Hallo zusammen Ich hätte mal eine grundlegende Frage. Angenommen man möchte einen DC Motor regeln, von dem man die Parameter etc. nicht kennt und nur wenige Daten hat, so wie es der Fall ist, wenn man einen aus China ordert. Zb https://www.amazon.de/DC-Motoren-Elektro-B%C3%BCrstenmotor-Halterung-Elektromoto/dp/B09W2K2H7Q Wie regelt man so einen Motor heutzutage überhaupt? Macht man das in der Praxis so wie man es in der Schule lernt mit der Motorkonstante kM, Reibkonstante kR etc. Macht man es überhaupt noch so? Oder geht man da anders vor? Man weiss ja im Prinzip nur, dass der DC Motor ein PT-1 Verhalten hat und daher die Regelstrecke mit 1/(1+sT) angenähert werden kann. Da man die Parameter der Maschine nicht kennt, weiss man aber auch nichts über die Grösse der Zeitkonstante. Es gibt etliche Youtube Videos, die mit noname Motoren eine Regelung gebaut haben und man für diese Art von Motoren auch keine wirklich brauchbaren Daten erhält. Wie macht man es also in der Praxis in so einem Fall? Sprungfunktion auf den Motor geben, Verhalten messen und die Regelstrecke nach Rezept identifizieren und dann den Regler entsprechend auslegen?
:
Verschoben durch Moderator
1. Auf was willst du regeln? Drehmoment, Drehzahl, Position, Motorstrom? 2. Das System das du regeln willst ist nicht der Motor alleine, das wäre völlig unnütz, sondern den Motor und das angetriebene Gerät. Dieses Gesamtsystem bestimmt welche Regelstrecke du im Endeffekt hast und welche Parameter sich ergeben. Ein Ventilator verhält sich völlig anders als ein Kompressor. Ein Aufzug musst völlig anders regeln als ein Klimakompressor. Und zu guter Letzt: Solche generelle Rundumschlagfragen bringen meist gar nichts. Also was ist dein eigentliches Problem?
:
Bearbeitet durch User
Markus K. schrieb: > Wie macht man es also in der Praxis in so einem Fall? Regelparamter empirisch ermitteln. > Sprungfunktion auf den Motor geben, Verhalten messen und die > Regelstrecke nach Rezept identifizieren und dann den Regler entsprechend > auslegen? BINGO!
Udo S. schrieb: > 1. Auf was willst du regeln? > Drehmoment, Drehzahl, Position, Motorstrom? Was hat das mit der Frage zu tun? Die Frage ist allgemein gestellt. Wenn die Regelstrecke nicht bekannt ist, kommt es auch nicht drauf an, ob ich eine Drehmoment oder Geschwindigkeitsregelung möchte. > 2. Das System das du regeln willst ist nicht der Motor alleine, das wäre > völlig unnütz, sondern den Motor und das angetriebene Gerät. > Dieses Gesamtsystem bestimmt welche Regelstrecke du im Endeffekt hast > und welche Parameter sich ergeben. > Ein Ventilator verhält sich völlig anders als ein Kompressor. > Ein Aufzug musst völlig anders regeln als ein Klimakompressor. > > Und zu guter Letzt: > Solche generelle Rundumschlagfragen bringen meist gar nichts. > Also was ist dein eigentliches Problem? Mein Problem ist, dass ich einfach verstehen möchte, was der Professor in dem Video gemacht hat. https://www.google.com/search?client=ms-android-huawei-rev1&sxsrf=APwXEdeUmJ7s0fWmSriDGgbEkvzjKoFFlg:1687415411221&q=kettcar+regelung&tbm=vid&sa=X&ved=2ahUKEwjmirKhoNb_AhXvVvEDHUJ7DakQ0pQJegQICxAB&biw=360&bih=657&dpr=3#fpstate=ive&vld=cid:756b563f,vid:FfNwM9oD9QY Falk B. schrieb: > Markus K. schrieb: >> Wie macht man es also in der Praxis in so einem Fall? > > Regelparamter empirisch ermitteln. > >> Sprungfunktion auf den Motor geben, Verhalten messen und die >> Regelstrecke nach Rezept identifizieren und dann den Regler entsprechend >> auslegen? > > BINGO! Danke dir für die prägnanten Antworten. Ich habe noch eine Frage und zwar verstehe ich die unterlagerte Stromregelung nicht. Nehmen wir an, auf der Welle greift ein Widerstandsmoment im Fall A 10Nm und Fall B 15Nm an. Es ist ein Sollwert von 12Nm vorgegeben. Im Fall A erhöht er den Strom, weil ja nur 10Nm angreifen und er dafür sorgen muss, dass die Welle nicht abgebremst wird und im Fall B reicht der Strom nicht aus. Eine fixe Sollwertvorgabe macht hier ja nur wenig Sinn. Es ist mir klar dass der Regler für konstante Geschwindigkeit sorgen muss auvh wenn ein Moment auf der Welle angreift, der ja variiert. Aber wie bestimmt man wie hoch der Sollwert sein muss, wenn einmal die Gesch. von 15 und einmal 30kmh konstant gehalten werden muss? Oder ist der vorgegebene Sollwert bereits der maximale Wert?
:
Bearbeitet durch User
Markus K. schrieb: > Es ist mir klar dass der Regler für konstante Geschwindigkeit sorgen > muss auvh wenn ein Moment auf der Welle angreift, der ja variiert. Aber > wie bestimmt man wie hoch der Sollwert sein muss, wenn einmal die Gesch. > von 15 und einmal 30kmh konstant gehalten werden muss? > Oder ist der vorgegebene Sollwert bereits der maximale Wert? An der Stelle kommt dann ins Spiel, worauf du regeln willst. Wenn einmal die Geschwindigkeit von 15 und einmal von 30km/h gehalten werden soll, brauchst du einen anderen Regler, als wenn du auf konstantes Drehmoment regeln möchtest. Und andersrum, stellt sich je nach Steigung und sonstigen Widerständen, eine unterschiedliche Geschwindigkeit ein, wenn du auf konstantes Drehmoment regelst.
J. T. schrieb: > Markus K. schrieb: >> Es ist mir klar dass der Regler für konstante Geschwindigkeit sorgen >> muss auvh wenn ein Moment auf der Welle angreift, der ja variiert. Aber >> wie bestimmt man wie hoch der Sollwert sein muss, wenn einmal die Gesch. >> von 15 und einmal 30kmh konstant gehalten werden muss? >> Oder ist der vorgegebene Sollwert bereits der maximale Wert? > > An der Stelle kommt dann ins Spiel, worauf du regeln willst. Wenn einmal > die Geschwindigkeit von 15 und einmal von 30km/h gehalten werden soll, > brauchst du einen anderen Regler, als wenn du auf konstantes Drehmoment > regeln möchtest. Und andersrum, stellt sich je nach Steigung und > sonstigen Widerständen, eine unterschiedliche Geschwindigkeit ein, wenn > du auf konstantes Drehmoment regelst. Richtig, aber bei einer unterlagerten Stromregelung ist die Drehzahlregelung drum herum und es geht ja gerade darum beides zu regeln. Das heisst ich will eine konstante Geschwindigkeit (Tempomat) und möchte ja nicht dass ich langsamer oder schneller werde wenn ich bergauf oder ab fahre. Also muss ich das Moment auch regeln.
:
Bearbeitet durch User
Markus K. schrieb: >> 1. Auf was willst du regeln? >> Drehmoment, Drehzahl, Position, Motorstrom? > > Was hat das mit der Frage zu tun? Die Frage ist allgemein gestellt. Markus K. schrieb: > Das heisst ich will eine konstante Geschwindigkeit (Tempomat) und möchte > ja nicht dass ich langsamer oder schneller werde wenn ich bergauf oder > ab fahre. Also muss ich das Moment auch regeln. Die Frage war doch allgemein, jetzt ist es doch wieder speziell. :-) Nicht das Moment regeln. Geregelt wird auf die Sollgeschwindigkeit. Die Stellgröße ist der Motorstrom und damit das Drehmoment welches eine Geschwindigkeitsänderung bewirkt. Also Eingangsgröße des Reglers ist Geschwindigkeit, die Stellgröße aber der Strom. Der Regler kann ja nicht von sich aus einer bewegten Masse einfach eine andere Geschwindigkeit aufprägen - mal rein physikalisch betrachtet. Es braucht dazu einen Aktor, den Motor, und der braucht Strom (falls man die Spannung als konstant betrachtet).
Markus K. schrieb: > Das heisst ich will eine konstante Geschwindigkeit (Tempomat) und möchte > ja nicht dass ich langsamer oder schneller werde wenn ich bergauf oder > ab fahre. Also muss ich das Moment auch regeln. Das ist doch ähnlich wie bei Spannungs- und Stromquelle. Nehmen wir an, eine Spannungsquelle soll 12 V liefern. Damit sie diese konstanten 12 V liefern kann, muss sie den Strom entsprechend des Widerstands stellen. Sie will also auf Spannung regeln, stellt dabei aber am Strom herum. In gewissem Sinne ist also eine Spannungsquelle ein Stromsteller und umgekehrt.
Der Motor hat kein PT1 verhalten, wenn ich es richtig in Erinnerung habe. Wenn wir Wirbelstromverluste, die nichtlineare Magnetisierungskennlinie und Bürstenspannungen vernachlässigen: U_DC = R*I + L * dI/dt + U_IND U_IND = c_M Phi Omega M_M = c_K Phi I J * dOmega / dt = M_M - M_L U_DC = Ankerspannung I = Ankerstrom U_IND = Induzierte Spannung durch Bewegungsinduktion aka Gegen EMK Phi = Magnetischer Fluss (Erregerfluss). Für diesen Motor ist der Fluss konstant Omega = Winkelgeschwindigkeit M_M = Motormoment M_L = Lastmoment J = Trägheitsmoment c_M, c_K sind Maschinenkonstanten Damit kannst du ein Simulinkmodell aufstellen und ein paar Übertragungsfunktionen. Häufig wird eine Kaskadenregelung entworfen, d.h. ein Drehzahlregler (Drehzahl rückführen -> Strom ist Stellgröße) und ein Stromregler (Strom rückführen -> Stellgröße für die Leistungselektronik -> Ankerspannung ist Stellgröße) Das Stellglied für den Stromregler ist eine Leistungselektronische Schaltung, deren Dynamik auch mitmodelliert werden muss. Im einfachsten Fall kann man hier mal mit einer Totzeit ansetzen... Normalerweise wird der Stromregler auf gutes Führungsverhalten entworfen, der Drehzahlregler auf gutes Störverhalten.
Angehängte Dateien:
-

Kaskade.jpg
86 KB
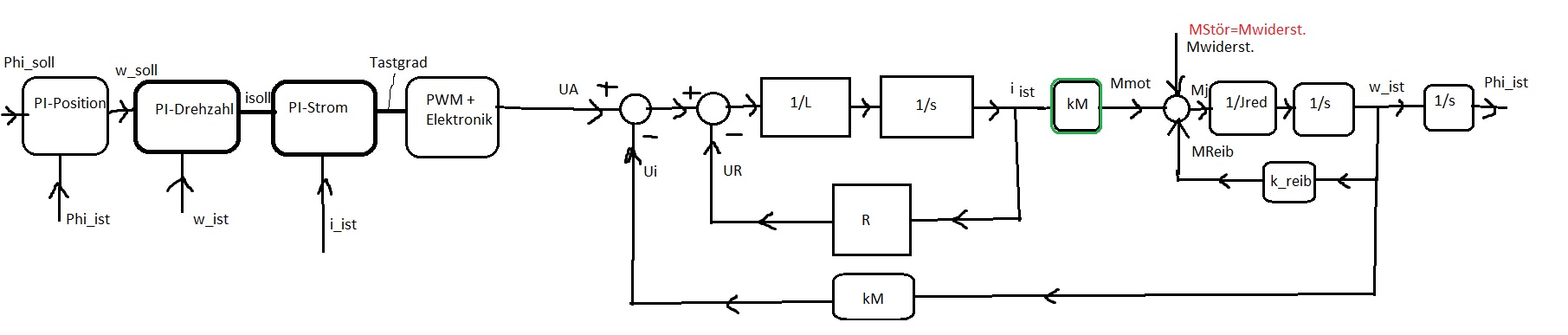
J. T. schrieb: > Markus K. schrieb: >> Das heisst ich will eine konstante Geschwindigkeit (Tempomat) und möchte >> ja nicht dass ich langsamer oder schneller werde wenn ich bergauf oder >> ab fahre. Also muss ich das Moment auch regeln. > > Das ist doch ähnlich wie bei Spannungs- und Stromquelle. Nehmen wir an, > eine Spannungsquelle soll 12 V liefern. Damit sie diese konstanten 12 V > liefern kann, muss sie den Strom entsprechend des Widerstands stellen. > Sie will also auf Spannung regeln, stellt dabei aber am Strom herum. In > gewissem Sinne ist also eine Spannungsquelle ein Stromsteller und > umgekehrt. Ja die Stromquelle stellt hier den Strom, damit die Spannung konstant auf 12V gehalten wird. Der Widerstand ist ja fix. Bei einem Motor ist es ähnlich, nämlich dass auch der Widerstand R im Motor fix ist. Ich kann aber den Strom nicht direkt stellen, sondern stelle den Strom, indem die Spannung genau genommen die Ankerspannung verändert wird. Es ist eigentlich immer die Ankerspannung, die entsprechend den berechneten Werten von den Reglern verändert wird. Das ist auch eigentlich die Antwort auf meine eigentliche Frage. Sophie T. schrieb: > Der Motor hat kein PT1 verhalten, wenn ich es richtig in Erinnerung > habe. > > Wenn wir Wirbelstromverluste, die nichtlineare Magnetisierungskennlinie > und Bürstenspannungen vernachlässigen: > > U_DC = R*I + L * dI/dt + U_IND > U_IND = c_M Phi Omega > M_M = c_K Phi I > J * dOmega / dt = M_M - M_L > > U_DC = Ankerspannung > I = Ankerstrom > U_IND = Induzierte Spannung durch Bewegungsinduktion aka Gegen EMK > Phi = Magnetischer Fluss (Erregerfluss). Für diesen Motor ist der Fluss > konstant > Omega = Winkelgeschwindigkeit > M_M = Motormoment > M_L = Lastmoment > J = Trägheitsmoment > c_M, c_K sind Maschinenkonstanten > > Damit kannst du ein Simulinkmodell aufstellen und ein paar > Übertragungsfunktionen. Häufig wird eine Kaskadenregelung entworfen, > d.h. ein Drehzahlregler (Drehzahl rückführen -> Strom ist Stellgröße) > und ein Stromregler (Strom rückführen -> Stellgröße für die > Leistungselektronik -> Ankerspannung ist Stellgröße) Das Stellglied für > den Stromregler ist eine Leistungselektronische Schaltung, deren Dynamik > auch mitmodelliert werden muss. Im einfachsten Fall kann man hier mal > mit einer Totzeit ansetzen... > > Normalerweise wird der Stromregler auf gutes Führungsverhalten > entworfen, der Drehzahlregler auf gutes Störverhalten. Vielen Dank Ob der Stromregler ein gutes Führungsverhalten oder Störverhalten haben soll, ist doch abhängig davon wo die Störgrösse doch wirkt.. entweder vor oder nach der Regelstrecke. Bei einem Eingreifen vor der Regelstrecke müsste so der Stromregler gutes Störverhalten haben und der Drehzahlregler gutes Führungsverhalten, hätte ich nun gemeint. Was ist nun aber, wenn die Störgrösse das Widerstandsmoment auf der Welle ist, und dieses eigentlich mitten in der Regelstrecke wirkt? Das ist ja dort, wo M_widerst. wirkt. Die Regelstrecke fängt ja schon dort an, wo UA ist. Also wirkt die Störgrösse mitten in der Regelstrecke. Siehe Bild Und wonach würde man den Regler auslegen, wenn noch eine Positionsregelung dazu käme, wenn die eine auf gute Führung und die andere auf gutes Störverhalten ausgelegt wurde? Siehe Bild
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.