Moin, Ich klaube mir gerade aus dem Internet verschiedene Möglichkeiten zusammen, einen TDA1085 durch eine Mikrocontroller-Steuerung zu ersetzen. Da haben wir zum einen das AKO Board, das in tausenden Geräten verbaut ist und zum anderen die Steuerung eines russischen Entwicklers auf uC-Basis. Zunächst einmal verzichtet die russische Variante auf den Gleichrichter und die Induktivitäten. Nun habe ich aus meinem letzten Beitrag hierzu gelernt, dass der Gleichrichter dem Tyristor das schalten im Nullpunkt bei Phasenverschiebung ermöglicht. Warum kann die russische Schaltung darauf verzichten? Die Induktivitäten werden meiner Ansicht nach der Strombegrenzung dienen, wenn die steilflankigen Signale der Phasenanschnittsteuerung auf die Motorwicklung treffen. Da der russische Kollege die Schaltung für seine Bandsäge verwendet, welche er mit einem Waschmaschinenmotor antreibt und auch der Motor meiner Drehmaschine verblüffende Ähnlichkeit mit dem Aggregat aus meiner Waschmaschine hat, sollten die physikalischen Gesetzmäßigkeiten etwa die selben sein. Ich könnte mir vorstellen, dass Betriebssicherheit und Langlebigkeit bei der Maschinensteuerung einen anderen Stellenwert haben, als bei dem Entwickler. Könnte es noch andere Gründe geben, warum diese Bauteile in der uC-Steuerung fehlen?
Angehängte Dateien:
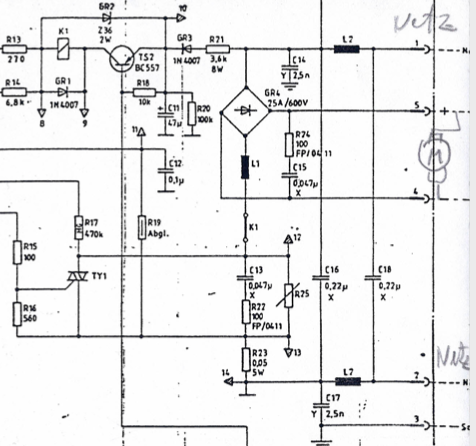
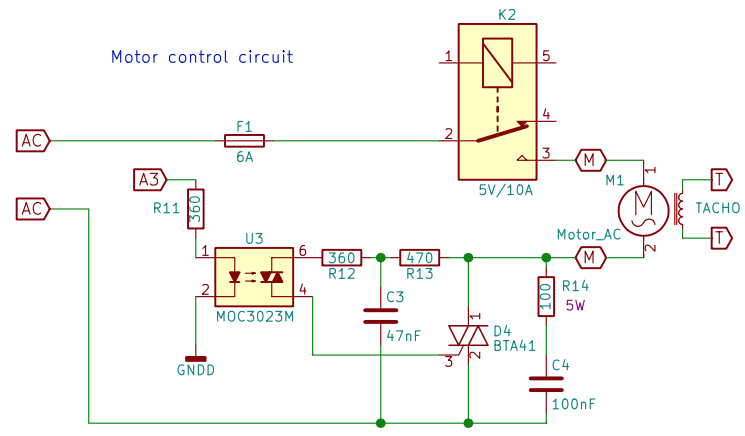
Tex A. schrieb: > dass der > Gleichrichter dem Tyristor das schalten im Nullpunkt bei > Phasenverschiebung ermöglicht. Welcher Thyristor? In beiden Schaltungen sind Triacs. Der Gleichrichter links ist deswegen nötig, weil das ein DC Motor ist, mögl. mit Permanentmagneten und Kollektor. So einen Motor hatte ich auch mal in einer Waschmaschine. Die Schaltung rechts ist in der Wahl des Zündzeitpunktes völlig frei und die Zündüng hängt nur vom MC ab. Links sieht man ja von der Zündschaltung nix.
Sorry, mir erschließt sich die Schaltung links nicht. Wo/wie sollte hier bitte der TRIAC den Motor steuern? Imho fehlt da also etwas und/oder ist schlicht falsch.
> Imho fehlt da also etwas und/oder ist schlicht falsch.
Nein, du musst flexibler denken. .-)
Der Gleichrichter ist nicht fuer die Schaltung, der ist fuer
den Motor.
Vanye
Tex A. schrieb: > Warum kann die russische Schaltung darauf verzichten? Die russische Schaltung betreibt den Allstrom-Motor mit Gleichspannung, er dreht damit als Macimaldrehzahl schneller als mit Wechselspannung, und wenn es ein DC Motor mit Permanentmagnet ist muss man erst recht gleichrichten. Ob man das so will, hängt aber nicht vom IC ab, TDA1085 oder uC, sondern Einsatzzweck. Die Wabeco-Steuerung nutzt TDA1085 mit Brückengleichrichter am Motor. https://www.mikrocontroller.net/attachment/530156/Wabeco_Steuerung.pdf Dafür verwendet die russische Schaltung den MOC3023, völlig ungeignet, es braucht einen MOC3072 wenn man ihn mit einem 275V~ VDR schützen will. Der TDA1085 gibt sich jede Menge Mühe den Motor ordentlich laufen zu lassen, retrigger, PID Regelcharacteristik, und Schutz z.B. vor defektem Tacho, die man im uC erst mal nachprogrammieren müsste. Dafür kann der TDA1085 nur mit Tachogenerator und nicht mit Hallsensor arbeiten.
:
Bearbeitet durch User
Danke an alle. Matthias S. schrieb: > Der Gleichrichter > links ist deswegen nötig, weil das ein DC Motor ist, mögl. mit > Permanentmagneten und Kollektor. Ich denke, ich habe belastbare Indizien dafür, dass es in beiden Fällen ein Reihenschlußmotor ist. Michael B. schrieb: > Der TDA1085 gibt sich jede Menge Mühe den Motor ordentlich laufen zu > lassen, Ja, und mir wäre es auch lieber, er würde es tun, aber irgendwie scheitert er in letzter Zeit bei dieser Aufgabe und mir gehen die Ideen aus, warum. Alfred B. schrieb: > Imho fehlt da also etwas und/oder ist schlicht falsch. Ja, ich konzentriere mich gegenwärtig erst mal nur auf den Leistungsteil, darum habe ich den Rest erst mal weggelassen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.