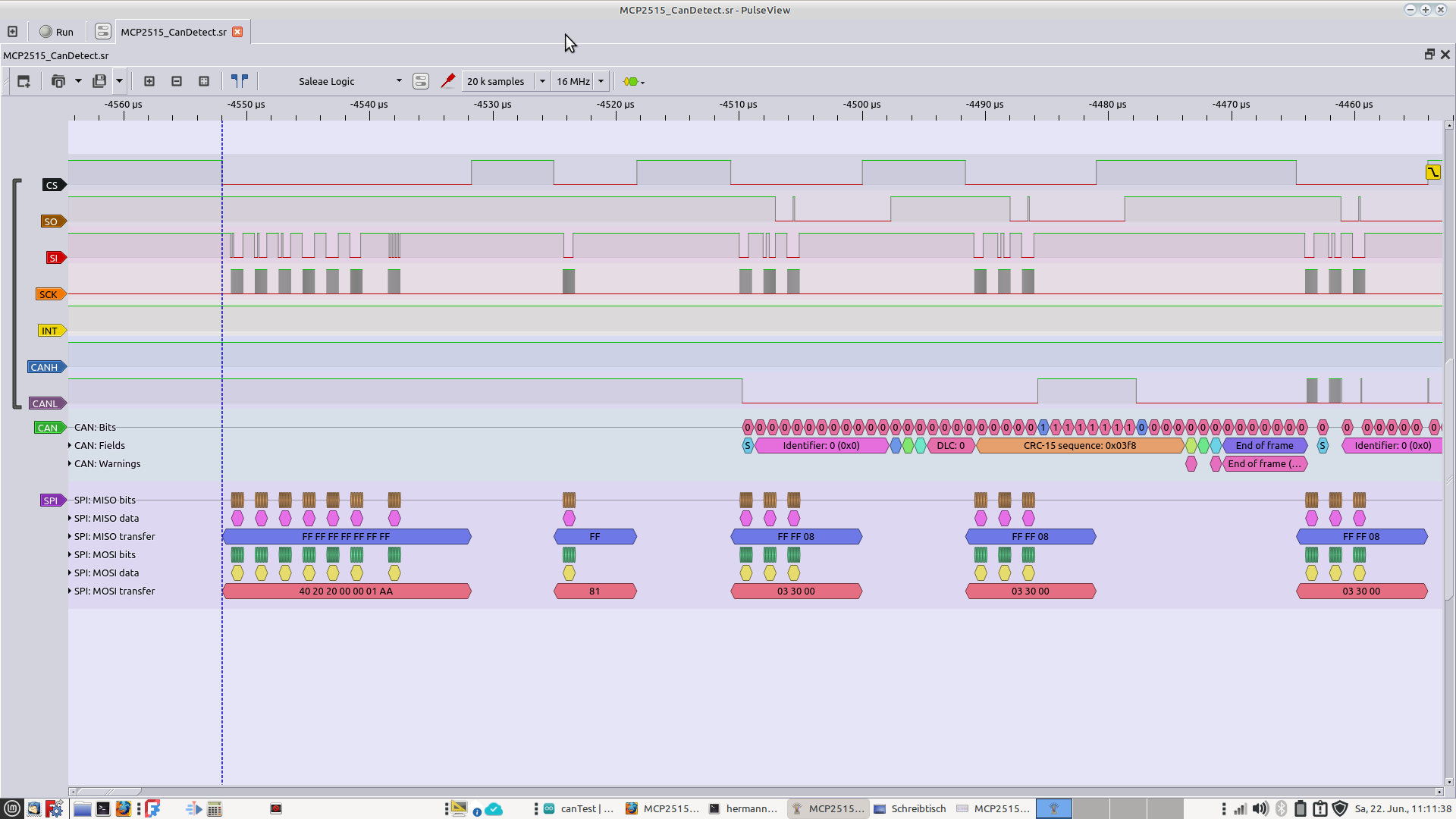
Hallo zusammen, nach einigen Tagen weiß ich nicht mehr weiter und bitte um Hilfe. Ich habe folgendes CAN-Bus-Minimalsystem aufgebaut: Node A (Sender): Arduino Nano und MCP2515-Modul. Node B (Empfänger): ESP32 DevKitC und SN65HV230-Modul Beide Seiten sind auf 125kHz initialisiert. Verbindung CANH, CANL und GND sind da. Ich habe diverse Bibliotheken ausprobiert, dann zur Eingrenzung des Problems nur Node A laufen lassen, an Stelle von Node B hängt ein weiteres MCP2515-Interface, welches nur mit Betriebsspannung versorgt wird. Die Auswertung der Fehlercodes aus der Library (https://github.com/coryjfowler/MCP_CAN_lib) hat mir gezeigt, dass der MCP immer in einen TX-Timeout läuft (Fehlercode 7). Wenn ich nicht in "loop" initialisiere, ist irgandwann kein TX-Buffer mehr frei und der Fehlercode wechselt auf 6. Das MCP-Interface ist dieses: https://42project.net/shop/module/kommunikationsmodule/spi-mcp2515-can-bus-modul-tja1050-transceiver-shield-5v-33v-fuer-arduino-und-pi/ Ich habe folgendes schon getestet/probiert: * "nacktes" MCP2515-Modul statt Node B * Spannungsversorgung über Labornetzteil statt über den USB * CANH/CANL vertauscht * verschiedene CAN-Bitraten ausprobiert * SPI_Clock mit 16MHz statt 8MHz ausprobiert Alles hat keinen Erfolg gebracht. Jetzt weiß ich nicht mehr weiter :-( Besten Dank im Voraus für jeden konstruktiven Tipp! Hermann
Angehängte Dateien:
-

MCP2515_CAN_Screenshot.png
160 KB
Εrnst B. schrieb: > Kann deine CAN-Library den loopback-Modus aktivieren, für einen Test mit > dem MCP2515 alleine? Ja, sorry, das hatte ich vergessen. Ich hatte mit mehreren Libs den Loopback-Modus probiert, der hat immer ohne Fehlermeldungen funktioniert.
Florian L. schrieb: > Can Bus ist terminiert? Ja, auch das. Ich hatte es auch mal mit einseitiger Terminierung und ganz ohne versucht, macht keinen Unterschied. Außerdem hatte ich auch die beiden CAN-Platinen mal getauscht, auch das hat zu keiner Änderung geführt.
Beitrag #7689613 wurde von einem Moderator gelöscht.
Wenn der Sender von niemandem ein ACK bekommt, dann probiert er ewig weiter, den ersten Frame zu senden. Den MCP2515 nur mit Spannung zu versorgen ist glaube ich nicht ausreichend, um ihn zum Senden von ACKs zu bringen. Da müsste ich aber noch einmal ins Datenblatt schauen. Zur Diagnose solltest du den LA an den RXD-Ausgang von einem der Transceiver (TJA1050 oder SN65HV230) hängen. LG, Sebastian
Sebastian W. schrieb: > Zur Diagnose solltest du den LA an den RXD-Ausgang von einem der > Transceiver (TJA1050 oder SN65HV230) hängen. Danke für den Tipp, werde ich am frühen Abend machen. Muss jetzt erst andere Dinge erledigen...
Ein Bus mit nur einem CAN-Node funktioniert nicht. Es brauch immer mindestens 2. Wenn ein Node ein CAN-Frame raussendet und dieser nicht von einem anderen Node acknowledged (ACK) wird kommt es zu den von dir beschreibenden TX-Fehler. Jeder andere CAN-Node acknowledged jedes Frame das er bekommt, auch wenn es nicht für sich bestimmt ist.
Sebastian W. schrieb: > Den MCP2515 nur mit Spannung zu versorgen ist glaube ich nicht > ausreichend, um ihn zum Senden von ACKs zu bringen. Da müsste ich aber > noch einmal ins Datenblatt schauen. Nur Spannung anzulegen st nicht ausreichend. Nach dem Power-On ist der MCP2515 im Configuration Mode, und nur im Normal Mode verschickt er ACKs. Ist irgendwie auch klar, woher soll er auch die Bitrate kennen ... LG, Sebastian
Christian schrieb: > Jeder andere CAN-Node acknowledged jedes Frame das er bekommt, auch wenn > es nicht für sich bestimmt ist. Man hätte auch ohne "Denglisch" schreiben können: Jeder CAN-Knoten bestätigt jedes Frame, dass er bekommt, auch wenn es nicht für ihn bestimmt ist. SCNR
Ja tut mir leid, natürlich muss der Nachrichten-Rahmen vom ersten Kontroller-Bereichs-Netzwerk-Konten von einem anderen Knoten bestätigt werden, damit der ursprüngliche Konten die erfolgreiche Versendung des Rahmens erkennt.
Hallo, danke für die Unterstützung. Ich habe meinen "Node A" jetzt nochmal als Empfänger aufgebaut (sozusagen Node Arx"), und es funktioniert. Morgen muss ich dann mal sehen, was dem Node B (ESP32 mit SN65HV230) fehlt... Nochmals danke und erstmal gute Nacht.
Hermann G. schrieb: > Die Auswertung der Fehlercodes aus der Library > (https://github.com/coryjfowler/MCP_CAN_lib) hat mir gezeigt, dass der > MCP immer in einen TX-Timeout läuft (Fehlercode 7). Die Beispiele arbeiten mit 500kbs Du nutzt 125kbps Aus der Lib:
1 | #define TIMEOUTVALUE 2500 /* In Microseconds, May need changed depending on application and baud rate */ |
alles ohne Gewähr
Angehängte Dateien:
-

MCP2515.png
19 KB

Weiß jemand ob der Reset Pin floaten darf? Laut Datenblatt reicht ein Reset via SPI command, ich habe den Pin daher nicht beschaltet. > The MCP2515 differentiates between two kinds of Resets: > 1. Hardware Reset – Low on R̅E̅S̅E̅T̅ pin. > 2. SPI Reset – Reset via SPI command. > > Both of these Resets are functionally equivalent. It is important to > provide one of these two Resets after power-up to ensure that the logic > and registers are in their default state. A hardware Reset can be > achieved automatically by placing an RC on the R̅E̅S̅E̅T̅ pin (see > Figure 9-1). The values must be such that the device is held in Reset > for a minimum of 2 μs after Vdd reaches the operating voltage, as > indicated in the electrical specification (t RL). Ich hab diesen Fork gefunden aber der scheint älter zu sein. Läuft der ESP32 mit der Lib von autowp bei Dir? https://github.com/dedalqq/esp32-mcp2515
:
Bearbeitet durch User
Alexander schrieb: > Weiß jemand ob der Reset Pin floaten darf? Da im Datenblatt nirgendwo von einem internen Pullup die Rede ist, würde ich nicht davon ausgehen dass einer vorhanden ist. Der Pin muss also im unbenutzten Fall dauerhaft auf High-Pegel gelegt werden. Aber: Dein ursprünglicher Beitrag ist mehr als 6 Monate alt.
Angehängte Dateien:
-

Unbenannt.JPG
82 KB

Hi, ich würde den /RESET-Pin nicht floaten lassen. siehe Anhang. Runout
Danke. Reicht da ein Klecks Lot oder muss es ein Widerstand sein? edit: Hat sich erledigt, ich messe 10k also entweder ist das ein interner oder ich hatte schon einen drauf gelötet.
:
Bearbeitet durch User
Kleiner Tip. Das Softwarereset dauert DEUTLICH länger als die 2us im Datenblatt! Da hab ich mal fast 2 Tage dran gesucht! Das Projekt vom Krativen Chaos lief vor über 10 Jahren mal problemlos in einem Testaufbau mit 16 MHz und 10us. Vor ein paar Monaten mit 10 MHz nicht mehr! Lösung. Das Delay für das Softwarereset auf 1ms hochsetzen und gut. Vermutlich reichen auch 100us, hab ich nicht getestet.
1 | bool mcp2515_init(void) { |
2 | |
3 | uint8_t tmp; |
4 | |
5 | // init IOs
|
6 | SET(MCP2515_CS); |
7 | SET_OUTPUT(MCP2515_CS); |
8 | |
9 | RESET(P_SCK); |
10 | RESET(P_MOSI); |
11 | RESET(P_MISO); |
12 | |
13 | SET_OUTPUT(P_SCK); |
14 | SET_OUTPUT(P_MOSI); |
15 | SET_INPUT(P_MISO); |
16 | |
17 | SET_INPUT(MCP2515_INT); |
18 | SET(MCP2515_INT); // internal pull up, why? |
19 | |
20 | // init SPI master interface, SPI prescaler /4
|
21 | SPCR = (1<<SPE) | (1<<MSTR); |
22 | SPSR = 0; |
23 | |
24 | // reset MCP2515 by software reset
|
25 | // After this it is in configuration mode
|
26 | RESET(MCP2515_CS); |
27 | spi_io(SPI_RESET); |
28 | SET(MCP2515_CS); |
29 | |
30 | // wait a little bit until the MCP2515 has restarted
|
31 | // attention! internal reset time is MUCH longer than 2us minimum pulse width of data sheet!
|
32 | _delay_ms(1); |
33 | |
34 | // load CNF1..3 register
|
35 | tmp = ((CFG_SJW & 0x3)<<6) | (CFG_BRP & 0x3F); |
36 | mcp2515_write_register(CNF1, tmp); |
37 | mcp2515_write_register(CNF2, ((1<<BTLMODE) | ((CFG_PHSEG1 & 0x7)<<3) | (CFG_PRSEG & 0x7)) ); |
38 | mcp2515_write_register(CNF3, (CFG_PHSEG2 & 0x7)); |
39 | |
40 | // activate interrupts
|
41 | mcp2515_write_register(CANINTE, (1<<RX1IE)|(1<<RX0IE)); |
42 | |
43 | // test if we could read back the value => is the chip accessible?
|
44 | if (mcp2515_read_register(CNF1) != tmp ) { |
45 | return false; |
46 | }
|
47 | |
48 | // deactivate the RXnBF Pins (High Impedance State)
|
49 | mcp2515_write_register(BFPCTRL, 0); |
50 | |
51 | // set TXnRTS as normal inputs
|
52 | mcp2515_write_register(TXRTSCTRL, 0); |
53 | |
54 | // turn off filters => receive any message
|
55 | mcp2515_write_register(RXB0CTRL, (1<<RXM1)|(1<<RXM0)); |
56 | mcp2515_write_register(RXB1CTRL, (1<<RXM1)|(1<<RXM0)); |
57 | |
58 | // reset device to normal mode
|
59 | mcp2515_write_register(CANCTRL, 0); |
60 | |
61 | return true; |
62 | }
|
:
Bearbeitet durch User
Alexander schrieb: > Weiß jemand ob der Reset Pin floaten darf? Laut Datenblatt reicht ein > Reset via SPI command, ich habe den Pin daher nicht beschaltet. Laut Datenblatt wird bei Low am Reset-Pin ein Reset ausgelöst. Bei einem unbeschalteten Pin hast du KEINERLEI Kontrolle über den Pegel. Es wäre nicht einmal garantiert, dass sich der Pegel im erlaubten Bereich entsprechend Tabelle 13-1 befindet (entweder zwischen VSS und 0.15*VDD ODER zwischen 0.85*VDD und VDD). Nicht ohne Grund ist im Datenblatt in der Beispielkonfiguration für den Reset-Pin (Fig. 9-1) der Widerstand R als Pull-Up geschaltet. https://ww1.microchip.com/downloads/en/DeviceDoc/MCP2515-Stand-Alone-CAN-Controller-with-SPI-20001801J.pdf
:
Bearbeitet durch User
@Falk B Aus welcher Biblothek stammt der Code? Aus (https://github.com/coryjfowler/MCP_CAN_lib) ist er jedenfalls nicht.
Jörg schrieb: > Aus welcher Biblothek stammt der Code? Vom Kreativen Chaos. http://www.kreatives-chaos.com/artikel/can-testboard Hab ich geringfügig aufgeräumt und verbessert. Siehe Anhang.
An den MCP2515 Interrupt Pin gehört auch ein Pull-up, dann wird Falling Edge erkannt. Das delay(1) nach dem Reset hab ich ebenfalls eingefügt.
Alexander schrieb: > An den MCP2515 Interrupt Pin gehört auch ein Pull-up, dann wird Falling > Edge erkannt. Falsch! Der Pin ist ein Push-Pull Ausgang, KEIN Open Drain! Ausgangsstufen Logik-ICs > Das delay(1) nach dem Reset hab ich ebenfalls eingefügt. Keine Ahnung was DIESE Funktion macht, aber es reicht ein _delay_ms(1), das ist 1ms.
Falk B. schrieb: > Falsch! Der Pin ist ein Push-Pull Ausgang, KEIN Open Drain! Ist das wirklich so? Ich habe jedenfalls Probleme mit dem INT und weiß nicht ob es ein Hardware- oder Software Problem ist. Tagelang geht alles, dann flashe ich den ESP32 neu (ohne Änderungen am Code) und fang wieder mit der Fehlersuche von vorne an. Jedes INT wird erfasst und gelöscht, wenn keine CAN Nachrichten mehr rein kommen sollte doch INT irgendwann Ruhe geben. LED geht aber nicht aus. Oder kann es sein dass der MCP2515 auch INT sendet ohne CAN Traffic? Hier der Code https://www.mikrocontroller.net/topic/goto_post/7878186 Falk B. schrieb: > Keine Ahnung was DIESE Funktion macht, aber es reicht ein _delay_ms(1), > das ist 1ms. Auch hier benötige ich mal qualifizierte Hilfe eines ESP32 Freaks https://www.mikrocontroller.net/topic/goto_post/7926303
Alexander schrieb: > Ist das wirklich so? Ich habe jedenfalls Probleme mit dem INT und weiß > nicht ob es ein Hardware- oder Software Problem ist. Einfache Lösung: Oszi / (10€-)LogicAnalyzer an den Pin hängen und gucken, ob da was toggelt.
Alexander schrieb: > Falk B. schrieb: >> Falsch! Der Pin ist ein Push-Pull Ausgang, KEIN Open Drain! > > Ist das wirklich so? Komische Frage. Hast du im Datenblatt einmal bis zum Hardwareteil Kapitel 13 Electrical Characteristics durchgescrollt? Dort ist in Tabelle 13-1 für den INT-Pin doch ganz klar angegeben, welchen Pegel er bei High liefert (V_OH). Ein Open Drain Ausgang KANN naturgemäß keinen H-Pegel liefert.
:
Bearbeitet durch User
Er liefert ja aber einen Active Low Pegel, daher habe ich nicht so weit gescrollt. So oder so sollte doch aber ein Pull-up nicht schaden? > When an interrupt occurs, the I̅N̅T̅ pin is driven low by the MCP2515 > and will remain low until the interrupt is cleared by the MCU. Rahul D. schrieb: > Einfache Lösung: > Oszi / (10€-)LogicAnalyzer an den Pin hängen und gucken, ob da was > toggelt. Das werde ich gleich mal testen, heut ist es nicht so warm im Auto.
:
Bearbeitet durch User
Angehängte Dateien:
-

IMG_20250821_125328.jpg
340 KB

Lustigerweise geht es jetzt wieder. Ich hab nix verändert weder Hardware noch Software. Habe zwar keine Ahnung mit welcher Frequenz, da ich nicht die richtige Einstellung finde, aber man sieht der INT wird zu unterschiedlichen Zeitpunkten abgeholt und ordnungsgemäß HIGH gesetzt. Bei fehlendem Traffic bleibt er HIGH und alles schaltet nach 10 Sekunden ab. Beim Abschalten geht INT mangels Stromversorgung wieder LOW.
Alexander schrieb: > Lustigerweise geht es jetzt wieder. Was ist an Fehlern, die von selbst verschwinden bitte lustig. Wenn sie dann bei nächster Gelegenheit genauso von selbst wieder auftreten, findest du das dann auch so lustig? Irgendeinen Grund muss das Fehlverhalten haben und den gilt es zu finden.
:
Bearbeitet durch User
Ich habe evtl. noch einen möglichen Fehler im Programm gefunden, ist zwar sehr unwahrscheinlich aber dennoch ein Restrisiko gewesen. Ein Timer wird von INT aller 100 ms zurückgesetzt. Unterbleibt das, wird nach 10 Sekunden Timeout der MCP2515 abgeschaltet. Es liefen der Timer für die 10 sek und der Timer für die 100 ms gegeneinander, könnte theoretisch immer wieder ungünstig aufeinander getroffen sein. Ich hab nun noch eine 100 ms Sperre drin in der kein INT reingrätschen kann, die 100 ms werden nun bei 10 sek Timeout ebenfalls noch mal zurückgesetzt. Dass es das tatsächlich war ist aber statistisch unwahrscheinlich. Ansonsten bleibt eigentlich nur noch die Erklärung unerwünschte Kurzschlüsse des INT gegen Masse, die mein DSO138 nicht anzeigt, oder Kabelunterbrechung/ Wackelkontakt der Dupont Jumper Kabel (kein stabiles HIGH) die ich nicht gesehen habe weil ich mit dem Oszi direkt am CAN Modul dran war. Ein Pull-up direkt am ESP32 sollte das Problem beheben. ChatGPT hatte übrigens ungefragt Open Drain in den Raum geworfen, der Irrtum muss ja irgendwo herkommen. > Zusätzliche Härtung möglich (optional, falls Du ganz sichergehen > willst): > > - Interrupt vor Abschalten deaktivieren: detachInterrupt(INTx); direkt > nach dem Commit im Shutdown-Pfad. > > - Pull-Up prüfen (MCP2515 INT ist Open-Drain, aktiv LOW): sauberer > Pull-Up vermeidet Geklapper im Brown-Out. Ganz so komisch scheint die Frage dann doch nicht zu sein, wenn jemand einen eigenen Thread dafür auf macht. Beitrag "MCP2515 Interrupt-Pin"
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.