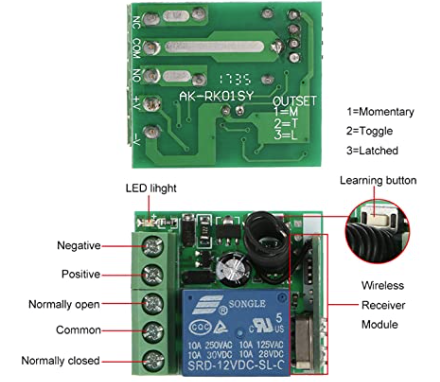
Hallo zusammen, dies ist mein erster Beitrag in diesem Forum. Ich hoffe ihr könnt mir helfen. Ich plane eine kleine Hebevorrichtung (15cmx10cm Plattform), auf der ein x-box Kinectsensor befestigt ist und bei Bedarf von der Decke ca. 15-20 cm herabfährt, bzw. wieder hochfährt. Im Anhang habe ich mal den 12 V Motor und die 12 V Steuerung gepostet. Die 12 V Steuerung ist per FB über 433 Mhz in 3 verschiedenen Modi ansteuerbar (Momentary, Toggle u. Latched). Die Idee ist den Schalt-String (rauf/runter bzw. eher rechts/links-lauf) abzufangen und per unix-script entsprechend zu steuern. Mit anderen Geräten (Funksteckdosen, Vorhangsteuerung) ist das bereits geglückt und funktioniert. Die aktuelle Geschwindikeit des Motors ist zwar etwas flott, würde aber meines Erachtens aber noch für mein Vorhaben passen, so dass ich nicht extra noch die Geschwindigkeit regeln müsste. Die mechanische Konzeption ist noch nicht fertig und muss noch konzeptioniert werden, ich denke da an eine Führungsmutter sowie Führungsschienen. Meine Frage ist, wie verdrahte ich die im Anhang abgebildete Steuerung mit dem Motor, so dass ich entsprechend links oder rechts fahre. Ist das eventuell die falsche Steuerung für mein Vorhaben? Ich hoffe meine Angaben reichen aus. Für euere Unterstützung wäre ich euch dankbar! Viele Grüße Robbi72
Angehängte Dateien:
-

12VGetriebemotor.PNG
22 KB -

Steuerung.PNG
160 KB
Athanasios schrieb: > das eventuell die falsche Steuerung für mein Vorhaben Zumindest nicht klug gewählt. Warum kaufen Leute erst und fragen dann. Deine Steuerung müsste den Motor umpolen. Zudem soll er an den Endstellungen wohl stehen bleiben. Wie erfasst du die Endposition ? Wenn an jedem Ende ein Taster ist, der beim Erreichen durch den Schlitten ABgeschaltet wird, also öffnet, und stark genug ist den Motorstrom zu tragen, müsstest du nur umpolem. Das geht mit deinem Relaus mit 1x um nur wenn du eine bipolare Spannungsquelle mit +12V, Masse(GND, 0V) und -12V hättest. Unwahrscheinlich. Statt so ein (weiteres) Netzteil zu kaufen, könnte man das Problem mit einem 12V Relais mit 2 x um Kontakten lösen, das von deinem Relais auf dem Modul gesteuert wird, also 2 Relais hintereinander, doppelt gemoppelt, aber was will man machen wenn du das Falsche kaufst. Schaltung mit Relais 2x um und 2 Endschaltern:
1 | __ __ |
2 | /o--o o---+---+ + --+--o o---o |
3 | + --o/ | | | /o--+ |
4 | : o--+ | (M) | +--o/: | |
5 | : | | | oder | | : (M) |
6 | :/o--+------(---+ - --(------+--o : | |
7 | - --o/ __ | | __ /o--+ |
8 | o--o o---+ +--o o---o/ |
Andere Schaltungsweisen (mit Dioden) in https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.25 Entweder du verdrahtest es so, dass beide Relais zur gleichen Zeit von Spulenstrom durchflossen werden und anziehen, z.B. in Stellung 'runter' doppelten Stom ziehen und in Richtung 'rauf' keinen Strom brauchen. Oder du verdrahtest es so, dass das Relais 2 x um von dem Relais 1 x um über den normally closed Kontakt bestromt wird, dann ist ENTWEDER das eine ODER das andere Relais aktiv und braucht Strom, aber nie keines. Wegen des zusätzlichen Stromverbrauchs im Relais auch wenn der Motor nicht mehr läuft weil er schon längst am Ende angekommen ist, ist dein Modul eher doof. Und scheinbar nutzt du Funk obwohl es eigentlich von einem PC aus gesteuert wird, und musst saher den PC extra einen Funksender verpassen, auch eher doof.
Angehängte Dateien:
-

Steuerung2.PNG
83 KB
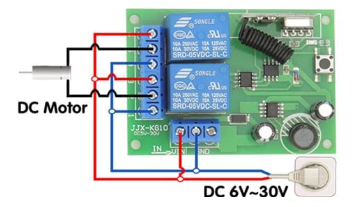
Hallo Michael, danke für Deine Rückmeldung! In der Tat war der Ideenwille schneller als das Hirn, als ich das Teil bestellt habe. Es soll eigentlich einfach statt kompliziert werden, ich kann/werde das Modul zurückgeben, daran soll es nicht liegen. Für die Endpunkte habe ich mir gedacht diese softwaremäßig zu steuern, also die Zeit zu stoppen, die eine Laufrichtung braucht (z.B. Knopf A auf FB für hoch + Stoppbefehl) und dann den entsprechenden unix-Befehl (python) mit der gemessenen Laufzeit auszuführen. Habe das bereits an anderer Stelle mit anderen Aktionen im Einsatz, klar nicht im Sinne dieses Forums und nichts Hardwaremäßiges, aber es könnte funktionieren. Dazu muss ich sagen, dass ich sämtliche Funkansteuerungen über einen 24/7 Raspberry durchführe, ist also immer im Dauerbetrieb. Das einzige wo ich Dir absolut Recht gebe, wäre der Motor, der immer unter Strom wäre. Die Funkbefehle werden über einen Broadlink RM4 Pro S von der FB ausgelesen und dann in unix-python ausgewertet/weiterverarbeitet. Diese werden in Sequenzen und Abhängigkeiten in mein Smarthomesystem (FHEM) automatisiert bzw. über eine Schaltfläche gesteuert/ausgeführt. Ganz praktische Sache wenn man nicht unbedingt der Schaltprofi-Elektroniker ist. Ich vermute mal, dass das Exemplar im Anhang eher die richtige Steuerung für mein Vorhaben wäre? Gibt es eventuell noch eine einfachere Möglichkeit, wo z. B. die Endpunkte schon durch die Steuerung gesteuert werden und eventuell noch leicht an- und auslaufen (um Ruckbewegung zu vermeiden), vermutlich wird das wohl etwas komplizierter? VG robbi72
Athanasios schrieb: > Für die Endpunkte habe ich mir gedacht diese softwaremäßig zu steuern Was passiert denn, wenn die Mechanik einen Endpunkt erreicht, aber der Funkbefehl nicht durchkommt ? Und Python als echzeitfähig anzusehen ist gewagt. Obwohl das Modul eher taugt (es kann den Motor auch ausschalten), bremst es hart. Du könntest in Reihe mit dem Motor einen Leistungs-Festwiderstand schalten (bei 12V/1A Nennwert Motor einen 12 Ohm, 17W Widerstand) und an die Relais die DOPPELTE Spannung also 24V anlegen, dann fährt der Motor sanfter an und bremst sanfter. Aber die Hälfte ist Verlust und der Motor läuft auf der Strecke belastungsabhängiger. Ohne Endschalter nutzt man üblicherweise Schrittmotore um definierte Strcken zu durchfahren, die können Beschleunigungs- und Bremsrampen und definierte Drehzahl, aber da muss eine ganz andere Ansteuerung her.
Athanasios schrieb: > Für die Endpunkte habe ich mir gedacht diese softwaremäßig zu steuern, > also die Zeit zu stoppen, die eine Laufrichtung braucht Sowas macht man nicht. Entweder Endlagenschalter oder Überstromerkennung am Motor. Beitrag "Re: 12V Motor mir automatischer Umschaltung z.B. mit Lichtschranke"
Angehängte Dateien:
-

Linearantrieb.PNG
98 KB

{kind=link}
Hallo zusammen, danke für eure Rückmeldungen und die wertvollen Hinweise! Das mit den Endlagenschaltern hatte ich tatsächlich nicht so kritisch bedacht. Das ist tatsächlich der ausschlaggebendste Punkt von der unüberlegten Idee mit der Softwaresteuerung für die Endlagen abzurücken! Nachdem ich bei einer Trockenübung den Motor fast gehimmelt habe, habe ich das Thema zu den Akten gelegt. Ich habe mich nun für die bereits erwähnte Steuerung2 (s. Abb.) entschieden, weg vom Motor und hin zur Steuerung mit einem Linearantrieb (s. Abb.). Der hat zumindest die Endlagen und ist vermutlich einfacher zu handhaben, auch wenn das kraftmäßig völlig überdimensioniert ist. Damit sollte mein Projekt realisierbar sein. Vielen Dank noch mal!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.