Moin, ich möchte mich mit BLDC Motoren versuchen und eine kleine steuerung dafür bauen. Noch frage ich mich aber was für mich realisierbar ist...eine Schaltung selber bauen und versuchen das mit meinen uC hinzubekommen..in der Theorie sind es ja nicht allzuviele Bausteine, die große Herrausvorderung wird dann die Ansteuerung mit dem uC schätze ich. Habe bis jetzt noch nicht allzuviel Informationen hierzu gefunden, außer mal ein Beitrag hier auf der Plattform. Was ich aber gefunden habe ist der Chip A89306. Hat da jemand mit Erfahrung mit ? Damit könnte ich mir evtl. viel Arbeit ersparen und mit 400Hz auf 24.000rpm kommen wenn ich das richtig verstehe ? Ansteuerung per I2C wäre ja einfach. Erstmal war der Gedanke ohne Hallsensoren zu arbeiten. Ansich misst man die Spannungen der Phasen um die Position des Rotors zu ermitteln, dies macht der IC dann ja von alleine und muss mir darum keine Gedanken machen ? Ganz am Ende vom Lied möchte ich mit dem Motor etwas mithilfe eines kleinen Getriebes positionieren. Aber das steht noch in ferner Zukunft (Schrittmotor wäre möglich, hab aber Lust was mit BLDC zu machen). Alles sehr schwammig, es steht noch keine Plan. Mich interessiert ob der IC zu empfehlen ist :)
Franz schrieb: > A89306. Hat da jemand mit Erfahrung mit ? Nein, aber die Beschreibung gelesen. Da steht nur was von Ventilatoren, das Ding taugt nur wenn der Motor ohne Last anlaufen kann, weil es sensorless ja erst per Kick eine Mindestdrehzahl für BackEMF erreichen können muss. Insgesamt ist sensorless schwieriger, mit Sensoren reichen ja schon simple Transistoren um BLDC in Bewegung zu bekommen. Zudem: A89306 Schwer zu beschaffen, schwer zu löten, braucht externe MOSFETs und wenn es mit ihm nicht so geht wie gehofft, dann kannst du auch nix dran ändern sondern brauchst einen anderen. Hauptfeature des Chip: Der Motor läuft geräuschlos, pfeift nicht wie eine Eisenbahn, und er lässt sich eben mit Bedienknöpfen steuern. ohne uC.
Ich hatte mal ein Modellauto mit BLDC ohne Sensor. Bei dem Ding fiel mir besonders auf, dass die Regelung bei niedrigen Drehzahlen oft versagte. Es konnte auch nicht so sanft anfahren, wie andere Autos mit DC Motor oder BLDC+Sensor.
Franz schrieb: > Habe bis jetzt noch nicht allzuviel Informationen hierzu gefunden, außer > mal ein Beitrag hier auf der Plattform. Hol dir mal die AN8010 (alte AVR447) von Microchip. Da wird die Sinuansteuerung eines BLDC mit Sensoren behandelt, das Prinzip erklärt und ein Programm für den Mega48/88/168 vorgestellt. AN8012 beschreibt die Ansteuerung ohne Sensoren.
Naja, wenn Du etwas lernen / probieren willst ist sicher der µC der richtige Weg. Wenn es einfach nur funktionieren soll dann einen fertigen Controller z.B. aus dem Modellbaubereich, die gibt es wirklich günstig. Einen Chip zu nehmen der Dir quasi alles abnimmt ist das gleiche als wenn Du einen fertigen Controller nimmst. Es gab auch mal OpenSource BLDC Projekte, bin aber nicht sicher was daraus geworden ist, scheinen mir größtenteil verwaist zu sein.
Anlauf unter Last und niedrige Drehzahlen wird mit sensorlosen BLDC nichts. Positionierung schon gar nicht, da brauchst Du Sensoren. Ist auch viel einfacher in Griff zu bekommen als sensorlos. Toshiba hatte mal leicht zu verwendendente IC für BLDCs, zB TB6574 und weitere. Sind leider eingestellt worden. Hab glaub ich irgendwo noch ein paar liegen. In älteren China-Controllern für E-Fahrräder ist oft ein MC33035 drin. den gab es für Grobmotoriker sogar im DIL Gehäuse. Einen Treiber für die Motorbrücke braucht es aber immer. Das geht meist schon mit dem IR2101 recht einfach zu machen, recht gutmütig das Teil. Gab dann auch noch von Melexis einige Teile mit Treiber drin, zB MLX90401. Doch damit hab ich nicht so gute Erfahrungen gemacht.
Dann hat sich meine Befürchtung bewahrheitet, dass sensorless für mich dann leider wegfällt...dann muss ich wohl die Hallsensoren benutzen. Da bin ich aber erstmalbei 0. Außer es gibt wie den MC33035 fertige Bausteine, was ich tendeziell bevorzugen würde..
Alle von mir genannten IC können mit Hallsensoren arbeiten. Gibt sicher noch andere, seit ich das mit µC mache hab ich mich nicht weiter darum gekümmert. Ob es da welche mit i²c Ansteuerung gibt weis ich nicht. Allegro könnte was haben, doch haben die meist QFN Gehäuse. Glaube TI hat auch was.
Steffen W. schrieb: > In älteren China-Controllern für E-Fahrräder ist oft ein > MC33035 drin. https://datasheet.lcsc.com/lcsc/2109231030_XINLUDA-XL33035_C609781.pdf
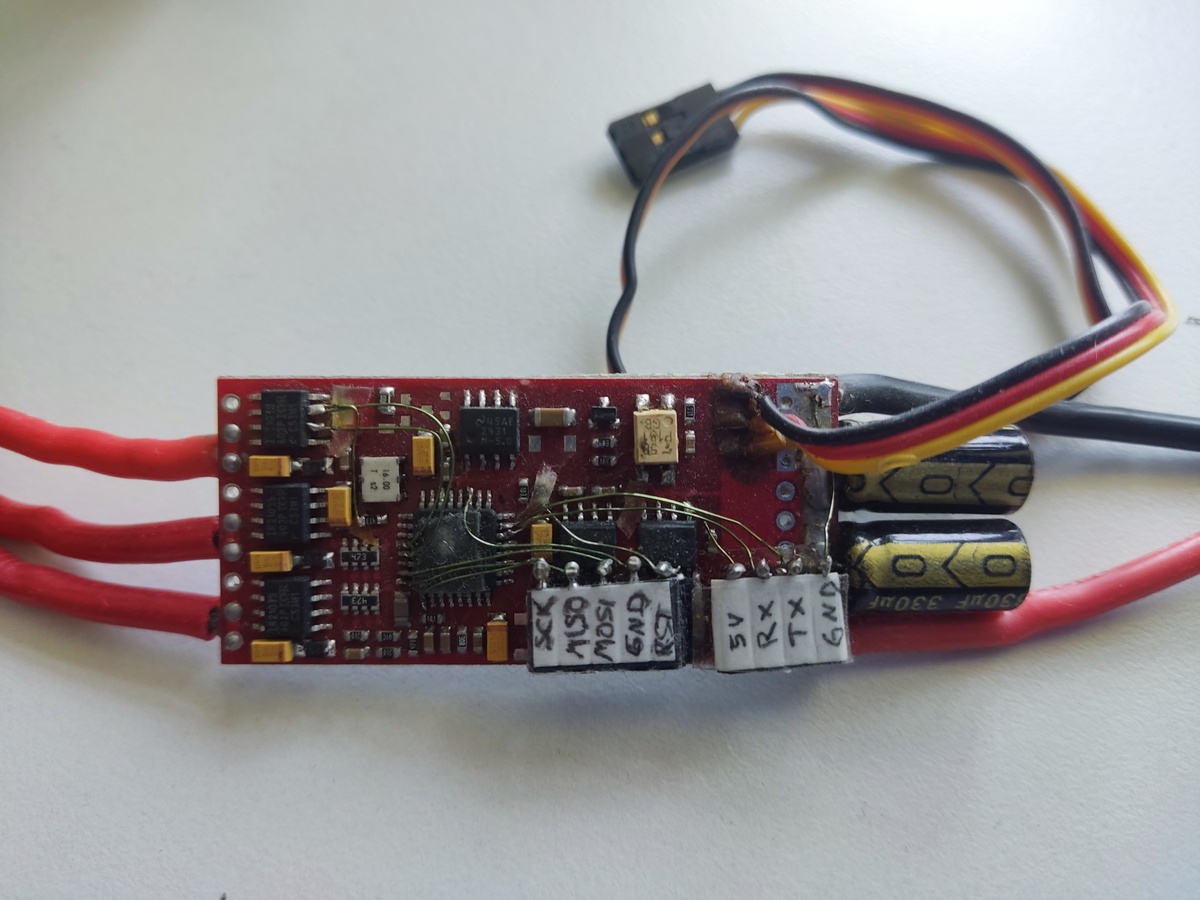
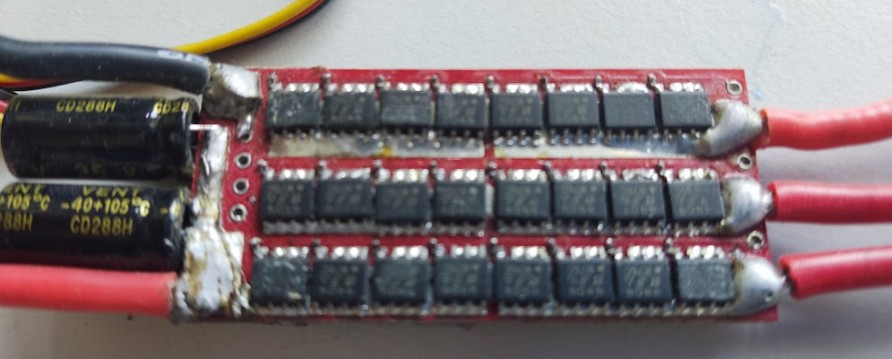
Markus M. schrieb: > Es gab auch mal OpenSource BLDC Projekte, bin aber nicht sicher was > daraus geworden ist, Die sind dann mit irgendeinem Softwarestand auf so China-BLDC-Platinchen gelandet, die man für wenig Geld bei Ali&Co bekommt. Mit ein bisschen Fädeldraht kriegt man eine ISP-Schnittstelle usw. nachgerüstet, und kann sich dann mit der Software spielen.
Es eine Atmel/Microchip Application Note mit Code für einen BLDC; ok, den Leistungsteil muss man dann selber drankleben. (sehe grade, AN8010 (alte AVR447) ist weiter oben schon gennant)
Es gibt so etwas wie das China Standard Design für bldc und atmega. Und die SW heißt SimonK.
Wilhelm M. schrieb: > Es gibt so etwas wie das China Standard Design für bldc und > atmega. Und die SW heißt SimonK. Das taugt doch nur für Ventilatoren (am Kopter) weil ohne Hallsensoren.
Ich werde mal mir eine MOSFET Brücke fürn BLDC bauen und dann alles mit meinen PIC und den Hallsensoren machen. Der DRV8313 spart mir evtl. Treiber + Mosfet und verbindet dies in einem IC. Fertige ICs die BLDC Motoren mitt Hallsensoren antrieben wirken für mich erstmal komplizierter als Brücke + uC. Wenn man sich die Abläufe eines BLDC anguckt mit den Hallsensoren sollte ich dies relativ einfach zum drehen bekommen.
Mit Sensoren ist der ganze Spaß einfach. Schlupflose Antriebe brauchen Sensoren. Man kann auch Sensoren an typischen bldc nachrüsten. Kannst auch Gimbal Motoren nehmen, die haben einen Axial Sensor.
Franz schrieb: > Wenn man sich die Abläufe eines BLDC anguckt mit den Hallsensoren sollte > ich dies relativ einfach zum drehen bekommen. Wenn die Hallsensoren richtig von Magneten überstrichen werden reicht eine Halbbrücke pro Anschluss und der Motor dreht wie ein BrüstenDCMotor.
Michael B. schrieb: > Wenn die Hallsensoren richtig von Magneten überstrichen werden reicht > eine Halbbrücke pro Anschluss und der Motor dreht wie ein > BrüstenDCMotor. Ja. Das reicht um ihn drehen zu lassen, so wie der Chip für die Lüfter. Franz schrieb: > Ganz am Ende vom Lied möchte ich mit dem Motor etwas mithilfe eines > kleinen Getriebes positionieren. Zum Positionieren willst du Sensoren. Wenn es genau sein soll den Sensor auch gleich am Ende des Getriebes platzieren. Die Rotorposition kann man sich mit der Getriebeübersetzung ausrechnen. Ob du jetzt einen Absolutwert Sensor brauchst oder ob ein Inkrementeller reicht, kommt auf den Aufbau/Anwendung drauf an. Wirst du unter Last anlaufen müssen? -> Absolutwertgeber Oder kannst du zu beginn die Maschine ohne Belastung initialisieren? -> Inkrementell reicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.