Hallo, ich wollte eine Art selbstgebaute Seilwinde bauen. Also ein Objekt (ca 3kg) an einer Schnur mit wenig Prozent Steigung entlang hochziehen und wieder loslassen. Das in Dauerschleife. Hierzu habe ich mir einen 5V 360° Servomotor mit 0,25N gekauft. Bei diesem kann ich die Geschwindigkeit und Richtung variieren. Dies löse ich mittels ESP Home Script auf einem Lolin D1 Mini. Der Motor treibt direkt eine Rolle mit 5cm Radius an. Die Zugkraft sollte also noch 5Ncm betragen, also 5kg ziehen können. Meine Kofferwaage zeigt eine benötigte Zugkraft von 1,5kg an. Leider ist der Motor dennoch zu schwach. Ich habe schon über einen Rollladenmotor nachgedacht. Da kann man allerdings die Geschwindigkeit nicht variieren. Vermutlich auch nicht für den Dauereinsatz konzipiert. Alternativ noch ein Scheibenwischermotor. Aber ob der mit meinem Setup kompatibel ist, weiß ich nicht. Hab ihr noch Tipps? Simpler Motor mit Geschwindigkeits- und Richtungswechsel über Microcontroller steuerbar und Leistung eventuell so bei 5NM aufwärts? Es darf auch mehr als 5V Anschluss sein. Gruß maxpd
0,25Nm entsprechen grob 25g an einem 1m langen Hebel. Dein Hebel ist ca. 1/20tel, also ca. 25*20= 500g Zugkraft bei 5cm Radius. Wer von uns beiden hat sich um 1:10 vertan? Nimm einen Modellbau-ESC, einen Bürstenmotor nach Wahl (viele Turns = hohes Drehmoment und Langsame Drehzahl), ein Vorschaltgetriebe auf deine Wunschgeschwindigkeit und eine Seilrolle. Viel Kraft, günstige Hardware, einfache Ansteuerung, lange Lebensdauer. Es gibt auch Windenservos mit vielen vielen Kilogramm Zugkraft, das geht auch.
Jens M. schrieb: > Es gibt auch Windenservos mit vielen vielen Kilogramm Zugkraft, das geht > auch. Oder man baut sich ein normales Servo entsprechend um, dass das eben 360° kann: https://www.electronicsplanet.ch/Roboter/Servo/hacking/servomotor-360-grad-mit-pwm.php Das billigste Standard Servo schafft deine 3 kg schon: https://www.reichelt.de/fr/de/servo-q4-standard-jamara-033217-p270932.html?PROVID=2788&gclid=EAIaIQobChMI1uvOtNbw-QIVWpBoCR19KAj8EAQYASABEgJyB_D_BwE&&r=1 Hier...immer noch billig mit 6 kg: https://www.reichelt.de/fr/de/standardservo-6-kg-analog-master-s4020-p226366.html?PROVID=2788&gclid=EAIaIQobChMI6LzF4Nbw-QIV7pBoCR3GQgE8EAQYASABEgIz4fD_BwE&&r=1
Angehängte Dateien:
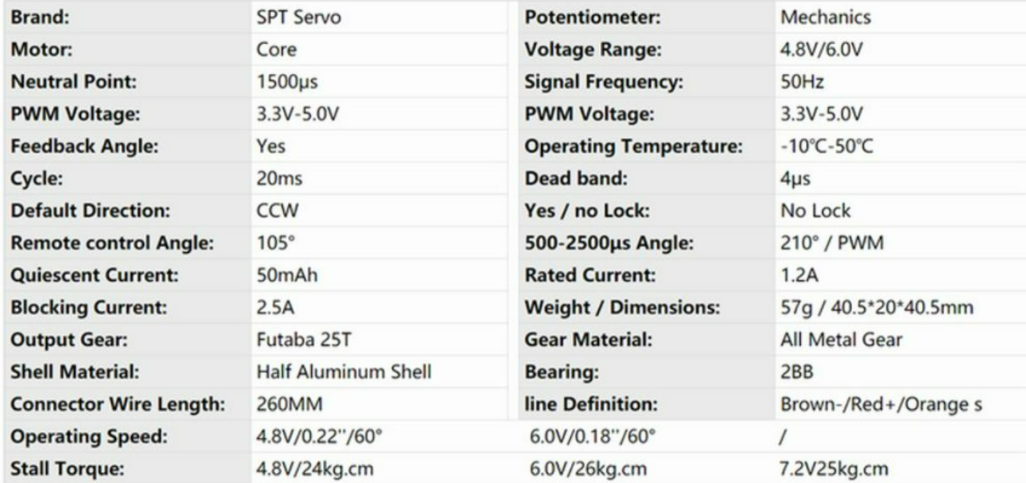
Jens M. schrieb: > 0,25Nm entsprechen grob 25g an einem 1m langen Hebel. > Dein Hebel ist ca. 1/20tel, also ca. 25*20= 500g Zugkraft bei 5cm > Radius. > Wer von uns beiden hat sich um 1:10 vertan? Ich :) Genau. Mit meinem Testobjekt von 1kg (benötigt 450g Zugkraft) bleibt er gerade so stehen. Angehangen noch die Werte von meinem Servo. Der sagt 24kg / cm. Daher kam ich auf 5kg bei 5 cm. Also 0,025Nm. https://www.amazon.de/Digital-Kontinuierliche-Rotation-Roboter-Schrauben/dp/B07T7TLX3P/ref=sr_1_16?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=3AY6WD9URW6JH&keywords=servo+25kg&qid=1661947008&sprefix=servo+25kg%2Caps%2C194&sr=8-16 Demnach müsste das doch eigentlich massig passen und ich mache etwas falsch? Getriebemotoren, Steppermotoren, Servomotoren haben alle ungefähr die gleichen Werte was Relation von Geschwindigkeit und Kraft angeht. Ich bin da mit meinem auch schon fast am Limit bei den kleinen Dingern.
:
Bearbeitet durch User
Mike M. schrieb: > Der sagt 24kg / cm. Daher > kam ich auf 5kg bei 5 cm. Also 0,025Nm. Da 1kg ca. 10N entsprechen, wärst du da bei 2,5Nm (24kg/100=240g), und das müsste weit ausreichend sein. Aber da gibts wie immer drei Problemchen: 1. sind das vermutlich Chinawerte. Kann man glauben, sollte man messen. b) Stall heißt nicht "Schafft er nicht mehr zu ziehen" sondern "aus vollem Lauf rennt er mit so viel gegen die Wand". Du versuchst damit zu starten, das wird oft nix. Keine Ahnung warum. III) Sicher, das dir nicht die Spannung wegsackt? Der Stecker des Servos ist nicht für hohe Ströme gemacht ("hoch" entspricht hier mehr als 1,5A), das Servo nimmt sich die aber sicher bei 24kgcm. Kann deine ganze Verkabelung 5A liefern? Ich hab Savöx-Servos im Auto, die reißen an 6V locker über 6A weg, drücken dann aber auch 2Nm/20kgcm, an 7,4V noch ein bissel weiter. Gut, unter 0,1s für 60° ist mehr als doppelt so schnell wie deins, aber nur als Idee...
Mike M. schrieb: > Dauerschleife Mike M. schrieb: > Vermutlich auch nicht für den Dauereinsatz konzipiert. Servos auch nicht. Schon konstruktionstechnisch nicht. Die erfassen ihre Position über ein Poti. Das ist zwar billig, aber bei jeder Fahrt wird etwas von der Widerstandsbahn abgetragen. Und irgendwann ist davon nichts mehr übrig und der Servo irrt orientierungslos hin und her. Nimm einen Schrittmotor. Wenn du den ausreichend dimensionierst und mit einer Rampe behutsam beschleunigst und abbremst, dann brauchst du die Position nicht überwachen, sondern nur eine Referenzfahrt machen. Idealerweise so, dass du den Endschalter im Betrieb gar nicht bestätigst. Der ist nur dazu da, beim Systemstart eine definierte Position zu haben. Die Ansteuerung geht mit AccelStepper auch relativ einfach. Bei Pollin gibt es einen Stepper von Nanotec für acht Euro und 0,79 Nm. Pololu hat dazu passende Treiber.
pegelwendler schrieb: > Servos auch nicht. Schon konstruktionstechnisch nicht. Die erfassen ihre > Position über ein Poti. Das ist zwar billig, aber bei jeder Fahrt wird > etwas von der Widerstandsbahn abgetragen. Und irgendwann ist davon > nichts mehr übrig und der Servo irrt orientierungslos hin und her. Die Position hätte ich gar nicht erfasst. Ich wollte die Zeit messen, die er für einen Lauf nach unten und für einen Lauf nach oben benötigt. Diese Zeiten hätte ich dann einprogrammiert. Ah Zusatzinfo: Wir sprechen hier über eine Distanz von 40 Metern. Eine Fahrtrichtung darf dabei gerne 3 Minuten dauern. > Nimm einen Schrittmotor. Wenn du den ausreichend dimensionierst und mit > einer Rampe behutsam beschleunigst und abbremst, dann brauchst du die > Position nicht überwachen, sondern nur eine Referenzfahrt machen. > Idealerweise so, dass du den Endschalter im Betrieb gar nicht > bestätigst. Der ist nur dazu da, beim Systemstart eine definierte > Position zu haben. > Die Ansteuerung geht mit AccelStepper auch relativ einfach. > Bei Pollin gibt es einen Stepper von Nanotec für acht Euro und 0,79 Nm. > Pololu hat dazu passende Treiber. Danke für das Konstrukt. Das hört sich komplex an. Muss ich mich erstmal einarbeiten. Aber wie Jens M. richtig berechnet hat, bin ich aktuell bei 2,5Nm. Das müsste ja dann auch massig langen, nur habe ich einen Fehler drin. Jens M. > Aber da gibts wie immer drei Problemchen: > 1. sind das vermutlich Chinawerte. Kann man glauben, sollte man messen. Man sieht den Servo öfters in RC Foren für Seilwinden und er wird für seine Kraft gelobt. Nehmen wir mal an, der schafft die 25kg > b) Stall heißt nicht "Schafft er nicht mehr zu ziehen" sondern "aus > vollem Lauf rennt er mit so viel gegen die Wand". Du versuchst damit zu > starten, das wird oft nix. Keine Ahnung warum. Ja, wie beim Auto. Man verbraucht gleich viel Power beim Anfahren im 1. Gang wie beim Halten der Geschwindigkeit im 5. Gang. > III) Sicher, das dir nicht die Spannung wegsackt? Der Stecker des Servos > ist nicht für hohe Ströme gemacht ("hoch" entspricht hier mehr als > 1,5A), das Servo nimmt sich die aber sicher bei 24kgcm. Kann deine ganze > Verkabelung 5A liefern? Ich arbeite mit einem Handynetzteil mit 2A. Ich habe dabei auch den Servo mit separater Stromzufuhr betrieben, um auszuschließen dass der Microcontroller eventuell nicht die volle Power durchschleift, an den der Servo sonst angeschlossen war. Also mal den Servo an ein Netzteil mit 5V aber auch ~5A testen? Wie viel Ampere Spitze schafft denn so ein RC Akku? Denn sonst habe ich keine 5V Netzteile zur Hand. > Ich hab Savöx-Servos im Auto, die reißen an 6V locker über 6A weg, > drücken dann aber auch 2Nm/20kgcm, an 7,4V noch ein bissel weiter. > Gut, unter 0,1s für 60° ist mehr als doppelt so schnell wie deins, aber > nur als Idee... Die Geschwindigkeit lässt sich ja drosseln (interessanterweise damit aber auch die Kraft. Wobei mit steigender Geschwindigkeit eigentlich die Kraft verloren geht. Verstehe ich nicht.) Kann es sein, dass ich für den Servo eventuell einen separaten Treiber abseits des Microcontrollers brauche?
Mike M. schrieb: > Also mal den Servo an ein Netzteil mit 5V aber auch ~5A testen? 5 oder besser 6V und meeeeeehr Amper. Skillen, Junge! :D Dicke, feste Verbindungen und Kabel machen was aus. Bei Handynetzteil denke ich erstmal an (ausgelutschte) USB-Stecker, weniger als 5V, lange dünne Strippen, gelogene Aufschriften auf Netzteilen und Schaltungen die 5V und 2A schaffen, aber nicht gleichzeitig! ;) Mike M. schrieb: > Wie viel Ampere Spitze schafft denn so ein RC Akku? Alle. Die sind nicht abgesichert oder begrenzt, meine popeligen 5,4Ah 2S sind für 150A Impulsbelastung spezifiziert, und die waren nicht teuer. Mike M. schrieb: > interessanterweise damit > aber auch die Kraft. Wobei mit steigender Geschwindigkeit eigentlich die > Kraft verloren geht. Verstehe ich nicht. Weil der ESC die Akkuspannung via PWM runterstellt. Dadurch reduziert sich Geschwindigkeit und auch Drehmoment. Du denkst an Schaltgetriebe, das ist hier ja fest und wird nicht umgestellt. Mike M. schrieb: > Kann es sein, dass ich für den Servo eventuell einen separaten Treiber > abseits des Microcontrollers brauche? Woher der ESC sein Servosignal bekommt ist ihm egal.
Wie schnell soll der denn überhaupt sein? Du bekommst auch 100 Nm mit entsprechendem Getriebe. Ich weiß nicht wie wichtig das ist, aber z. B. bei einem Schneckengetriebe hättest du den Vorteil der Selbsthämmung. Also wenn der Motor stoppt, heißt das stop, und wenn noch so viel Gewicht dran hängt (ausser natürlich das Getriebe verabschiedet sich).
Mike M. schrieb: > Alternativ noch ein Scheibenwischermotor. Aber ob der mit meinem Setup > kompatibel ist, weiß ich nicht. Scheibenwischermotoren haben in der Regel die komplette Mechanik mit dran, inkl. Endschalter. Dann musst Du noch die ganze Hebelmechanik entfernen und umbauen. Nimm lieber Fensterhebermotoren. Fensterhebermotoren schaffen ca. 8 Nm bei 85 rpm. Brauchst halt noch ne Steuerung in Form einer Vollbrücke für Links/Rechtslauf.
Mike M. schrieb: > Ich wollte die Zeit messen, die er für einen Lauf nach unten und für > einen Lauf nach oben benötigt. Diese Zeiten hätte ich dann > einprogrammiert. Halte ich für fehleranfällig. Die Zeiten sind nicht unbedingt konstant, zum Beispiel, wenn sich die Last und die Bahn aufeinander "einschleifen" und die Reibung weniger wird. Mike M. schrieb: > Das hört sich komplex an. Muss ich mich erstmal einarbeiten. Auf den ersten Blick ja. Auf den zweiten nicht, weil das eine sehr verbreitete Technik ist, die in quasi jedem 3D-Drucker genau so drin ist. Nur ist es bei dir keine Spindel, sondern eben eine Schnur.
Bzgl. Rollladenmotoren: beim Somfy RS100 kann man die Geschwindigkeit und viele andere Sachen einstellen. VG Matthias
Der Somfy ist mir für 200 Euro für dieses Projekt zu teuer;) Habe nun versucht den RC akku mit dem Servo zu verbinden. 7,4V haben die Akkus. 7,2v scheint der Motor noch zu vertragen. 7,9 bis 8,2 kommen bei dem Motor ohne Last tatsächlich an. Last wird allerdings nie erzeugt, da er nicht losfährt. Aufgrund zu hoher Spannung? Die Variante mit Stepper habe ich noch nicht probiert.
:
Bearbeitet durch User
Mike M. schrieb: > Ah Zusatzinfo: Wir sprechen hier über eine Distanz von 40 Metern. Eine > Fahrtrichtung darf dabei gerne 3 Minuten dauern. Mike M. schrieb: > eine Rolle mit 5cm Radius Also hast du gute 30cm pro Umdrehung. Deine Rolle muss bei 40m Distanz also ca. 120-130 Windungen aufnehmen. Welchen Radius hat jetzt die äussere Lage? Wenn das nicht sehr sauber geführt wird werden die Wickel auch unterschiedlich. Eine Zeitmessung zur Positionsbestimmung dürfte aus verschiedenen Gründen ziemlich ungenau sein.
Mike M. schrieb: > Aufgrund zu hoher Spannung? Kann sein. Evtl. sogar dauerhaft. Kann dein Servo 2S Lipo, also 8,4V, vertragen? Dann wäre es eine große Ausnahme, das machen nicht viele mit.
https://emanual.robotis.com/docs/en/dxl/x/xl330-m288/ https://emanual.robotis.com/docs/en/dxl/x/xl320/ https://emanual.robotis.com/docs/en/dxl/ax/ax-12a/ https://www.mybotshop.de/DYNAMIXEL-XL330-M288-T https://www.mybotshop.de/DYNAMIXEL-AX-12A Da kann man viel einstellen... PID gain, Drehmoment, Temperatur usw. Je nach Serie... Ich finde die xl330 sehr interessant und vielseitig und vor allem günstig für die Features...
Ansonsten haben die auch größere Motoren...
Udo S. schrieb: > Also hast du gute 30cm pro Umdrehung. Deine Rolle muss bei 40m Distanz > also ca. 120-130 Windungen aufnehmen. Welchen Radius hat jetzt die > äussere Lage? > > Wenn das nicht sehr sauber geführt wird werden die Wickel auch > unterschiedlich. Eine Zeitmessung zur Positionsbestimmung dürfte aus > verschiedenen Gründen ziemlich ungenau sein. Führung wollte ich mittels Rollenfenster lösen. Die äußere Lage wird ebenfalls bei einem Radius von 5-6cm sein, da zum ziehen ein Angeldraht langt. Ich verstehe nicht wieso ein Steppermotor, dessen Umdrehungen ich zähle mit diesen Unwägbarkeiten genauer sein soll als zeitliche Näherungswerte nach Testfahrten mittels Servo. Jens M. schrieb > Kann sein. Evtl. sogar dauerhaft. > Kann dein Servo 2S Lipo, also 8,4V, vertragen? Dann wäre es eine große > Ausnahme, das machen nicht viele mit. In oben gepostetem Screenshot mit den Werten steht 6V als Range. Wobei bei Stall Torque auch 7,2 V genannt werden. Ich habe nun 4 normale Batterien in Reihe geschaltet und komme damit auf 6V. Die kommen auch am Stecker zum Motor an, aber der Motor springt nicht an. Auch nicht mit 3 Batterien, also 4,5V. Nur über 5V Netzteile. @Uwe Danke für den Tipps zu den anderen Motoren.
:
Bearbeitet durch User
Mike M. schrieb: > Ich habe nun 4 normale Batterien in Reihe geschaltet und komme damit auf > 6V. Die kommen auch am Stecker zum Motor an, aber der Motor springt > nicht an. Auch nicht mit 3 Batterien, also 4,5V. > Nur über 5V Netzteile. Wahrscheinlich weil er sich aufgrund des hohen Innenwiderstands zurücksetzt wenn die Spannung einbricht beim Start.
Mike M. schrieb: > Ich verstehe nicht wieso ein Steppermotor, dessen Umdrehungen ich zähle > mit diesen Unwägbarkeiten genauer sein soll als zeitliche Näherungswerte > nach Testfahrten mittels Servo. Weil du einem Schrittmotor (eventuell mit Getriebe) durch die Schrittanzahl genau vorgibst, wie weit er fahren soll. Wenn er richtig betrieben wird, gibt es keinen Schrittverlust. Beim Servomotor brauchst du einen guten Regler der Drezahl und Umdrehungen zählt und abstellt. Motor + Getriebe vom freundlichen Chinesen 50€ Steuerung aus dem Regenwald 30€ Optional Arduino aus der Ramschkiste Damit bist du jeden Ärger los. Sg
Also ein Nemos 23 anstatt 17 (wie man ihn bei 3d druckern verwendet) mit 2,5Nm. Demnach 10 Mal so stark wie mein Servo und 4 Ampere sollten es machen. Dauerbetrieb wie bei 3d druckern sollten damit ebenfalls drin sein. Wie finde ich ein Getriebe beim China-Mann? Ich finde dort nur Zahnräder aber ohne Halterung. Andererseits kann ich auch den Radius meiner Rolle vergrößern. Sollte dem ganzen gleich kommen. Nutze dazu eine leere Filament Rolle 😅 Bei meiner CNC Fräse steuer ich die Stepper mit einem richtigen Arduino plus Treiber (mini Platinen) an. Die Treiber die in China ist in Kombination mit angeboten werden sind ja riesige Kästen. Kann ich dass auch ohne Treiber alles zusammen in einem lolin d1 mini mit esp home verkleiden, wie bei meinem Servo? Bzw läuft auf dem kleinen Ding zur Ansteuerung des Steppers accelstepper wie oben empfohlen? Wobei ich mir noch nicht sicher bin wie ich das mit meinen Smarthome via iobroker koppel? Kann man accelstepper z.b. mit mqtt ansteuern?
:
Bearbeitet durch User
Mike M. schrieb: > Also ein Nemos 23 anstatt 17 (wie man ihn bei 3d druckern verwendet) mit > 2,5Nm. Demnach 10 Mal so stark wie mein Servo und 4 Ampere sollten es > machen. Dauerbetrieb wie bei 3d druckern sollten damit ebenfalls drin > sein. Wenn der Stepper die benötigten 2,5Nm schon bringt, weshalb brauchst du dann noch ein Getriebe? > Wie finde ich ein Getriebe beim China-Mann? Ich finde dort nur Zahnräder > aber ohne Halterung. Andererseits kann ich auch den Radius meiner Rolle > vergrößern. Sollte dem ganzen gleich kommen. Nutze dazu eine leere > Filament Rolle 😅 Um mehr Zugkraft auf deine Angelschnur zu bekommen musst du den Radius der Rolle verkleinern und nicht vergrößern. Den unten verlinkten Getriebemotor von Pollin habe ich mir vor langer Zeit gekauft, der kann mit der 120mm Rolle bei 12V ca. 1,2kg heben (gerade getestet). Um aber 40m in 3 Minuten zu machen müsste er wohl eher in Richtung 15..24V betrieben werden. Er ist nicht gerade leise, und ob er für Dauerbetrieb gemacht ist, ist dann noch die großer Frage. Der Getriebekasten aus Zinkdruckguss macht von außen einen soliden Eindruck. Da vernietet, kann man leider nicht reinschauen, vom Geräusch her würde ich Zahnräder aus Metall vermuten. https://www.pollin.de/p/gleichstrom-getriebemotor-chm-2435-310422
Beitrag #7210982 wurde von einem Moderator gelöscht.
Ich habe nun einen Steppermotor über Tasmota auf einem D1Mini zum laufen gebracht. Dort kann ich auch exakt die Anzahl der Umdrehungen angeben und die Geschwindigkeit. Der Stepper ist mit 0,6Nm nur wesentlich zu schwach. Mit Puffer schaue ich mal nach 6Nm aufwärts. Parallel versuche ich das ganze über ESP Home zum Laufen zu bringen, da ich dort nur 2 Mal ein Signal über WLAN senden muss, Start und Stop, den Loop macht das Programm auf dem D1 dann selber. Bei Tasmota muss ich jeden Richtungswechsel antriggern.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.