Hallo, als Vorbereitung für ein mögliches Schulprojekt möchte ich einen kleinen Deltaroboter bauen. Es soll alles selber entwickelt werden, incl. der Koordinatentransformation (nur eine Richtung : Welt -> Roboter), und das auf Schulmathe-Niveau (also Standard-Geometrie im R3). Die Mechanik soll Genauigkeit im mm-Bereich leisten, und aus billigen Modellbauteilen aufgebaut werden. Aktoren sind Modellbau-Servos (16bit Auflösung). Als Gesamtaufwand denke ich so Größenordnung 100 € ohne die Servos. Die Rechentechnik soll komplett auf einem Arduino laufen. Nix neues eigentlich, alles schon mal dagewesen.... Trotzdem würden mich Tipps, Erfahrungen usw. interessieren. Ein konkrete Frage wäre z.B., wie gut oder schlecht das mit einem E-Magneten als Effektor funktioniert, weil ich keine Pneumatik für einen Sauger habe. Fühlt sich jemand angesprochen, hat sowas schon mal gemacht ?
16bit werden niemals als Position eines Modelbauservos ankommen. Typische Winkelfehler sind da eher Grad. Das skaliert dann mit deiner Mechanik hoch. Millimeter halte ich für unrealistisch. Bei einem Deltaroboter hast du ja sowieso eine von der aktuellen Position abhängige Auflösung.
Hier ein ähnliches Projekt (allerdings mit Raspi statt Arduino und anderer Kontext) im Anhang (mp4). Die Positioniergenauigkeit ist hier rund 1mm (im zentralen Arbeitsbereich besser, außen höher) mit größeren Standard-Modellbauservos. Spätere Anmerkung : Film geht hier nicht direkt, oder ? Also so : https://www.youtube.com/watch?v=gQY8KksP_1c
Reiner D. schrieb: > Ein konkrete Frage wäre z.B., wie gut oder schlecht das mit einem > E-Magneten als Effektor funktioniert Kommt wie üblich darauf an: wenn du Kunststoffteile anheben willst, geht das mit dem E-Magneten eher schlecht. > als Effektor Du meinst wohl eher einen "Aktor", denn "Effektor" kommt tendenziell eher aus der Biologie: - https://de.wikipedia.org/wiki/Effektor
Grundlagen der Robotik, TU Mittelhessen : "Effektor (auch Tool oder Hand) Bearbeitungswerkzeug am Ende des Roboterarmes, wird vom Roboter zum Werkstuck geführt. Große Vielfalt an Effektoren, wird oft vom Anwender speziell gefertigt." ..ist aber doch egal, man versteht doch, was ich meine, oder ? "Kommt wie üblich darauf an: wenn du Kunststoffteile anheben willst, geht das mit dem E-Magneten eher schlecht." Echt ? Spaß beiseite : ich will Stahlteile (kleine Scheiben) heben und aufeinanderschichten. Könnte z.B. sein, daß da der Restmagnetismus des E-Magneten Schwierigkeiten macht. Aber ich bin sicher nicht der Erste, der das probiert ...
Reiner D. schrieb: > ..ist aber doch egal, man versteht doch, was ich meine, oder ? Ja, aber bitte nicht Plenken. Ein Fragezeichen hat keine eigene Zeile verdient! > "Kommt wie üblich darauf an: wenn du Kunststoffteile anheben willst, > geht das mit dem E-Magneten eher schlecht." > Echt ? Ja, tatsächlich, meine Glaskugel ist grad beim Putzen. Evtl. hättest du ja auch einen Zugmagneten als Betätiger für einen Greifer meinen können. > Spaß beiseite : ich will Stahlteile (kleine Scheiben) heben und > aufeinanderschichten. Ich würde mir an deiner Stelle ein paar fertige derartige "Effektoren" kaufen. Die nennen sich "Haftmagnet". Denn wenn du sowas selber wickeln willst, darfst du nur ganz, ganz dünne Metallscheiben heben wollen: - https://www.magno-sphere.de/elektromagnet-elektro-haftmagnet-freie-anschluess-12-vdc-und-24-vdc_1350_3391/?ReferrerID=7 BTW: bitte nutze die Zitierfunktion: Text markieren und auf "Markierten Text zitieren" drücken. BTW2: so wie ich das sehe, geht es hier im Thread vorrangig um diesen Effektor. Es ist also derzeit ein eher mechanisches Problem, und kein digitaltechnisches?
Lothar M. schrieb: > BTW2: so wie ich das sehe, geht es hier im Thread vorrangig um diesen > Effektor. Es ist also derzeit ein eher mechanisches Problem, und kein > digitaltechnisches? Na ja, schon eher allgemein. Natürlich ist Mechanik dabei, zum Beispiel der Hinweis auf die fragliche Positioniergenauigkeit ist sehr wertvoll. Aber auch die Mathematik ist zum Beispiel Thema, hat sicher schon jemand auch selber gerechnet ohne "höhere" Mathematik.
Überleg dir auch wie du den Restmagnetismus im Kern und den Scheiben wieder los wirst. Sonnst fällt deine Scheibe nicht mehr ab, oder halten untereinander magnetisch zusammen. Eine kleine H Brücke und mit dem uC eine eine abklingende Wechselspannung aufschalten funktioniert recht gut. Sg
Klasse, danke. Mit Elektromagneten habe ich wenig Erfahrung, hatte aber sowas schon befürchtet. Also ein Wechselfeld zum Abbau. Ausschleichen mit PWM? Schon einiges gelernt : - Bei den Servos auf die Positioniergenauigkeit achten. Mal rechnen, was z.B. 0,1° über die Mechanik hochgehebelt bedeuten. - Restmagnetismus gezielt "löschen". Unklar ist mir auch die Beeinflussung der Fahrgeschwindigkeit. Einen weiten Zielpunkt durch viele kleine Schritte anzufahren erzeugt ziemliches Gezappel. Möglich wäre vielleicht, die Motorversorgung im Servo (direkt vor dem Motor) mit PWM zu takten. Wird natürlich niemals linear oder so, aber "langsam" und "normal" sollten drin sein.
Reiner D. schrieb: > Also ein Wechselfeld zum Abbau. Ausschleichen mit PWM? PWM allein gibt aber kein "Wechselfeld", sondern nur ein mehr oder weniger starkes "Gleichfeld". Du musst also eine H-Brücke geeignet ansteuern. > Möglich wäre vielleicht, die Motorversorgung im Servo (direkt vor dem > Motor) mit PWM zu takten. Das macht der Servo selber schon (und zwar in allen 4 Quadranten!), da willst du nicht noch zusätzlich mit drin rumpfuschen. Wenn, dann musst du den Servoregler komplett selber machen.
Lothar M. schrieb: > Du musst also eine H-Brücke geeignet > ansteuern. Ja klar, darum schreib' ich ja "Wechselfeld". L298N oder so ... >> Möglich wäre vielleicht, die Motorversorgung im Servo (direkt vor dem >> Motor) mit PWM zu takten. > Das macht der Servo selber schon Ich dachte, Servos arbeiten mit konstanter Drehrate (also immer der gleichen Motordrehzahl) und regeln schaltend. Interessant!
Reiner D. schrieb: > L298N oder so ... Der hat ja noch nicht mal einen Stromregler drin, das ist mal ein richtiger Zombie aus dem letzten Jahrtausend... ;-) Wenn schon, dann nimm halbwegs aktuelle Bauteile: - https://www.ti.com/compare-products/de-de/?id=2005&type=GPT&mode=alternate-gpn&partList=L293,DRV8904-Q1,DRV8231A,DRV8243-Q1,DRV8844,DRV8876&sticky=true > Ich dachte, Servos arbeiten mit konstanter Drehrate (also immer der > gleichen Motordrehzahl) und regeln schaltend. Servos haben natürlich einen PI-Regler drin, sonst wäre das Ding ja generell ungenau oder würde schwingen. Dass sich das Ding während langer Fahrt konstant dreht, hängt einfach von der Versorgungsspannung ab.
Lothar M. schrieb: > Servos haben natürlich einen PI-Regler drin, sonst wäre das Ding ja > generell ungenau oder würde schwingen. Dass sich das Ding während langer > Fahrt konstant dreht, hängt einfach von der Versorgungsspannung ab. Wenn das ein PI-Regler ist, dann müßte der bei sehr kleinen Winkeln auch langsamer drehen .. und dann eben nicht "ruckeln". Das probier' ich aus. Dann wäre die Geschwindigkeit über die Schrittweite beeinflußbar.
Reiner D. schrieb: > Wenn das ein PI-Regler ist, dann müßte der bei sehr kleinen Winkeln auch > langsamer drehen Die Logik passt nicht ganz, denn bei ganz kleinen Schrittwinkeln gibst eh' du die Geschwindigkeit vor, weil ja nur alle 10..20ms ein neuer Positionswert kommt.
Vergiss Servos. Servos bringen vielleicht ein Grad Aufloesung. Dh mit 8 Bit wird langsame Ende der Fahnenstange sein. Ja, ich hab'verschiedene Servos probiert. 16bit PWM auf das Servo im 0.8ms/2.2ms Raster. Einen Spiegel auf der Achse mit einem Laserpointer beleuchtet, und die Milimeter an der Wand gemessen. Speziell fuer Wiederholbarkeit. Die Linearitaet ist weniger wichtig, die Kann man mit einer Tabelle korrigieren. Wiederholbarkeit nicht. Hier sind Stepper angesagt, und zwar im Mikroschritt Mode. Ich selbst habe einen FLSun Q5 Drucker. Der war um die 300 Euro. Du wirst sehr lange brauchen, etwas in dieser Richtung zu bauen. Und mit Schulmathe wird's nicht reichen. Die Position zu rechnen ist eins. Irgend wann soll auch noch etwas bewegt werden, etwas PID wird auch nicht reichen, eher die Differentialgleichungen auseinander nehmen
Ok, viel gelernt zum Antrieb. Danke für die Tipps. Eine andere Frage (ich weiß, ist Mechanik, aber thematisch gehört es hierher): Wie dimensioniert man bei Deltas das Verhältnis der Armlängen (Aktiv / Passiv) ? Ich finde einfach kein Kriterium, das hier einen Ansatz bietet. Wieder : dankbar für jeden Tipp !
Wie gross, flaechig soll denn der Anfahrbereich sein ? Wieviel Fahrweg haben die Aktoren ?
Reiner D. schrieb: > Wie dimensioniert man bei Deltas das Verhältnis der Armlängen (Aktiv / > Passiv) Ich würde sagen: im Prinzip einfach so, dass man jeden Punkt erreicht, den man erreichen will. Und dafür ist der angetriebene Arm (wenn er sich nach unten und oben bewegen kann) in etwa halb so lang wie der passive Arm. Denn dann errricht man die maximale Reichweite und hat dort die maximale Kraft:
1 | M otor |
2 | a ngetriebener Arm |
3 | G elenk |
4 | p assiver Arm |
5 | E ffektor |
6 | |
7 | G |
8 | | | |
9 | a | |
10 | | | |
11 | M | M ------ |
12 | | | |
13 | p a |
14 | | | |
15 | E G ----- min |
16 | | ^ |
17 | | | |
18 | | |
19 | | Hub |
20 | | |
21 | p | |
22 | | v |
23 | E ----- max |
Wenn man sich ein paar Videos anschaut, dann kann man das leicht erkennen: - https://www.youtube.com/results?search_query=delta+robot > ich weiß, ist Mechanik Bisher war eigentlich alles nur Mechanik und ich glaube, du solltest dir tatsächlich zuerst mal dieses Thema grundsätzlich zu Ende überlegen... > Wieder : dankbar für jeden Tipp ! Bitte nicht Plenken ! Wo zur Hölle lernt man das denn überhaupt ?
Purzel H. schrieb: > Wie gross, flaechig soll denn der Anfahrbereich sein ? Wieviel Fahrweg > haben die Aktoren ? Im Kern alles offen. Ich dachte an Armlängen von zusammen rund 20..30 cm, das sieht man gut in einem Klassenraum und ist doch nicht zu sperrig. Welche Aktoren da dran sollen, wird entschieden, wenn klar wird, welche Genauigkeit machbar ist. Damit wird dann erst eine konkrete Aufgabe definiert. Jedenfalls keine Sauger, sondern entweder Magnet oder ähnlich.
Lothar M. schrieb: >> Wieder : dankbar für jeden Tipp ! > Bitte nicht Plenken Sorry, ich habe mir das im Lauf der Jahre wegen der (meiner Meinung nach) besseren Lesbarkeit angewöhnt. Aber es ist euer Forum : ich werde versuchen, es zu vermeiden! Das Armverhältnis 1:2 ist an vielen Bildern oder Filmen in etwa zu sehen. Mir fehlt bloß eine wirklich zündende Erklärung, Rechnung. Im gestreckten Fall ist das einleuchtend, aber in Zwischenwinkeln erzeugt das Armverhältnis sehr unterschiedliche Anlenkwinkel, die dann auch in die Fehlerfortpflanzung der Mechanikspiele eingehen. Und das ist "aus dem Ärmel" kaum zu überblicken. Ich hatte gehofft, jemand kennt hier eine Quelle, vielleicht was wissenschaftliches aus einem Lehrbuch oder so. Ich hatte selber mal Robotik im Studium, aber da wurden nur Knickarme behandelt, und da ist ja alles ganz anders (und auf Schulniveau sowieso nicht rechenbar). Läuft wohl drauf raus, die (abgeschauten) 1:2 zu übernehmen. Wenn's Fanuc und Co. so machen, kann es nicht sehr falsch sein ;-) Ich schätze, am Ende ist das ein Kompromiss aus Fehlerverhalten, Kraft und möglichem Arbeitsraum, der nur für spezielle Arbeitsraum-Konfigurationen anders optimiert werden muß.
Angehängte Dateien:
-

DIY-Delta-Robot.png
260 KB
Vielleicht kannst du dich an den DIY-Delta-Robotern orientieren, statt an den professionellen. Bei den Selbstbaurobotern sieht man die Schwierigkeiten leichter und was mit günstigen Teilen möglich ist. https://www.youtube.com/watch?v=dx5dYdQ7NDo
Hier einer mit relativ großen Servos: https://www.youtube.com/watch?v=bfRIsF71XhE Und hier noch einen Aufbau mit mehreren Deltaplattformen und einige Gedanken zu den Geschwindigkeiten der Servos. Wenn man genau hinschaut, sieht man in den Videos die typischen Schwingungsprobleme, die durch positionsgeregelte Servos entstehen. https://www.youtube.com/watch?v=z28Bp8uFvVQ
Normalerweise sind bei einem Deltaroboter, zB FLSun, alle Arme aktiv. Man hat dann 3 Arme mit 3 Antrieben.
Purzel H. schrieb: > Normalerweise sind bei einem Deltaroboter ... alle Arme aktiv. Ich verstehe es so: - aktiv = vom Motor angetrieben - passiv = über Gelenk am angetriebenen Arm montiert
Christoph M. schrieb: > Hier einer mit relativ großen Servos: > https://www.youtube.com/watch?v=bfRIsF71XhE Genial, der Sauger und die "Vakuumpumpe". Würde den Burschen für den Bastler-Nobelpreis vorschlagen! Der Trick bei der Mechanik mit Servos ist nicht die Verbesserung der Genauigkeit, sondern die Anwendung auf Aufgaben, die mit der geringeren Präzision zurechtkommen. Im Education-Bereich haben sich dazu z.B. speziell geformte Bauteile durchgesetzt, die Mechaniktoleranzen wieder gutmachen. Siehe : https://www.youtube.com/watch?v=gQY8KksP_1c
Reiner D. schrieb: > ie Mechanik soll Genauigkeit im mm-Bereich leisten, und aus billigen > Modellbauteilen aufgebaut werden. Finde den Fehler! Wenn du dich informieren möchtest, dann wäre Roboternetz das richtige für dich. Da sind viele der Fragen diskutiert und gelöst. Auch welche Bauteile man so nehmen kann und welche nicht.
Angehängte Dateien:
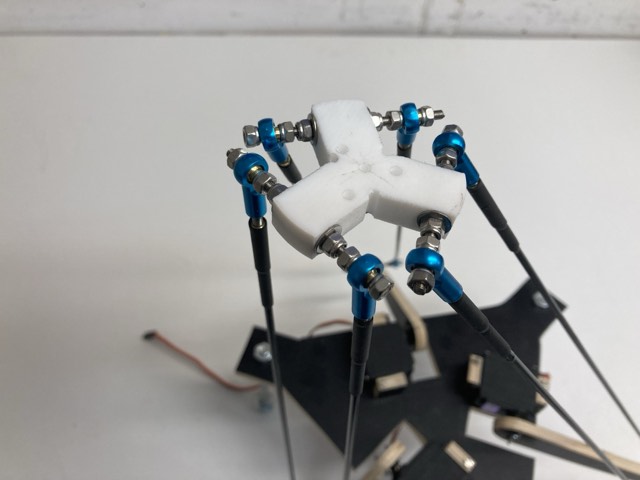
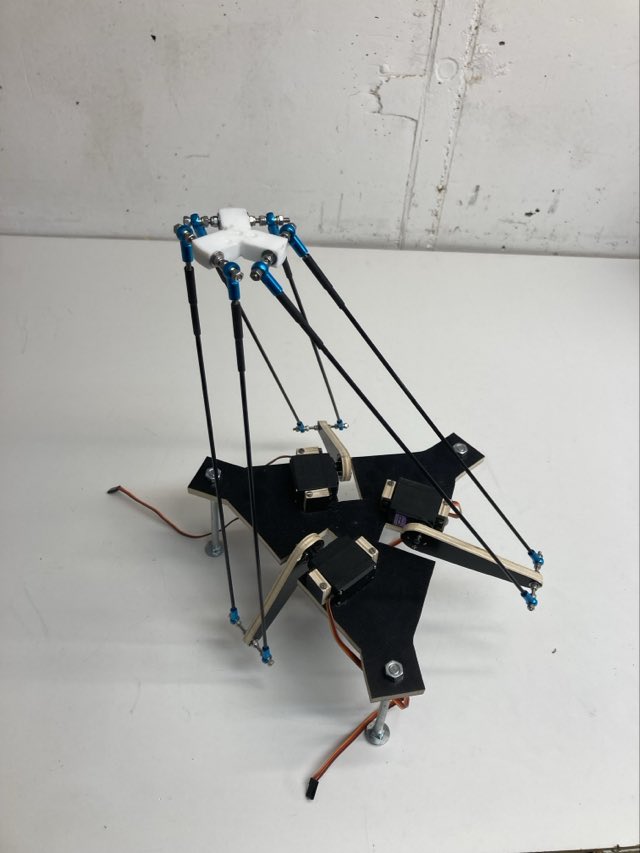
Alles gut. Die Mechanik tut was sie soll. Aktuell ist die Genauigkeit recht schwach (maximal geschätzt ca. +/- 3mm), weil die passiven Arme viel zu lang sind. Wollte man damit wirklich etwas arbeiten, mußten diese ca. um die Hälfte kürzer sein, was natürlich den Arbeitsraum kleiner machen würde. Die Sichtbarkeit der Bewegung würde darunter leiden. Es geht hier aber nicht um irgendwelche mechanischen Aufgaben, die Mechanik soll nur zeigen, daß die Transformationsmathematik wirklich funktioniert. Eine prinzipielle Schwäche der Servoansteuerung ist natürlich, daß man wegen der fehlenden Rückmeldung des Servos nicht weiß, wann eine Bewegung fertig ist. Man müßte dazun das Servos anzapfen, oder zur Not die Bewegungsdauer über den maximalen Bewegungswinkel abschätzen. Aber : wie oben gesagt geht wes darum hier ja nicht. Danke für die vielen interessanten Beiträge !
Reiner D. schrieb: > Aktuell ist die Genauigkeit recht schwach > (maximal geschätzt ca. +/- 3mm), weil die passiven Arme viel zu lang > sind und weil die Art der Verschraubung nicht so super intelligent ist ;-)
Wird sowas nicht auch "Tripod" genannt? Ich kenne die Dinger sonst auch mit mehr Beinen als "Hexapod".
Beitrag #7829946 wurde von einem Moderator gelöscht.
Ich finde das Projekt sehr spannend und möchte ein paar Gedanken dazu teilen. 1. Mechanische Genauigkeit & Servos Die Frage nach der erreichbaren Präzision mit Modellbau-Servos ist durchaus berechtigt. Servos mit Standard-PWM-Ansteuerung haben in der Regel eine Auflösung von 0,1–1° pro Schritt, was sich insbesondere bei langen Hebeln auf mehrere Millimeter Fehler am Greifer auswirken kann. Eine mögliche Lösung wäre der Einsatz von digitalen Servos mit höherer Präzision oder von Closed-Loop-Servos mit Encoder-Feedback, um die Position besser zu kontrollieren. Alternativ könnte eine Getriebeuntersetzung helfen, die Auflösung zu verbessern. 2. Elektromagnet als Greifer – Sinnvoll oder nicht? Die Idee, einen Elektromagneten als Greifer zu verwenden, hängt stark von der Anwendung ab. Falls vor allem kleine Stahlteile bewegt werden sollen, kann das eine einfache Lösung sein. Allerdings sollte man einige Punkte beachten: Restmagnetismus: Manche Elektromagnete hinterlassen einen Restmagnetismus, der dazu führen kann, dass Werkstücke beim Loslassen noch leicht haften. Ein Wechselstrom-Entmagnetisierungsschritt oder ein kurzes Umpolen könnte helfen, das Problem zu reduzieren. Energieverbrauch & Wärmeentwicklung: Elektromagnete brauchen kontinuierlich Strom, um ein Objekt zu halten, was zu Erwärmung führen kann. Falls das problematisch ist, wären Haftmagnete mit Federmechanismus oder mechanische Greifer eine Alternative. Materialeinschränkung: Natürlich funktioniert ein Elektromagnet nur mit ferromagnetischen Materialien. Falls verschiedene Objekte gegriffen werden sollen (z. B. Kunststoff oder Aluminium), wäre ein Vakuumgreifer oder ein mechanischer Greifer eine flexiblere Wahl. Ich selbst habe für ein ähnliches Projekt einen Elektromagnetengen genutzt: https://www.magnetmax.de/elektromagnete Dort gibt es verschiedene Varianten mit optimierten Haftkräften, und ich konnte mir einen passenden Magneten mit niedriger Restmagnetisierung auswählen. 3. Verbesserung der Positioniergenauigkeit Falls eine höhere Präzision als mit Standard-Servos nötig ist, gibt es mehrere Möglichkeiten: Vision-Systeme: Eine Kamera könnte die exakte Lage der Werkstücke erfassen und kleine Ungenauigkeiten ausgleichen. Kinematische Kalibrierung: Falls der Roboter nicht exakt positioniert, könnten Korrekturwerte hinterlegt werden, um systematische Fehler zu minimieren. Bessere Steuerung: Statt einfacher PWM-Servos könnte man auf Stepper oder Closed-Loop-Systeme umsteigen, um präzisere Bewegungen zu ermöglichen. Fazit Für ein Schulprojekt ist das ein sehr ambitioniertes Vorhaben, und ich bin gespannt, wie es weitergeht! Falls es vor allem darum geht, kleine Stahlteile schnell zu greifen und abzulegen, kann ein Elektromagnet eine praktikable Lösung sein – mit den erwähnten Einschränkungen. Falls jedoch universellere Greifmöglichkeiten gefragt sind, würde ich mir eher einen einfachen mechanischen oder pneumatischen Greifer überlegen. Freue mich auf den weiteren Verlauf des Projekts! 😊
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.