Hallo,
Problem:
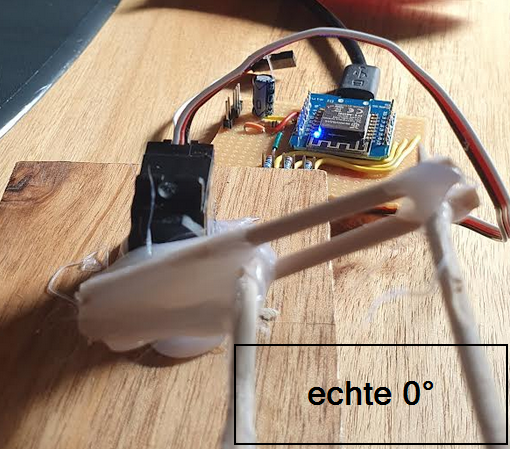
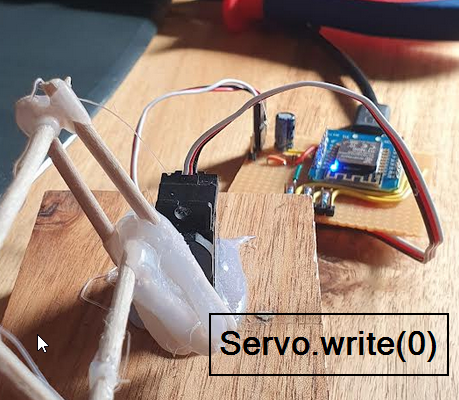
mein Servo an zwei D1 Mini stellt sich nicht auf 0 - circa 90°.
servo.write(0); stellt sich auf etwa 90 'echte' Grad.
Infos:
1. Ich habe den Aufbau aus den Bildern mit einem zweiten D1 Mini an
einer Steckplatine nachgebaut und den Fehler reproduziert (Bild anbei).
An der Verlötung liegt es nicht.
2. Ich habe den Servo mal von dem Holz runtergeholt und von
servo.write(0) - servo.write(180); durchlaufen lassen: dann bewegt er
sich von etwa 90 bis 180°.
3. Wenn der D1 Mini von der IDE neu beschrieben wird und der Servo am
Controller hängt, fährt der Servo für einen Moment auf echte 0°
(vermutlich reseten sich da die Pins oder so...).
4. Ein Offset würde ich ausschließen. Dazu unten mein Testcode. 180° und
160° werden super unterschieden.
5. Frage: was zur Hölle? :D Was soll ich messen? Ich hab ein Multimeter.
Thomas B. schrieb:> Was soll ich messen?
Die Pulsdauer des High-Impulses des PWM-Signals musst du messen.
Dort drin steckt die für die Position nötig Information.
> Ich hab ein Multimeter.
Tja, nur ein Hammer, wo ein Schraubendreher nötig wäre.
Ohne Oszilloskop kannst du nichts sinnvolles messen...
BTW: mit den [c] Tokens gibts Syntax Highlighting gratis dazu.
Thomas B. schrieb:> 5. Frage: was zur Hölle? :D Was soll ich messen? Ich hab ein Multimeter.
Das Signal, was du zum Servo schickst. Alleine mit einem Multimeter ist
das schwierig.
Lothar M. schrieb:> Ohne Oszilloskop kannst du nichts sinnvolles messen...
Unfug, ein Logikanalysator für den Gegenwert von zwei Kantinenessen
würde schon sehr viel weiter helfen.
Wolfgang schrieb:> ein Logikanalysator für den Gegenwert von zwei Kantinenessen würde schon> sehr viel weiter helfen.
Klar, geht auch.
Und im Gegenwert eines Adaptersteckers plus Spannungsteiler gibt es das
Soundkartenoszilloskop: https://www.zeitnitz.eu/scope_de
Allerdings bringt so ein richtiges Oszi noch die Möglichkeit mit sich,
die Signalqualität reproduzierbar und auf mehr als 1 Bit genau
beurteilen zu können.
Schonmal vielen Dank für eure Zeit und Antworten. Die [c] Tokens habe
ich angesehen und verstanden. Danke für den Tipp!
Danke auch für beide Hardwareempfehlungen. Unabhängig von dem aktuellen
Problem sind das wahrscheinlich praktische Tools für die Zukunft.
---------------------------------------------
Unabhängig vom Messen denke ich aber, dass EAF wohl Recht hat.
Habe eben mit einem dritten D1 getestet und sowohl den, als auch den
zweiten an 3.3V gehängt. Immer das selbe Ergebnis.
Ich recherchiere dem nach. Das klingt nämlich verdammt schlüssig.
Vielen Dank! Ich melde mich.
Offensichtlich Philipp. Und was ist daraus die praktische
Schlussfolgerung? Wo liegen denn die 'echten 0°'? ^^
Ich verstehe nicht, was du sagen möchtest, danke dir aber für deinen
Beitrag.
Thomas B. schrieb:> Danke auch für beide Hardwareempfehlungen. Unabhängig von dem aktuellen> Problem sind das wahrscheinlich praktische Tools für die Zukunft.
Die Zukunft ist JETZT - ist die Bestellung schon raus? ;-)
Mikrocontroller mit externen digitaler Peripherie ohne LA ist tappen im
Dunkeln.
funktioniert "servo.writeMicroseconds(Wert)" bei Dir?
writeMicroseconds(Wert)
Sendet den angegebenen Wert an den Servo. Meistens wird dadurch der
Schaft des Servos an eine bestimmte Position bewegt. Bei Standard-Servos
mit Hebel bedeutet ein Wert von 1000 das eine Ende, 2000 das andere und
ein Wert dazwischen ein entsprechender Winkel (1500 sind dann ungefähr
die Mitte). Beispiel: servo.writeMicroseconds(1200)
Mario P.
Hi Mario,
writeMicroseconds() bringt das identische Ergebnis zu write(). Da deckt
er nur die 90 - 180° ab.
Der Servo ist ein Reely S-7361, den ich mal bei Conrad im Laden gekauft
habe. Ein Datenblatt hat mir das Internet nicht ausgespuckt.
Bishr bestes Ergebnis:
Ein bisschen abgewandelt von EAFs Tipp
(https://github.com/sarincr/ESP8266-Arduino-IDE/blob/master/12.Servomotor/12.Servomotor.ino)
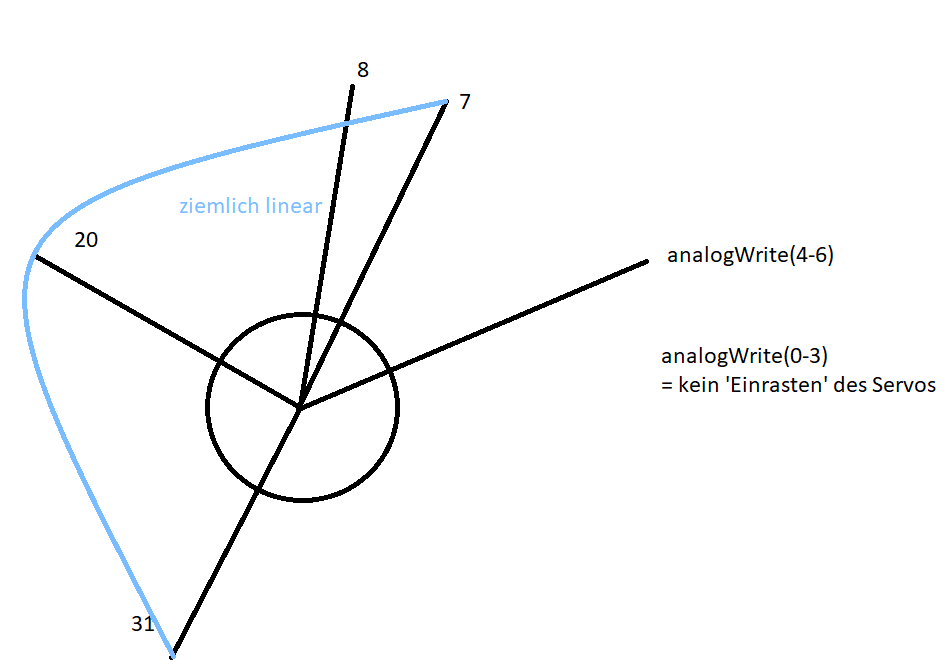
bringt mir das hier aktuell die ganze Range. Allerdings rastet der Servo
bei 0 - 3 nicht ein.
(vergleiche Bild im Anhang)
kann man schön rumspielen.
Je größer hier die Zahl, desto größer wird die Range einstellbarer
Punkte.
Mit analogWrite(360) kann ich Werte von analogWrite(45) bis
analogWrite(225) fahren und habe die oben gezeichneten Anschläge.
Allerdings 'bounced' der Servo noch zurück. Wenn ich z.B.
analogWrite(170) mache, dann fährt er dorthin, schlägt an und fährt dann
ein kleines Stück zurück, so, als würde er dort abprallen.
Es ist verrückt. Ich verstehe aber halt auch gar nichts von Servos und
Elektrotechnik, wie ihr vermutlich ja schon bemerkt habt :)
Ich muss mir das mal detaillierter zu Gemüte führen.
Ein Logikanalysator ist jedenfalls ganz schön teuer und braucht viel
Platz. Weiß nicht, ob ich sowas will.
Thomas B. schrieb:>> analogWriteFreq> Je größer hier die Zahl, desto größer wird die Range einstellbarer> Punkte.
Im Prinzip eine gute Idee.....
Nur dass der Servo es gerne im 20ms Raster haben möchte.
Aus der Ecke machen die 50Hz durchaus Sinn.
Thomas B. schrieb:> Ein Logikanalysator ist jedenfalls ganz schön teuer und braucht viel> Platz. Weiß nicht, ob ich sowas will.
10 Euronen für deinen Zwecke, ca so groß wie eine Streichholzschachtel.
Was meinst Du mit "einrasten" des Servos?
Wenn das Servo dort zappelt oder nicht zur Ruhe kommt, bist Du am
mechanischen Anschlag des Servos. Ein Betrieb des Servos dort beschädigt
das Servo.
Mario P.
Also erstmal muss ich sagen, dass ihr ne ziemlich tolle Community seid.
Danke für den Support und die Ideen.
Nach dem Logikanalysator schau ich nochmal genauer. Mein Multimeter ist
ein MT-52 Voltcraft. Hab's erst seit gestern.
Die Standard Servo Lib hab ich zum Laufen gebracht. Jetzt kann ich die
vollen 180° ausnutzen.
Einzig und allein 'bounced' der Servo noch. D.h. im Detail, dass er über
das Ziel hinausschießt und dann langsam zurückfedert auf die korrekte
Stellung.
(Mit dem Einrasten meinte ich, dass der Servo, wenn er einen validen
Befehl bekommen hat, sich feststellt - sich also nicht mehr von Hand
durch sanftes Drehen bewegen lässt. Ich denke, das ist, wie es sein
soll. Oben in der Paintzeichung ist aufgeführt, dass er eben bei 0 - 3
nicht 'einrastete', also scheinbar keine Befehle bekommt. Ist
mittlerweile ja aber nicht mehr relevant).
Ich muss mich jetzt mal dringend ins Bett legen. Ich hab Kopfschmerzen
des Zorns. Ich schau morgen wieder in den Thread.
Vielen Dank euch allen.
Update:
ich konnt's nicht verheben und hab's einen anderen Servo rausgekramt.
Ein SM-2309S
1
servo.attach(D4,540,2400);
erledigt den Zaubertrick, wenn man mit der Standard <Servo.h> Lib
arbeiten will. Ohne die Min/Max Parameter für die attach() bewegt sich
auch der SM-2309S nur um 90°.
Das "Bouncen" mach der zweite Servo nicht. Da ist alles gut.
Ich halte das Thema für erledigt.
Tausend Dank euch allen, hab ne Menge gelernt.
Es ist schön, wenn Du es so zum Laufen bekommen hast.
Die weiteren Parameter zu servo.attach() für die maximale und minimale
Impulslänge und den zugehörigen Winkelstellungen wären jetzt auch meine
nächsten Empfehlungen gewesen;
MT-52 Voltcraft:
Meine Frage nach dem MM hatte den Hintergedanken, ob Du damit die
Widerholfrequenz des Signals und dann die Pulslänge als den relevanten
Wert für die Winkelvorgabe hättest ermitteln können:
- Frequenzmessung ist möglich - die Wiederholrate des Pulses für das
Servo (standard: 20ms, bei Digitalservos auch weniger; genauer Wert aber
unkritisch)
- Pulslängenmessung ist leider nicht möglich - die Winkelinformation
steckt in der Pulslänge
Die Mittelstellung des Servos ist standardmäßig wie in
Beitrag "Re: D1 Mini: Servo.write(0) stellt den Servo nicht auf 0"
anegeben bei 1500µs.
Im Modellbau werden mit den Servos meist Gestänge bewegt. Daher werden
dort nur Winkel im Bereich von -45°...0°...+45° genutzt. Bei größeren
Winkeln werden die entstehenden Hebelverhältnisse deutlich ungünstiger
bis unbenutzbar.
Die -45° werden standardmäßig bei einer Pulslänge von 1000µs erreicht,
die +45° bei einer Pulslänge von 2000µs (soweit die Theorie, wenn
Bauteiltoleranzen und andere Einflüsse außer Acht gelassen werden).
Diese Werte passen recht gut zu Deinen letzten Werten in
Beitrag "Re: D1 Mini: Servo.write(0) stellt den Servo nicht auf 0".
Thomas B. schrieb
> sich also nicht mehr von Hand durch sanftes Drehen bewegen lässt
In diesem Fall registriert der Sensor für die Winkelstellung im Servo
deren Änderung durch das von außen am Servo angreifende Drehmoment. Über
die Servoelektronik wird dadurch der Motor aktiviert, um diesen
Winkelfehler wieder zu beheben. Das äußert sich dann im Drehmoment, das
von außen zum Bewegen des Servos benötigt wird. Du arbeitest also gegen
das Drehmomemt des Servomotors. Das fühlt sich dann für Dich wie ein
"Einrasten" an.
Thomas B. schrieb
> Oben in der Paintzeichung ist aufgeführt, dass er eben bei 0 - 3> nicht 'einrastete', also scheinbar keine Befehle bekommt.
Deine Impulslängen und damit die Soll-Winkelstellung kommen nach wie vor
an. Der Erfassungsbereich des Winkelsensors ist dort aber überschritten
und er liefert in diesem Winkelbereich keine gültigen Daten mehr.
Winkeländerungen durch äußere Drehmomente können also nicht erkannt
werden. Entsprechend wird auch nicht der Servomotor zu deren
Rückstellung aktiviert.
Mario P.