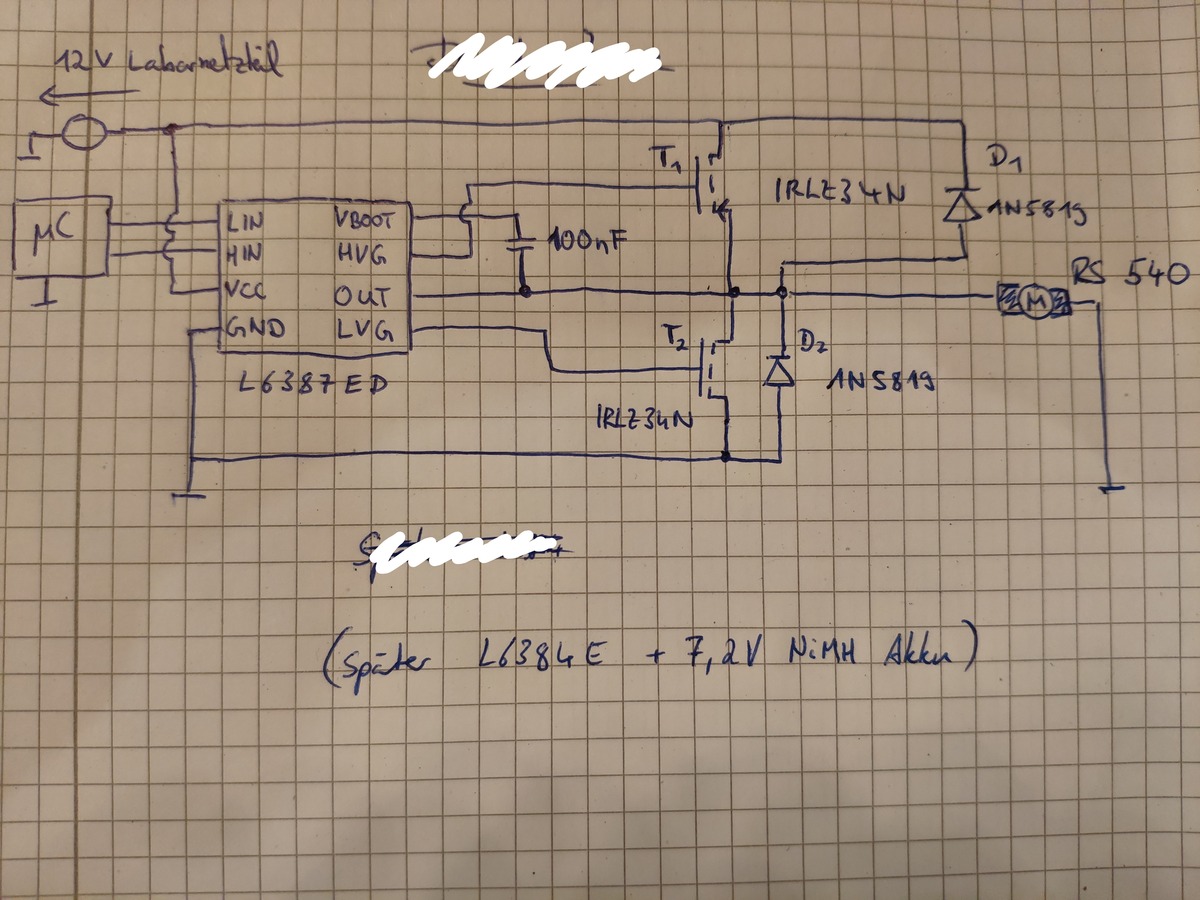
Ich habe die angehängte Halbbrücke aufgebaut und möchte diese weiter zur Vollbrücke ausbauen. Jedoch habe ich ein paar Verständnisprobleme bezüglich der besten Ansteuerung und dem Fluss des Motorstroms. Meine Halbrücke treibt den Motor super bis 65% Tastgrad an (mehr will ich nicht testen, da das die Nennspannung des Motors sonst stark überschreiten würde und er so schon schnell dreht). Dies klappt allerdings nur wenn ich den High Side und Low Side MOSFET invers takte, um die Bootstrap Spannung aufrecht zu erhalten. (Für shoot through protection sorgt der Treiber. Nach meiner Recherche ist dieser Betrieb auch als "aktiver Freilauf" bekannt, macht für mich aber keinen Sinn). Effektiv schließe ich ja beim "aktiven Freilauf" in der off-time den Motor über T2 kurz was eigentlich dem Zustand bremsen entsprechen müsste und dann eher kontraproduktiv wäre. Ich bin mir unsicher wie der Strom in dieser Zeit fließt wenn T1 aus ist. Wenn ich T2 nicht ansteuer arbeitet die Brücke mit der Motorinduktivität ja wie ein Tiefsetzsteller über D2 (allerdings wird da ab 35% Tastgrad der Kondensator nicht mehr ausreichend versorgt). Dagegen kann T2 bei Ansteuerung im aktiven Freilauf ja eigentlich nicht den Strom der Motorinduktivität leiten, da dieser ja weiterhin in Richtung Masse entgegen des Leitenden Kanals des Mosfets fließen müsste oder nicht? Aus diesen Gründen schätze ich den funktionierenden Betrieb als nicht optimal für Bauteile und Motor ein. Oder kann ich ohne Bedenken T1 und T2 invers takten? Grüße Jo
Angehängte Dateien:
-

halbbruecke.jpg
230 KB
:
Verschoben durch Moderator
https://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM Ich habe meinen Denkfehler gefunden unter o.g. link wird der Synchrongleichrichter erläutert welcher das gleiche prinzip nutzt wie der aktive Freilauf. Der Mosfet leitet den Strom eben doch in die andere Richtung ich habe da was mit durcheinander gebracht. Wenn der Motor im statischen Zustand ist wird auch keine Energie im Motor verbraten oder rückgespeist. Man muss nur aufpassen das man nicht zu schnell den Tastgrad ändert, da sich die Schaltung sonst wie ein Hochsetzsteller verhält und es zu Spannungsspitzen am Netzteil kommt, was ich auch beobachtet habe. Ist meine Schaltung also gut wenn ich die Sollgröße des Dutycycles einfach geeignet mit einem Tiefpass filter?
:
Bearbeitet durch User
Jo schrieb: > Ich habe die angehängte Halbbrücke aufgebaut Fehlt da nicht die Bootstrapdiode? Oder ist die im Treiber eingebaut? > Oder kann ich ohne Bedenken T1 und T2 invers takten? Ja. Jo schrieb: > Ist meine Schaltung also gut wenn ich die Sollgröße des > Dutycycles einfach geeignet mit einem Tiefpass filter? Wozu Tiefpass? Du willst doch keine Gleichspannung zur Steuerung der Halbbrücke nutzen, geht mit den ICs gar nicht. Du mußt im Controller dafür sorgen, daß sich das Tastverhältnis nicht zu schnell ändert. Das kann man IM Controller mit einem DIGITALEN Tiefpass machen. Trotzdem kommt am COntroller dann immer eine PWM raus.
Ja ich meinte natürlich einen digitalen Tiefpass der Vorgabe des Duty Cycles im uC. Tut mir leid falls ich das nicht korrekt ausgedrückt habe und danke fürs bestätigen meiner Annahmen. Das es nur Sinn ergibt die FETs mittels PWM anzusteuern war mir bewusst. Edit: In meinem zweiten Beitrag meinte ich auch Stromspitzen und nicht Spannungspitzen Edit 2: Ja ein Ersatz für die Bootstrap Diode ist im Treiber
:
Bearbeitet durch User
Im Schaltplan fehlt der wichtige Kondensator (in den Schaltplänen von deinem Link mit C1 bezeichnet) direkt an der Versorgung der Halbbrücke! (kurze Leitungsänge!) - Beim schnellen Abschalten von T1 wird die Induktivität der (langen) Leitung vom Netzteil bzw. Akku den Strom weiter treiben und die Spannung wird steigen. - Beim schnellen Einschalten von T1 kann die Induktivität der Zuleitung zu Spannungseibrüchen führen. Dagegen hilft der C1. Und auch die Versorgung des Treibers benötigt eine ausreichende Kapazität. (-und eventuell zusätzlich eine Drossel od. Widerstand od. Diode damit der Motorstrom diesen Kondensator nicht schnell leersaugen kann.) Eine rasche Reduktion der PWM, hin zu geringerem duty-cycle führt zur Rückspeisung durch Motorbremsung. Das ist bei Netzteilbetrieb kritisch (Überspannung) - aber weniger beim Akkubetrieb. (Rekuperation) Im Netzteilbetrieb könnten dann Bremswiderstände erforderlich werden.
Als Pufferkondensator habe ich einen 1000uF Elko zwischen 12V und Masse liegen den habe ich aber im Schaltplan unterschlagen merke ich gerade. Ist eine Drossel zwingend notwendig der Strom wird ja auch durch den Ankervorwiderstand begrenzt. Wie würde man die Drossel denn dimensionieren?
Die 1000µF müssen zum (unbekannten) Maximalstrom (Anlaufstrom) des Motors passen -und zur Lieferfähigkeit des Netzteils. Wählt man da einen zu geringen Wert kann der Spannungseinbruch zu Fehlfunktionen des Treibers (od. des µC) führen. Im Zweifelsfall kann man den Treiber über eine Diode und einen Puffer-Elko versorgen. (Wegen der Diode kann der Pufferelko nicht durch den Motor leergesaugt werden. Anstelle der Entkoppelung durch Diode eventuell auch Widerstand oder Drossel möglich.)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.