Hallo zusammen, ist bastle mir gerade einen Allrad-Rover, der irgendwann mal autonom als Rasenmäher die Hänge hoch und runter fahren soll. Komme selbst eher von der Software-Seite. In die Elektronikthemen des Projekts muss ich mich sehr mühsam einarbeiten, daher frage ich euch mal: Kernkomponenten des Rovers - Antrieb sind vier Hoverboard BLDC Motoren (je 250W) - Steuerung der Motoren erfolgt über die Hoverboard Platinen - Energie liefern drei 36V 4,4Ah Akkus - Der Rover transportiert eine 40V Akkurasenmäher, im Moment mit eigenem Akku. (Der soll im Zielbild durch eine 36V Version ersetzt und auch an die Hauptakkus angeschlossen werden). Neben den Kernkomponenten kommt noch ein bisschen Peripherie dazu: - ESP32 mit Mobilfunk Modul - GPS Modul - In (ferner) Zukunft noch Lagesensoren, Kollisionserkennung, etc. Da plane ich mit maximal 10W bei 5V Betriebsspannung. Die Energie für die Peripherie wollte ich mir mittels eines Abwärtswandlers von den Hauptakkus holen. An sich ja kein Problem, DC/DC Wandler von 36V auf 5V gibt es ja genug. Das Problem: Die Motoren verursachen wohl Spannungsspitzen bis zu 120V. Und da gibt es Zweifel, dass der DC/DC Wandler das aushält, insbesondere bei denen vom Chinesen. Wenn aber der Wandler durchschmort und das GPS Modul kaputt geht, bin ich 250€ ärmer... Daher meine Fragen: 1. Seht ihr das mit den Spannungsspitzen genau so? 2. Könnt ihr mir einen DC/DC Wandler empfehlen, der das aushält ( und der nicht genauso viel kostet wie das GPS Modul). 3. Sollte ich zusätzlich vor und hinter dem Wandler noch Komponenten verbauen, um das Problem zu vermeiden. Welche? 4. Oder ist das alles zu kompliziert und ich sollte lieber eine separate Stromversorgung für die Peripherie nutzen. Vielen Dank im Voraus für eure Hilfe!
:
Verschoben durch Moderator
swhof123 schrieb: > drei 36V 4,4Ah Akkus Ergibt 3 x 36 x4,4 = 475 Wh, wenn das Bleiakkus sind, sind dann etwa 300 Wh nutzbar. Damit willst Du 4 x 250W Motore + den Rasenmaeher selbst betreiben?
swhof123 schrieb: > Das Problem: > Die Motoren verursachen wohl Spannungsspitzen bis zu 120V. Warum? Und warum kommen die bis zum DCDC? > Daher meine Fragen: > Seht ihr das mit den Spannungsspitzen genau so? Muss nicht sein, kommt auf die tatsächlichen Komponenten und die tatsächliche Verdrahtung und den gesamten Aufbau an. > lieber eine separate Stromversorgung für die Peripherie nutzen. Für die ersten Anläufe scheint mir das der allerbeste Ansatz zu sein. Und wenn du mal ein richtiges funktionierendes Gerät hast, dann kannst du ja einfach mitprotokollieren und Messen, was da tatsächlich passiert. Wendels B. schrieb: > Ergibt 3 x 36 x4,4 = 475 Wh, wenn das Bleiakkus sind, sind dann etwa 300 > Wh nutzbar. Dürften wohl schon Lipos sein. > Damit willst Du 4 x 250W Motore + den Rasenmaeher selbst betreiben? Mit 1kW im Antrieb rockt der Mäher aber ganz hübsch... Aber insgesamt erscheint mir die in den Akkus gespeicherte Energie für einen langfristigen Einsatz auch etwas gering...
:
Bearbeitet durch Moderator
Das sind die Hoverboard Li-Ion Akkus. Und ja, das funktioniert. Mit den 3 Akkus fährt das Ding im Moment schon ganz gut. Der fährt ja nicht auf Volllast und bergab lädt er wieder auf. Für den Rasenmäher müssten natürlich noch ein bis zwei Zellen mehr dazu.
Ich, für meinen Teil, dachte eben, dass gerade der GPS-Empfänger das preiswerteste Modul von allen verbauten Komponenten sei. Vllt. kann man sich hier um Alternativen bemühen, die das ganze nicht so hochkritisch erscheinen lassen. Ich hatte letztens etwas zu Zwischenkreisspannung gelesen und dass man die daher ordentlich Puffern soll, um die Spannungsspitzen nicht zu sehr ansteigen zu lassen. Da bin ich aber nicht tief genug im Thema drinn.
swhof123 schrieb: > Seht ihr das mit den Spannungsspitzen genau so? BLDC sind eigentlich harmlos. Der Akku direkt an den Klemmen filtert gut. (Wenn man natürlich erst 1m dünnes Kabel zur BLDC Elektronik fuhrt und da dran die Quelle des step down anschliesst, kann es gestörter sein). Und ein Filter kann viele Störungen abblocken, ein RC Filter, LC Filter oder gar Diode, Widerstand, Elko, TVS Diode, Drosselspule. Einen etwas robusteren DC DC, z.B. XL7005 mit 80V, reicht sicherlich.
swhof123 schrieb: > - Antrieb sind vier Hoverboard BLDC Motoren (je 250W) > - ESP32 mit Mobilfunk Modul Ooh, Du willst Deinen Rasen im 30km/h Tempo mit Steuerung per Handy aus Deinem Urlausort mähen?
Tobi schrieb: > Harald W. schrieb: >> im 30km/h Tempo > > Wie kommst du auf sowas? Naja, 1kW reicht für Mopedgeschwindigkeit.
Axel R. schrieb: > Ich, für meinen Teil, dachte eben, dass gerade der GPS-Empfänger das > preiswerteste Modul von allen verbauten Komponenten sei. Das kommt wohl drauf an, ob es auf 3 Meter oder auf 1 Zentimeter genau arbeitet.
Harald W. schrieb: > Tobi schrieb: >> Harald W. schrieb: >>> im 30km/h Tempo >> >> Wie kommst du auf sowas? > > Naja, 1kW reicht für Mopedgeschwindigkeit. Dann montier an Dein E-Bike wenigstens noch einen Balkenmäher, und steuere beides (fern) auf bis zu 50, 60 (lieber 70)% Steigung. Schon bist Du schlau genug zum Thema, (sowas) nicht zu schreiben.
Angehängte Dateien:

Ihr seid ja ein lustiger Haufen. Ich versuche mal ein paar der Rückmeldungen zu beantworten. Aber zunächst eine Bitte: Könnte bitte jemand das Thema dieses Threats mal anpassen. z.B. so: "Spannungsspitzen bei elektrischem Rover abfangen um empfindliche Elektronik zu schützen." Ich hatte als Gast gepostet, den Betreff vergessen fertig zu schreiben und kann nun keinen Knopf zum Editieren finden. Die starke Motorisierung hat was mit der Antriebskraft am Berg und dem hohen Schlupf auf Gras zu tun. Die Variante mit zwei angetriebenen Rädern hat auf dem Testgelände versagt. In der Allradkonfiguration geht's jetzt. Das Ding könnte eine ziemliche Rakete sein, allerdings ist die Höchstgeschwindigkeit der Motor Controller aktuell auf 3km/h begrenzt. Aber das 10 fache wäre technisch möglich. Da ich so langsam fahre, reicht die Batterie auch länger. Ich hab Hoverboard Motoren aus zwei Gründen genommen: 1. die gibt es billigst gebraucht. 2. gibt es eine aktive Community für die Steuerungssoftware. Ich verwende z.B. https://github.com/EFeru/hoverboard-firmware-hack-FOC Als ferngesteuerte Variante fährt das Ding bereits seit letztem Sommer. Der ESP32 öffne ein Wlan und liefert eine Webseite, über die man den Rover steuern kann. Ist aber nicht wirklich das wahre, da die manuelle Steuerung zu ungenau ist - da bin ich mit dem Rasenmäher schneller. Mein Ziel für dieses Jahr ist, dass ich mit einem Bier im Garten sitzen kann, einen Totmannschalter in der Hand und der Rover unter Aufsicht selbstständig seine Runden dreht. Die Positionsdaten der Flächen, die er abfahren muss, kriegt er programmiert, den Weg zu den Flächen und darin berechnet er selbst. Dank GPS weiß er ja wo er ist. Als GPS kommt wie schon vermutet ein Board mit Zentimetergenauigkeit (https://www.ardusimple.com/product/simplertk2b-pro/) zum Einsatz. Das kostet dann ein paar Euros extra. Das Thema mit den Spannungsspitzen kommt aus der o.g. Community. Beim Bremsen wird Energie regeneriert und dabei wurden Spitzen bis 120V gemessen, da brennen auch regelmäßig Motor Controller Boards durch. Wobei die auch von Höchstgeschwindigkeit abbremsen. Vermutlich bin ich mit meinen 3km/h auf der sicheren Seite und sollte mir keine Gedanken machen. MaWin schrieb: > Der Akku direkt an den Klemmen filtert gut. > (Wenn man natürlich erst 1m dünnes Kabel zur BLDC Elektronik fuhrt und > da dran die Quelle des step down anschliesst, kann es gestörter sein). Die Wege sind kurz und die Kabel dick. > Und ein Filter kann viele Störungen abblocken, ein RC Filter, LC Filter > oder gar Diode, Widerstand, Elko, TVS Diode, Drosselspule. Wie würdest du so einen Filter aufbauen? Welche Teile genau? Für mich ist das immer Magie: Man verrühre drei Löffel Kapazität, eine Prise Induktion und das Haar von Herrn Ohm und schwups ist das Problem gelöst. > Einen etwas robusteren DC DC, z.B. XL7005 mit 80V, reicht sicherlich. Gibt's den XL7005 auch in einem fertigem Modul? Wobei ich bräuchte davon ja vier Stück um auf meine 10W Leistung zu kommen.
Habe bei Mouser dieses Teil gefunden und bestellt (https://www.mouser.de/ProductDetail/709-NSD10-48S5) Werde den Filter wie im Datenblatt beschrieben einbauen und hoffe damit alle richtig gemacht zu haben...
Georg S. schrieb: > Das Thema mit den Spannungsspitzen kommt aus der o.g. Community. Beim > Bremsen wird Energie regeneriert und dabei wurden Spitzen bis 120V > gemessen, da brennen auch regelmäßig Motor Controller Boards durch. Der Motor Controller arbeitet beim regenerativen Bremsen als Aufwärtswandler um die vom Motor generierte Spannung höher als die Akkuspannung zu bekommen. Durch den fliessenden Ladestrom wird der Motor gebremst. Je nach Mosfet Ansteuerung, Akkuladestand, Verkabelung und > Wobei die auch von Höchstgeschwindigkeit abbremsen. Vermutlich bin ich > mit meinen 3km/h auf der sicheren Seite und sollte mir keine Gedanken > machen. kann es zu erhöhten Spannungen kommen. Mit "langsamen" Bremsen aus "geringen" Geschwindigkeiten mit nicht voll geladenen Akkus sollte bei ordentlichen Controller, Firmware und Aufbau keine Problem zu erwarten sein...
Angehängte Dateien:
-

Schaltbild.jpg
18 KB
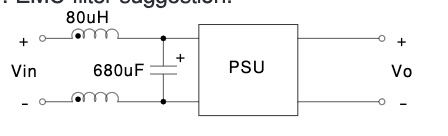
Mein NSD10-48S5 DC/DC Wandler ist mittlerweile da (Datenblatt https://www.meanwellusa.com/productPdf.aspx?i=112). Habe davor noch den im Datenblatt empfohlen EMC Filter eingebaut und auch am Output noch eine Kondensator. Ein Frage noch zum weiteren Aufbau: Wenn ich dem Schaltbild im Datenblatt folge, isoliert der DC&DC Wandler auch die Masse. In dem isolierten, 5V Bereich werkelt allerdings auch ein ESP32, der per UART Befehle an den Motorcontroller im 36V Bereich gibt. Hab das jetzt noch nicht ausprobiert, aber ohne gemeinsame Masse kann das doch nicht funktionieren, oder? Wenn ich eine gemeinsame Masse lege, torpediere ich dann mein ursprüngliches Ziel, die empfindliche Elektronik gegen Spannungsspitzen zu schützen? Was meinen die Menschen, die sich auskennen?
UART kann man mit 2 Optokopplern oder einem ADUM galvanisch trennen, dann muss man sich um die Masse keine Sorgen machen.
Spannungsspitzen vom Motor, durch den Regler bis zum DC/DC? Hmm...kann ich mir schlecht vorstellen. Das wäre ja dann ein generelles Problem im Modellbau. Hab ich noch nie feststellen können sowas. Schätze mal, die BLDC Regler auf der Hoverboard Platine sind Schrott, v. a. wenn die regelmässig durchbrennen. Vll. gehst von deinem 10S Antriebsakku runter auf 4S oder 6S, dann kannst Du normale billige Modellbau BLDC Regler nehmen, oder auch sowas: https://www.st.com/en/evaluation-tools/b-g431b-esc1.html Bei den Motoren könnte man noch hochpoligere nehmen, die machen weniger Drehzahl bei mehr Drehmoment, Du begrenzt ja eh auf 3 km/h. Dann hast Du unten rum mehr Kraft...die 250W/Rad wirst Du eh nicht brauchen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.