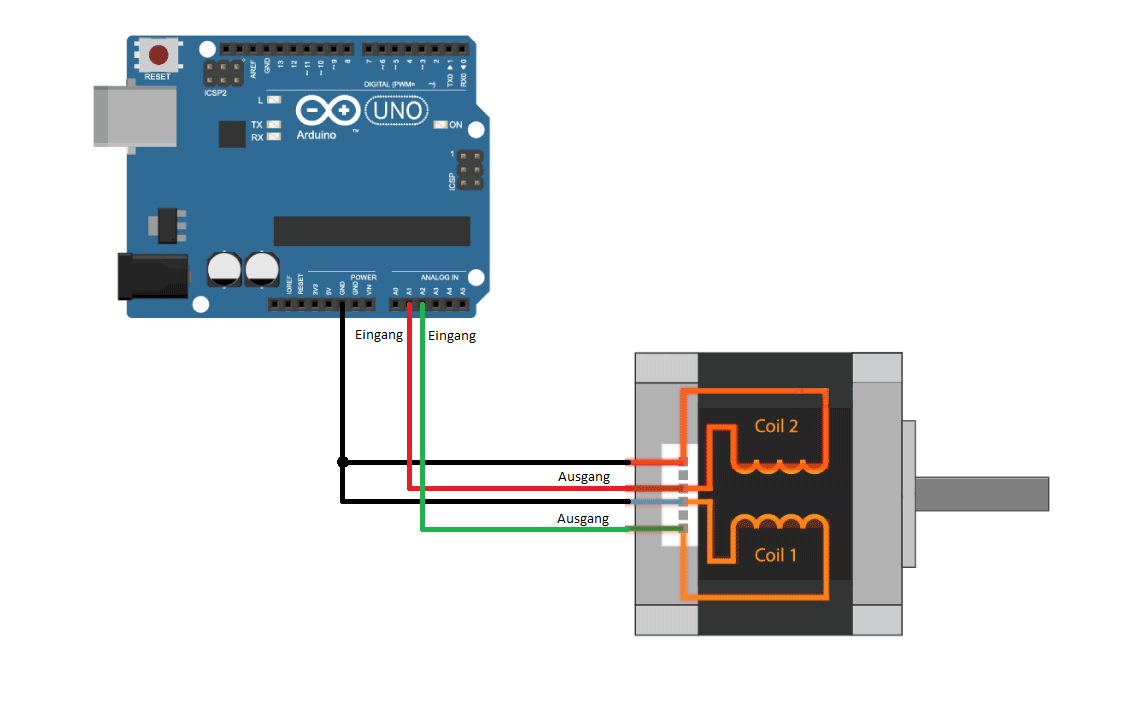
Hallo, ich versuche die Spannungen an den Ausgängen der Spulen des Nema17 Schrittmotors mit dem Arduino zu messen(s. Bild). Das heißt, wenn ich den Motor per Hand drehe, dann entsteht Spannung an den Spulen und die gibt Auskunft über die Geschwindigkeit der Drehung und über die Richtung(im Uhrzeigersinn / gegen Uhrzeigersinn). Das funktioniert auch einigermaßen, aber es gibt zwei Probleme: -> Die Spannung kann auch mehr als 5V werden, daher müsste man die begrenzen, die Frage ist nur wie? -> Wenn ich den Motor an den Arduino anschließe muss man mehr Kraft aufwenden um den zu drehen. Mit offenen Kontakten geht es viel leichter. Woran liegt das?
Angehängte Dateien:
-

arduino_nema17.png
24 KB
Eugen T. schrieb: > ich versuche die Spannungen an den Ausgängen der Spulen des Nema17 > Schrittmotors mit dem Arduino zu messen(s. Bild). Das heißt, wenn ich > den Motor per Hand drehe, dann entsteht Spannung an den Spulen und die > gibt Auskunft über die Geschwindigkeit der Drehung und über die > Richtung(im Uhrzeigersinn / gegen Uhrzeigersinn). Das funktioniert auch > einigermaßen, aber es gibt zwei Probleme: > > -> Die Spannung kann auch mehr als 5V werden, daher müsste man die > begrenzen, die Frage ist nur wie? Der Motor erzeugt auch negative Spannungen, bezogen auf GND vom Arduino. Damit killst Du das Board. Dein Vorhaben macht aus meiner Sicht keinen Sinn. Was genau ist denn Dein Plan?
Es hat mich auch gewundert, dass der Arduino Uno das mitmacht, aber da brennt nichts durch und die Spannungen sind immer positive, auch wenn man plus und minus vertauscht. Ich benutze den kleinen Nema17 als "rotary encoder", und der ist für mein Vorhaben perfekt, weil man damit die Drehung sehr genau abbilden kann und man spürt beim drehen die einzelne Schritte.
Eugen T. schrieb: > Es hat mich auch gewundert, dass der Arduino Uno das mitmacht, > aber da brennt nichts durch und die Spannungen sind immer positive, > auch wenn man plus und minus vertauscht. Wir können weiter diskutieren wenn Du das Thema ernst nimmst.
:
Bearbeitet durch User
Du musst die Idee nicht mögen. Es gibt zwei Fragen im ersten Post und entweder hast du die Antworten oder ich kann deine Kommentare nicht gebrauchen.
Eugen T. schrieb: > Du musst die Idee nicht mögen. Es gibt zwei Fragen im ersten Post > und > entweder hast du die Antworten oder ich kann deine Kommentare nicht > gebrauchen. Die Antwort ist dass Du den Arduino killst. Sorry, frisch angemeldet, es ist mitten in der Nacht..hat immer etwas von Trollerei aufgrund von Langeweile. Viel Spaß noch bei deinem Vorhaben. Ich hole mir jetzt Cola und Popcorn und habe Spaß an dem was nun noch folgt🤡
Hey ich antworte dir gern wenn du vom Azubi Antworten willst Eugen T. schrieb: > -> Wenn ich den Motor an den Arduino anschließe muss man mehr Kraft > aufwenden um den zu drehen. Mit offenen Kontakten geht es viel > leichter. Woran liegt das? Über die Schutzdioden des Port fliesst Strom würde ich annehmen? Habe gerade keine Arduino Schaltbild vor mir. Hier guck dir die Dioden im Atmega an https://www-user.tu-chemnitz.de/~heha/hsn/chm/ATmegaX8.chm/14.htm Deshalb flisst Strom und es entsteht die Gegenkraft https://studyflix.de/elektrotechnik/lenzsche-regel-1811
Eugen T. schrieb: > Es hat mich auch gewundert, dass der Arduino Uno das mitmacht, aber da > brennt nichts durch Dann hast du Glück gehabt, dass die eingebrachte Energie nicht groß genug gewesen ist. Außerhalb der Spezifikationen bist du trotzdem - und in diesem Bereich darf der Controller kaputt gehen oder zumindest nicht ordnungsgemäß funktionieren. Eugen T. schrieb: > -> Die Spannung kann auch mehr als 5V werden, daher müsste man die > begrenzen, die Frage ist nur wie? Der Atmega328 hat Schutzdioden eingebaut (siehe Datenblatt). Mit einem Vorwiderstand lässt sich der Strom entsprechend begrenzen. Die Wirkung der Schutzdioden merkst du übrigens bereits - der Motor dreht sich per Hand schwerer, wenn er angeschlossen ist. Das liegt daran, dass über die Dioden ein Strom fließt, der für eine entgegengesetzte Kraft sorgt. Stichwort: Lenz'sche Regel. Warum vergewaltigst du einen Motor und nimmst nicht einfach einen konventionellen Drehgeber, wenn es dir nur um Drehrichtung bzw. Geschwindigkeit geht?
Azubibubi schrieb: > Über die Schutzdioden des Port fliesst Strom würde ich annehmen? Habe > gerade keine Arduino Schaltbild vor mir. Hier guck dir die Dioden im > Atmega an > > https://www-user.tu-chemnitz.de/~heha/hsn/chm/ATmegaX8.chm/14.htm > > Deshalb flisst Strom und es entsteht die Gegenkraft > > https://studyflix.de/elektrotechnik/lenzsche-regel-1811 Vielen Dank. Ich schau mir das an.
Angehängte Dateien:
-

encoder.png
37 KB -

encoder.png
37 KB
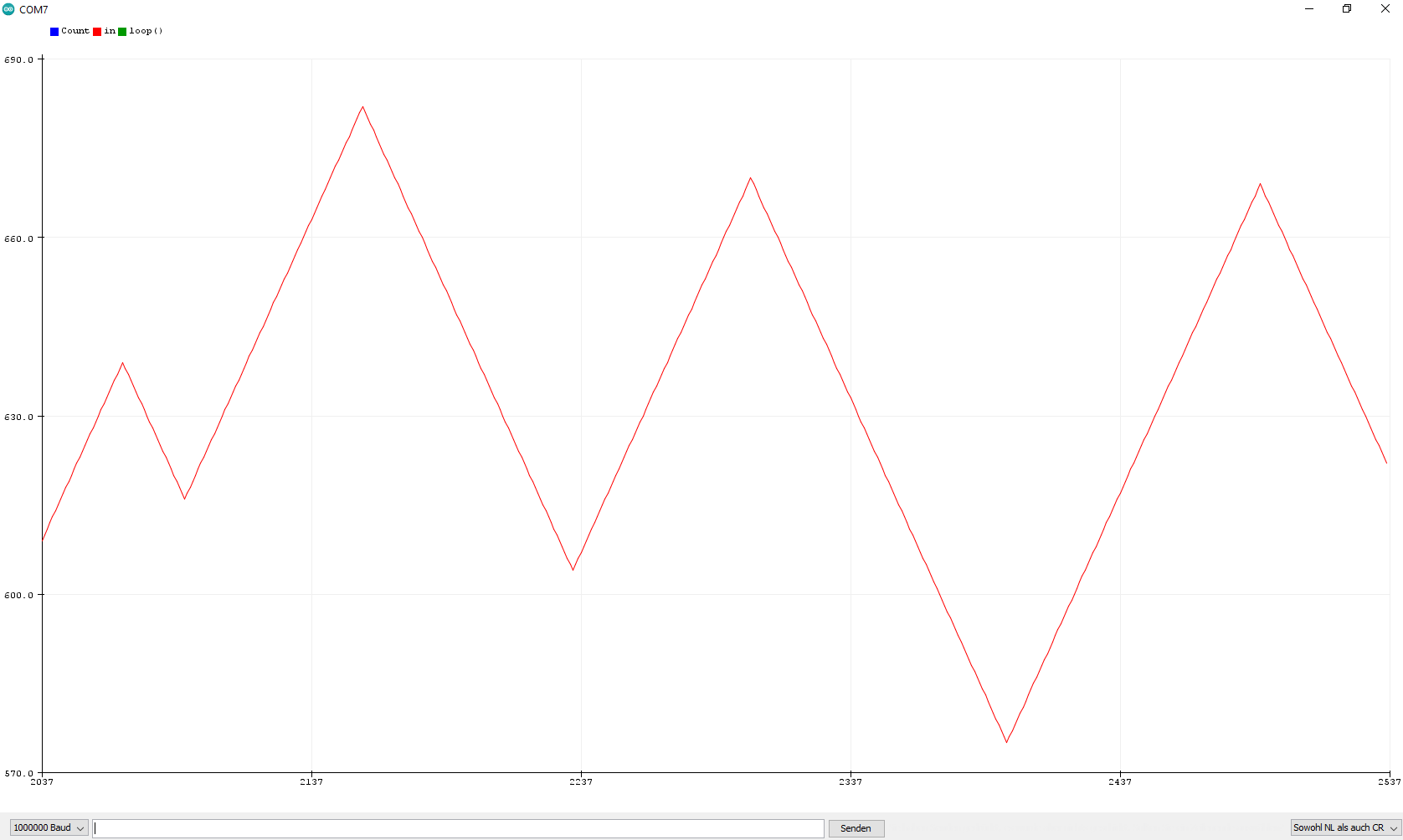
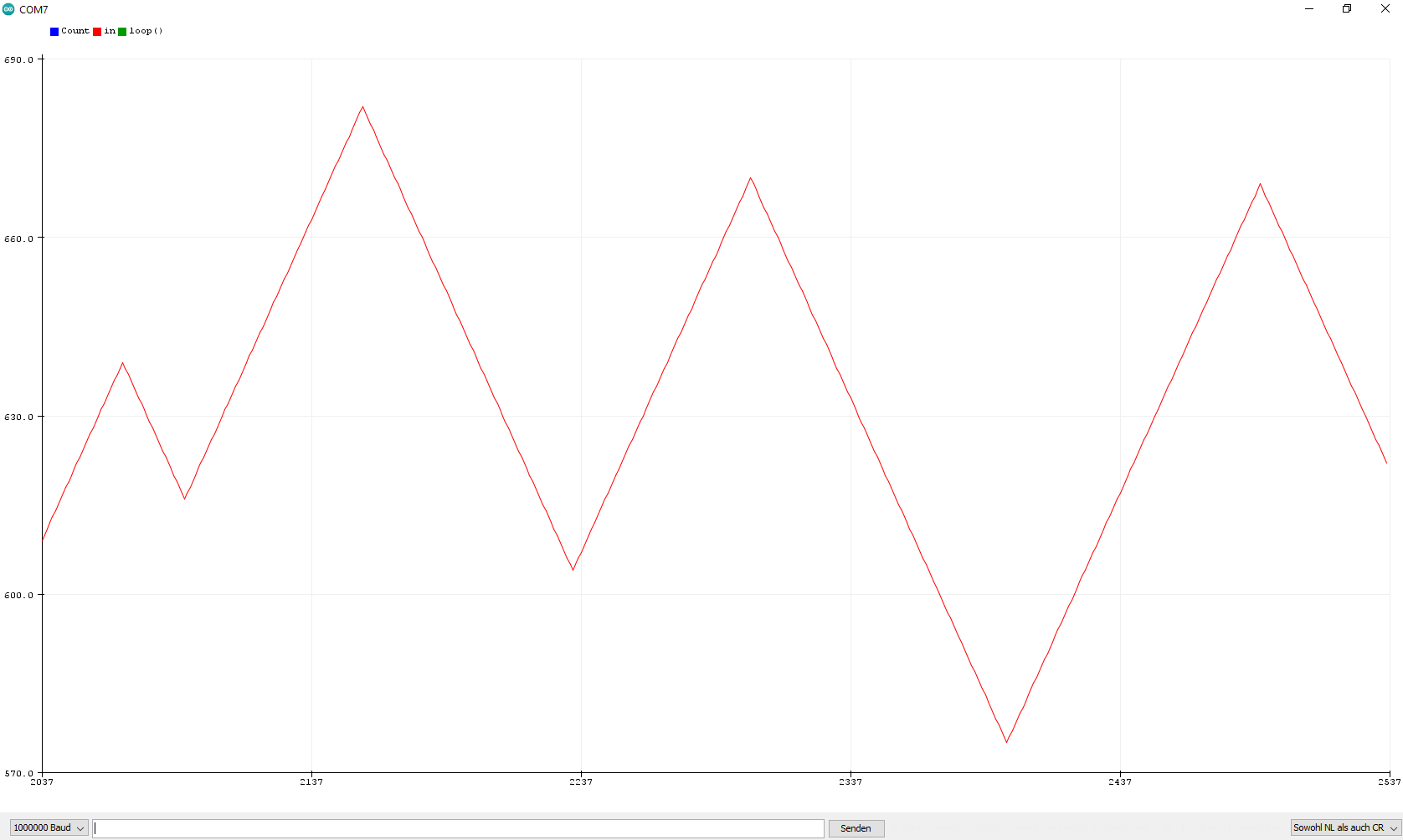
Jörg R. schrieb: > Die Antwort ist dass Du den Arduino killst. Tja, damit liegst du leider falsch, der Arduino ist lebendiger den je und liefert zuverlässig die Werte(s. Bild)
Angehängte Dateien:
-

arm.png
58 KB
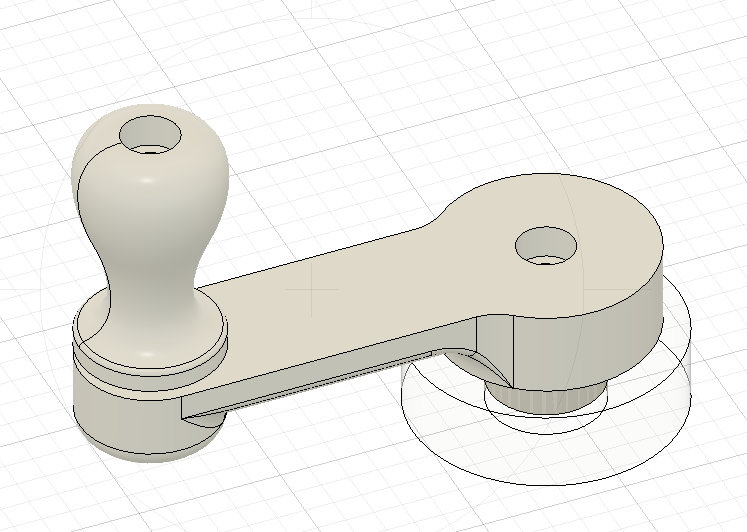
Stefan S. schrieb: > Warum vergewaltigst du einen Motor und nimmst nicht einfach einen > konventionellen Drehgeber, wenn es dir nur um Drehrichtung bzw. > Geschwindigkeit geht? Drei Gründe: ich hatte einen rumliegen möchte kein Geld ausgeben beim drehen leistet der Motor Widerstand und lässt die Schritte spüren, was für so ein Drehhebel(s. Bild) wichtig wäre.
Eugen T. schrieb: > Jörg R. schrieb: >> Die Antwort ist dass Du den Arduino killst. > > Tja, damit liegst du leider falsch, der Arduino ist lebendiger den je > und liefert zuverlässig die Werte(s. Bild) Ich brauche mehr Popcorn🍿
Bei einem ACT 23HS542, dessen Achse ich mit der Kombizange drehe, erreiche ich einen Strom zwischen 0,2 A und 0,55 A. Die armen Schutzdioden...
Angehängte Dateien:
-

nema17_.jpg
13 KB

Andreas S. schrieb: > Bei einem ACT 23HS542, dessen Achse ich mit der Kombizange drehe, > erreiche ich einen Strom zwischen 0,2 A und 0,55 A. Die armen > Schutzdioden... Ist so einer: Spannung 3.5 Volt 16 Ncm Haltemoment NEMA 17 bipolar 42*42*20mm4-Draht 1,8 Grad Schrittwinkel (200 Schritte / U) Nennstrom 1,0 A & Widerstand 3,5 Ohm
Wenn man die Gefühle für den vergewaltigten Motor und die Zweckmäßigkeit des Vorhabens beiseite legt bleibt die Frage wie man sowas sicher betreiben kann. Wie groß muss der Vorwiderstand sein? Wohin mit der Überschüssigen Energie damit der Wiederstand beim drehen nicht zu groß wird?
Eugen T. schrieb: > Du musst die Idee nicht mögen. Es gibt zwei Fragen im ersten Post und > entweder hast du die Antworten oder ich kann deine Kommentare nicht > gebrauchen. Bei solch einem Auftritt wirst Du von mir keine konkrete Unterstützung erhalten. Eugen T. schrieb: > Ist so einer: Ist mir egal. Die Messergebnisse waren nicht für Dich bestimmt, sondern eher für die anderen Diskutanten. Eugen T. schrieb: > Wenn man die Gefühle für den vergewaltigten Motor und die Zweckmäßigkeit > des Vorhabens beiseite legt Das ist Merkbefreiung allererster Sahne. Geh woanders spielen. > Wiederstand https://www.duden.de/suchen/dudenonline/wiederstand
:
Bearbeitet durch User
Eugen T. schrieb: > -> Die Spannung kann auch mehr als 5V werden, daher müsste man die > begrenzen, die Frage ist nur wie? > -> Wenn ich den Motor an den Arduino anschließe muss man mehr Kraft > aufwenden um den zu drehen. Mit offenen Kontakten geht es viel > leichter. Woran liegt das? Direkte Antwort auf deine Fragen: 1. Damit du den Eingang des Arduino nicht überlastest solltest du mindestens den Strom auf Werte unter 1mA begrenzen. Die internen Eingangsschutzdioden sorgen dann für den Rest, solange die Stromaufnahme von deinem Arduino ausreichend groß ist. Andernfalls wird seine Betriebsspannung angehoben, was diese schnell über den spezifierten Maximalwert ansteigen ließe. 2. Am Quasi-Kurzschluss der unteren Halbwelle über die untere Eingangsschutzdiode. Genauso könntest du die Motorwicklungen jeweils direkt kurzschließen.
Zur Problematik wurde ja bereits alles gesagt. Was sich der TO davon zu Herzen nimmt, bleibt ihm überlassen. Neu ist die Idee aber keinesfalls: Beitrag "SCHRITTMOTOR ALS ROTARY ENCODER" - und es gibt noch mehr Fundstellen.
Eugen T. schrieb: > Du musst die Idee nicht mögen. Auch wenn du das Glück hast, dass der AVR noch nicht spürbar beschädigt ist: es ist trotzdem eine blöde Idee, mangels Grundlagenwissen die "Absolute Maximum Ratings" im Datenblatt des µC mit jedem Drehen des Schrittmotors zu verletzen. Das ist, wie wenn du mit ohne auf den Verkehr zu achten eine Straße überquerst: je nach Tageszeit und Reaktionsvermögen der beteiligten Autofahrer kann das mehr oder weniger oft gut gehen. Trotzdem ist es eine blöde Idee. Eugen T. schrieb: > -> Die Spannung kann auch mehr als 5V werden, daher müsste man die > begrenzen, die Frage ist nur wie? Du musst nicht die Spannung des Schrittmotrs begrenzen, sonden lediglich die Spannung, die der µC sieht. Also: Serienwiderstand und Klemmdioden bzw. Z-Diode. > -> Wenn ich den Motor an den Arduino anschließe muss man mehr Kraft > aufwenden um den zu drehen. Mit offenen Kontakten geht es viel > leichter. Woran liegt das? Am Kurzschluss, den die Schutzdiode des AVR gegen GND für negative Spannungen erzeugt. Schließ zum Test einfach mal eine Diode an die Anschlüsse des Schrittmotrs an. Oder schließ die Anschlüsse des Schrittmotrs kurz und dreh dann. Du siehst: gleicher Effekt. Eugen T. schrieb: > Wie groß muss der Vorwiderstand sein? Nimm 10k. > Wohin mit der Überschüssigen > Energie damit der Wiederstand beim drehen nicht zu groß wird? Lass die im Motor. Sobald du sie extern verheizt, musst du sie auch aufbringen. Und noch eins: nimm einfach mal Google, gib dort deinen Plan ein und versuche zu verstehen, was Andere da so gemacht haben. * https://www.google.com/search?q="schrittmotor+als+drehgeber";
:
Bearbeitet durch Moderator
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.