Guten Morgen Forengemeinde, Achtung, Anfängerfrage - ich komme aus der Mechanik und habe leider wenig Verständnis von Elektrik, möchte aber gerne mehr verstehen. Zum Hintergrund: Ich habe mir einen Arduino-Motorcontroller gekauft (https://store.arduino.cc/products/arduino-mkr-motor-carrier) Dieser hat 3.5V oder 5V Eingangsspannung, ich möchte eine 5V Stromquelle anschliesen. ich gehe daher davon aus, dass die kleinen Motoren, die ich dazu gekauft habe, auch 5V sehen werden, und da keine Spannung gewandelt wird. Über die Arduin-Programmieroberfläche kann ich nun angeschlossene Servos und Gleichstrommotoren steuern, für die Servos mit: servo1.setAngle(int) - Set the rotation angle (from 0 to 180) für die Motoren mit M4.setDuty(int) - Set the duty cycle of the dc motor (from -100 to +100) , 0 means stop. Soweit so gut, das funktioniert auch alles. Also jetzt, Frage: Woher "weis" der Microcontroller, wie viel Strom er auf den Motor geben soll? Wie wird vermieden, dass da zuviel oder zu wenig Strom ankommt? Beim Gleichstrommotor versuche ich es mir so vorzustellen, dass bei M4.setDuty(100) "die Schleussen" am Controller auf sind, und kein Widerstand vorgeschaltet wird - also nur der Innenwiederstand (?) des Motors vorgibt, wie viel Strom maximal abgenommen werden kann. Wenn das so stimmt, dann wäre ja mit kleiner werdendem Widerstand auch die Leistung kleiner - und wenn der Innenwiderstand Null wäre, würde einfach keine Leistung mehr abgenommen werden - aber gleichzeitig habe ich doch dann einen Kurzschluss erzeugt? Und falls meine Annahme stimmt, dass der Micocontroller einen Widerstand vorschaltet um den Strom zu "dosieren" - wie weis er dann, welchen Widerstand er nimmt, so dass bei M4.setDuty(50) gerade die halbe maximale Leistung aufgenommen wird? Das klingt mir für mich selbst jetzt alles ein bisschen wie "old man rambling" - falls jemand mir trotzdem helfen kann das Thema zu verstehen würde ich mich sehr freuen. Vielen Dank im Vorraus, Max
Der Motor "nimmt" sich den Strom, den er braucht. Als grobe Faustregel kann man sagen, die angelegte Spannung bestimmt die Drehzahl des Motors, wenn der Motor mechanisch unbelastet ist. Wie viel Strom er sich nimmt, hängt davon ab, wie viel Drehmoment du dem Motor abforderst. Vorstellen kannst du dir das folgendermaßen: So ein Motor besteht aus Spulen, wenn du an eine Spule eine Spannung anlegst, steigt der Strom über die Zeit an. -> Unso länger du die Spannung anlegst, umso größer wird der Strom. Alle halbe (elektrische) Umdrehung, dreht der Kommutator die an die Spule angelegte Spannung um. Unso größer das angeforderte Drehmoment ist, umso langsamer dreht der Motor -> umso mehr Zeit hat der Strom anzusteigen. Wenn du eine größere Spannung anlegst, ist die Stromabstiegsgeschwindigkeit größer, der Strom wird schneller größer. Das Magnetfeld, und damit die Kraft die das Drehmoment generiert, hängt vom Strom ab. Das Drehmoment steht schneller zur Verfügung -> der Motor kann stärker Beschleunigen -> der Motor dreht schneller. Irgendwann dreht er so schnell, dass die Zeit zwischen den Umpolungen nicht mehr ausreicht, um einen Strom aufzubauen, der ein für weitere Beschleunigung ausreichendes Drehmoment generiert.
Max M. schrieb: > Woher "weis" der Microcontroller, wie viel Strom er auf den Motor geben > soll? Wie wird vermieden, dass da zuviel oder zu wenig Strom ankommt? Das ganze funktioniert anders. Der Strom wird schnell ein- und ausgeschaltet, mit einer Frequenz von einigen kHz. Das Zeitverhältnis zwischen der Einschaltzeit zur Periode wird Duty Cycle genannt und kann von 0 (nichtz) bis 100% (Maximum) gehen. Vorteil dieses Verfahrens: Die Verlustleistung im Schalttransistor wird minimiert. fchk
Max M. schrieb: > Beim Gleichstrommotor versuche ich es mir so vorzustellen, dass bei > M4.setDuty(100) "die Schleussen" am Controller auf sind, und kein > Widerstand vorgeschaltet wird - also nur der Innenwiederstand (?) des > Motors vorgibt, wie viel Strom maximal abgenommen werden kann. Durch den Innenwiderstand (ohne 'ie') zusammen mit der angelegten Spannung wird nur der Anlauf-/Blockierstrom des Motors festgelegt. Solange der Motor sich dreht, wird in der/den Spulen eine Spannung induziert, die von der von außen angelegten Spannung abgezogen werden muss, um aus dem Innenwiderstand zusammen mit dem Ohmschen Gesetz den Strom zu berechnen. J. T. schrieb: > Der Motor "nimmt" sich den Strom, den er braucht. Woher soll der Motor wissen, wieviel Strom er braucht? ;-)
Rainer W. schrieb: > J. T. schrieb: >> Der Motor "nimmt" sich den Strom, den er braucht. > > Woher soll der Motor wissen, wieviel Strom er braucht? ;-) Das erfährst du, wenn du meinen Text ganz liest. ;-)
J. T. schrieb: > ist die Stromabstiegsgeschwindigkeit größer, Sollte Stromanstiegsgeschwindigkeit heißen. Und die "unso" sollten eigentlich mal "umso" heißen. Offtopic: Vermaledeite Autokorrektur. Auch bei der Verbesserung hat sie wieder Abstieg draus gemacht. Wenn sie wenigstens konsistent blöd wäre...
Max M. schrieb: > Ich habe mir einen Arduino-Motorcontroller gekauft > (https://store.arduino.cc/products/arduino-mkr-motor-carrier) > Dieser hat 3.5V oder 5V Eingangsspannung, ich möchte eine 5V > Stromquelle anschliesen. ich gehe daher davon aus, dass die kleinen > Motoren, die ich dazu gekauft habe, auch 5V sehen werden, und da keine > Spannung gewandelt wird. Nöö, Dein Link sagt was von rated Voltage=6,5...11V, aus denen er für seinen internen Gebrauch 5V macht. Der Motor sieht aber das, was Du angelegt hast. > Also jetzt, Frage: > Woher "weis" der Microcontroller, wie viel Strom er auf den Motor geben > soll? Wie wird vermieden, dass da zuviel oder zu wenig Strom ankommt? Der weiß gar nichts. Der gibt nur eine Spannung vor (abhängig vomn Duty-Wert), und versucht, "Strom in den Motor reinzudrücken". Der Motor bestimmt dann, je nach seinen Eigenschaften und Lastzustand, wieviel Strom da durch geht. > Beim Gleichstrommotor versuche ich es mir so vorzustellen, dass bei > M4.setDuty(100) "die Schleussen" am Controller auf sind, und kein > Widerstand vorgeschaltet wird - also nur der Innenwiederstand (?) des > Motors vorgibt, wie viel Strom maximal abgenommen werden kann. Wenn das > so stimmt, dann wäre ja mit kleiner werdendem Widerstand auch die > Leistung kleiner - und wenn der Innenwiderstand Null wäre, würde einfach > keine Leistung mehr abgenommen werden - aber gleichzeitig habe ich doch > dann einen Kurzschluss erzeugt? Ist jetzt müßig, all diese Gedankengängen zu folgen, weil Du offensichtlich den Begriff "Widerstand" falsch herum interpretierst. Aber die anderen haben das ja schon einigermaßen erklärt. Letztlich ist das doch genau so wie z.B. in der Wasserversorgung. Wasserpumpe mit Druckkessel halten möglichst einen konstanten Druck (Spannung), der von mir aus auch einstellbar ist (setDuty), und der Wasserhahn ist Dein Verbraucher, der dann einen gewissen Wasserdurchfluß ermöglich (Strom). Der Öffnungsgrad des Wasserhahns ist dann der Innenwiderstand bzw. Last des Motors. Je offener der Hahn ist, um so geringer ist der Flußwiderstand, also fließt entsprechend mehr Wasser pro Zeiteinheit (eben wie der el. Strom). Hier gilt praktisch genau so das ohmsche Gesetzt: I=U/R -> I_wasser=P_wasser/R_hahn > Und falls meine Annahme stimmt, dass der Micocontroller einen Widerstand > vorschaltet um den Strom zu "dosieren" - wie weis er dann, welchen > Widerstand er nimmt, so dass bei M4.setDuty(50) gerade die halbe > maximale Leistung aufgenommen wird? Erstens setzt er keinen Widerstand (das wäre bei analoger Ansteuerung der Fall), sondern er benutzt Pulsweitenmodulation. Er dosiert also die Spannung (und damit auch den Strom/Leistung) in kleinen Häppchen. Bei M4.setDuty(50) also offensichtlich 50% ein, 50% aus, und das ganz schnell hintereinander (kHz-Bereich).
Frank K. schrieb: > Das ganze funktioniert anders. Der Strom wird schnell ein- und > ausgeschaltet, mit einer Frequenz von einigen kHz. Das Zeitverhältnis > zwischen der Einschaltzeit zur Periode wird Duty Cycle genannt und kann > von 0 (nichtz) bis 100% (Maximum) gehen. Vorteil dieses Verfahrens: Die > Verlustleistung im Schalttransistor wird minimiert. Das stimmt zwar, macht das ganze für einen Anfänger aber unnötig kompliziert. Da die PWM für die Spule effektiv nicht anders aussieht, als würdest Betriebsspannung mal PWM-Faktor anlegen.
Jens G. schrieb: > Der weiß gar nichts. Der gibt nur eine Spannung vor (abhängig vomn > Duty-Wert), und versucht, "Strom in den Motor reinzudrücken". Um "Strom in den Motor reinzudrücken" müsste der Treiberbaustein als Stromquelle arbeiten. Tut er das wirklich? Dazu müsste das Tastverhältnis des PWM-Signals durch eine Regelschleife mit einem Stromsensor kontrolliert werden.
Max M. schrieb: > Woher "weis" der Microcontroller, wie viel Strom er auf den Motor geben > soll? Wie wird vermieden, dass da zuviel oder zu wenig Strom ankommt? Sieh Dir mal einen Staubsauger und eine Nachttischlampe an. Der Staubsauger hat 1200 Watt Leistung, die Nachttischlampe (mit LED-Birne) hat 2 Watt Leitung. Beide aber kannst Du mit einem Stecker in eine Steckdose stecken, ohne vorher an der Steckdose einstellen zu müssen, wie viel Strom die angeschlossenen Geräte abbekommen dürfen. Und jetzt stell' Dir mal zwei Schweine und einen gut gefüllten Futtertrog vor. Das eine Schwein ist ein gerade abgesäugtes Ferkel, klein und niedlich, das andere Schwein ist mehrere Jahre alt und wiegt weit über 100 kg. Auch hier muss am Futtertrog nicht eingestellt werden, daß das kleinere Schwein weniger Futter abbekommt als das große Schwein. Der entscheidende Punkt: Beide nehmen sich soviel, wie sie brauchen. Und das ist beim Staubsauger und der Nachttischlampe genauso.
Rainer W. schrieb: > Woher soll der Motor wissen, wieviel Strom er braucht? Das spürt der Motor von selbst. Wenn der Motor im Leerlauf läuft, dann nimmt er sich aus dem fiktiven Eimer, gefüllt mit Strom, eine Hand von raus. Wenn der Motor an seiner Antriebswelle mechanisch gebremst wird, dann schaufelt er sich zwangsläufig mit beiden Händen hektisch den kostbaren Strom schnell aus dem Eimer raus, ohne dass die Versorgungsspannung zusammenbricht. Die Voraussetzung ist, dass der Eimer immer randvoll mit Strom gefüllt ist. Da muss also jemand vor Ort sein, der fleissig den Strom bis oben hin nachfüllt und somit die Versorgungsspannung konstant hält!
Für den Mechaniker/Maschinenbauer hilft eine einfache Analogie. Ein Mechanismus (Gewindespindel) drückt einen Stoßdämpfer mit konstanter Geschwindigkeit zusammen. Die Geschwindigkeit entspricht der Spannung (5V am Arduino). Dazu ist eine bestimmte Kraft (beim Arduino der Strom des Motortreibers) notwendig, welche durch den Stoßdämpfer fließt. Ein kleiner Stoßdämpfer benötig weniger Kraft als ein großer Stoßdämpfer. Die Leistung, welche am Stoßdämpfer in Wärme umgewandelt wird, ist das Produkt aus der Geschwindigkeit und der Kraft. Die Leistung, die der Motor aufnimmt, ist das Produkt aus Spannung und Strom. Zurück zu deiner Frage. Woher weiß der Stoßdämpfer mit welcher Kraft ich ihn zusammendrücken muss? Genau mit der Kraft, die notwendig ist um eine bestimmte Geschwindigkeit beim Zusammendrücken zu erreichen. Drücke ich ganz langsam, benötige ich sehr wenig Kraft. Drücke ich sehr schnell, benötige ich eine viel höhere Kraft.
Rainer W. schrieb: > Um "Strom in den Motor reinzudrücken" müsste der Treiberbaustein als > Stromquelle arbeiten. Tut er das wirklich? > Dazu müsste das Tastverhältnis des PWM-Signals durch eine Regelschleife > mit einem Stromsensor kontrolliert werden. Ob Strom- oder Spannungsquelle, beides sind Quellen, die Spannung und Strom haben/liefern können. Und wenn die eine Spannung haben können, dann versuchen diese bei jeder passenden Gelegenheit, Strom zu liefern. Oder, wenn man bei dem Vergleich Spannung <-> Druck bleiben will, Strom reinzudrücken. Das beide Quellenarten etwas andere Charakteristiken haben, tut hier nix zur Sache.
Joe G. schrieb: > Drücke ich ganz langsam, benötige ich sehr wenig Kraft. Drücke ich sehr > schnell, benötige ich eine viel höhere Kraft. Den Punkt würde ich andersherum formulieren. Drücke ich mir wenig Kraft, bewegt der Dämpfer sich langsam, drücke ich mir mehr/viel Kraft, bewegt er sich schneller/schnell. Wobei ich beim Motor/Spule die Analogie mit ner Turbine mit Schwungrad passender finde. Anfänglich haben wir an Turbineneingang und Ausgang die selbe Wasserhöhe (an der Spule liegt keine Spannung an). Jetzt erhöhen wir den Wasserstand am Eingang (wir legen Spannung an die Spule an). Die Turbinenblätter stehen dem wegen des Drucks strömen wollendem Wasser im Weg (die Induktivität der Spule stellt sich dem "strömen der Elektronen" entgegen. Hier fängt das Modell ein wenig zu hapern an, da eine Turbine die Energie kinetisch in Schwungrad speichert, anstatt ein Magnetfeld aufzubauen). Die Turbine fängt zu drehen an, die Blätter "stehen weniger im Weg". Es fließt immer mehr Wasser. (Strom in der Spule steigt an). Nimmt man den Wasserstand am Eingang wieder zurück, schaufelt die Turbine wegen dem Schwungrad weiter Wasser, wird dadurch aber abgebremst. (Schaltet man die Spannung über der Spule ab, schiebt das zusammenbrechende Magnetfeld weiter einen Strom).
Frank K. schrieb: > Das ganze funktioniert anders. Der Strom wird schnell ein- und > ausgeschaltet, mit einer Frequenz von einigen kHz. Das Zeitverhältnis > zwischen der Einschaltzeit zur Periode wird Duty Cycle genannt und kann > von 0 (nichtz) bis 100% (Maximum) gehen. Vorteil dieses Verfahrens: Die > Verlustleistung im Schalttransistor wird minimiert. Was fur ein Unsinnsantwort, Frage nicht verstanden oder vorsätzliche Verwirrung stiften wollen ?
Angehängte Dateien:
-

Exzenter.jpg
53 KB
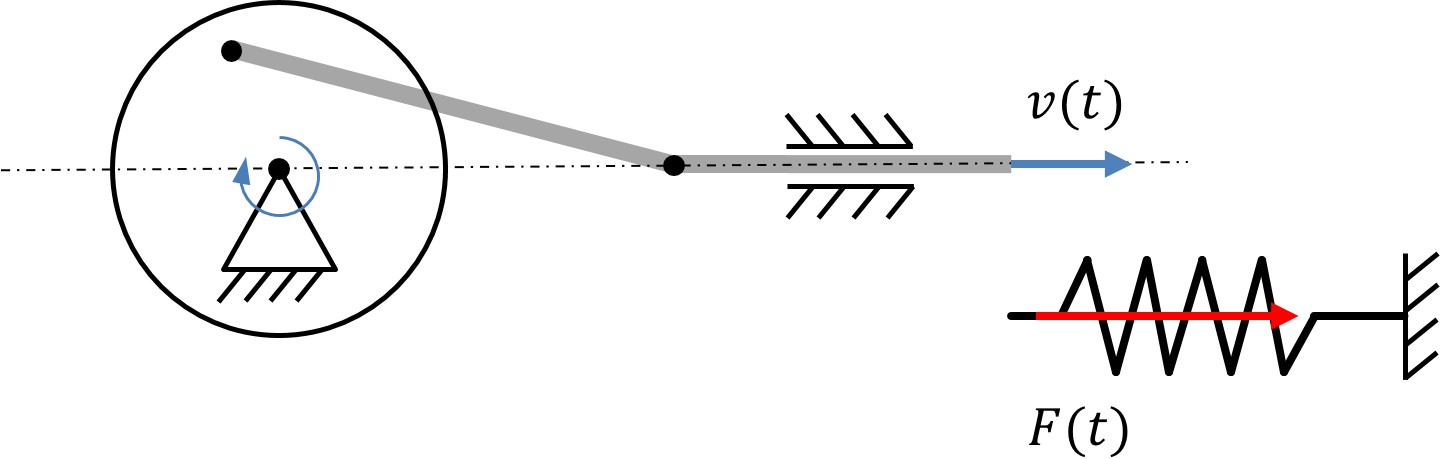
J. T. schrieb: > Joe G. schrieb: >> Drücke ich ganz langsam, benötige ich sehr wenig Kraft. Drücke ich sehr >> schnell, benötige ich eine viel höhere Kraft. > > Den Punkt würde ich andersherum formulieren. Drücke ich mir wenig Kraft, > bewegt der Dämpfer sich langsam, drücke ich mir mehr/viel Kraft, bewegt > er sich schneller/schnell. In der Mechanik kann die ideale Spannungsquelle z.B. durch ein Exzenter beschrieben werden. Das Ende der Exzenterstange hat eine bestimmte (periodische) Geschwindigkeit. v(t) entspricht U(t) Die Kraft am Ende der Stange ist null. In der Analogie - es fließt kein Strom. Jetzt bringe ich eine verlustbehaftete Feder am Ende der Stange an. Die Geschwindigkeit bleibt gleich, aber es fließt eine bestimmte Kraft durch die Feder. Die sich einstellende Kraft hängt (bei gegebener Geschwindigkeit) von der Federkonstanten und dem Reibkoeffizienten der Materialreibung ab.
Max M. schrieb: > Wenn das > so stimmt, dann wäre ja mit kleiner werdendem Widerstand auch die > Leistung kleiner Nehmen wir Betriebsspannug 10 Volt. Der Motor mit großem Widerstand hat 10 Ohm, wenn er blockiert ist, der mit kleinem Widerstand 1 Ohm, wenn er blockiert ist. U = R x I // : R => U/R = I 10 V / 10 Ohm = 1A, für den hochohmigen Motor 10 V / 1 Ohm = 10A, für den niederohmigen Motor P = U x I 10 V x 1 A = 10 W, für den hochohmigen Motor 10 V x 10 A = 100W, für den niederohmigen Motor. Da die Welle blockiert ist, wird keine mechanische Leistung abgegeben. Die gesamte Leistung wird am ohmschen Widerstand der Spulen in Wärme umgesetzt. Den Zwischenschritt den Strom auszurechnen kann man sich übrigens auch sparen: P = U x I, I = U/R // für I einsetzen => P = U x U/R = U^2 / R (10 V)^2 / 10 Ohm = 10 W (10 V)^2 / 1 Ohm = 100 W
Joe G. schrieb: > Jetzt bringe ich eine verlustbehaftete Feder am Ende der Stange > an. Die Geschwindigkeit bleibt gleich, aber es fließt eine bestimmte > Kraft durch die Feder. Die sich einstellende Kraft hängt (bei gegebener > Geschwindigkeit) von der Federkonstanten und dem Reibkoeffizienten der > Materialreibung ab. Feder != Dämpfer Feder "=" Wegabhängige Kraft, Dämpfer "=" geschwindigkeitsabhängige Kraft. Aber das wirst du selbst wissen. Sowohl mit Federn als auch mit Dämpfern kannst du brauchbare Analogien konstruieren, ich persönlich finde aber das Wassermodell irgendwie "brauchbarer". Das sollte nur ein Hinweis auf eine weitere Analogie sein, es sollte deine nicht in Frage in stellen.
Hat der Autistentreff heute Freigang?
J. T. schrieb: > Feder != Dämpfer Unbestritten unterscheiden sich ideale Bauelemente (R,L,C) von realen Bauelementen. Deshalb habe ich auch von einer „verlustbehafteten Feder“ gesprochen. Das ist jedoch nicht der Punkt. Ich habe bewusst das Beispiel einer idealen spannungsquelle gewählt (Exzenter). Ich hätte auch mit einer idealen Kraftquelle arbeiten können (z.B. Hydraulikzylinder). In diesem Fall würde sich über dem Dämpfer eine bestimmte Geschwindigkeit einstellen. Wie man nun sieht, hängt die Beschreibung vom gewählten Modell ab, wobei die Analogie natürlich nicht verletzt wird. Haben wir nun eine reale Spannungs- oder Stromquelle (sie können ja ineinander umgerechnet werden) stellt sich ein ganz bestimmter Arbeitspunkt unter Last ein. Zum grundlegenden Verständnis ist jedoch die Erklärung an einem idealen Modell einfacher. Natürlich wäre auch ein Wassermodell brauchbar. Hier sollten wir jedoch mit Druckdifferenz und Massenstrom arbeiten, um die Analogie einzuhalten.
Harald K. schrieb: > Hat der Autistentreff heute Freigang? Ja, schon den ganzen Tag und er freut sich auf jeden Bewunderer am Wegesrand :-)
Harald K. schrieb: > Hat der Autistentreff heute Freigang? Natürlich! Du etwa nicht? Außerdem scheint heute die Sonne. Das ist dann doppelt so schön ;) 🌞
Jens G. schrieb: > Ob Strom- oder Spannungsquelle, beides sind Quellen, die Spannung und > Strom haben/liefern können. Nur benehmen sie sich ganz unterschiedlich.
Jens G. schrieb: > Ob Strom- oder Spannungsquelle, beides sind Quellen, die Spannung und > Strom haben/liefern können. Nur benehmen sie sich ganz unterschiedlich. Die Stromquelle hält, wie der Name schon sagt, den Strom konstant, die Spannungsquelle die Spannung. Der Innenwiderstand einer Spannungsquelle ist idealerweise 0Ω, der einer Stromquelle unendlich. Erkennst du den Unterschied?
Rainer W. schrieb: > Die Stromquelle hält, wie der Name schon sagt, den Strom konstant, die > Spannungsquelle die Spannung. Das verwirrende ist aber, dass die Stromquelle die Spannung "steuert", um den Strom konstant zu halten, und die Spannungsquelle "steuert" den Strom, um die Spannung konstant zu halten. Realen Exemplaren gehen aber irgendwann die Puste aus :D
J. T. schrieb: > Das verwirrende ist aber, dass die Stromquelle die Spannung "steuert", > um den Strom konstant zu halten, und die Spannungsquelle "steuert" den > Strom, um die Spannung konstant zu halten. Der Stromquelle ist die Spannung am Ausgang völlig egal. Notfalls legt sie Hochspannung an ihren Innenwiderstand an und fertig. Den Rest beschreibt das ohmsche Gesetz ausreichend genau, solange der Widerstand der Last klein gegen den Innenwiderstand ist. Und auch die Spannungsquelle schert sich einen Dreck um den Strom. Am Strom steuert die überhaupt nichts. J. T. schrieb: > Realen Exemplaren gehen aber irgendwann die Puste aus :D Ja und - so ist die reale Welt. Das ändert aber nichts am Prinzip. Solange die Strom- bzw. Spannungsquelle auf die Last abgestimmt ist, passiert das nicht.
Rainer W. schrieb: > Der Stromquelle ist die Spannung am Ausgang völlig egal. Notfalls legt > sie Hochspannung an ihren Innenwiderstand an und fertig Genau das sag ich doch. Im Zweifel "steuert" sie auf Hochspannung, oder ihr geht die Puste aus. Oder die Spannung stellt sich ein, wie auch immer man es nennen möchte. Selbiges bei der Spannungsquelle, nur andersrum.
J. T. schrieb: > Selbiges bei der Spannungsquelle, nur andersrum. Dann verrate bitte einmal, wer z.B. bei einem Autoakku (klassisch Pb-PbSO4) irgend etwas am Strom steuert. Der Akku ganz bestimmt nicht, solange ein Verbraucher daran nicht im Bereich der Leistungsanpassung betrieben wird.
Es ist halt die Frage ob die Batteriespannung sich den Widerstand anguckt und dem Strom dann sagt "Mach schneller, sonst brech ich ein" oder ob der Widerstand dem Strom sagt "bis hier und nicht weiter"
Rainer W. schrieb: > Ja und - so ist die reale Welt. Das ändert aber nichts am Prinzip. Nur interessiert hier niemanden das Prinzip, bzw. hat keiner danach gefragt. Du bist auf dem Holzweg, oder auch im falschen Thread. Kannst nun aufhören mit Krümelkacken ...
Hallo die ganzen mechanischen vergleiche, sind zwar sehr gut verständlich und funktionieren für die Praxis (Auswirkungen) auch sehr gut, aber letztendlich sieht es in der physikalischen Wirklichkeit und was wirklich dahinter steht doch deutlich anders und ganz bestimmt nicht leicht verständlich (schon gar nicht leicht zu Erklären) aus. Das fängt schon damit an, was elektrische Spannung und Strom, den wirklich im Detail sind (bewegte Ladungsträger ist nur ein Teil der Wahrheit - was ist eigentlich Ladung in Wirklichkeit - also nicht als reine, wenn auch gut funktionierende Modellvorstellung und mathematisches Konzept?) und vieles mehr, was zwar für die gelebte Praxis und auch die meisten tiefergehenden Berechnungen nicht wirklich von Belang ist, aber letztendlich dann doch anders als unsere Modelle und Vorstellungen ist. Aber es fängt schon früher an: Was z.B. ein Volt (Spannung) ist, und wie diese "entsteht", definiert ist, die physikalischen Grundlagen, die sie bedingen ist alles andere als leicht verständlich und (eben nicht) intuitiv zu erfassen. Da kommt sogar teilweise die Mechanik direkt (nicht als bildliche Vorstellung)wieder mit ins Spiel. Und das ist nur ein Aspekt, auch der elektrische Widerstand ist wesentlich verzwickter als es das Ohm'sche Gesetz (das ja nur Beziehungen darstellt) erklären kann oder die Modelle welche man in der Schule und oder Grundlagenkurse der E- Technik lernt. Aber jetzt bin ich weit abseits, von dem, was der TO anfragt und was man auch in der "höheren" und praktischen E- Technik in 99,99x Prozent benötigt. Wer allerdings wirklich wissen will, was Strom, Spannung usw. auch unterster Ebene ist, was eigentlich Ladungen und Felder (nicht die vom Landwirt) sind, der wird mit Konzepten und Erklärungen konfrontiert, die extrem schwer verständlich (Ich muss da schon früh aufgeben) und teilweise extrem fern von unseren Alltagserfahrungen und unseren "gesunden Menschenverstand" sind, aber glaubt man den wenigen Spezialisten (was man muss, wenn man nicht in derselben Liga mitspielt, und das schafft halt kaum einer) dann geht es nicht anders und funktioniert sehr gut.
@ Max M.: Nachfolgend das Wesentliche: - Für den (hier verwendeten, permanent erregten) DC-Motor gilt bei konstanter Spannung prinzipiell folgende Kennlinie: https://de.wikipedia.org/wiki/Datei:Kennlinie_Nebenschluss-Gleichstrommaschine.svg - Bei kleinen Motoren und/oder kleiner Spannung ist diese Kennlinie "weicher" als die eines Motors im kW-Bereich und 220 V. "Weicher" heisst, sie ist stärker geneigt => bei größerem Drehmoment gibt die Drehzahl stärker nach. - Die Leerlaufdrehzahl ist proportional zur speisenden Spannung (idealerweise, d.h. Reibung vernachlässigt; dabei fliesst kein Strom!). - Die Spannung hängt hier vom Pulsweitenverhältnis des Stellers ab. - Das Drehmoment ist drehzahlunabhängig (fast) proportional zum Strom => wird also antriebsseitig mehr Moment gefordert, steigt der Strom - und die Drehzahl gibt etwas nach.
Angehängte Dateien:
-

MKR_Anschluesse.png
120 KB

{kind=link}
Guten Abend zusammen, vielen lieben Dank für die ganzen Erklärungen! Ich bin begeistert, das hat sehr geholfen. Eine Frage ist jetzt für mich allerdings völlig unerwartet aufgekommen: Wie jemand richtig geschrieben hat, ist die "Rated voltage" 6.5- 11.1V - das hatte ich komplett falsch verstanden, da ich nur auf die Anschlüsse geschaut hatte (siehe Screenshot), und dachte, es gibt die Wahl zwischen 3.5V und 5V. Aber gut, jetzt verstanden, der Controller will irgendwas zwischen 6.5V und 11.1V und macht dann 5V draus. Daher: mit welcher Quelle soll ich den Controller denn jetzt betreiben, und wo schließe ich + und - an? Warum gibt es Eingänge für 3.5V und 5V, wenn beides unterhalb der rated voltage liegt? Falls jemand einen konkreten Vorschlag für ein günstiges Gerät von einer externen Website hat würde ich mich freuen. Ich würde davon ausgehen, dass niemals mehr als 10W gebraucht werden. (Bevor die Frage kommt, aktuell läuft das ganze noch über den Arduino, der mit USB Kabel an den PC verbunden ist, aber soll bald mit externer Quelle und größeren Motoren betrieben werden)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.