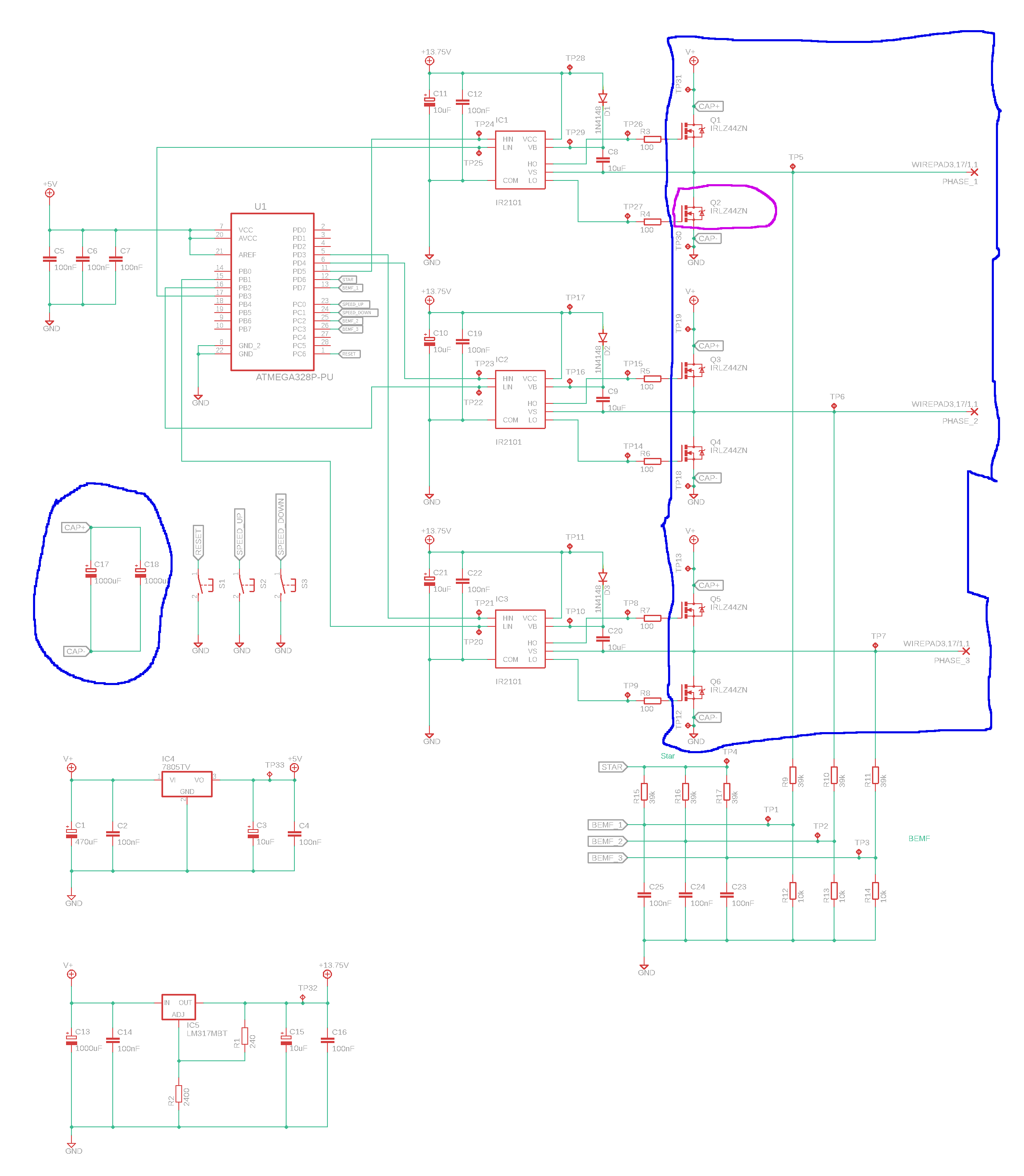
Hallo, ich versuche einen Electronic Speed Controller zum ansteuern von BLDC Motoren zu Übungszwecken aufzubauen. Ich orientiere mich an dieser Schaltung: https://www.youtube.com/watch?v=F8l9Z1HGYcU Es wird ein 4S LiPo verwendet. Der BLDC Motor ist ein Aeronaut actro-N 28-4-880 mit einem Maximalem Strom von 22 A (Kurzzeitig): https://aero-naut.de/produkt/actro-n-28-4-880/ Den Logikteil samt den Treibern habe ich auf einem Breadboard aufgebaut und den Leistungsteil auf einer Platine mit entsprechend ausreichenden Leitungen für die 22 A vom Motor (Bild: Siehe blaue Umrandung). Leider ist mir der N-Channel Mosfet Q2 (Bild: Lila markiert) beim anschalten der Schaltung durchgebrannt (Kurzschluß?). Ich überlege ob die Schaltung so richtig ist? Gegenüber der Schaltung von Youtube habe ich die Versorgungsspannung der Mosfet Treiber und die BEMF Widerstandswerte geändert, um unter die 5V Spannung für die Analogeingänge der MCU zu kommen. Auch habe ich die 6 Flyback Dioden parallel zu den jeweiligen Mosfets weggelassen, könnte es vielleicht daran liegen? Gruß
Angehängte Dateien:
-

sch_bldc.png
54 KB
Bernd O. schrieb: > Auch habe ich die 6 Flyback Dioden parallel zu den jeweiligen > Mosfets weggelassen, könnte es vielleicht daran liegen? Nun -- wozu mögen die wohl gedacht sein? Als Dekoration dienen die ganz sicher nicht. Was macht eine stromdurchflossene Spule, wenn der Strom schlagartig abgeschaltet wird? Du hast gerade herausgefunden, wozu Induktivitäten in Buck- bzw. Boostkonvertern dienen.
Harald K. schrieb: > Als Dekoration dienen die ganz sicher nicht. Die MOSFET enthalten doch schon solche Dioden parasitär.
Bernd O. schrieb: > Hallo, ich versuche einen Electronic Speed Controller zum ansteuern von > BLDC Motoren zu Übungszwecken aufzubauen. Welche Firmware?
Stefan F. schrieb: > Harald K. schrieb: >> Als Dekoration dienen die ganz sicher nicht. > > Die MOSFET enthalten doch schon solche Dioden parasitär. Das ist richtig, aber parallele Schottkydioden verringern die Verluste.
Steckbrett und sichere Verbindungen sind ein Widerspruch in sich. Wenn da auch nur eine Gateansteuerung ausfällt, ist die Zerstörung einer Halbbrücke praktisch sicher. Solange du experimentierst, musst du den Strom aus den Akkus begrenzen, denn ein Kurzer in einer Halbbrücke macht sonst sofort den MOSFet kaputt. Der Controller und die Gatetreiber müssen sicher arbeiten können, also kein Steckbrett, sondern Platine. BEMF Erkennung ist übrigens nicht trivial. Es gilt einerseits sicher zu erkennen, andererseits die hohen Spannungspitzen schlucken zu können. Geschickterweise hast du den Teil der Schaltung schon mal nicht gezeichnet.
Stefan F. schrieb: > Die MOSFET enthalten doch schon solche Dioden parasitär. Das sehe ich auch so. Wieviel Spannung erhalten nun die Mosfet-Treiber und wieviel Spannung erhält der Atmega? Hast du die Schaltung selber aufgebaut, verdrahtet und gelötet? Es können so viele Fehler passieren. Foto?
Ah, sorry, unten ist ja deine BEMF Schaltung. V+ muss anständig abgeblockt werden, um die Gegen EMK zu schlucken.
Die Schaltung ist prinzipiell ok, denn es ist ja China-Standard-Design. Nochmal die Frage nach der Firmware. Oder hast Du noch keine, und lässt die Ausgänge des µC floaten? Schlechte Idee -> shoot-thru!
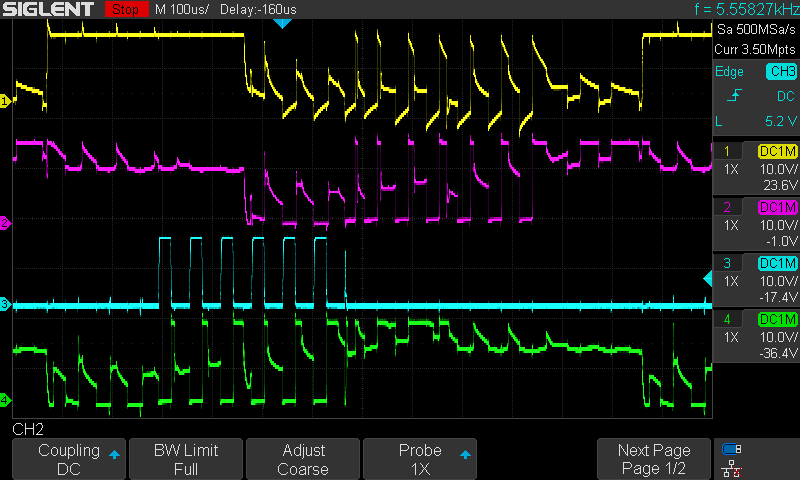
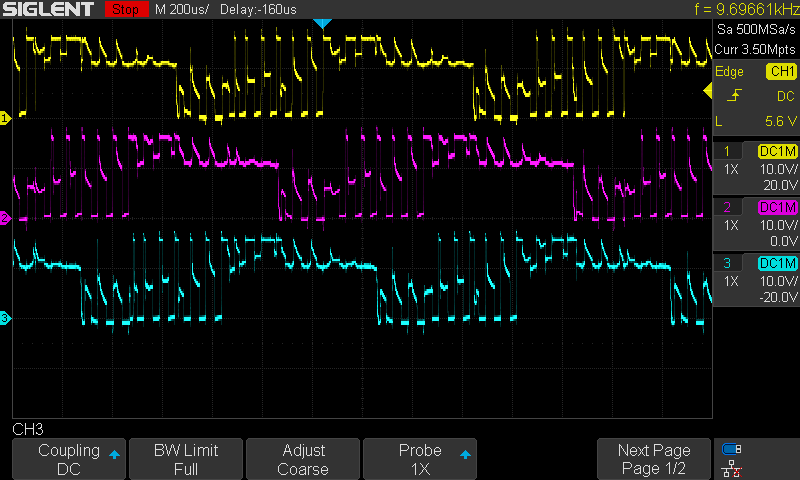
Hallo zusammen, ich konnte das Problem mit dem durchschlagen der Mosfets lösen. Die Lösung war ein 10kOhm Widerstand jeweils von dem Punkt zwischen dem Gate Kondensator und dem Gate zum Ground zu ziehen, sonst gab es einen shot through. Was ich auch noch an der Schaltung ergänzt habe, sind die 6 parallelen Flyback Dioden von Drain zu Source. Habe jetzt aber ein Problem das die 3 High Side Mosfets ziemlich schnell Heiß werden wenn der Motor läuft. Als boostrap Kondensator habe ich jetzt einen 100nF Keramik gewählt. Habe die Phasen auch als Phase A, -B, -C umbenannt. Dazu habe ich noch Ostilloskop Bilder aufgenommen (Pwm wird auf der Low Seite gemacht), Bild 1 (Gemessen An den Mosfets von A High(AH) und C Low(CL)): Gelb: AH Gate, Lila: AH Source, Blau: CL Gate, Grün: CL Drain Am Gelben Signal ist zu erkennen das es nach seinem High nicht wieder auf Low geht, wie es das blaue signal korrekterweise macht. Kann es vielleicht irgendetwas mit der Dimensionierung der Bootstrap Bauteile zu tun haben? Bild2 sind einfach nur die 3 Phasen am Motor. Die beiden Messungen wurden mit einem laufenden Motor gemacht.
Wilhelm M. schrieb: > Welche Firmware? Wilhelm M. schrieb: > Nochmal die Frage nach der Firmware. Und auch von mir: Welche Firmware? SimonK/BlHeli? Oder eine eigene? Warum nimmst du einen Atmega? Um das ganze zu besser zu beurteilen, mit dem Oszi folgende Signale messen: Gate High PhaseA PhaseA Gate Low PhaseA Am besten alles direkt an den Fets.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.