Hallo, mich interessiert: 1. Warum die Ausgangsamplitude umgeschaltet wird? 2. Wo ist der Unterschied zwischen Niedrigleistung und Hochleistung Modi? Danke.
Angehängte Dateien:
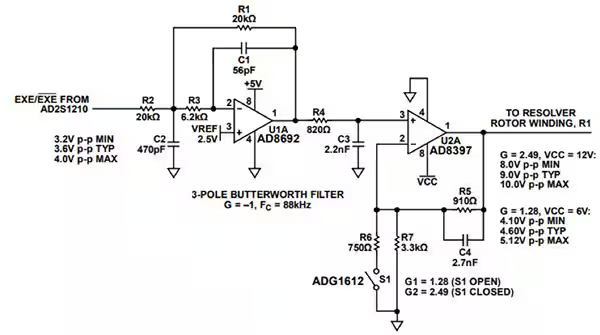
Alexander K. schrieb: > Hallo, > > mich interessiert: > > 1. Warum die Ausgangsamplitude umgeschaltet wird? Vielleicht beantwortet die Applikationsschrift von AD Deine Frage? Siehe Anhang. > 2. Wo ist der Unterschied zwischen Niedrigleistung und Hochleistung > Modi? Diese Frage verstehe ich nicht. Ein Resolver setzt keine (nennenswerte) Leistung um. Grüßle, Volker
Die Applikationschrift werde ich anschauen. Danke. Wegen zweite Frage: "Niedrigleistung und Hochleistung. Im Niedrigleistungsstatus arbeitet das einzelne +6-Volt-Versorgungssystem mit einem Stromverbrauch von unter 100 Milliampere (mA). Das gesamte System versorgt den Resolver mit 3,2 Volt effektiv (9,2 Volt Spitze-Spitze). Im Hochleistungsstatus arbeitet das System mit einer einzelnen +12-Volt-Versorgung und versorgt den Resolver mit 6,4 Volt effektiv (18 Volt Spitze-Spitze)" https://www.digikey.de/de/articles/how-to-precisely-determine-motor-angular-position-and-velocity-with-a-resolver Ich habe hier eine Platine aus dem Roboter, die Software steuert mit EE Poti die Ausgangsamplitude. Wofür und wann es umschaltet muss ich noch schauen. Vermutung: Vielleicht können unterschiedliche Resolver verwendet werden und durch Software umgeschaltet werden.
Alexander K. schrieb: > "Niedrigleistung und Hochleistung. Im Niedrigleistungsstatus arbeitet > das einzelne +6-Volt-Versorgungssystem mit einem Stromverbrauch von > unter 100 Milliampere (mA). Das gesamte System versorgt den Resolver mit > 3,2 Volt effektiv (9,2 Volt Spitze-Spitze). Im Hochleistungsstatus > arbeitet das System mit einer einzelnen +12-Volt-Versorgung und versorgt > den Resolver mit 6,4 Volt effektiv (18 Volt Spitze-Spitze)" > > https://www.digikey.de/de/articles/how-to-precisely-determine-motor-angular-position-and-velocity-with-a-resolver Ich würde das so interpretieren, dass sich die Aussage auf die von der Schaltung aufenommene Leistung bezieht. Aber das solltest Du die Autorin fragen. Ich kann leider nicht in ihren Kopf gucken. :-/ > Ich habe hier eine Platine aus dem Roboter, die Software steuert mit EE > Poti die Ausgangsamplitude. Wofür und wann es umschaltet muss ich noch > schauen. Gut, dass es nur einen einzigen Roboter gibt... > Vermutung: Vielleicht können unterschiedliche Resolver verwendet werden > und durch Software umgeschaltet werden. Was soll ich dazu sagen? Meine hellseherischen Fähigkeiten sind leider sehr beschränkt. Mein gesunder Menschenverstand sagt mir jedoch, dass es keinen großen Sinn ergibt, wenn die Amplitude der Resolvererregung per Software umgeschaltet werden kann, denn der Resolver muss ja von Hand ausgetauscht werden. Außer der Hersteller wechselt laufend die Resolvermodelle und die Elektronik soll sich selber an den jeweiligen Resolver anpassen, indem sie dessen Erregung solange erhöht, bis sie ein sinnvolles Eingangssignal erhält. Aber was soll ich sagen? Mir fehlen jegliche Informationen. Grüßle, Volker
Es geht um Kuka KRC1 und KRC2. Kuka schreibt: "The input voltage is a square--wave voltage from the processor. The frequency of 8 kHz is therefore determined by the software. The amplitude can be set by software in the range from 4.5 Vpp to 7 Vpp by means of an EE--potentiometer." Auf der Leiterplatte ist wirklich ein Digital Poti drauf und mit CPLD verbunden. Ich werde mit Oszilloskop anschauen, ob Unterschiede am Resolver bei den KRC1 und 2 gibt. Danke.
Volker B. schrieb: > Mein gesunder Menschenverstand sagt mir jedoch, dass es keinen großen > Sinn ergibt, wenn die Amplitude der Resolvererregung per Software > umgeschaltet werden kann, denn der Resolver muss ja von Hand > ausgetauscht werden. Ich denke es wurde wegen der Kompatibilität realisiert, damit RDC mit allen Robotern funktioniert.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.