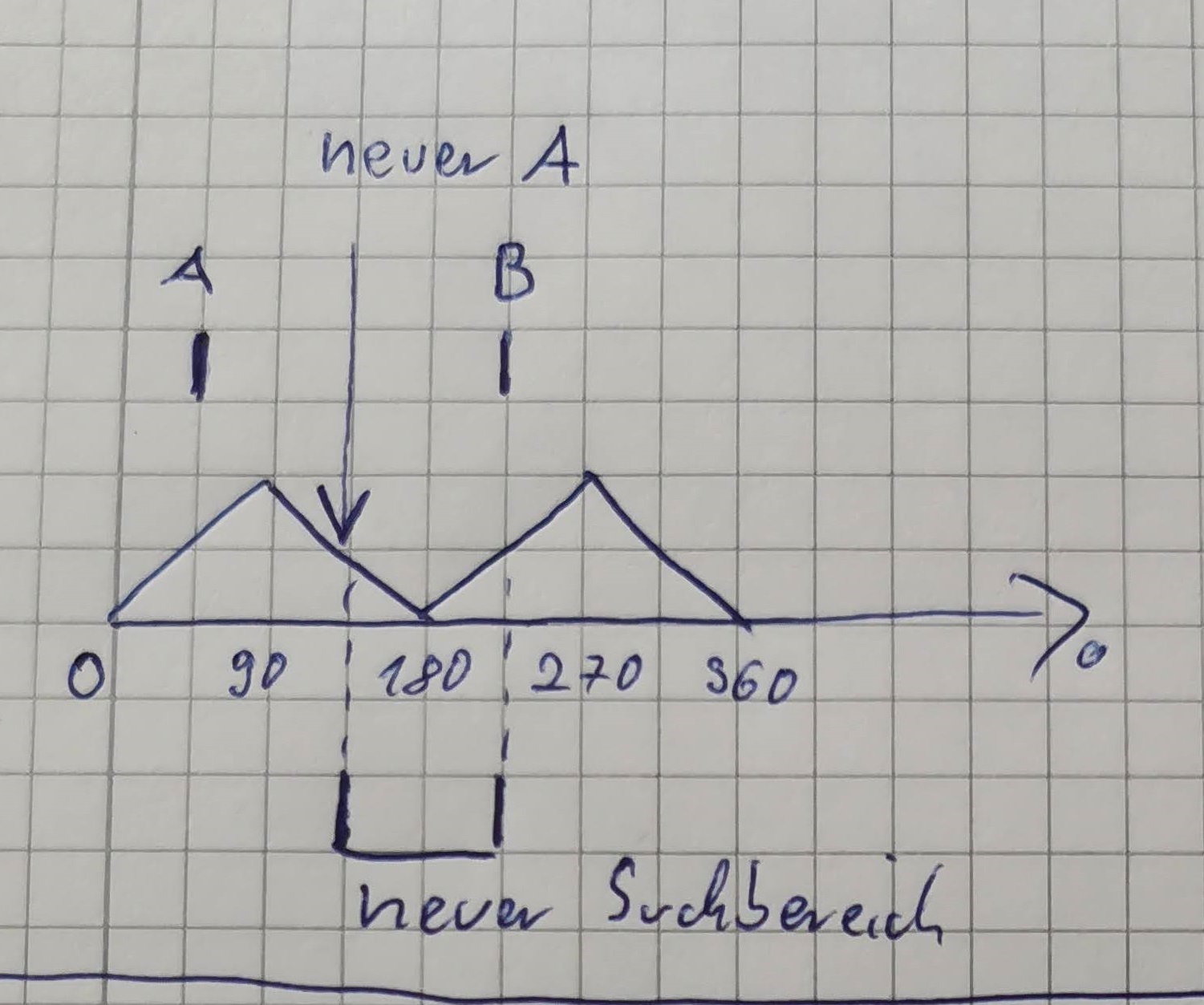
Hi zusammen, ich habe hier eine MagLoop Antenne und habe dafür eine Steuerung gebaut die auch technisch soweit funktioniert (Software entsteht gerade so nach und nach). Ich hänge allerdings an einem Problem, das ich nicht ordentlich lösen kann (Knoten im Hirn oder sowas ;) ). Im Prinzip möchte ich den Punkt finden, an dem mein Schrittmotor den Schmetterlings-Drehkondensator auf die größte Kapazität stellen würde. Einen Endschalter möchte ich nicht verwenden. Da es ein Schmetterlings-Drehkondensator ist, wird bei dem Überstreichen des Maximums der Wert wieder niedriger. Eine "höchste gefundene Kapazität" kann ich indirekt bestimmen, da ich durch VSWR Messung die Resonanzfrequenz bestimmen kann. D.h. je niedriger die Frequenz, desto mehr Kapazität habe ich. Achtung ich spreche jetzt nur noch von Frequenzen, weil das später das einzige ist, was bestimmt werden kann. Der Drehbereich vom Kondensator wirkt sich so aus: 0° - 90° Frequenz steigt 90° - 180° Frequenz sinkt 180° - 270° Frequenz steigt 270° - 360° Frequenz sinkt etc. Was ich nun suche ist 0° (bzw. n*180°), und das möglichst schnell, da der volle Einstellbereich 80.000 Schritte hat. Dazu habe ich mir schon Gedanken Richtung Binärsuche gemacht: 1) Wähle Punkt A wo du gerade bist und bestimme Resonanzfrequenz Af 2) Wähle Punkt B um 180°* weiter und bestimme Resonanzfrequenz Bf 3) Je nach dem welche Resonanzfrequenz Af oder Bf niedriger ist, wird A oder B der Mitte zwischen A und B zugewiesen 4) Gehe zu 1) es sei denn A und B sind weniger als X Schritte auseinander 5) Minimum ausreichend genau gefunden *Ich muss einen Bereich von mindestens 180° überdecken, weil mir sonst ein Minimum entgehen könnte. Das Funktioniert ganz gut, nur gibt es da eine Ausnahme (siehe Anhang): Hinweis: Die Kurve ist als Dreieck gezeichnet, in Wirklichkeit sehen die Geradensegmente aber logaritmisch oder exponentiell aus (welches von gibt mein Hirn aktuell nicht her) Im Bild sieht man, dass A und B natürlich in etwa den gleichen Wert haben, da sie der Kondensator symmetrisch ist. Wenn ich jetzt sage, B wäre kleiner, wird mein neues A auf die Mitte von A und B gesetzt und Minimum liegt weiterhin zwischen A und B Der Schlechtfall ist aber A wäre kleiner, dann wird B auf die Mitte gesetzt und das Minimum liegt nun außerhalb von A und B. Ihr merkt schon, das alleine reicht nicht um das Problem vollständig zu lösen. Hat jemand eine Idee, wie ich dieses Problem beheben kann? Wichtig wäre mir, dass ich so wenig wie möglich Positionen anfahren muss, da die Nullpunktfindung sonst lange dauert. Vorschläge für alternative Algorithmen nehme ich sehr gerne entgegen. Aktuell nehme ich eine Heuristik um den Nullpunkt in etwa zu bestimmen, aber die ist Hartcodiert auf die angeschlossene Antenne. Hier messe ich für eine Frequenz (z.B. 14Mhz) die VSWR und lasse den Motor ein mal 180° drehen und merke mir die Position mit dem minimalen VSWR. Nachteil: Die Antenne oder eine andere könnte auch weniger als 14MHz haben. Das große Ziel am Ende ist automatisch den Nullpunkt finden und von da die Antenne einmal bis obenhin (also +90°) vollautomatisiert durchzumessen. Eine weiter Idee, die ich aber noch nicht ganz durchdacht habe: Messe die aktuelle Resonanzfrequenz und suche dann den nächsten Punkt, wo diese Resonanzfrequenz auch ist. Dann müsste zwischen den Punkten entweder ein Minimum oder ein Maximum liegen. Fände es cool, wenn mir jemand auf die Sprünge helfen könnte. Danke und schöne Grüße Mike P.S.: Sollte hier Quatsch im Text stehen, vergebt mir, bin gerade stark erkältet und kann nicht zu 100% Denken, daher auch die Bitte um Hilfe :)
Angehängte Dateien:
-

IMG_20221016_162706_2.jpg
300 KB
Angehängte Dateien:
-

magloop.png
4,6 KB
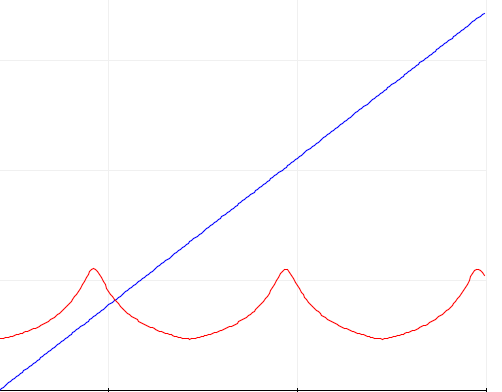
Hier noch ein Plot, wie denn die Frequenz (rot) bezüglich der Position des Schrittmotors (blau) aussieht. Die Achsen hab ich mal weggelassen, da die Werte da keinen Sinn machen. Jedes Minimum der roten Kurve entspricht im Prinzip dem Maximalwert am Kondensator.
Warum so kompliziert, oder sehe ich was falsch? ich würde nen mechanischen Indexpunkt einführen, den der Drehko anfahren kann, etwa durch ne Lichtschranke. Jetzt werden Schritt für Schritt die Kapazitätswerte in der Software eingetragen (Tabelle), die dann später direkt angefahren werden können. Der Drehko wird beim Initialisieren einmal auf den Indexpunkt gefahren, danach weiß die Soft, in welcher Stellung er ist, da diese in der Soft in ner Variable mitgeführt wird. Wenn der Controller immer unter Saft bleibt, ist die Initialisierung nur selten nötig. mfg
Du hast damit vollkommen recht! Allerdings müsste ich dann ein weiteres Kabel dafür legen. Antenne und Controller stehen halt weit auseinander. Daher die Idee, den Nullpunkt indirekt zu bestimmen.
Mike M. schrieb: > Du hast damit vollkommen recht! Allerdings müsste ich dann ein weiteres > Kabel dafür legen. Antenne und Controller stehen halt weit auseinander. > Daher die Idee, den Nullpunkt indirekt zu bestimmen. Dann würde ich mich um ne Mehrfachausnutzung des Kabels bemühen. Du hast doch bestimmt mehere Adern zur Verfügung? mfg
Naja Kabel vom Schrittmotor und Stecker hat 4 Pins dann noch das Antennenkabel und das wars. Muss dann halt an den Controller eine weitere Buchse dran machen und ein weiters eigenes Kabel hinlegen. Und das würde ich gerne vermeiden.
Mike M. schrieb: > Naja Kabel vom Schrittmotor und Stecker hat 4 Pins dann noch das > Antennenkabel und das wars. > Muss dann halt an den Controller eine weitere Buchse dran machen und ein > weiters eigenes Kabel hinlegen. > Und das würde ich gerne vermeiden. Ist klar. Sendest Du mit der Antenne? Ist die Schleife galvanisch mit dem Controller verbunden? Hast Du ne Erde am Antennen und Controllerstandort? Ich denk dabei an den Innenleiter des Coaxkabels... ;-P mfg
Sendest Du mit der Antenne? -> Ja Daher würde ich den Innenleiter eher nicht zweckentfremden wollen.
Mike M. schrieb: > Naja Kabel vom Schrittmotor und Stecker hat 4 Pins dann noch das > Antennenkabel und das wars. Wenn du ein wenig Hardware mit an die Antenne bringst, reichen 4 Adern bequem für Speisespannung sowie TXD und RXD. Dazu muss die Steppersteuerung nur an die Antenne. Die kann lokal dann auch Indexlöcher oder so verarbeiten.
Matthias S. schrieb: > Wenn du ein wenig Hardware mit an die Antenne bringst, reichen 4 Adern > bequem für Speisespannung sowie TXD und RXD. Mit sowas wie einem LIN-Bus würden sogar zwei genügen. ;-) Aber ja, man muss dann etwas Intelligenz dahin packen. Mike, dein Problem ist einfach, dass du nur aus dem SWR nicht ohne weiteres auf die Lage der Resonanzfrequenz schließen kannst. Du müsstest mindestens wechselseitig auf zwei verschiedenen Frequenzen messen.
ps: Ich halte das, zumindest in der Form, wie du es gern lösen möchtest, für ein HF-Problem und habe es mal dahin geschoben.
Wäre eine Möglichkeit, nur wäre dann der Stepper im Controller wieder obsolet. Ich nehme das mal als Notfallplan, die 4Pin Buchse gegen eine 6Pin Buchse zu tauschen und dann ein 6 adriges Kabel für den Stepper und Endschalter zu benutzen. Aber ich mache mir dennoch demnächst weiter Gedanken dazu, wie das trotzdem schnell und effizient ohne Endschalter klappen könnte.
Hallo Mike, Du sendest z.B. ein 10kHz Ton auf dem Innenleiter während des Sendens mit kleiner Leistung (<10W) um der Loop mitzuteilen, dass sie sich gerade im Tuning Betrieb befindet. Der Controller muss nun den C so verstellen, dass Du ein minimales SWR am Antennen-Fusspunkt misst. Wenn der Abstimmvorgang abgeschlossen ist, sendest Du mit deiner Arbeits-Leistung. Problem bei der Umsetzung: 1) Steuersignal 10kHz richtig am TRX einkoppeln und an der Antenne auskoppeln und dem Controller zuführen. 2) SWR an der Antenne Messen und dem Controller übergeben. 3) Eventuelle Rückmeldung, vom Controller, wenn der Abstimmvorgang bei der Arbeitsfrequenz erfolgreich war (z.B. SWR < 2). Z.B. Mittels eines Rückkanals, wieder auf dem Innenleiter z.B. mit 4kHz. Viel Erfolg und gute Umsetzung. vy73 Markus Ergänzung: Ich bin mir noch nicht im Klaren, ob Du die Antenne portabel oder stationäre aufbauen möchtest und ob Du an der Antenne einen Akku zur Stromversorgung hast oder die Energie auch über das Steuerkabel zuführen wolltest. Ich bin davon ausgegangen, dass Du an der Antenne einen Akku einsetzt.
Angehängte Dateien:
-

zero.gif
9,8 MB -

controller.jpg
340 KB

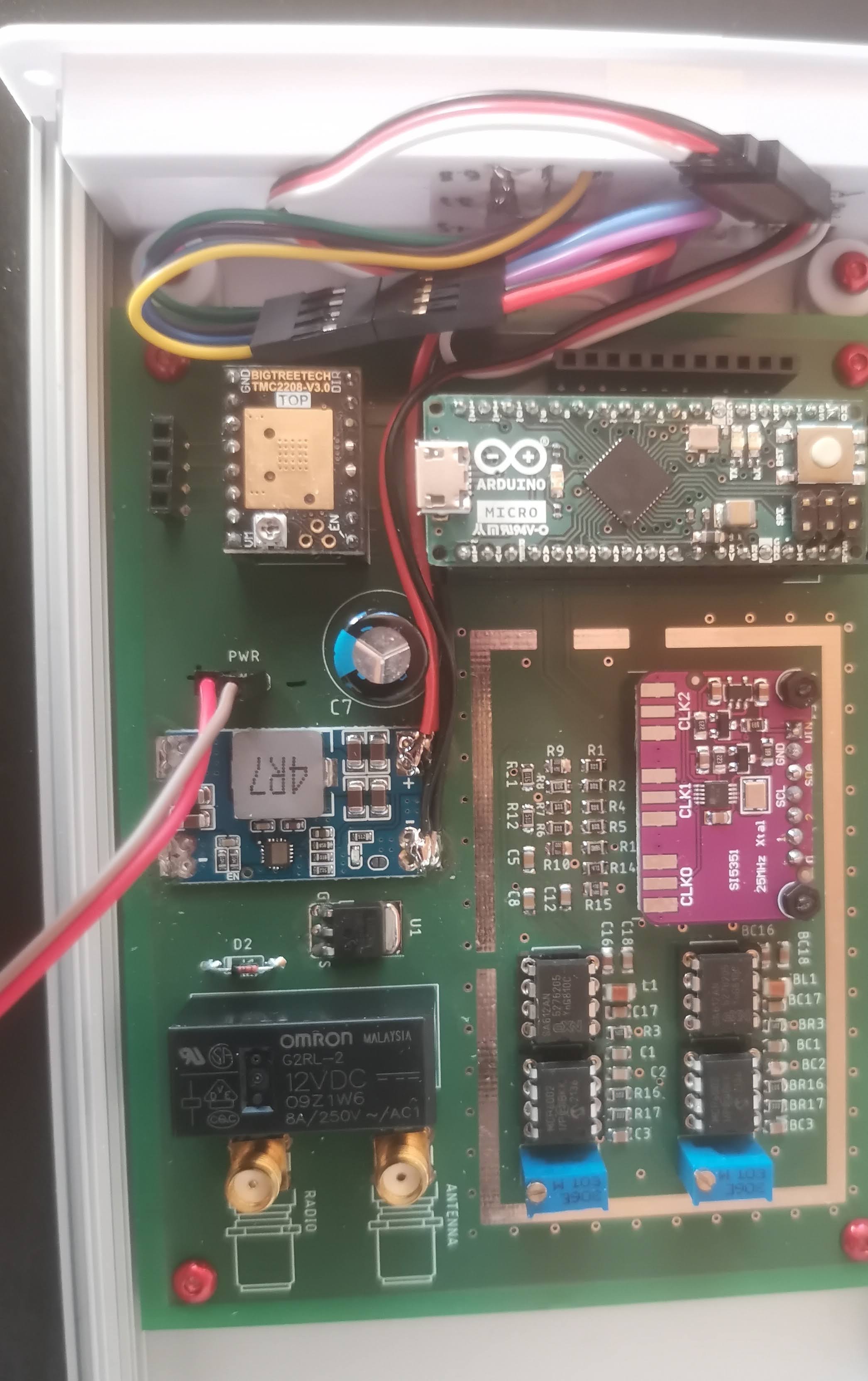
Jörg W. schrieb: > Mike, dein Problem ist einfach, dass du nur aus dem SWR nicht ohne > weiteres auf die Lage der Resonanzfrequenz schließen kannst. Du müsstest > mindestens wechselseitig auf zwei verschiedenen Frequenzen messen. Das geht aber schon ;) Ich glaube ich muss noch mal ausholen, was ich schon hier habe, und was schon funktioniert. Die Hardware hat einen RF In und RF Out. Im Normalbetrieb sind Rf In und Rf Out verbunden. Zur Bestimmung der aktuellen Resonanzfrequenz wird RF Out (also wo die Antenne dran hängt) auf die interne SWR Messschaltung umgestellt. Die kommt komplett ohne Funkgerät aus, da sie ihren eigenen Oszillator hat. Hier kann ich über das gewünschte Frequenzband sweepen und mir das Minimum ausgeben lassen. Damit habe ich die Resonanzfrequenz gefunden. Die Schaltung funktioniert sehr gut, denn verglichen mit meinem RigExpert AA-55 liege ich, ohne Kalibrierwerte benutzt zu haben, maximal 100 KHz daneben. Weiterhin gibt es einen Anschluss für einen Schrittmotor, der über einen TMC2209 Schrittmototreiber angesteuert wird. Ein CAT Anschluss ist auch vorhanden, um später direkt vom Funkgerät die Frequenz auszulesen. Mein Ziel ist später, dass die Antenne immer mit dem Funkgerät mitläuft. Nur kurz vor dem Senden drückt man noch mal kurz auf "FineTune", dann wird die Antenne noch mal fein eingestellt, damit man ein möglichst niedriges SWR hat. Ich kann derzeit also 1) die aktuelle Resonanzfrequenz der Antenne bestimmen 2) den Motor so weit drehen, bis ich bei einer Wunschfrequenz angekommen bin (also Oszillator auf Wunschfrequenz stellen und bis Minimum fahren) 3) Mit gewissem Zeitaufwand Position des Motors zu Resonanzfrequenz (mit 1)) mappen Ich versuche mal im Anhang ein gif anzuhängen, dass den Gutfall für die Binäre suche zeigt (also wo das Minimum nicht heimlich übersprungen wird). GIF muss man in einem neuen Tab aufmachen, damit es abspielt. Im Angang hab ich auch noch ein Bild vom offenen Controller (hälfte nicht angeschlossen). Besteht im Prinzip bis auf die SWR Messschaltung nur aus fertigen Modulen und anderen Teilen die ich da hatte.
Mike M. schrieb: > Ich glaube ich muss noch mal ausholen, was ich schon hier habe, und was > schon funktioniert. Ja, danke, das erklärt es natürlich.
Hallo Mike, >Die Schaltung funktioniert sehr gut, denn verglichen mit meinem >RigExpert AA-55 liege ich, ohne Kalibrierwerte benutzt zu haben, maximal >100 KHz daneben. Für eine Mag-Loop kann das aber schon zu viel sein, weil dann die Steuerung dauernd um die "Anpassungs-Kerbe alias SWR-Minimum" hin und her pendelt. Du solltest schon auf ein KHz genau das Minimum treffen, zumindest im Frequenzbereich des 80m bis 15m Bandes, sofern Du soviel anpassungsmäßig überstreichen kannst. Bei höheren Frequenzen führt die relative Bandbreite einer Mag-Loop zu größeren absoluten Frequenzabständen zwischen der linken und rechten Seite um das SWR-Minimum. In diesem Fall könnten gröbere Abstimmschritte ausreichen. Ich habe aber angenommen, dass Du die Loop für Kurzwelle einsetzen willst. LG Markus
Bitte noch mal ganz lesen, das wird noch genauer, da aktuell die Kalibrierung noch nicht implementiert ist ;) Mike M. schrieb: > ohne Kalibrierwerte benutzt zu haben Mike M. schrieb: > Mein Ziel ist später, dass die Antenne immer mit dem Funkgerät mitläuft. > Nur kurz vor dem Senden drückt man noch mal kurz auf "FineTune", dann > wird die Antenne noch mal fein eingestellt, damit man ein möglichst > niedriges SWR hat. Zudem wird zwischen den einzelnen Kalibrierpunkten interpoliert, wenn die Frequenz dazwischen liegen sollte. Das ist ausreichend genau für das reine Empfangen. Markus W. schrieb: > Ich habe aber angenommen, dass Du die Loop für Kurzwelle einsetzen > willst. Genau, das stimmt auch: 10m bis 20m Band soll am Ende abgedeckt werden.
Dann hast Du je nach Güte Deiner Loop so 5kHz bis 100KHz breite Anpassungs- kerben. Das sollte reichen das Minimum zu finden. Was musst Du den kalibrieren, wenn Du eine Signalquelle für die Messung hast? Deinen MC-Frequenzcounter oder Deine SWR- Brücke? Du hast ja wohl keinen VNA in den Controller eingebaut, der vektoriell messen tut ;-) Noch eine kleine Anekdote aus meinem AFU Repertoire. Ich hatte mal einen olivgrünen TRX als Tornister-Gerät von R&S (Neuauflage) übers Wochenende daheim und habe dieses 30kE teure Gerät an meine Mag-Loop im 20m Band angeschlossen (14.100kHz) um die NCDXF Baken anzuhören. Als ich dann auf tune gedrückt habe, hat es wild geklappert und nach einer Minute habe ich den Tunevorgang abgebrochen, weil ich befürchtet habe, dass das Gerät eventuell Schaden nehmen könnte - so war zumindest mein Eindruck. Könnte aber auch daran gelegen haben, dass der TRX auch auf breitere Kanäle optimiert war, den neben Fonie und CW konnte er auch ganze IP-Ranges und Telefonverbindungen wie eine Vermittlungsstation übertragen. Trotzdem war ich erstaunt, das die Mag-Loop ihm nicht so zugesagt hat. vy73 Markus
Du kannst auch einen (oder zwei) mechanischen Endanschlag an Deinen Schmetterlinkskondensator machen. Ich wüßte nicht, wozu man die 360° nutzen wollte. 180° reichen.
wie von Walter T. vorgeschlagen und dann den Motorstrom messen. Manche Treiber haben direkt einen Ausgangspin dafür, und geben einen High- oder Low-Pegel raus, wenn der Strom über einen bestimmten Wert steigt. Das könntest Du dann auswerten. Markus
Ein moderner Treiber mit Stall-Detection wäre natürlich nett. Ansonsten hält es jeder mir bekannte Schrittmotor und -Treiber aus, mal für ein paar zig Sekunden erfolglos gegen eine festsitzende Welle zu kämpfen, ohne kaputtzugehen.
Offensichtlich ist der Controller der Schrittmotore bei der Antenne. Übrigens, sehr schön aufgebaut! Da Du im "DC" Bereich sendest, sollte es möglich sein, mit dem Arduino die Frequenz zu messen. Wenn Dein Stepper einen Endschalter hat, kann der Arduino über eine hinterlegte Tabelle den Stepper auf die gemessene Frequenz auf den in einer Tabelle hinterlegten Punkt fahren. Ist halt ein grobes Konzept. Die Details, z.b.: wie eine Frequenzwechsel aussieht müssen noch geklärt werden.
Hallo Mike, mit welcher Leistung hast Du vor zu arbeiten. Bei 100Watt könntest Du schon mit erheblicher Einstrahlung in Deinen Controller rechnen, da musst Du Deine Kabel-Zuführungen und die interne Verkabelung gut abblocken, sonst könnten sich Deine Module unkontrolliert verhalten oder gar gehimmelt werden. Bring mal einen Ferritkern (ohne Spalt, also kein Klappferrit) auf Dein Antennenkabel direkt an der Antenne an und messe mal nach einem Sendevorgang die Temperatur vom Kern. Wenn Du Dir die Finger verbrennst oder zumindest eine erhebliche Erwärmung bemerkst, dann musst Du noch was machen, denn in diesem Fall hast Du Mantelströme auf deinem Koaxkabel und Deine Loop als magnetischer-Dipol strahlt nicht symmetrisch und erzeugt wohl möglich noch Störungen, die Dir dein Nachbar übel nehmen könnte. Vorsicht auch bei Fensterrahmen, nicht, dass sich Deine Scheiben trüben, weil Du den Rahmen in Resonanz gebracht hast und über die Scheibenmetallisierung Ströme fließen ;-) vy73 Markus
Bei meiner Loop ist das so geregelt: In meinem Steuergerät befindet sich ein up/down Zählermodul. Gezählt werden damit die Takte mit der der Schrittmotor gefüttert wird. Der Anfang des 20m Bandes ist bei mir 000000 und wurde per SWR ermittelt. 17 ,18,12 und 10 Meter sind nach diesem Schema festgelegt inklusiv ihre qrp Frequenzen. der Motor hat einen Schrittwinkel von 1,8 Grad ,ist also viel zu grob für eine Abstimmung. Ein Schneckengetriebe reduziert den Schrittwinkel so weit,so dass sich im Resonanzbereich jeder einzelne Schritt auf dem Stehwellenmessgerät optisch nachvollziehen lässt. Soweit bin ich mit dieser Lösung zufrieden.
Markus W. schrieb: > Was musst Du den kalibrieren, wenn Du > eine Signalquelle für die Messung hast? Einmal den Oszillator Si5351 und dann werden zur Messung zwei Frequenzen benutzt, die 10KHz auseinander liegen (als ich die Vergleichsmessung gemacht habe, waren es noch 100KHz) und ein Mischer. Da habe ich noch einen Wurm drin, damit das Ergebnis auch auf die richtige Frequenz bezogen ist. Wer genaueres über die Messschaltung lesen will, kann hier mal schauen: https://www.instructables.com/Magnetic-Loop-Antenna-Automated-Tuner/ Dave (G7IYK) hat sich mit der Schaltung an dem Paper "A Low Budget Vector Network Analyzer for AF to UHF" von Professor Dr Thomas Baier (DG8SAQ) orientiert und ich habe die fast 1 zu 1 übernommen. Markus W. schrieb: > wie von Walter T. vorgeschlagen und dann den Motorstrom messen. Das wäre noch eine schöne Idee, muss ich mal testen. Habe jedoch ein Getriebe mit 51 : 1 dazwischen. Mal sehen ob sich das "spüren" lässt, bevor sich etwas anfängt zu verbiegen, da die Konstruktion aus viel 3D Druck besteht. Muss noch dazu sagen, dass mir eine gewisse Widerholungsgenauigkeit wichtig ist, dass ich beim Aus- und wieder Anschalten die Daten aus dem EEPROM wieder verwenden kann. Markus W. schrieb: > mit welcher Leistung hast Du vor zu arbeiten. Mit maximal 100W. An das Problem hab ich schon ein Stück weit gedacht, aber noch nicht ganz fertig gedacht. Zwischen Gehäuse und Platine habe ich etwas Platz gelassen, sodass ich Weißblech dazwischen, darunter und darüber bekomme. Das heißt den Schalterbereich kann ich fast abschotten, jedoch würde aktuell die Platine selbst einen kleinen Spalt übrig lassen. Da hatte ich leider nicht (so wie an der Messschaltung) Durchkontaktierungen angebracht. Aktuell ist die Platine die erste Version und da muss noch viel gemacht werden. Hatte schon überlegt den Umschalter auf eine eigene Platine zu verfrachten. Ich sehe mir die Situation mithilfe von deinem Tipp mal an, und schaue was tatsächlich zu tun ist. Markus W. schrieb: > Vorsicht auch bei Fensterrahmen, nicht, dass sich Deine Scheiben > trüben, weil Du den Rahmen in Resonanz gebracht hast und über > die Scheibenmetallisierung Ströme fließen ;-) Die steht dann später zum Glück sehr weit entfernt von allem mitten im Dach.
herbert schrieb: > Bei meiner Loop ist das so geregelt: > In meinem Steuergerät befindet sich ein up/down Zählermodul. Gezählt > werden damit die Takte mit der der Schrittmotor gefüttert wird. Der > Anfang des 20m Bandes ist bei mir 000000 und wurde per SWR ermittelt. 17 > ,18,12 und 10 Meter sind nach diesem Schema festgelegt inklusiv ihre qrp > Frequenzen. > der Motor hat einen Schrittwinkel von 1,8 Grad ,ist also viel zu grob > für eine Abstimmung. Ein Schneckengetriebe reduziert den Schrittwinkel > so weit,so dass sich im Resonanzbereich jeder einzelne Schritt auf dem > Stehwellenmessgerät optisch nachvollziehen lässt. Soweit bin ich mit > dieser Lösung zufrieden. Aber wenn du bei "000000" Anfängst, wie bekommst du dann deinen Nullpunkt?
Mike M. schrieb: > Aber wenn du bei "000000" Anfängst, wie bekommst du dann deinen > Nullpunkt? Mein Nullpunkt ist exakt die Stellung des Drehkos die auf 20 Meter bei 14,000MHz ein gutes VSWR ergibt. 14,060Mhz ist dann bei mir "23".
Ah, verstehe, im Prinzip genau das, was ich gerade auch schon mache ;)
Angehängte Dateien:
-

suboptimal.jpg
47 KB

Hallo Mike, pfiffige Idee mit den zwei gleichzeitigen Frequenzen. Hoffe das richtig verstanden zu haben. Da habe ich doch fast ins Schwarze getroffen, als ich meinte, dass Du wohl keinen VNA dran baust, nur invertiert ;-) Für diesen Fall brauchst Du doch keinen Nullpunkt. Dein C hat ja nur 180 Grad Variation. Mit Deiner Untersetzung von 51:1 muss der Stepper nur 200x51x0.5 also 5100 Schritte durchlaufen. Du musst nur den Gradienten der beiden Frequenzen, die Deine Signalquelle auf die Antenne bringt betrachten um zu entscheiden ob Du den Motor links oder rechts herum laufen lassen musst. Die Position merkst Du Dir im EEPROM doch. Und wenn Du am TRX ein anderes Band wählst, dann musst Du halt neu suchen, das wird auch nicht so lange dauern. Und wenn Du später noch die CAT Auswertung machst und damit die TRX Frequenz vorab hast, kannst Du ja noch schneller die Stelle der besten Anpassung anfahren. Bin schon gespannt auf Deine weiteren Fortschritte. Habe mir auch die Seite von Dave (G7IYK) angesehen. Ein schönes Projekt aber leider wird nur der Fokus auf die Steuerung und die Programmierung gelegt nicht aber auf die Anbindung der HF an die Loop in Punkto Ströme. Ich hoffe Du hast da eine bessere (d.h. massivere) Anbindung. vy73 Markus
Walter T. schrieb: > Ansonsten hält es jeder mir bekannte Schrittmotor und -Treiber aus, mal > für ein paar zig Sekunden erfolglos gegen eine festsitzende Welle zu > kämpfen, ohne kaputtzugehen. Wurde früher bei Diskettenlaufwerken gemacht, um Spur 0 zu finden: Den Schreib-Lesekopf mehr als maximale Spuranzahl zurückfahren. Der Kopf ratterte gegen den Anschlag und stand dann auf Spur 0 (man erinnere sich an die C= 1541).
Angehängte Dateien:
-

suboptimal2.jpg
140 KB
{kind=link}
Da war Peter schneller und ich zu langsam. Wollte noch das Bild anhängen. Auch suboptimal! Markus
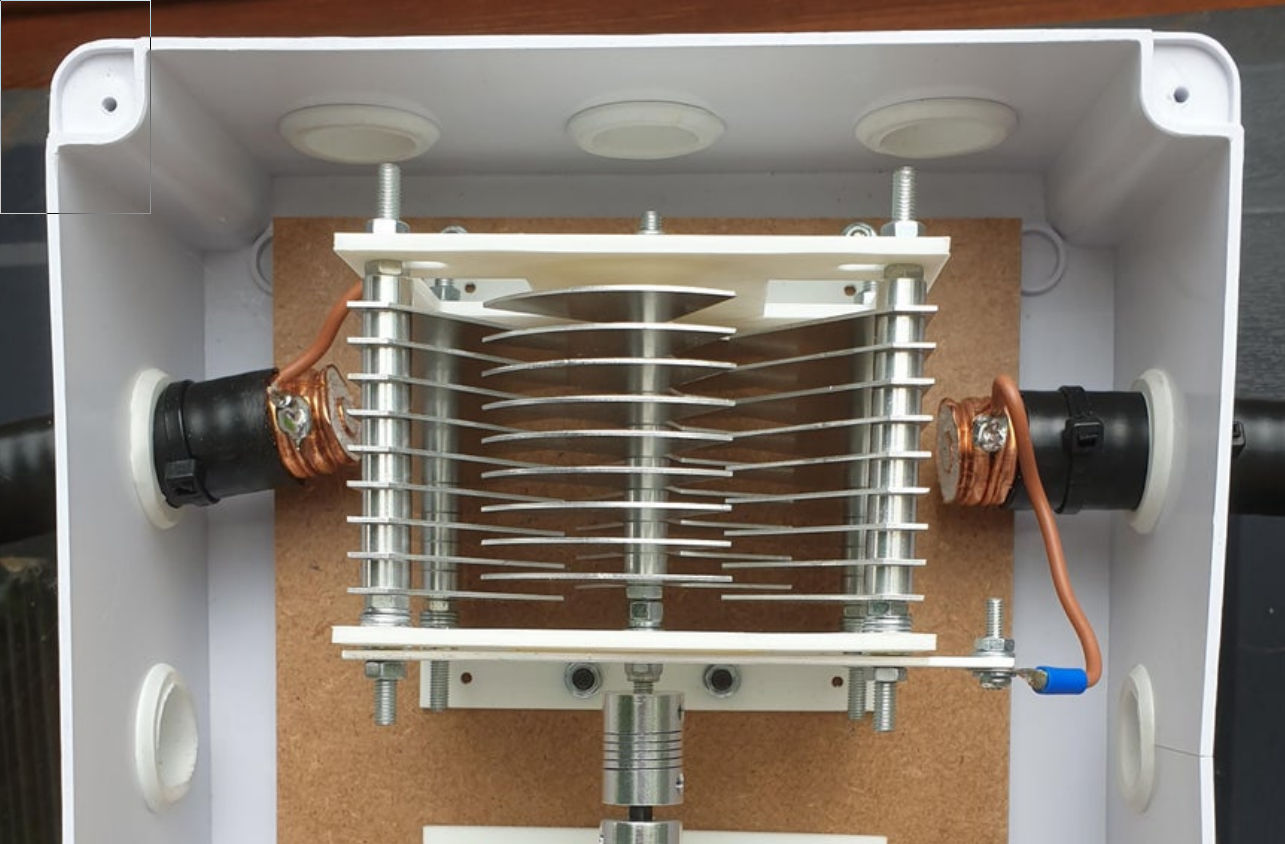
Markus W. schrieb: > Du musst nur den Gradienten der beiden Frequenzen, > die Deine Signalquelle auf die Antenne bringt betrachten um zu > entscheiden ob Du den Motor links oder rechts herum laufen lassen > musst. Die Position merkst Du Dir im EEPROM doch. Stimmt, nach dem Einschalten, kann ich zumindest dann sofort sehen, wo ich mit dem Dreko stehe. Dann muss ich nur einmal den Nullpunkt finden für die initiale Kalibrierung, da wäre etwas mehr Zeit vernachlässigbar. Markus W. schrieb: > Anbindung der HF an die Loop in Punkto Ströme. > Ich hoffe Du hast da eine bessere (d.h. massivere) Anbindung. Ja, die Loop ist aus Alu, der Kondensator ebenfalls. Die Platten vom Dreko sind verschweißt und da gehen so Laschen weg, die auch angeschweißt sind. Aktuell sind die großflächig mit der Loop verschraubt, damit ich das nochmal zerlegen kann, wenn was mechanisch nicht passt. Wenn ich fertig bin, werden die Laschen an der Loop einfach festgeschweißt.
Hallo Mike, meine ersten Loops waren auch aus Alu-Bändern, 10cm breit 1,5mm dick gefertigt. Ich habe mich dann für Kupfer entschieden, da Alu schnell eine Oxidschicht bildet, die auch bei massiver Verschraubung allmählich den Übergangswiderstand anwachsen lässt. Da die Mag-Loop für das Senden schon von Haus aus benachteiligt ist, weil ihr Wirkungsgrad aufgrund von Länge-Umfang zu Lambda ungünstig ist, zumindest bei 80m und 40m ( bei Dir mit 20m bis 10m sieht es etwas günstiger aus) ist es wichtig die Übergangswiderstände so weit zu minimieren wie nur irgendwie machbar. Meine größte Loop hatte eine Druchmesser von 1,8m, so daß man sie noch in einer Wohnung grad so aufbauen konnte. Du hättest unter dem Dach wahrscheinlich mehr Platz, brauchst aber für das 20m und 10m Band und alle dazwischen liegenden Bänder, keine so große Loop. 25% vom 10m sind 2,5m Umfang, also sollte Deine Loop nicht mehr wie 80cm Durchmesser haben. Es gibt unter den Fachleuten unterschiedliche Ansichten, ob eine Mag- Loop mehr wie 0.25*Lambda Umfang haben sollte. Auf jeden Fall ändert sich ihre charakteristische Strahlungsart von rein magnetisch auf immer mehr elektrisch und damit ihr Strahlungsverhalten. Wie sich das auf die Preselektor-Wirkung beim Empfang auswirkt ist auch noch zu diskutieren. Da fällt mir gerade noch ein, dass Du den MC während seiner Untätigkeit beim Empfang schlafen legen solltest, sonst hast Du wohl möglich keine Freude beim Empfang, trotz der selektiven Wirkung der Antenne. Soweit von meiner Seite für heute - bin jetzt unterwegs. vy73 Markus
Mike M. schrieb: > Habe jedoch ein > Getriebe mit 51 : 1 dazwischen. Das klingt nach Schneckengetriebe. Ein präziser mechanischer Anschlag würde da mechanisch recht aufwendig. Mein erster Gedanke, wenn ich von der Kombination "Schrittmotor" und "Schneckengetriebe" lese, ist übrigens "Schnapsidee - sowas passiert gerne dann, wenn man ein Design von kleinem Bürstenmotor auf Schrittmotor ändert, ohne dessen Vorteile mitzunehmen." (Schnapsidee deshalb, weil man sich ohne besondere Maßnahmen wie vorgespanntes Getriebe den Auflösungsgewinn durch Genauigkeitsverluste erkauft.) Aber vielleicht gibt es ja gute Gründe. Geht es darum, eine elektrisch heiße Welle zu isolieren?
Walter T. schrieb: > Das klingt nach Schneckengetriebe. Ein präziser mechanischer Anschlag > würde da mechanisch recht aufwendig. Nein, Planetengetriebe, aber Spiel ist da. Das Umkehrspiel wird durch die Firmware kompensiert. ______________________________ Das Endanschlag Problem habe ich jetzt doch vor anders zu lösen. Ich verzichte einfach auf den "echten" Nullpunkt und lasse alles so wie es ist, mit einer kleinen Änderung. Ich beschreibe am Besten, wie ich es jetzt umsetze, nicht dass es noch verwirrend wird: Es gibt eine Einstellung von Start- und Endfrequenz, was die Antenne definitiv abdeckt (z.B. 14.000MHz bis 30.000MHz) *Für die Kalibrierung:*
1 | 1) Suche rückwärts, wo das niedrigste SWR für 14.000MHz ist |
2 | 2) Stepperposition in Liste* an Position für diese Frequenz abspeichern |
3 | 3) Erhöhe Frequenz um x kHz und suche SWR Dip |
4 | 4) Gehe zu 3), es sei denn wir sind über 30.000MHz |
*Liste wird so ausgelegt, dass ich in konstanter Zeit die nebenliegenden Frequenzen für eine angefragte Frequenz finden kann *Nach dem Einschalten:* Ich treffe jetzt mal die Annahme, dass ich mich Normalbetrieb nicht außerhalb der normal genutzten 90° bewege.
1 | 1) Prüfe ob Daten im EEPROM vorhanden (wenn nicht, muss die Kalibrierung vom Benutzer gestartet werden) |
2 | 2) Messe die aktuelle Resonanzfrequenz |
3 | 3) Suche passende Schrittmotorposition aus dem EEPROM raus (muss in den meisten Fällen zwischen zwei Frequenzen interpoliert werden |
4 | 4) Setze Schrittmotorpositionsoffset auf diesen Wert |
Damit sollte ich nun wieder an die Daten im EEPROM ausgerichtet sein. Zum Testen könnte ich noch ein paar Punkte aus dem Speicher anfahren und überprüfen, wie weit sie abweichen. Eine entsprechende Meldung, wenn ein gewisses SWR überschritten wird, wäre dann denkbar. Der Nachteil für diese Methode ist natürlich, dass man nicht das komplette Spektrum der Antenne abdeckt, aber solange die benötigten Bänder enthalten sind, ist das für mich vollkommen okay.
Mike M. schrieb: > Ah, verstehe, im Prinzip genau das, was ich gerade auch schon mache ;) Ja, nur geht das bei mir ohne externen Mikrocontroller. Bei mir reicht ein Aufkleber auf der Steuereinheit mit den Eckfrequenzen pro Band und deren Qrp Frequenzen. Für das beste VSWR... wertest du einen Richtkoppler aus ? Ich meine via Controller?
herbert schrieb: > Für das beste VSWR... wertest du einen Richtkoppler aus ? Ich meine via > Controller Meine Steuerung hat einen eigenen Oszillator und eine Messbrücke, also im Prinzip ein kleines Antennenmessgerät eingebaut. Mit einem Umschalter kann ich die Antenne digital zwischen Funkgerät und dem Antennenmessgerät umschalten lassen. Eine SWR Messung zwischen Funkgerät und Antenne kann mein Gerät (noch) nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.