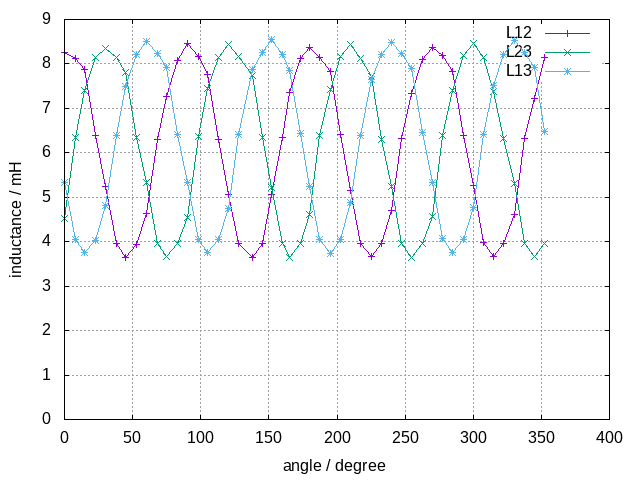

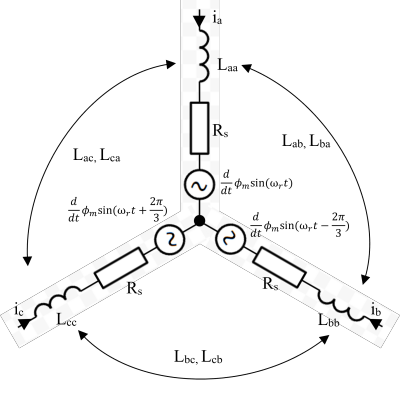
Ich beschäftige mich seit einer Weile mit Frequenzumrichtern, im Speziellen mit solchen, die Synchronmaschinen antreiben können. Aus einem Kompressor einer Klimaanlage habe ich abgebildeten Motor, mit dem ich meine FU-Eigenbauten entwickle. Das geht soweit auch ganz gut. Nun bin ich an einer Stelle, an der ich High Frequency Injection probieren möchte. Meine Überlegungen gehen in die Richtung, das PWM-Signal selbst, als Anregesignal für die Positionsbestimmung zu nutzen. In einem ersten Schritt möchte ich den PMSM in ein einfaches elektrisches Motormodell überführen, mit den wichtigsten Komponenten auch Zahlenmäßig determiniert, damit ich simulieren kann. Ein beispielhaftes ESB ist dem Internet entnommen(https://aesim-tech.github.io/simba-doc/model_library/images/manual/Electrical_Motors_pmsm_3phase_circuits.png). Mit einem einfachen L-Meter habe ich die Induktivität der einzelnen Stränge über die Rotorposition händisch aufgenommen. Man sieht auf jeden Fall eine schöne Positonsabhängigkeit der Induktivität. Nicht ist bisher bestimmt, die Kopplung der Spulen untereinander. Wie bestimme ich Induktivität, Streuinduktivität und Kopplung? Sicherlich ähnlich wie bei Trafos mit/ohne Kurzschuss der Sekundärseite!? Idealerweise kann später die FU-Firmware die Position aus diesen Messwerten errechnen..
Angehängte Dateien:
-

L_vs_angle.png
10 KB -

20240110_PMSM.jpeg
230 KB -

Electrical_Motors_pmsm_3phase_circuits-klein.png
42 KB
Moin, > Wie bestimme ich Induktivität, Streuinduktivität und Kopplung? > Sicherlich ähnlich wie bei Trafos mit/ohne Kurzschuss der > Sekundärseite!? Denke genau so, hier kurz beschrieben: https://www.wolfgang-wippermann.de/koppelfa.htm Du brauchst 3 Koppelfaktoren, aber die sind wegen Symmetrie alle gleich. Und 0 bis 90° reicht.... hat der Motor 2 Polpaare? Wie erkennt man, ob man mit magnetisch Nord- oder Südpol zu tun hat? Etwa daran, wie schnell bei gegebener Stromrichtung das Eisen in Sättigung geht (wie beim Fluxgate Magnetfeldsensor)? In dem Fall werden die Induktivitäten und Koppelfaktoren aber nichtlinear. Knifflig. Gruß, Roland
Hi Roland, danke für deine Antwort. Roland D. schrieb: > hat der Motor 2 Polpaare? Ja, sehr richtig, 2 Polpaare, 4 Pole und die Wicklungen im Dreieck. Ich werde das mal so machen wie besprochen und werde Rückmeldung geben. Den einen oder anderen interessiert es. Viele Grüße Silvio
Angehängte Dateien:
-

ESB.png
84 KB
{kind=link}
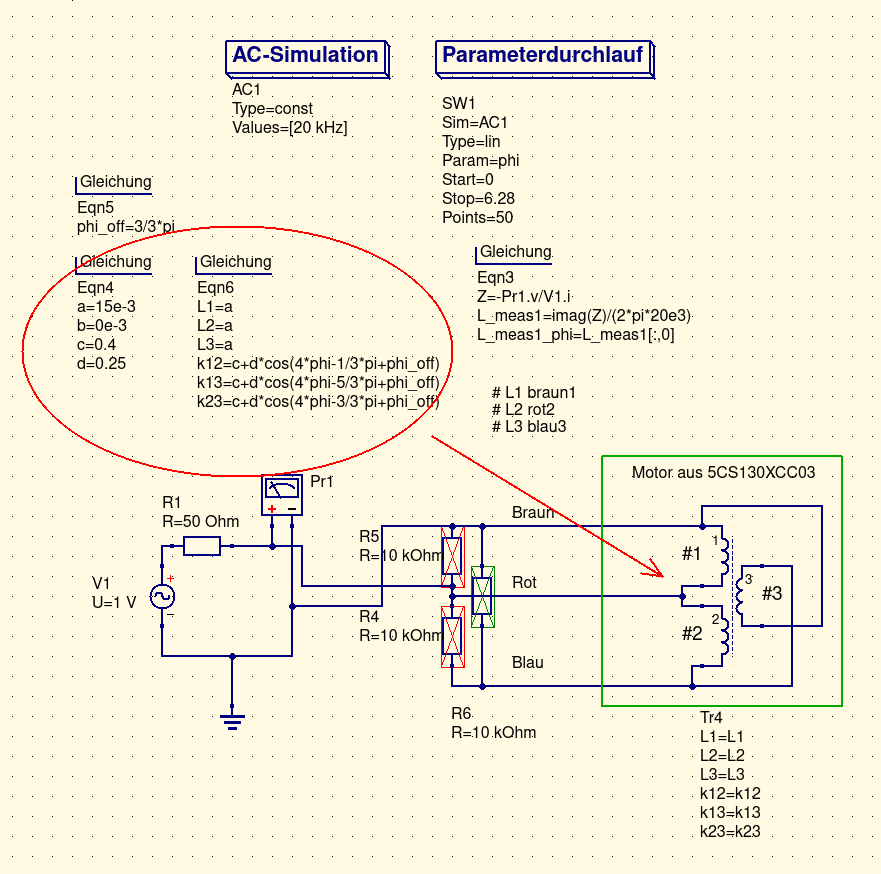
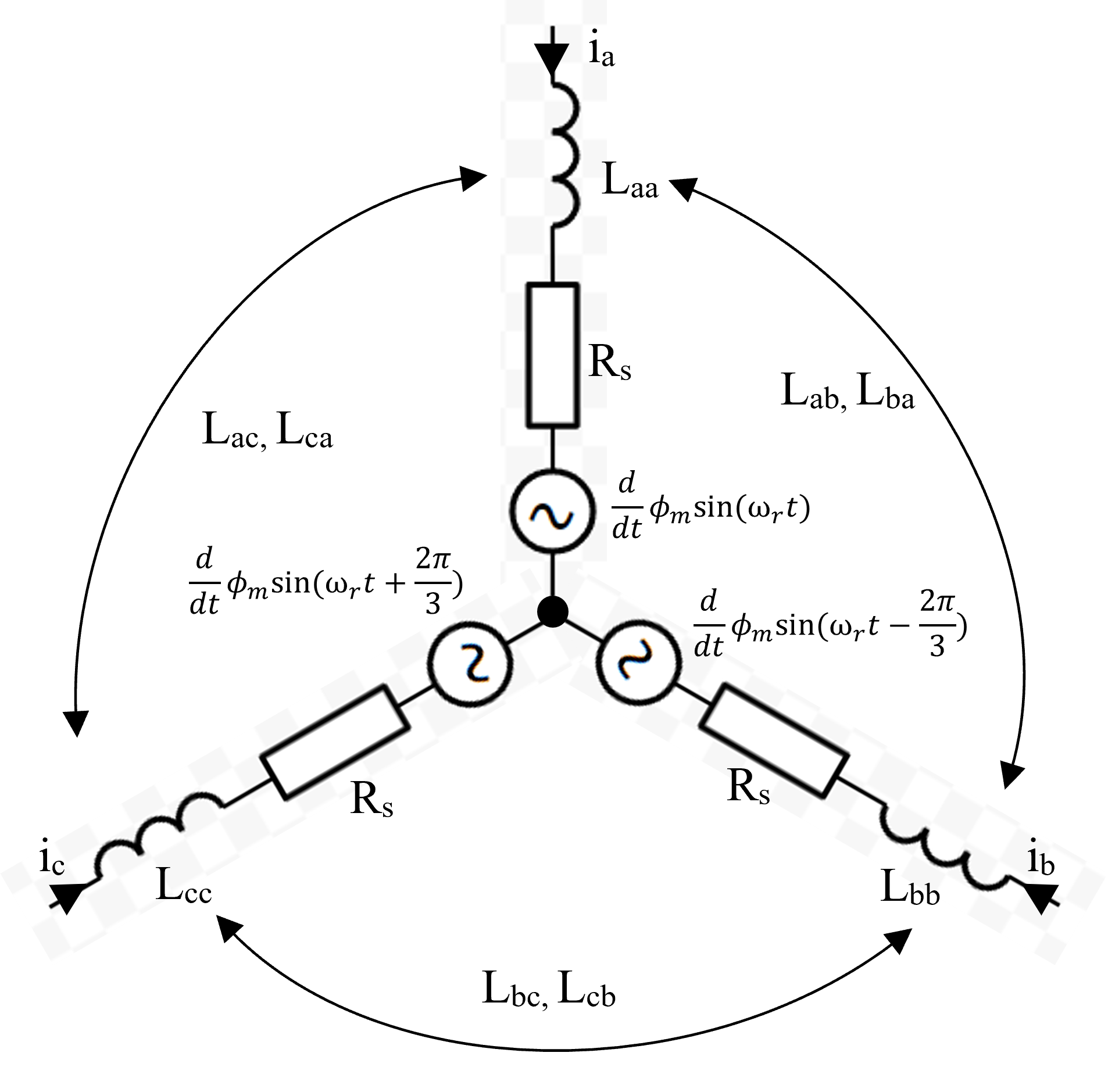
Für diejenigen die es interessiert: Das Ersatzschaltbild für den stehenden Motor mit 2 Polpaaren (4 Pole) sieht ungefähr so aus. Hauptaugenmerk liegt auf die rotorpositionsabhängigen Kopplungsfaktoren, die nach außenhin messbar sind. Verluste und die EMK sind vorerst nicht mit drinnen.
Moin, > Das Ersatzschaltbild für den stehenden Motor mit 2 Polpaaren (4 Pole) > sieht ungefähr so aus. Hauptaugenmerk liegt auf die > rotorpositionsabhängigen Kopplungsfaktoren, die nach außenhin messbar > sind. Aber die Induktivitäten sind ja auch positionsabhängig. Bleibt immer noch die Frage, wie man ermittelt, ob man Nordpol oder Südpol hat. Gruß, Roland
Hi Roland! > Aber die Induktivitäten sind ja auch positionsabhängig. Das dachte ich am Anfang auch, aber durch die Kopplung, die Positionsabhängig ist, scheinen die Induktivitäten nach außen auch abhängig. Das Modell bescheibt das so auch, obwohl die "freie", ungekoppelte Induktivität konstant ist. Sicher ist sie irgendwie auch positionabhängig, aber um mindestens eine Größenordnung kleiner und das ist mir in einem ersten Schritt nicht so wichtig. Die Messwerte konnte ich mit diesem Modell gut fitten. > Bleibt immer noch die Frage, wie man ermittelt, ob man Nordpol oder > Südpol hat. Geht deine Anmerkung in die Richtung, wegen der Doppeldeutigkeit? Wenn man ein Induktivitätstupel hat, kommen 2 Positionen in Frage. Meinst du das? Was passiert, wenn man das nicht löst? Dreht sich der Motor dann einmal links und einmal rechts rum? oder Hat er einmal 100% Drehmoment und einmal 0%?
Moin, Silvio K. schrieb: >> Aber die Induktivitäten sind ja auch positionsabhängig. > > Das dachte ich am Anfang auch, aber durch die Kopplung, die > Positionsabhängig ist, scheinen die Induktivitäten nach außen auch > abhängig. Das Modell bescheibt das so auch, obwohl die "freie", > ungekoppelte Induktivität konstant ist. Sicher ist sie irgendwie auch > positionabhängig, aber um mindestens eine Größenordnung kleiner und das > ist mir in einem ersten Schritt nicht so wichtig. Die Messwerte konnte > ich mit diesem Modell gut fitten. Das ist interessant aber trotzdem verstehe ich das nicht ganz. Bei der Messung der Induktivitäten hast du doch die Induktiviät.... stimmt! Die anderen Spulen sind bei der Messung ja gar nicht offen (stromlos) sondern alles hängt ja über die Dreiecksschaltung zusammen. >> Bleibt immer noch die Frage, wie man ermittelt, ob man Nordpol oder >> Südpol hat. > > Geht deine Anmerkung in die Richtung, wegen der Doppeldeutigkeit? Wenn > man ein Induktivitätstupel hat, kommen 2 Positionen in Frage. Meinst du > das? Ja, z.B. ermittelst du, dass die Nordpole oben/unten sind. Du kannst diesen Fall aber nicht davon unterscheiden, ob die Südpole oben/unten sind. > Was passiert, wenn man das nicht löst? Dreht sich der Motor dann einmal > links und einmal rechts rum? oder Hat er einmal 100% Drehmoment und > einmal 0%? Du schaltest den Strom ein (Drehzahl Null) und der Rotor befindet sich in einem instabilen Gleichgewicht. Eine kleine Störung und er 'springt' um 90° nach rechts oder links und schwingt dann. Wenn du jetzt auch noch die Drehzahl erhöhst, kommt er vielleicht gar nicht mehr mit. Genau das soll doch IMO vermieden werden. Gruß, Roland
Abermals Danke! > Das ist interessant aber trotzdem verstehe ich das nicht ganz. Bei der > Messung der Induktivitäten hast du doch die Induktiviät.... stimmt! Die > anderen Spulen sind bei der Messung ja gar nicht offen (stromlos) > sondern alles hängt ja über die Dreiecksschaltung zusammen. Ich habe mich unglücklich ausgedrückt. Das Ersatzschaltbild, mit konstanten Induktivitäten und rotorabhängiger Kopplung, bildet das gemessene Verhalten gut ab (Offene und kurzgeschlossenen Sek.-Windung). Die Kopplung bewirkt eine Mit- oder Gegenkopplung und verbiegt die intrinsische Induktivität. Ich denke, damit lässt es sich erst mal simulieren. Für meine eigene Erklärung gehe ich diesen Gedankengang: Wenn ich den Rotor mechanisch entferne, dann sind alle 3 Induktivitäten gleich groß und die Koppelfaktoren Konstanten und auch gleich groß. Alles ist symmetrisch.
Moin, Silvio K. schrieb: > Für meine eigene Erklärung gehe ich diesen Gedankengang: Wenn ich den > Rotor mechanisch entferne, dann sind alle 3 Induktivitäten gleich groß > und die Koppelfaktoren Konstanten und auch gleich groß. Alles ist > symmetrisch. Aber der Rotor ist ja nun mal da. Ich vermute, die Permanentmagnete verhalten sich bei der Induktivitätsmessung wie Luft (heißt, der magnetische Fluss hängt kaum von der angelegten Feldstärke ab). Ergo hast du je nach Winkel mal mehr, mal weniger Luft im magnetischen Kreis. Und das Magnetfeld wird mal eher so herum, mal eher andersherum durch die anderen Spulen gelenkt. Also irgendwie beides. Ist ja auch egal, auf jeden Fall kann man so den Winkel ermitteln. Ach ja, meine Idee von oben geht wohl nicht. Die Idee war, das gleiche Magnetfeld in allen Spulen aufbauen und sehen, welche zuerst in Sättigung kommt. So könnte man die Polung der Permanentmagnete ermitteln. Geht aber nicht, weil der Motor nur 3 Kabel hat. Damit das ginge, bräuchte man dem Motor in Sternschaltung mit herausgeführtem Sternpunkt. Dann könnte man an alle Phasen z.B. +1V bezogen auf den Sternpunkt anlegen. Und würde kein Drehmoment erzeugen. Geht aber mangels Sternpunkt nicht. Gruß, Roland
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.