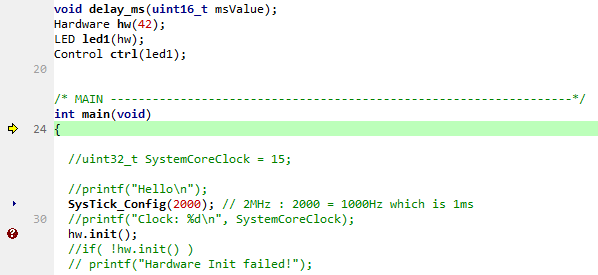
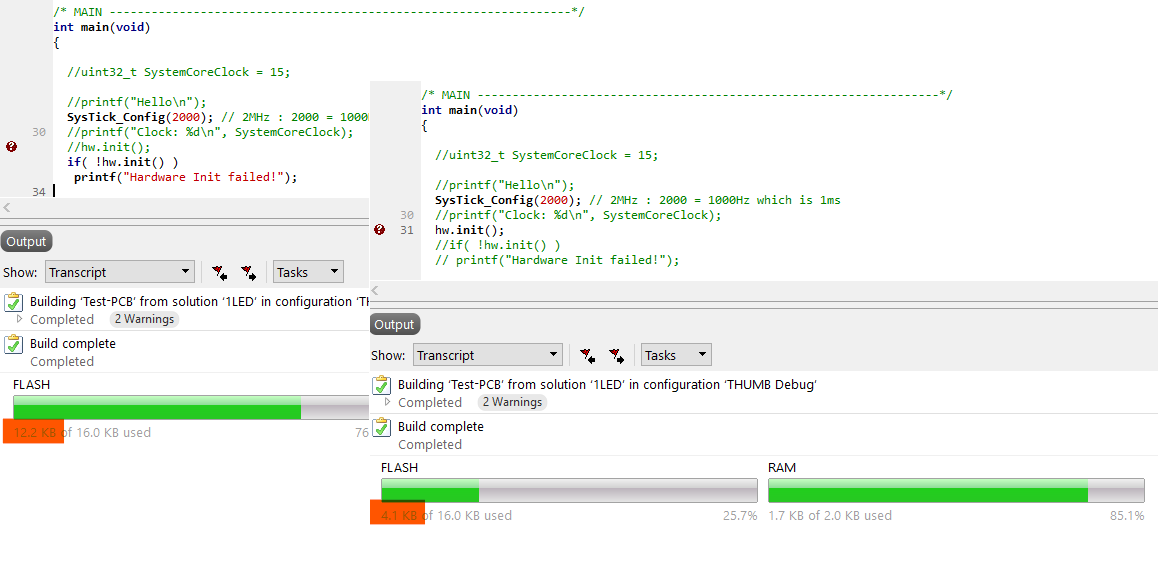
Hallo, Ich nutze Rowley Crossstudio und habe ein paar merkwürdige Sachen festgestellt: Zum einen wird der compilierte Code aufgebläht, wenn ich die "hw.init()" in die if-Abfrage packe und weiterhin kann ich für diesen Schritt keinen Breakpoint setzen. Der Code läuft aber sauber durch beim Debugging. Und die Anweisungen innerhalb der init() werden auch alle abgearbeitet bzw. kann ich dort Breakpoints setzen. Evtl. hängen beide Sachen zusammen? "Hardware" ist meine Hardware-Klasse, in der alle Sub-Hardware-Klassen instanziiert werden. Hannes
Angehängte Dateien:
-

Breakpoint.png
7,2 KB -

Code-Groessen.png
34 KB
Der zusätzliche Code dürfte vom printf() stammen. Wie sieht es aus wenn das if nicht verwendet wird und trotzdem ein print()?
Hi Jojo, Negativ, Größe bleibt bei ~4KB mit printf() Das wär doch auch enorm viel für so ne kleine Funktion.
Dann das mapfile generieren lassen und gucken wo der Speicher verbraten wird.
Johannes H. schrieb: > Hi Jojo, > Negativ, Größe bleibt bei ~4KB mit printf() > Das wär doch auch enorm viel für so ne kleine Funktion. Nö, das ist normal. Da ist doch eine Menge Krams drin, alleine für die Formatbehandlung.
Bzw wenn der BP nicht gesetzt werden kann dann ist das ein Zeichen das der Code wegoptimiert wurde. Dann wäre was mit der Hardware Klasse faul. Mit dem if wird der return Wert gebraucht und das init wird eingebaut. Dann braucht das init() so viel Speicher.
PittyJ schrieb: > Nö, das ist normal. > Da ist doch eine Menge Krams drin, alleine für die Formatbehandlung. Aber die Codegröße BLEIBT doch bei dem niedrigem Wert, wenn ich einfach per printf() einen Text ausgebe. 🙁 @Jojo Meinst Du dieses mit map-File? Also das mit dem init verstehe ich nicht, denn deren Inhalt wird doch angesprungen. Für mich sieht das auch aus, als würde das wegoptimiert, deswegen verwirrt mich das auch so.
printf() wird bei einem konstanten String zu einem puts().
Johannes H. schrieb: > Meinst Du dieses mit map-File? ja. Amap ist ein kleines Tool um das etwas übersichtlicher zu machen: https://www.sikorskiy.net/info/prj/amap/#download Danach sind .text und .rodata ca. 4 kB groß, da ist vielleicht nur die Rowley Anzeige falsch. Kann auch am Linkerfile liegen das es ein padding zwischen sections gibt und dann Luft mitgezählt wird. Mit dem objsize tool der gcc kann man auch die Größe anzeigen lassen (wenn Rowley das nicht auch nutzt). Johannes H. schrieb: > Also das mit dem init verstehe ich nicht, denn deren Inhalt wird doch > angesprungen. ja richtig, hatte ich jetzt überlesen.
Die verwendete Toolchain ist aber auch sehr alt, 4.8 sagt das mapfile. Ist das eine mitgelieferte und kann man die durch eine neuere ersetzen? Gerade für C++ würde ich das machen. Die Cortex-M0 werden von gcc auch stiefmütterlich behandelt und optimieren schlecht.
Im map-File scheint die größte Adresse im Flash zu sein:
1 | 0x000000000800110c __fast_load_start__ = ALIGN (__ARM.exidx_end__, 0x4) |
Also ganze 4364 Bytes. Ich vermute auch dass die IDE die Flashnutzung falsch anzeigt. Selbst das binutils "size" Tool macht das nicht besonders gut. Aufklärung gibt hier, sich die Sections im Detail mittels
1 | arm-none-eabi-readelf -S Programmdatei.elf |
o.ä. ausgeben zu lassen. In der Ausgabe alles raussuchen was im Bereich "08000000" liegt, und die Größe aufsummieren (typischerweise gibt es da ".text", ".rodata", ".isr_vector" u.a.). Das resultiert in der korrekten Flash-Nutzung. Ca. 1 KB wird für Library-Funktionen benutzt, inkl. printf, malloc und Floating-Point-Funktionen.
Angehängte Dateien:
-

breakpoint_2.png
5,1 KB -

systick_config.png
8,2 KB
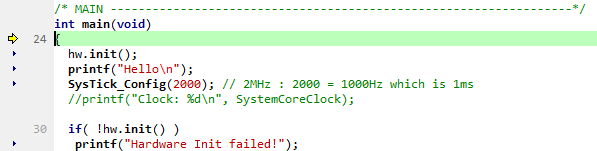
J. S. schrieb: > Die verwendete Toolchain ist aber auch sehr alt, 4.8 sagt das mapfile. Nee, 4.8.8 ist die aktuelle Version für die ARM-Entwicklung, die ich nutze. Auf was beziehst Du dich da mit dem "sehr alt"? Danke für die Hinweise zur Speicherberechnung 👍 Gibt es noch Ideen, warum der Breakpoint nicht gesetzt werden kann? Ich habe mal die hw.init() direkt an den Anfang der main gesetzt. Nun taucht da plötzlich das kleine blaue Dreieck an der Zeile auf 🤔 Seltsam ist auch, dass beim Überspringen von "SysTick_Config()" mit "Step Over", der Debugger immer in die Funktion in der "CMSIS_5\CMSIS\Core\Include\core_cm0plus.h" reinspringt, außer ich setze einen Breakpoint an anderer Stelle und lass den µC laufen. Wie kann ich das vermeiden?
Johannes H. schrieb: > Nee, 4.8.8 ist die aktuelle Version für die ARM-Entwicklung, die ich > nutze. Auf was beziehst Du dich da mit dem "sehr alt"? Version 4.8 ist von 2013-2015 Meine wenige Monate alte Cube IDE von ST enthält Version 10.3.1
Habe es gecheckt, das ist die CrossWorks Version, die enthält gcc 10.3, ist also frisch. Ist die Optimierung im debug build auch aus?
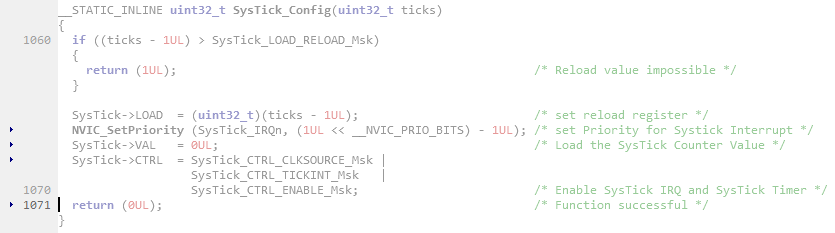
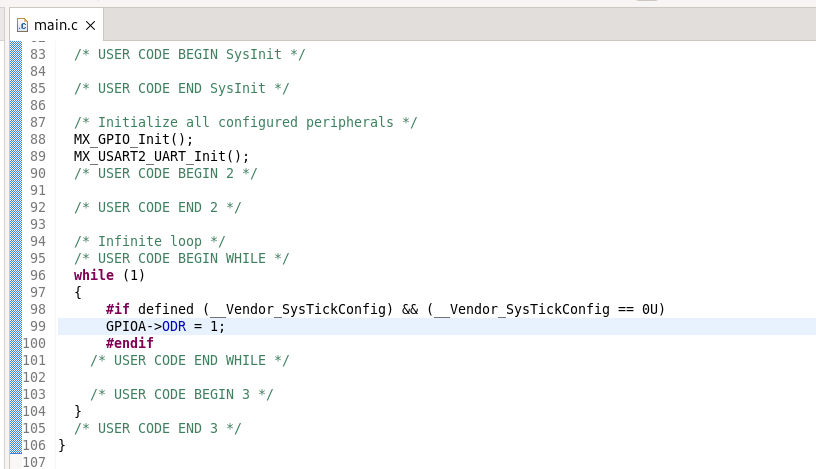
Hi Jojo, Also ich habe Optimization auf "Debug" gesetzt und das Debugging Level auf 3. @stefanus Du hast doch das schöne STM-Tutorial gemacht. Hast Du auch ein Szenario, wo der Debugger in die SysTick_Config reinspringt? Die "__Vendor_SysTickConfig" wird ja in der "STM32L011xx.h" definiert mit 0 und steht in der Datei bevor "core_cm0plus.h" includiert wird. Der Code nach
1 | #if defined (__Vendor_SysTickConfig) && (__Vendor_SysTickConfig == 0U)
|
ist bei mir aber ausgegraut, obwohl die Bedingung doch wahr ist. Hast Du da ne Idee?
Angehängte Dateien:
-

2022-11-12_16-55.png
47 KB
Johannes H. schrieb: > Hast Du auch ein Szenario, > wo der Debugger in die SysTick_Config reinspringt? Habe ich noch nicht probiert, das brauchte ich bisher nicht. Johannes H. schrieb: > ist bei mir aber ausgegraut Bei mir nicht. Ich habe einfach ein Projekt mit Standardvorgaben für den STM32L011K4Tx erstellt und diese drei Zeilen eingefügt.
wenn man nicht sicher ist ob der Code im #if kompiliert wird, dann kann man da ein #error einfügen. An der Stelle muss der Compiler dann meckern.
Johannes H. schrieb: > ist bei mir aber ausgegraut, obwohl die Bedingung doch wahr ist. > Hast Du da ne Idee? Viele IDE sind nicht besonders gut darin festzustellen, ob Bedingungen des Präprozessors erfüllt sind. Generell lässt sich in SysTick_Config() ganz normal ein Breakpoint setzen und hineingucken.
SysTick_Config ist im Mapfile nicht zu finden, da kocht Rowley vielleicht sein eigenes Süppchen. Das define kann ja auch an anderer Stelle umgebogen werden.
J. S. schrieb: > SysTick_Config ist im Mapfile nicht zu finden Ist static inline. Bei mir ist es in der core_cm4.h, aber bei anderen MCUs wird es wohl woanders liegen.
Wenn die IDE sich weigert Breakpoints zu setzen kann man auch die Holzhammermethode anwenden und den Breakpoint manuell im Code setzen mit
1 | __BKPT (); |
oder
1 | __asm__ volatile ("BKPT #0"); |
Der wird dann garantiert ausgelöst wenn der Code ausgeführt wird.
Walter T. schrieb: > Ist static inline. ok, damit wird aber auch kein Symbol dafür angelegt und dann kann der BP da auch nicht gesetzt werden.
Nicht an der Funktion, aber in der dritten Zeile der Funktion. (Die erste Zeile wird wegoptimiert.)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.