei deinen 3 eisen spulen mit 2 magneten wird das rastmoment sehr gross sein. Vielleicht braucht deine elektronik aber die back-emf zur kommutierung, deshalb würde ich SNSN rotor verwenden. Wenn das läuft kannst du die konfiguration ja ändern und berichten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.