Hallo! Ich habe eine Frage an alle Servo Profis hier. Ich habe meinem Sohn Klappziele gebaut die er mit seinem Bogen umschiessen kann. Das sind im Grunde nur Alubleche mit einer Länge von 200 mm vom Drehpunkt aus. Hierfür habe ich 4 Servos gekauft und dachte dass diese 3 Leitungen so funktionieren: Masse, Plus, Signal. Kurz gesagt dachte ich Dauerstrom und Masse damit der Servo auch zurück kann, Signal plus setzt ihn in Betrieb bis Endstellung und wenn ich das Signal unterbreche fährt er zurück. Das war wohl etwas naiv von mir. Gibt es eine Möglickeit die Servos mit einem Taster alle gleichzeitig zum Endpunkt zu fahren und dass sie beim Loslassen wieder zurück fahren? Ich habe 3 Leitungen, PWM, Masse und +5V Die Bezeichnung der Servos ist MG996R. Ich hoffe ihr könnt mir helfen, ich wollte ihm die Ziele zu Weihnachten schenken.
Sven schrieb: > Gibt es eine Möglickeit die Servos mit einem Taster alle gleichzeitig > zum Endpunkt zu fahren und dass sie beim Loslassen wieder zurück fahren? Nein, du musst schon dazu passende Signale erzeugen. Wer programmieren kannst, kriegt das mit einem Arduino Nano schnell erledigt. Oder du kaufst einen Servo-Tester und ersetzt dessen Potentiometer durch einen Schalter und zwei ausgewählte Festwiderstände (die die richtigen Drehwinkel ergeben). Schenke ihm einen Arduino Nano, dann lernt er was dabei. https://www.youtube.com/watch?v=-VYnC3NDRFs
Stefan F. schrieb: > Oder du kaufst einen Servo-Tester und ersetzt dessen Potentiometer durch > einen Schalter und zwei ausgewählte Festwiderstände (die die richtigen > Drehwinkel ergeben). Stimmt genau, dies ist die beste Lösung. Kannst Du auch leicht selbst bauen: Google-Bildersuche nach "servotester 555"
Sven schrieb: > Gibt es eine Möglickeit die Servos mit einem Taster alle gleichzeitig > zum Endpunkt zu fahren und dass sie beim Loslassen wieder zurück fahren? Die üblichen Modellbauservos werden mittels PPM-Signal (nicht zu verwechseln mit PWM) angesteuert und nicht mit einem analogen Spannungswert. Dementsprechend musst Du das Timing für beide Endlagen erzeugen. Früher(tm) hätte man das auf analogem Wege gemacht, heutzutage meist per Mikrocontroller. https://de.wikipedia.org/wiki/Puls-Pausen-Modulation Die Erzeugung von PPM-Signalen dürfte eines der am häufigsten diskutierten Themen in Modellbaukreisen sein. Jede Suchmaschine liefert dermaßen viele Treffer (auch bei mikrocontroller.net), dass es wenig sinnvoll wäre, hier Links zu veröffentlichen. Achtung: Wenn man das PPM-Signal vom Servoeingang entfernt, bedeutet das nicht unbedingt, dass das Servo automatisch in eine Endlage fährt. Es gibt dann alle Möglichkeiten: Stellung aktiv halten, ohne Antrieb, Fahrt in eine Enlage. Ggf. musst Du ins Datenblatt des konkreten Servos schauen, wie es sich da verhält und ob sich das Verhalten ggf. konfigurieren lässt.
Kann ich mit diesem Arduino alle 4 Servos bei einem Tastendruck fahren oder brauche ich da 4 Stück? Oder kann ich das Signal einfach auf alle 4 Splitten? Was habe ich für Möglichkeiten den Taster anzuschließen? Ich habe im Gehäuse aktuell einen einfachen Schließer vorgesehen.
Sven schrieb: > Oder kann ich das Signal einfach auf alle 4 > Splitten? Könntest Du, aber dann müssen die Endlangen mechanisch justiert werden, weil die Servos sicher etwas unterschiedlich arbeiten. Du solltest sowieso Klappen und Servos mechanisch entkoppeln, weil sonst jeder Einschlag direkt auf das Getriebe geht und dies dann rasch kaputt gehen würde.
Sven schrieb: > Kann ich mit diesem Arduino alle 4 Servos bei einem Tastendruck fahren > oder brauche ich da 4 Stück? Du kannst mit einem Signal alle 4 Servos zusammen gleich ansteuern. Oder du erzeugst 4 Signale, das kann der Arduino Nano auch. Versuche aber nicht, 4 Servos über den USB Port mit Strom zu versorgen. Wenn du Pech hast, brennt die dabei eine Diode auf den Board durch. Ich bin nicht mal sicher ob der USB Port einen Servo versorgen kann. Du hast da ja schon einen besonders starken ausgewählt (warum?). > Was habe ich für Möglichkeiten den Taster anzuschließen? Viele. Für einen Taster reicht aber eine Möglichkeit. > Ich habe im Gehäuse aktuell einen einfachen Schließer vorgesehen. ich weiß nicht wie deine Mechanik aufgebaut ist. Ich nehme mal an, dass die Servos auf Knopfdruck alle einmal hin und wieder zurück fahren sollen, richtig? Kann man so machen. Ich würde in dem Fall die Stromversorgung des Arduino Boardes und der Servos durch den Taster fließen lassen, damit das ganze Ding im Ruhezustand gar keinen Strom aufnimmt. Der Taster muss dazu hoch genug belastbar sein (Stromaufnahme der Motoren beachten).
Angehängte Dateien:
-

140011839010-1.PNG
76 KB

Man hätte auch einfach einen Getriebemotor nehmen können, der die Klappen über eine rotierende Bürste aufrichtet. So ähnlich wie im Anhang, aber mit geraden Bürsten.
Sven schrieb: > Gibt es eine Möglickeit die Servos mit einem Taster alle gleichzeitig > zum Endpunkt zu fahren und dass sie beim Loslassen wieder zurück fahren? Ja, das macht ein Servotester https://www.voelkner.de/products/114357/Servo-Tester-Bausatz-L-x-B-50mm-x-35mm-1St..html an den alle Servos parallel angeschlossen werden, und ein Netzteil kräftig genug fur alle Motoren zusammen. Das Poti kann man durch 2 Festwiderstände ersetzen, einen für die eine Position, den zweiten sazu für die andere Position, die durch deinen Taster verbunden werden.
Stefan F. schrieb: > Du kannst mit einem Signal alle 4 Servos zusammen gleich ansteuern. Das verbaut einem die Möglichkeit, bei den Servos individuelle Positionstoleranzen auszugleichen. Ob man das braucht, hängt von den Servos und den Anforderungen in der Anwendung ab.
Ich habe nun so einen Arduino bestellt. Das ging ist ja richtig cool. Ich hoffe ich schaffe es dann auch programmieren. Nochmal kurz u zu meinen Komponenten: Netzteil hat 6 Ampere und 6 Volt. Die Servos fahren nie auf Widerstand. Ich stelle den Arm zum Aufrichten so ein dass noch Luft bleibt. Sie Ziele kippen ca. 5 grad über den OT. Wenn ich für die Servos Plus und Masse direkt vom Netzteil nehme sollte es passen, oder? Der Taster ist ein Eaton M22-D-G-K10-BVP Drucktaster.
Sven schrieb: > Wenn ich für die Servos Plus und Masse direkt vom Netzteil nehme sollte > es passen, oder? Ja mache das. > Der Taster ist ein Eaton M22-D-G-K10-BVP Drucktaster. Ein edles Teil. Schreibe für den Arduino einen Sketch. Du brauchst nur die setup() Funktion zu implementieren. Sie soll den Servo einmal hin und wieder zurück drehen. Dann endet das Programm. Die loop() Funktion bleibt leer. Du kannst das Programm durch Druck auf den Reset Taster erneut starten. Den edlen Drucktaster schließt du an den Reset-Eingang und GND vom Arduino Board an, so dass du das Programm auch damit neu starten kannst. Bedenke folgendes: Wenn dein Sketch eine neue Servo-Position vorgibt, musst du dem Servo Zeit geben, dort hin zu fahren. Zum Beispiel zwei Sekunden. Also wird dein Sketch ungefähr so aussehen:
1 | #include <Servo.h> |
2 | |
3 | Servo servo; |
4 | |
5 | void setup() |
6 | {
|
7 | servo.attach(8); // Servo an digital Pin 8 |
8 | servoblau.write(20); // Auf 20° drehen |
9 | delay(2000); // warten |
10 | servoblau.write(160); // Auf 160° drehen |
11 | delay(2000); // warten |
12 | }
|
13 | |
14 | void loop() |
15 | {}
|
Nachdem das mit einem Servo klappt, schließt du die anderen Servos an an das selbe Steuersignal an.
Schon mal vielen Dank! Ich warte jetzt bis der Arduino da ist und probiere es aus. Ich melde mich dann nochmal
> servoblau
Ersetze das bitte durch "servo". Da habe ich zu viel von einer Vorlage
kopiert.
Stefan F. schrieb: >
1 | > #include <Servo.h> |
2 | >
|
3 | > Servo servo; |
4 | >
|
5 | > void setup() |
6 | > { |
7 | > servo.attach(8); // Servo an digital Pin 8 |
8 | > servoblau.write(20); // Auf 20° drehen |
9 | > delay(2000); // warten |
10 | > servoblau.write(160); // Auf 160° drehen |
11 | > delay(2000); // warten |
12 | > } |
13 | >
|
14 | > void loop() |
15 | > {} |
16 | >
|
Und das ist jetzt der tolle Lerneffekt bei einem Arduino? Das einzig interessante wird aus einer fertigen Lib benutzt? Dann hätte man auch den Servotester von der Stange nehmen können. Aber was solls, die Welt ist eh am Arsch; dann wenigstens hier noch die Lib Beschreibung: https://www.arduino.cc/reference/en/libraries/servo/
:
Bearbeitet durch User
Angehängte Dateien:
-

20221211_012514.jpg
83 KB -

20221211_140316.jpg
190 KB
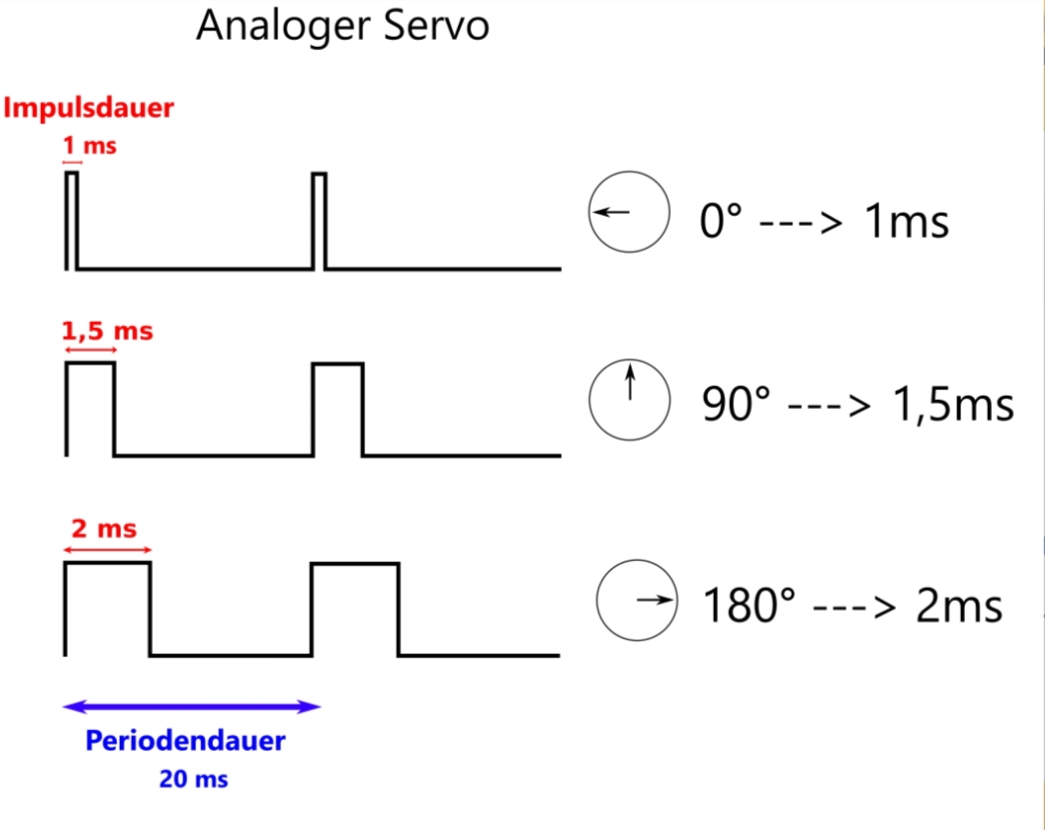
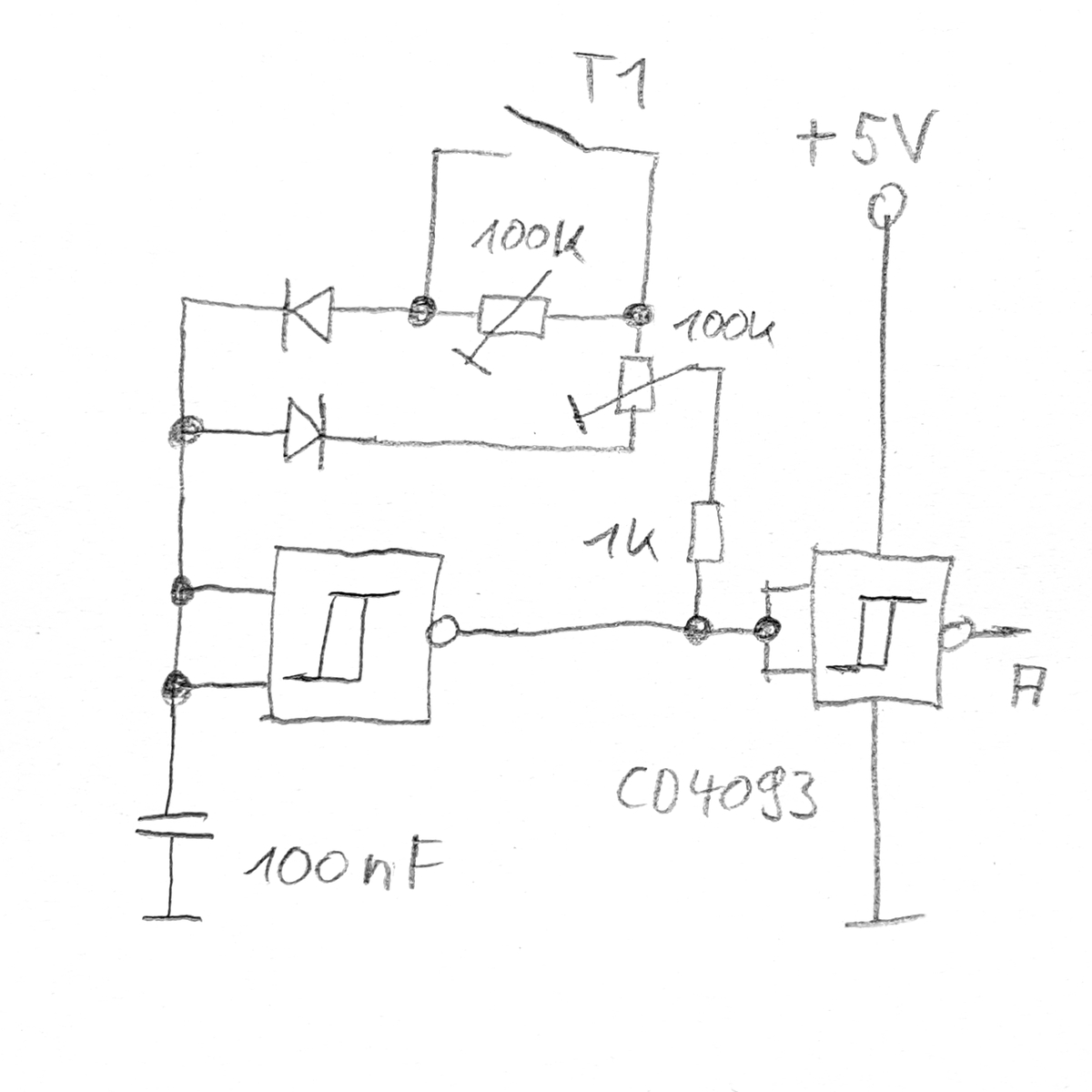
Sven schrieb: > Gibt es eine Möglickeit die Servos mit einem Taster alle gleichzeitig > zum Endpunkt zu fahren und dass sie beim Loslassen wieder zurück fahren? So einen Servotester kann man sich auch fluxartig am Sonntag Nachmittag nach Kaffee und Kuchen eben schnell aus der Bastelkiste zusammenbauen. Mit einem CD4093 einen 50 Hz Rechteckgenerator aufbauen und die beiden Trimmer so einstellen, dass man die Pulsweite durch Drücken des Tasters T1 zwischen 1ms und 2ms umschalten kann.
Andreas S. schrieb: > Die üblichen Modellbauservos werden mittels PPM-Signal […] angesteuert Nein, sie werden per PWM angesteuert, und entsprechend einfach könnte man sich den Kram nachbauen. PPM war das Modulationsverfahren der Funktechnik, der Empfänger macht daraus das PWM-Signal für die Servos. Heutzutage kommt PPM noch als Summensignal zur Anwendung, etwa wenn man alle Kanäle aus einem Empfänger gesammelt an ein anderes Device (z.B. FBL-System) weiterleiten möchte.
Tim T. schrieb: > Und das ist jetzt der tolle Lerneffekt bei einem Arduino? Das er mal einen Mikrocontroller ans Laufen gebracht hat. Vielleicht animiert ihn das dazu, mehr in diese Richtung zu machen. > Das einzig interessante wird aus einer fertigen Lib benutzt? Na und? Am Ende geht es darum, den Schießstand zu bauen. > Dann hätte man auch den Servotester von der Stange nehmen können. Ach was! Schau mal wer den Servotester empfohlen hat. Der Servotester von der Stange hat allerdings nicht zwei einstellbare Positionen, die er automatisch im richtigen Timing wechselt. Da muss man schon noch etwas drumherum bauen.
Stefan F. schrieb: > > Bedenke folgendes: Wenn dein Sketch eine neue Servo-Position vorgibt, > musst du dem Servo Zeit geben, dort hin zu fahren. Zum Beispiel zwei > Sekunden. Also wird dein Sketch ungefähr so aussehen: 2 Sekunden? Schau mal in die Fakten Geschwindigkeit: 0,13 sec/60 Grad bei 6,0 V Macht 390ms für 180° Die Frage wäre da eher ob man das Servo "digital" ansteuern möchte so wi im Programmierbeispiel, also von Endlage zu Endlage. Oder ob man es soft mit der Ausgabe dahin bewegt um die Mechanik nicht zu überfordern. Man könnte auch prüfen ob sich das Servo programmieren läßt und somit die Verfahrgeschwindigkeit auf z.B. 1.3s/60° reduzieren läßt. Dann wäre das Endlagenanfahren einfach ohne das es Vmax nutzt. Ob der Aufwand lohnt muß der TO wissen.
Jack V. schrieb: > Andreas S. schrieb: >> Die üblichen Modellbauservos werden mittels PPM-Signal […] angesteuert > > Nein, sie werden per PWM angesteuert, und entsprechend einfach könnte > man sich den Kram nachbauen. PPM war das Modulationsverfahren der > Funktechnik, der Empfänger macht daraus das PWM-Signal für die Servos. > Heutzutage kommt PPM noch als Summensignal zur Anwendung, etwa wenn man > alle Kanäle aus einem Empfänger gesammelt an ein anderes Device (z.B. > FBL-System) weiterleiten möchte. Nein, eigentlich ist PDM (Puls Dauer Modulation) richtig, die Dauer des ON Pulses bestimmt die Stellung, nicht die Pause. Die Pause muss lediglich in einem akzeptablen Bereich liegen. Dadurch hat es sich eingebürgert das mit einer PWM zu machen, dabei die Gesamt Periodendauer auf 20 ms zu legen und eine ON-Tastung von 1-2 ms zu nutzen. Allerdings sind dabei wie gesagt die ON-Zeiten entscheidend, nicht die Pause und damit auch nicht die 20 ms.
:
Bearbeitet durch User
NichtWichtig schrieb: > Schau mal in die Fakten Die Fakten bestätigen, dass die "zum Beispiel" zwei Sekunden Pause genug sind. Ein bisschen Reserve hat noch niemandem geschadet. Da es programmierbar ist, kann der TO es sich leicht so einrichten, wie er es haben will. > Die Frage wäre da eher ob man das Servo "digital" ansteuern möchte so wie > im Programmierbeispiel, also von Endlage zu Endlage. Die Frage hat der TO schon beantwortet. Die genauen Positionen wird er selbst heraus finden.
Angehängte Dateien:
-

20221211_142202.jpg
230 KB
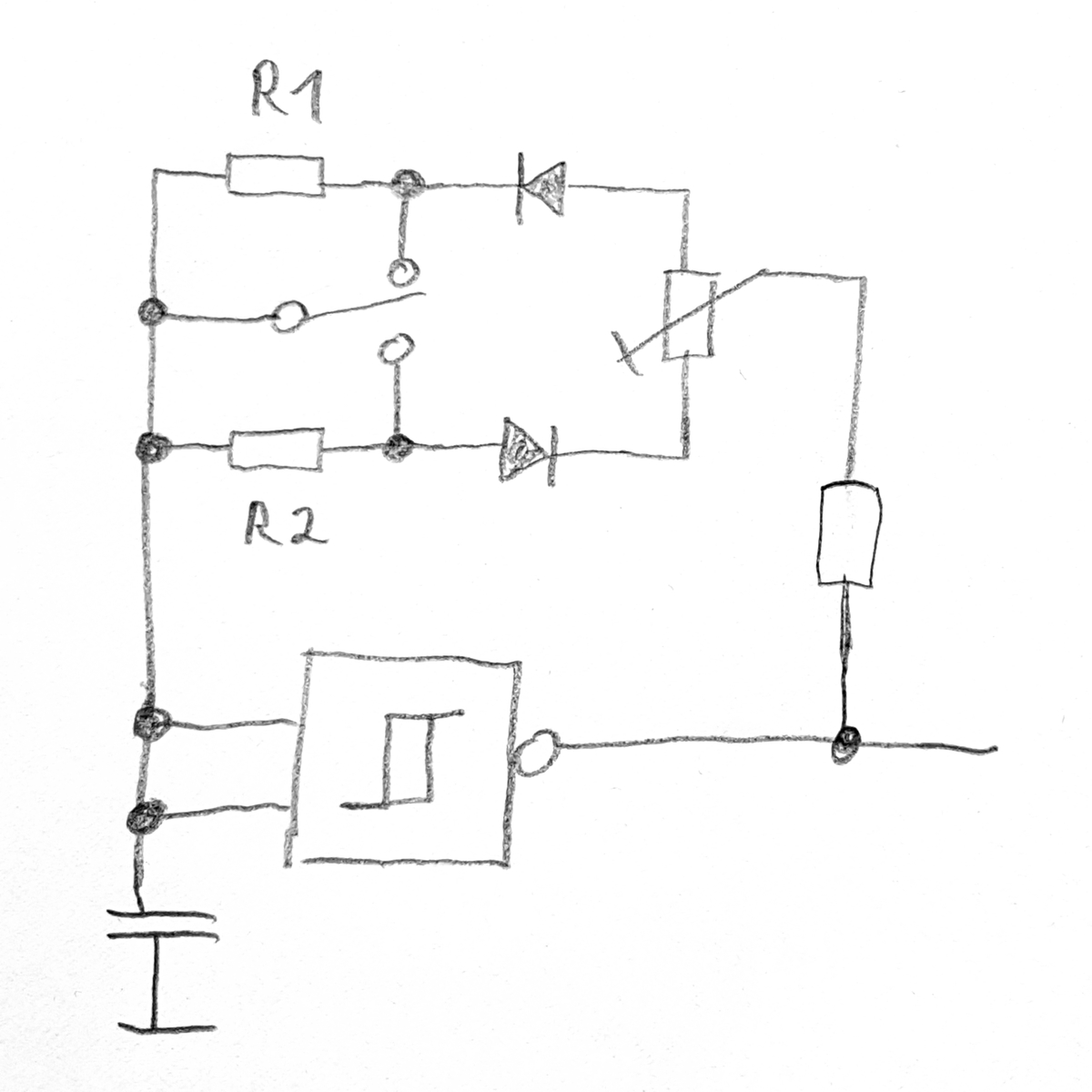
Michael M. schrieb: > ...und die beiden Trimmer so einstellen, dass man die Pulsweite durch > Drücken des Tasters T1 zwischen 1ms und 2ms umschalten kann. Ich sehe gerade, das der Taster ein 1xUM Taster sein muss, sonst verändert sich beim Drücken die Frequenz. R1 und R2 müssen gleich groß sein!
Tim T. schrieb: > Nein, eigentlich ist PDM (Puls Dauer Modulation) richtig, die Dauer des > ON Pulses bestimmt die Stellung, nicht die Pause. Die Pause muss > lediglich in einem akzeptablen Bereich liegen. Naja, die Pause ist bei gegebener Pulsbreite vorgegeben, weil die Servos mit einer festen Frequenz angesteuert werden. Letztlich ist die Pulsdauer nichts Anderes, als der Duty-Cycle bei einer PWM in der gegebenen Frequenz. Man kann entsprechend die PWM-Funktionen von Microcontrollern nehmen, oder sich selbst was mit ’nem Timer schnitzen.
Stefan F. schrieb: > Tim T. schrieb: >> Und das ist jetzt der tolle Lerneffekt bei einem Arduino? > > Das er mal einen Mikrocontroller ans Laufen gebracht hat. Vielleicht > animiert ihn das dazu, mehr in diese Richtung zu machen. Eben genau das passiert ja nicht, Papa kopiert wild etwas aus dem Internet zusammen und verändert eventuell noch ein paar Werte, das wars, der Rest verschwindet in einer Kiste. >> Das einzig interessante wird aus einer fertigen Lib benutzt? > > Na und? Am Ende geht es darum, den Schießstand zu bauen. Dann muss man aber nicht den Arduino (zum lernen) empfehlen. >> Dann hätte man auch den Servotester von der Stange nehmen können. > > Ach was! Schau mal wer den Servotester empfohlen hat. Schon klar, aber im gleichen Atemzug zweimal den Arduino. > Der Servotester von der Stange hat allerdings nicht zwei einstellbare > Positionen, die er automatisch im richtigen Timing wechselt. Da muss man > schon noch etwas drumherum bauen. Ist die Frage wo man hin will, entweder komplett selber was bauen (Tiny und co) oder das Ganze zukaufen (Servotester), der Arduino ist da nicht Fisch und nicht Fleisch, nur der Hype bleibt.
Spart euch die Wortklauberei wegen PWM oder wie auch immer das Signal heisst. Stattdessen könnt ihr euch alte Diskussionen durchlesen, wo das oft genug diskutiert wurde. Da habt ihr Lesestoff für den ganzen Tag. Tim, dein Arduino Bashing ist hier ebenfalls völlig fehl am Platz. Benutze etwas anderes und sei damit glücklich. Dem TO hilft es nicht.
Beitrag #7282160 wurde von einem Moderator gelöscht.
Jack V. schrieb: > Tim T. schrieb: >> Nein, eigentlich ist PDM (Puls Dauer Modulation) richtig, die Dauer des >> ON Pulses bestimmt die Stellung, nicht die Pause. Die Pause muss >> lediglich in einem akzeptablen Bereich liegen. > > Naja, die Pause ist bei gegebener Pulsbreite vorgegeben, weil die Servos > mit einer festen Frequenz angesteuert werden. Letztlich ist die > Pulsdauer nichts Anderes, als der Duty-Cycle bei einer PWM in der > gegebenen Frequenz. Man kann entsprechend die PWM-Funktionen von > Microcontrollern nehmen, oder sich selbst was mit ’nem Timer schnitzen. Schon klar, nur muss die Frequenz nicht fest sein, du kannst auch einen Puls von 1-2 ms erzeugen und danach z.B. immer 15 ms Pause machen, so das du auf eine Gesamtzeit von 16-17 ms kommst.
Stefan F. schrieb: > Spart euch die Wortklauberei wegen PWM oder wie auch immer das Signal > heisst. Stattdessen könnt ihr euch alte Diskussionen durchlesen, wo das > oft genug diskutiert wurde. Da habt ihr Lesestoff für den ganzen Tag. > > Tim, dein Arduino Bashing ist hier ebenfalls völlig fehl am Platz. > Benutze etwas anderes und sei damit glücklich. > > Dem TO hilft es nicht. Hier im Forum geht es aber nicht ums helfen, hier macht jeder eben worauf er bock hat. Hast du das immer noch nicht verstanden?
Tim T. schrieb: > Hier im Forum geht es aber nicht ums helfen, hier macht jeder eben > worauf er bock hat. Hast du das immer noch nicht verstanden? Schau mal in den Spiegel. Du bist hier derjenige, der Arduino nicht mag und demnach sowohl meine Empfehlung als auch die Entscheidung des TO verurteilst. Mit geht es sehr wohl ums Helfen.
Tim T. schrieb: > nur muss die Frequenz nicht fest sein, du kannst auch einen > Puls von 1-2 ms erzeugen und danach z.B. immer 15 ms Pause machen, so > das du auf eine Gesamtzeit von 16-17 ms kommst. Ich kann mir gut vorstellen, dass das die modernen Servos nachhaltig aus dem Tritt bringt. Aber ich hab’s mir mal zum Testen aufgeschrieben, interessiert ja auch. Was aber wenig Anlass zur Diskussion geben sollte: in ihrem natürlichen Umfeld werden die Servos mit den vorgegebenen Pulsdauern und in einer vorgegebenen, fixen, Frequenz angesteuert; im Oszi ist das Signal daher nicht von PWM zu unterscheiden, und man kann die Dinger umgekehrt mit einem handelsüblichen PWM-Signal ansprechen, solange es nur innerhalb der spezifizierten Parameter ist. Stefan F. schrieb: > Spart euch die Wortklauberei wegen PWM oder wie auch immer das Signal > heisst. So ganz unwichtig ist’s nicht: angenommen, der TE würde nun tatsächlich ein PPM-Signal erzeugen – damit würde er sich schlimmstenfalls das Servo ruinieren. Da’s möglicherweise recht große Ziele sind, und daher keine Servos der 10€-Klasse zum Einsatz kommen, wäre das unter Umständen schon ärgerlich. PWM würde ich hier auch weiterhin als Ausgangspunkt nehmen – finden sich einfach viel mehr Informationen dazu.
Ich freue mich über den Tipp mit dem Arduino. Das scheint mir im Augenblick die für mich beste Lösung zu sein. Ich habe mit Elektronik nicht viel am Hut. Ich habe eine Metallwerkstatt mit allem was dazu gehört. Also Drehen, fräsen, Plasma, Kantbank und Schlagschere. Mit CNC kenne ich mich auch aus. Auch wenn ich zuhause nur NC habe. Das mit dem Umbau von dem Tester war mir ehrlich gesagt etwas zu kompliziert. Ich kenne mich mit Fahrzeugelektrik passabel aus, aber hier irgendwelche Steuerungen umzubauen übersteigt meinen Horizont. Den Arduino programmieren traue ich mir eher zu.
Sven schrieb: > Den Arduino programmieren traue ich mir eher zu. Dachte ich mir. Lass dich nicht von den "Profi" Programmierern entmutigen, die alles selbst entwickeln wollen. Wie in der Mechanik ist es auch beim Programmieren völlig normal und legitim, etwas aus fast fertigen Bauteilen zusammen zu setzen. Man muss nicht alles selber machen und man muss auch nicht alles im Detail verstehen. Vor allem nicht von Anfang an.
Hallo zusammen, der Arduino ist gestern gekommen. Ich habe das Script nun aufgespielt und möchte ihn testen. Nun noch eine Frage bevor ich ihn kaputt mache. Ich habe jetzt den Servo mit rot an +6V, Braun an Masse, gelb an PIN 8 vom Arduino. RST und GND (selbe Seite wie PIN 8, gibt es auch auf der anderen Seite) am Schließer. Nun muss ich den Arduino noch am Netzteil anschließen. Wo mache ich das?
Wie sieht es denn mit diesem Hinweis hier aus? Hermann Kokoschka schrieb: > Du solltest sowieso Klappen und Servos mechanisch entkoppeln, weil sonst > jeder Einschlag direkt auf das Getriebe geht und dies dann rasch kaputt > gehen würde. I.d.R. setzen Servos einer externen Kraft keine Rückstellkraft entgegen, solange kein Steuersignal eintrifft. Trifft das für die verwendeten Servos zu? Denn nur dann lassen sich die Servos bei starrer Ankopplung aus der Position drehen. Selbst wenn die Servos wie gewohnt funktionieren, mögen die keine mechanischen kräftigen Impulse, sondern eher ein langsames Verdrehen. Das sehe ich hier nicht. > mit einer Länge von 200 mm vom Drehpunkt aus. Es müsste eine mechanische Ausrast-Mechanik vorgesehen werden, bei der das Servo nur die Aufgabe der Rückstellung übernimmt. Sven schrieb: > der Arduino ist gestern gekommen. Welches Modell?
Sven schrieb: > RST und GND (selbe Seite wie PIN 8, gibt es auch auf der anderen Seite) > am Schließer. Schliesser ist wohl Taster, warum Taster an Reset ? Kommt mir falsch vor. > Nun muss ich den Arduino noch am Netzteil anschließen. Wo mache ich das? Hauptsache - vom Netzteil mit GND des Arduino und - der 6V verbinden.
Sven schrieb: > Nun noch eine Frage bevor ich ihn kaputt mache ... Ist alles richtig. > Nun muss ich den Arduino noch am Netzteil anschließen. Versorge ihn erst mal nur per USB Kabel. Wenn er funktioniert, kommt das 6V Netzteil später an GND und VIN. Michael B. schrieb: > Schliesser ist wohl Taster, warum Taster an Reset ? Kommt mir falsch > vor. Weil ich ihm das empfohlen habe. Vereinfacht die Programmierung - keine Tastenabfrage nötig.

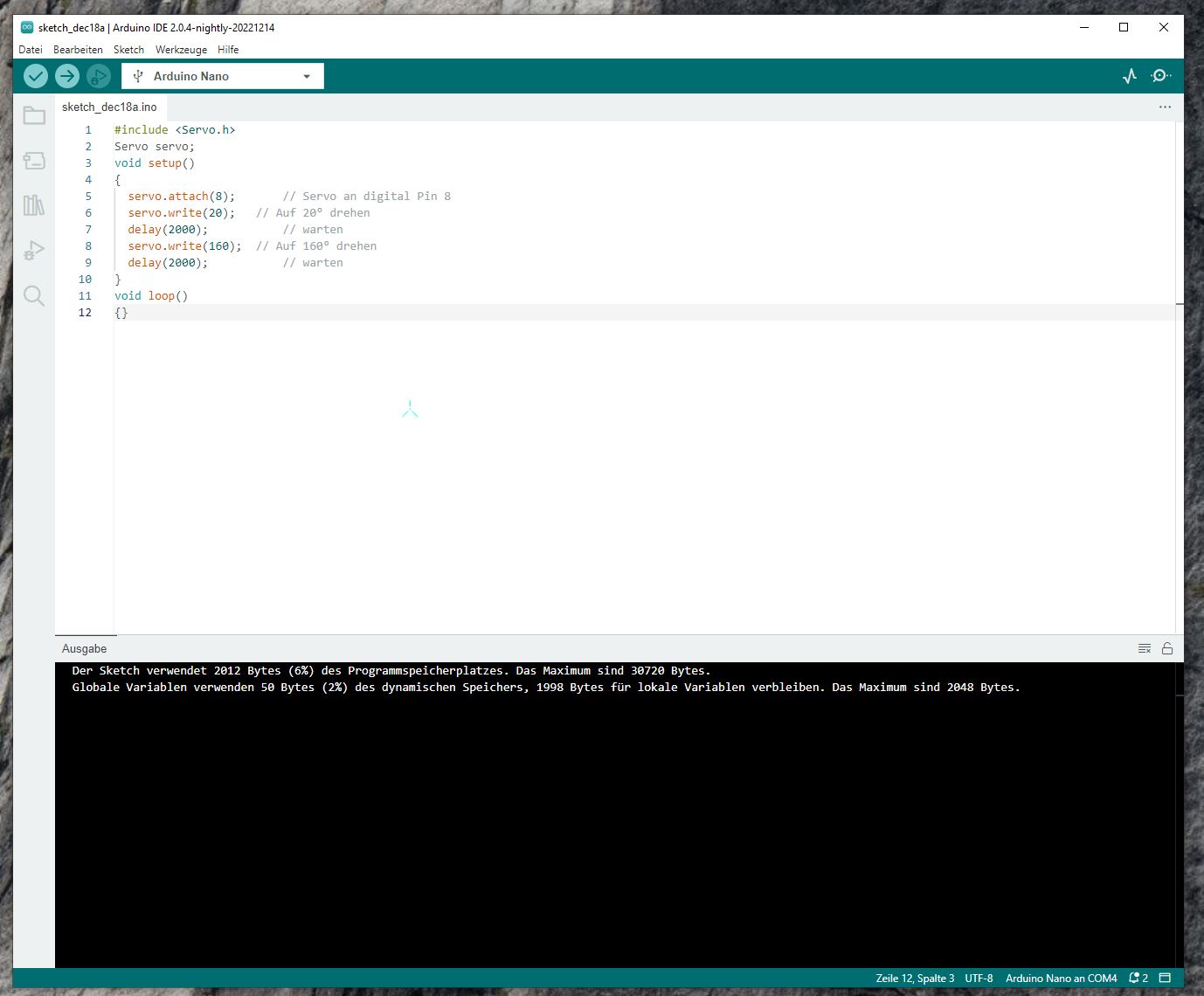
Hallo, die Mechanik ist ganz simpel. Das Ziel fällt um, der Servo soll es wieder aufstellen und in seine Ausgangsposition zurück fahren. siehe Bild 001 (Bild zeigt die gewünschte Endstellung. Nach unten ist später Platz da das noch auf einen Ständer kommt mit einer Blende von Vorne, dies dient nur zur Veranschaulichung des Prinzips) Diesen Arduino Nano hier habe ich: https://www.ebay.de/itm/403900718846 Das Programm habe ich wie folgt aufgespielt: USB war angeschlossen an COM 4. siehe Bild 002
:
Bearbeitet durch User
MWS schrieb: > Es müsste eine mechanische Ausrast-Mechanik vorgesehen werden, bei der das > Servo nur die Aufgabe der Rückstellung übernimmt Der Servo stellt nur die Klappe hoch und fährt dann wieder in seine Ruheposition zurück. Davor und danach hat der Servo sowieso keine mechanische Verbindung mehr mit der Klappe. Da die hochgestellte Klappe ihren Schwerpunkt außerhalb des Drehpunktes hat, kann sie auch nicht von selbst wieder runterklappen (auch nicht bei Windstärke 3)!
Sven schrieb: > Diesen Arduino Nano hier habe ich: > https://www.ebay.de/itm/403900718846 Ganz schön teuer. Ich kenne die aktuellen Preise nicht, aber vor Corona habe ich für für den Preis 5 Boards bekommen.
Ich habe oben geschrieben, dass du die Verbindungen richtig gemacht hast. Aber eine Sache habe ich dabei vergessen zu checken. Michael war so freundlich, darauf zu achten: Michael B. schrieb: > Hauptsache - vom Netzteil mit GND des Arduino und - der 6V verbinden.
1 | + o------------+-------------------o + |
2 | Netzteil 6V | Servo |
3 | - o----+-------|-------------------o GND |
4 | | | |
5 | | | o Signal |
6 | ____|_______|____ | |
7 | | GND VIN | | |
8 | | | | |
9 | | D8 |--------------+ |
10 | |_________________| |
11 | |
12 | Arduino Nano |
Wenn du das Board per USB mit Strom versorgst, ist die GND Verbindung zum Netzteil trotzdem nötig. Wenn du anstelle vom Pin D8 den Pin D13 verwendest, wird das Signal durch eine LED auf dem Board angezeigt. Könnte im Fall einer Fehlersuche nützlich sein. Das Programm muss man natürlich entsprechend geändert werden.
Michael M. schrieb: > Der Servo stellt nur die Klappe hoch und fährt dann wieder in seine > Ruheposition zurück. Davor und danach hat der Servo sowieso keine > mechanische Verbindung mehr mit der Klappe. Gut. Sven schrieb: > Diesen Arduino Nano hier habe ich: > https://www.ebay.de/itm/403900718846 Auch gut, der läuft mit 5V, entsprechend auch die Ausgänge.
Ich habe jetzt Testweise das USB Kabel dran, so funktioniert alles. Sobald ich das Netzteil an VIN anschließe wird es extrem heiß, ich habe sofort als sich etwas Rauch bildete abgesteckt. Über USB geht es nach wie vor. Was mach ich hier falsch? Sind die 6 Volt zu viel?
MWS schrieb: > Auch gut, der läuft mit 5V, entsprechend auch die Ausgänge. Nicht nur der. Alle mir bekannten Servos können mit 3 bis 5 Volt angesteuert werden, auch wenn deren Versorgungsspannung höher ist.
Sven schrieb: > Sobald ich das Netzteil an VIN anschließe wird es extrem heiß, ich habe > sofort als sich etwas Rauch bildete abgesteckt. Messe mal die Spannung von deinem Netzteil und kontrolliere, ob du es falsch herum gepolt hast. Der VIN Anschluss ist für 6 bis 12 Volt vorgesehen. Für weitere Fragen dazu, zeige Fotos von Aufbau, damit exakt klar ist, was du wie angeschlossen hast.
Sven schrieb: > 002.JPG Was soll der Käse? Gesehen: "Wichtige Regeln - erst lesen, dann posten! ... JPG-Format nur für Fotos und Scans ... ... Zeichnungen und Screenshots im PNG- oder GIF-Format hochladen" So kompliziert ist das doch nicht. Wenn man schon keine Ahnung von den Eigenschaften der Graphikformate hat, kann man sich wenigstens an die diesbezüglichen Hinweise halten.
Forist schrieb: > Was soll der Käse? Warum meldest du dich immer ab, um solche sinnlosen Beiträge zu posten?
Angehängte Dateien:
-

003.png
470 KB
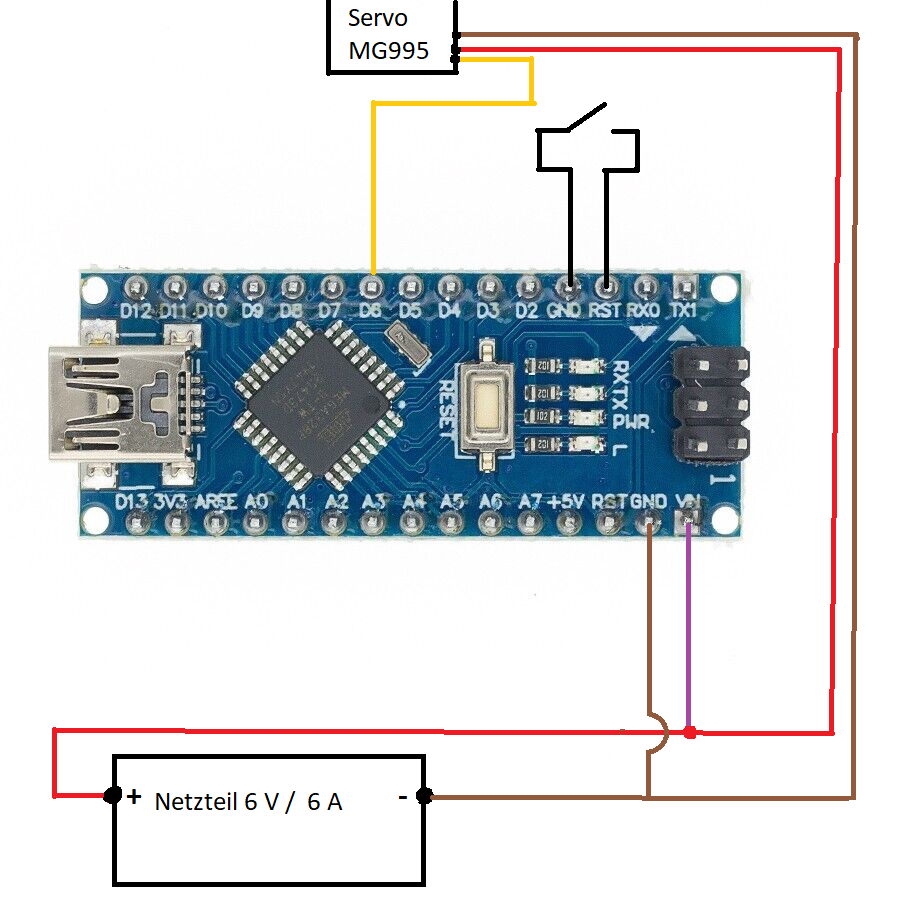
Das Netzteil ist so angeschlossen wie auf der Skizze. Ich mache gerne noch Fotos, aber so erkennt man wahrscheinlich mehr. Sind die 6 Ampere zu viel? Ich habe es nochmal ausprobiert, es wird nach ca. 10 Sekunden heiß. Wenn ich das Kabel zu VIN (Lila in der Skizze) weglasse und das USB Kabel anschließe, geht es.
Sven schrieb: > Das Netzteil ist so angeschlossen wie auf der Skizze. OK > Sind die 6 Ampere zu viel? Das ist die maximale Belastbarkeit des Netzteils. Das Arduino Board nimmt weniger als 0,1 Ampere auf. Wichtiger ist die Spannung, deswegen hatte ich dich gebeten, sie zu kontrollieren. > Ich habe es nochmal ausprobiert, es wird nach ca. 10 Sekunden heiß. Dann kommen aus dem Netzteil wohl viel mehr 12 Volt, oder der Spannungsregler auf dem Board (Rückseite) ist defekt.
Stefan F. schrieb: > Sven schrieb: >> Das Netzteil ist so angeschlossen wie auf der Skizze. > > OK > >> Sind die 6 Ampere zu viel? > > Das ist die maximale Belastbarkeit des Netzteils. > > Das Arduino Board nimmt weniger als 0,1 Ampere auf. Wichtiger ist die > Spannung, deswegen hatte ich dich gebeten, sie zu kontrollieren. Es sind genau 6,34 V > >> Ich habe es nochmal ausprobiert, es wird nach ca. 10 Sekunden heiß. > > Dann kommen aus dem Netzteil wohl viel mehr 12 Volt, oder der > Spannungsregler auf dem Board (Rückseite) ist defekt. Die Hitze entsteht im Bereich der 6 Pins neben den LED´s
Sven schrieb: > Die Hitze entsteht im Bereich der 6 Pins neben den LED´s Auf der anderen Seite ist der Spannungsregler. Mit warmen Worten kann ich ihn dir nicht reparieren.
Ich habe nun ein neues Board bestellt und einen Spannungswandler auf 5 V. Mal sehen was zuerst da ist. Sollte dann aber funktionieren. Dieser Arduino jedenfalls begeistert mich massiv. Ich bin schon am Überlegen was ich mit dem anderen noch realisieren kann. Wenn ich mit meinem jetzigen Projekt fertig bin sende ich auf jeden Fall noch Bilder. Vielen Dank schon jetzt !!!!!!!!!!!!!
Hat dein Netzteil vielleicht 6V AC und nicht DC? Zeig mal das Typenschild vom Netzteil...
Das Netzteil hat Input 110-240 V AC, Output DC 6V, 6A. Das sollte passen. Die Servos laufen ja auch. Ich könnte es über den USB laufen lassen. Aber dann bräuchte ich noch ein Netzteil. Das möchte ich nicht. Vielleicht ist das Board einfach kaputt... Mit 5V geht auf jeden Fall. Ich habe nun das bestellt: https://www.ebay.de/itm/175317246672
:
Bearbeitet durch User
Du hast doch ein Labornetzteil, oder? Hänge das doch mal an GND und VIN und drehe dann die Spannung langsam hoch. Mich würde mal interessieren, ab welcher Spannung der Strom plötzlich ansteigt (über 50mA). Mach den Test einmal mit USB Kabel am PC und einmal ohne. In beiden Fällen ohne Servo.
Noch habe ich keines. Ich frage meinen Nachbar. Sonst kaufe ich eines. Das hätte ich neulich beim Kaffeemaschine reparieren auch schon brauchen können.
Angehängte Dateien:
-

Bild__1_.jpg
30 KB -

Bild__2_.jpg
68 KB -

Bild__3_.jpg
110 KB -

Bild__4_.jpg
62 KB -

Bild__5_.jpg
65 KB

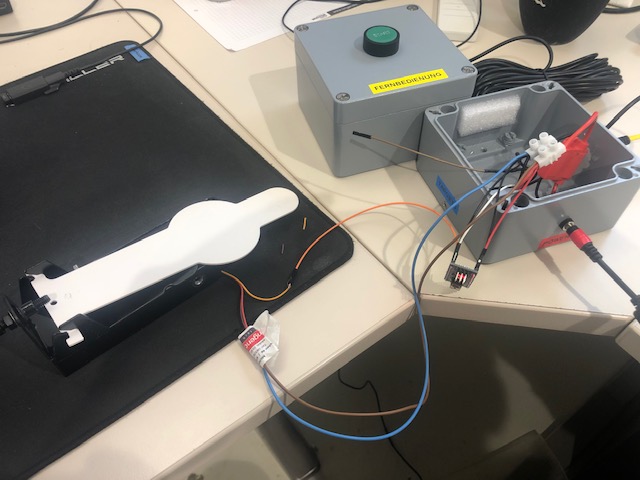

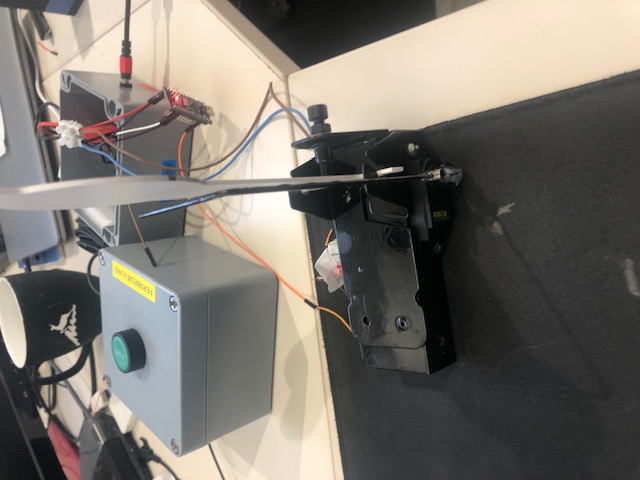
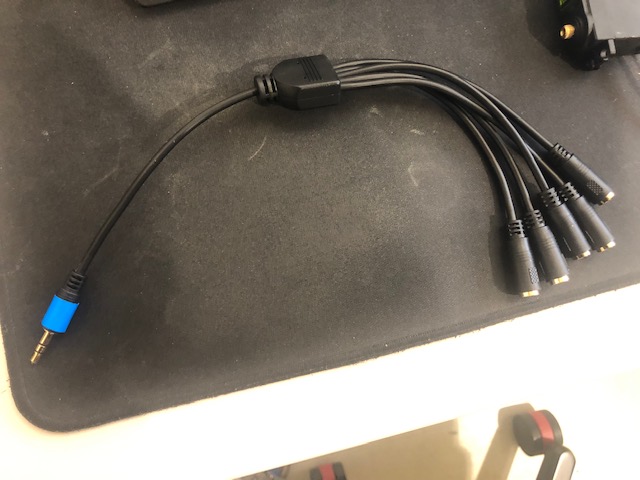
Hallo Zusammen, es lag tatsächlich an dem Arduino. Mit dem neuen klappt es wunderbar. Den alten kann ich mit dem Spannungswandler auch noch recyeln. Ich habe es mal Provisorisch zusammengebaut zum Test. (BILD 2+4) Nun läuft eigentlich alles, nur die Verbindungskabel der Servos muss ich erneuern. Da läuft zu wenig Strom durch. Die Servos laufen in Zeitlupe und haben keine Kraft. Ich habe hierfür Klinke 3,5 mm Kabel vorgesehen. Ob es an den Kabeln oder den Buchsen liegt weiß ich nicht. Gibt es da vielleicht bessere oder sind die generell zu schwach? Ich wollte diese nehmen da es dafür Y Kabel (BILD 3) mit 5 Anschlüssen gibt. So könnte ich es einfach splitten um ein zusätzliches Ziel anzustecken. Nun suche ich eine alternative. Kennt jemand die XLR Stecker? Sind die besser? Zudem habe ich auch noch 6,35mm Klinke gefunden... Da sollte wohl auch mehr Strom durchgehen. Ich wollte mir den Aufwand ersparen hier für jedes Ziel eine Separate Buchse zu installieren. Ich war schon stutzig da ich keinerlei Angaben fand wie viel Ampere die Kabel vertragen. Tja, war wohl ein Griff in die Toilette... Aliexpress kann ich im übrigen nicht empfehlen. Von den 5 Klinkekabeln mit 5 Meter länge, gehen nur 4 Stück. Eins hat bei Masse gar keinen Durchgang. Die Klinkebuchsen (BILD 1 ), die ich dort bestellt habe gingen gar nicht. Der Stecker hatte nur Kontakt zu einem Pol da der Stecker gar nicht weit genug rein ging. Echt armselig. Ich habe dann welche bei Conrad bestellt. Zu sehen an dem Servo (BILD 3)
Sven schrieb: > Ob es an den Kabeln oder den Buchsen liegt weiß ich nicht. Vermutlich beides. Die sind nicht zur Stromversorgung gedacht, sondern für analoge Audio Signale, wo nur wenige Milliampere fließen. Mir fällt dazu gerade keine ähnlich elegante Alternative ein. Ich mache so etwas in der Regel mit Schraubklemmen. Klinkenstecker (auch in größer) würde ich nicht nehmen, weil sie beim Einstecken temporär einen Kurzschluss verursachen. Damit versaut man sich schnell die Kontakte.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.