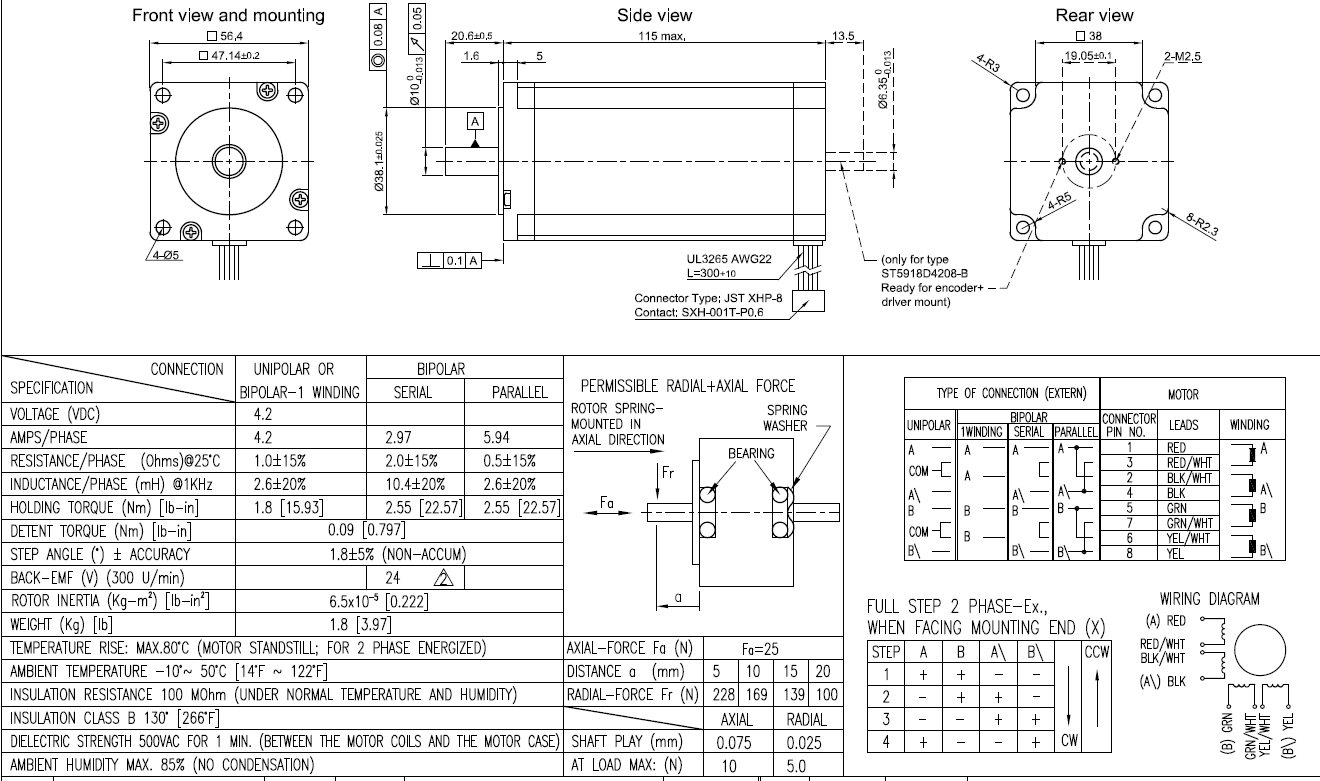
Guten Morgen, hätte an Hand des Nanotec ST5918D4208 Schrittmotors einige Frage bzgl. der Ansteuerung (Datenblatt-Auszug anbei): * Warum hat unipolar und Bipolar eine Spannungsangabe die restlichen Ansteuerungen nicht? * An sich soll die Ansteuerung serial-bipolar erfolgen. Wie wäre hier die Herangehensweise für den Treiber-Chip? Mein Weg wäre über die Leistung von 2.97A²*2 Ohm wären rund 18 Watt. Wenn ich die Endstufe nun mit 24V betreiben wären es eigentlich nur mehr 0.75A. Dafür gibt es ja integrierte Endstufen wie den DRV8425 von TI?! Danke
Angehängte Dateien:
-

Nanotec_ST5918D4208.PNG
89 KB
:
Verschoben durch Moderator
Mike schrieb: > * Warum hat unipolar und Bipolar eine Spannungsangabe die restlichen > Ansteuerungen nicht Sollte man aus AMPS x RESISTANCE berechnen können, also 5.94V serial und 2.97V parallel, wobei es hier noch die Unterscheidung RMS oder PEAK = 1.41 x RMS gibt, dein Treiber muss PEAK schalten können, also 2.97 x 1.414 = 4.2A, also irgendwie so was https://www.amazon.de/Diyeeni-Zweiphasen-Schrittmotor-Controller-Rauscharm-default/dp/B07WYJW9XR Mike schrieb: > Wie wäre hier > die Herangehensweise für den Treiber-Chip? Mein Weg wäre über die > Leistung von 2.97A²*2 Ohm wären rund 18 Watt. Das sind bloss die Verluste des Motors, die Antriebsleistung kommt hinzu. Mike schrieb: > Wenn ich die Endstufe nun > mit 24V betreiben wären es eigentlich nur mehr 0.75A. Leistung des Netzteils: https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10 (Nanotec scheint nicht mehr mitteilen zu wollen, welches Netzteil ihre Treiber brauchen).
:
Bearbeitet durch User
Angehängte Dateien:
-

TMC.png
110 KB
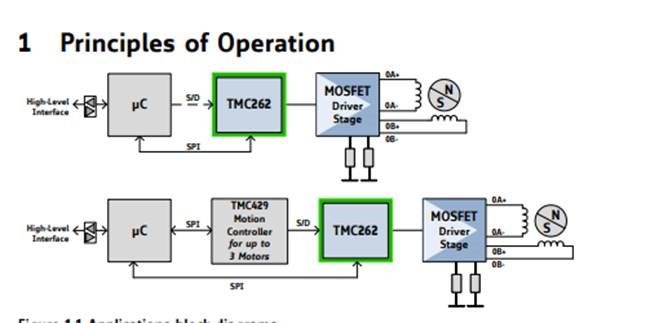
Michael B. schrieb: > also 2.97 x > 1.414 = 4.2A, also irgendwie so was OK, da sind dann integrierte Chips nicht mehr zu finden am Markt. Wäre dann wohl eher ein TMC262+FETs mit vorgeschalteten Controller. Da das Timing für 4 Motore in einen uC mit anderen Aufgaben auch noch spannend wäre?
Angehängte Dateien:
-

Platine.png
12 MB
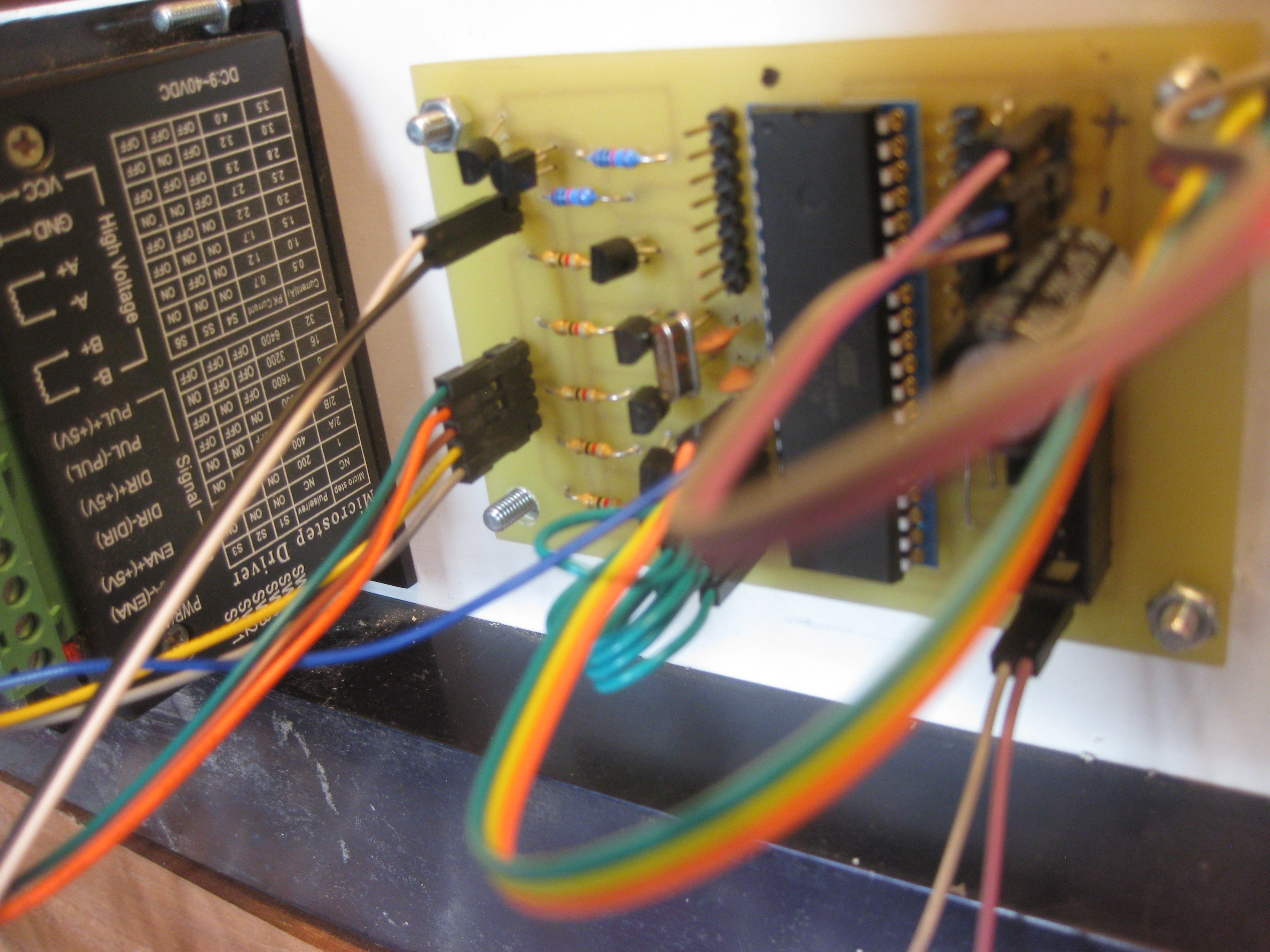
Hallo, Du musst Dir überlegen, wie schnell der Motor sich drehen soll. Stell Dir eine Wicklung wie eine Reihenschaltung von R und L vor. Steht der Motor, wirkt nur der Widerstand R, L ist =0. Läuft der Motor, wird der Widerstand von L mit zunehmender Drehzahl sehr viel größer. Ganz vereinfacht kann man sich vorstellen, das fertige Motortreiber eine Frequenz auf die Wicklung geben, um sie hochohmig zu machen. (Bitte nicht gleich auseinandernehmen). Ich habe ganz gute Erfahrungen mit dem Treiber links im Bild gemacht. Den hab ich für wenige Euros im China gekauft. Gruß Carsten
Auslegen auf Start aus Stillstand. serial mode: ungefähr 2Ω + 10mH ist die Impedanz, in die der Regler 3A reinchoppern muß.
Carsten-Peter C. schrieb: > Platine.png > 12 MB Hast du schon einmal überlegt, warum Fotos als JPG und nicht im PNG-Format hochgeladen werden sollen? (s. Hinweis zu Dateianhängen). Ein minimales technisches Verständnis hätte ich hier im Forum nun wirklich erwartet. Das Bildrauschen deiner Kamera interessiert hier niemanden.
Carsten-Peter C. schrieb: > Steht der Motor, wirkt nur der Widerstand R, L ist =0. p.s. Unsinn, die Induktivität L des Motors ändert sich nicht, wenn der Motor steht. Einzig die Stromänderung ist 0.
Forist schrieb: > Hast du schon einmal überlegt, warum Fotos als JPG und nicht im > PNG-Format hochgeladen werden sollen? Hallo, Du hast Recht, für ein neues Bild hätte ich jpg genommen. Das Bild hatte ich noch und da war es mir egal. Forist schrieb: > Unsinn, die Induktivität L des Motors ändert sich nicht, wenn der Motor > steht. Du hast Recht, die Induktivität ändert sich mit steigender Frequenz natürlich nicht, der Wechselstromwiderstand schon. Im Beispiel der „Ersatzschaltung“ der Wicklung durch ein R und ein L hab ich mehr an den Widerstand von R und L gedacht. Mike weis sicher, was ich meine. Gruß Carsten
Danke für die Ausführungen. Also wohl weiter planen mit TMC Controller. Das kommt aber ganz schön zusammen. Für 4 Motor: 4Stk TMC262, 2 TMC429 und 32 FET. Sind locker 50€ nur für die Endstufe.
Carsten-Peter C. schrieb: > Hallo, Du hast Recht, für ein neues Bild hätte ich jpg genommen. Das > Bild hatte ich noch und da war es mir egal. Das ist doch wohl eine faule Ausrede. In (fast?) allen Bildbearbeitungsprogrammen lässt sich ein Bild im JPG-Format abspeichern.
Hallo, vielleicht ist der Toshiba TB6600 auch wes für Dich. Den kannst Du über ein Mäuseklavier einstellen. https://www.reichelt.de/de/de/schrittmotortreiber-fuer-nema-23-18-50-v-act-dm542-p237924.html?SHOW=1&SID=95d4ef60b1906c09438f9de4020c4144e762a25d546dfccfad97a&&r=1 https://www.roboter-bausatz.de/p/schrittmotortreiber-tb6600-4a-9-42v Vielleicht kaufst Du erst mal einen, um ihn zu testen. Viel Erfolg Carsten
Carsten-Peter C. schrieb: > Hallo, vielleicht ist der Toshiba TB6600 auch wes für Dich Danke, aber das ist mir schon zu integriert. Da habe ich ja nichts zum Aufbauen und Kaputt machen :)
Hallo, was ist denn mit selbst bauen? Mit 4 Mosfets, einem passendem Netzteil und einem ATtiny o.Ä. kriegt man den Motor schon zum drehen. Ich bin dabei einen Treiber für einen 5-Phasen Motor zu basteln, weil die einfach teuer sind. Der wird sehr flexibel steuerbar sein. Ich kann Dich nur ermuntern das zu machen. Das macht einfach Spaß. Gruß Carsten
Hallo Mike, Mike schrieb: > * An sich soll die Ansteuerung serial-bipolar erfolgen. Wie wäre hier > die Herangehensweise für den Treiber-Chip? Mein Weg wäre über die > Leistung von 2.97A²*2 Ohm wären rund 18 Watt. Wenn ich die Endstufe nun > mit 24V betreiben wären es eigentlich nur mehr 0.75A. Dafür gibt es ja > integrierte Endstufen wie den DRV8425 von TI?! Damit verschenkst du gegenüber dem bipolar-parallelen Betrieb Drehmoment im oberen Drehzahlbereich. Wenn der Motor nur langsam laufen soll ist das egal, ansonsten ist es keine gute Idee. Du must deinen Treiber nicht auf den Strom vom Netzteil zum Treiber auslegen, sondern auf den Motornennstrom, und zwar den Peak-Wert. In diesem Fall also 2,97A*sqrt(2)=4,2A. Bei deiner Rechnung zur Verlustleistung (18W, siehe oben) hast du im übrigen die 2. Phase vergessen. Und wie schon erwähnt kommt noch die mechanisch abgegebene Leistung (lastabhängig) hinzu. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Damit verschenkst du gegenüber dem bipolar-parallelen Betrieb Drehmoment > im oberen Drehzahlbereich. Wenn der Motor nur langsam laufen soll ist > das egal, ansonsten ist es keine gute Idee. > > Du must deinen Treiber nicht auf den Strom vom Netzteil zum Treiber > auslegen, sondern auf den Motornennstrom, und zwar den Peak-Wert. In > diesem Fall also 2,97A*sqrt(2)=4,2A. > > Bei deiner Rechnung zur Verlustleistung (18W, siehe oben) hast du im > übrigen die 2. Phase vergessen. Und wie schon erwähnt kommt noch die > mechanisch abgegebene Leistung (lastabhängig) hinzu. Danke für die Tipps
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.