Hallo zusammen, wollte mal fragen, ob hier schon jemand mit einem simplen nicht zu teuren Sensor eine Abstandsmessung für PKWs realisiert hat. Ich möchte gerne, während der Fahrt den Abstand zum vorderen Fahrzeug selber messen. Hat jemand ne Idee wie man das umsetzen kann? Da die Distanz auch größere 30m sein kann, habe ich bisher nur Radar Sensor gefunden. Kennt einer ein Produkt, was man gut mit einem ESP oder Arduino nutzen kann? Vielleicht hat ja jemand sowas schon mal realisert? Danke. Gruß kami
> Vielleicht hat ja jemand sowas schon mal realisert? Ja, hab ich. Gehoert zu den komplexeren Dingen. So komplex das du dir das vermutlich nicht vorstellen kannst. > simplen nicht zu teuren Sensor Daher kann ich dir versichern das dies in simpel und billig nicht moeglich ist. Beachte was du fuer einen Oeffnungswinkel brauchst, was dies fuer die Frequenzen und die Antenne bedeutet und das du trotzdem noch viele Stoerer im Spectrum hast. Also Software vom feinsten dahinter... Deshalb nimmt die Polizei Laserpistolen. .-) Vanye
Von Bosch gibt es Radarsensoren für den Ralley-/Rennsport, die u.a. Entfernung und Geschwindigkeit von erkannten Objekten liefern. Wenn man weiß wie kann man diese Daten auch aus den teilweise sehr ähnlichen Bosch Radarsensoren herausbekommen, wie sie in einigen PKW Modellen verbaut sind.
Mhh, also keine Aussicht auf einfach Umsetzung? Dachte das wäre Standardhardware. Hat ja fast jeder neuere Wagen drin. Gruß kami
http://www.bosch-motorsport.de/content/downloads/Raceparts/en-GB/66057227112386571.html Fertig kaufen?
Moin.. Nimm lieber so was. Das ist bezahlbar und funktioniert auf Anhieb... https://www.ebay.de/itm/374625047247?itmmeta=01J3QCRD1MFKT3TP8B1VM1GSFD&hash=item57396492cf:g:jScAAOSwSlpkNnDI&itmprp=enc%3AAQAJAAAA8ByO2fMU%2Bh%2B0TVKr14D8cABFp62EyvX8KGfh%2FZJ5ba%2FuZyUzoq4SRkMa7swGvrJAqZo80XVjg%2Fq3nNg3KUmdeLVNxG9XIFx3eqAk0epxjPZYrJjr3c3o7CYb4ToSxLxCqPQm8qackXuBPkhd%2BktvVBebwXSX13DopefwK8D5p0GGsYEeCaOmmqKDQQAgug2z0ZdjYGopCINpgvdyvUxZafNkl%2FWL0IYNR8X0C4YlM4WxDszQCABAdwcUerKCyUS6r070JFXC3cPYlTM%2FWJn1Dcz32m19z0cl0JO76HpDmaGMEmA9P5PFIs3HHZTPxAJ07Q%3D%3D%7Ctkp%3ABk9SR_zQ4eydZA Gruß mastermixer
Clemens S. schrieb: > http://www.bosch-motorsport.de/content/downloads/Raceparts/en-GB/66057227112386571.html > > Fertig kaufen? ...Preise im Netz um 5 kEuronen... Wobei es auf einem Versuch ankommen könnte, einen ggfs. ähnlichen gebrauchten KFZ Sensor CAN seitig zu belauschen... Ansonsten macht man den Aufwand mit einer relativ schmalen z.B. dielektrischen Linsenantenne vor einem ggfs. Fertig gehäustem FMCW Frontend und die zugehörige Signalverarbeitung nicht "mal eben". Und es ist dann ein gewaltiger Unterschied - ob man nur eine FFT mit leichter Filterung und Maximalwertbestimmung über die FMCW Radarmodul ZF Daten macht -- oder ein Tracking von einem guten Dutzend Zielen mit Klassifizierung über Signalhistorie, Trajektorie - Geschwindigkeit, Winkel und Rückstreuquerschnitt - was es sein könnte .. Problematisch bei Radar ist der oft Einfallswinkelabhängige Rückstreuquerschnitt der Ziele. Eine zusammengeknüllte Coladose auf der Fahrbahn wird zum gefühlten Cornerreflektor mit dem Rückstreuquerschnitt eines Öltankers, währenddessen ein Mensch oder rundgelutschtes Auto ab und an unsichtbar wird... Falls es einigermaßen bezahlbare evalkits oder Einzelsensoren geben sollte - bin ich aber auch neugierig.
Stefan S. schrieb: > Hat jemand ne Idee wie man das umsetzen kann? TI bietet da einiges an https://www.ti.com/sensors/mmwave-radar/automotive/overview.html M. P. schrieb: > Das ist bezahlbar und funktioniert auf Anhieb... > > https://www.ebay.de/itm/374625047247? > <mehrseitiger Link> Deine Familiengeschichte interessiert allenfalls ebay. Reicht nicht ein einfacher Link auf das Angebot? https://www.ebay.de/itm/374625047247
:
Bearbeitet durch User
Hi, danke schon mal für die Rückmeldung. Also 5T€ ist mir der Spaß auch nicht wert, aber die Ebay Lösung würde okay sein. Nur wie komme ich da an verwertbare Daten für einen Arduino? Gibts dort einen TTL Ausgang, etc? Gruß kami
Stefan S. schrieb: > Gibts dort einen TTL Ausgang, etc? Suche nach Entfernungsmessern mit einer seriellen Schnittstelle. Der Sensor aus dem verlinkten Ebay Angebot ist allerdings kein Radarsensor, sondern ein Laserentfernungsmesser.
Stefan S. schrieb: > Gibts dort einen TTL Ausgang, > etc? Natürlich nicht. Du wirst schon etwas Eigeninitiative aufbringen müssen, um Daten da rauszuholen. Oder du nimmst etwas einfacheres: https://www.ebay.de/itm/174994638118 Da musst du nur das LCD anzapfen.
Stefan S. schrieb: > ... die Ebay Lösung würde okay sein. Die arbeitet mit 2 x AAA Batterien. Wie die wohl 500 m schaffen will?
> einem simplen nicht zu > teuren Sensor eine Abstandsmessung für PKWs realisiert hat. > > Hat jemand ne Idee wie man das umsetzen kann? > > Da die Distanz auch größere 30m sein kann, habe ich bisher nur Radar > Sensor gefunden. Die Probleme der Pazifistengeneration, die nie Entfernungsschätzen beim Wehrdienst geübt hat, bei der Fahrschule war IMHO Abstabdsschätzen auch ein Thema. Bei größeren Strecken zählt man die im Abstand von 50m aufgestellten Begrenzungssäulen, bei kleineren die Spurbegrenzungsstreifen. Kann man natürlich auch mit Kamera, Massstab bekannter Breite und Strahlensatz machen, gibt es sicher eine App dafür; Fahrzeuge dürfen in .de nicht breiter als 2,5 m sein, der Golf ist je nach generation zwischen 1,61 und 1,79 m. Aber Handy am Steuer lenkt ab, besser man übt sich im Schätzen ohne Hilfsmittel, auf den Meter genau brauchen es eh nur die "Drängler" die juristisch gegen Ordnungsgeld wegen Unterschreitung Mindestabstand vorgehen. https://www.bussgeldkatalog.org/mindestabstand/
:
Bearbeitet durch User
Wie Vayne schon sagte, das Thema ist ultrakomplex. Nach meinem Kenntnisstand werden die Impulse in verschiedene Richtungen gesendet, die sind jeweils getaggt und müssen vom Empfänger auch wieder zugeordnet werden. Dazu musst Du von den zahlreichen Echos Du die in Frage kommenden bewegten Objekte herausfilten, damit Entgegenkommer, Leitplanken, Kanaldeckel, Fahrradfahrer, Verkehrszeichen, Coladosen etc. pp. NICHT einfließen. Dazu das alles mit Lenkwinkel, Geschwindigkeit usw. verrechnen, am besten noch optional mit den Daten aus der Kamera und weiteren Daten aus dem Gesamtsystem. Das Vorhaben ist aussichtslos.
:
Bearbeitet durch User
Angehängte Dateien:
-

Bosch_Radar_Gen_5.JPG
100 KB
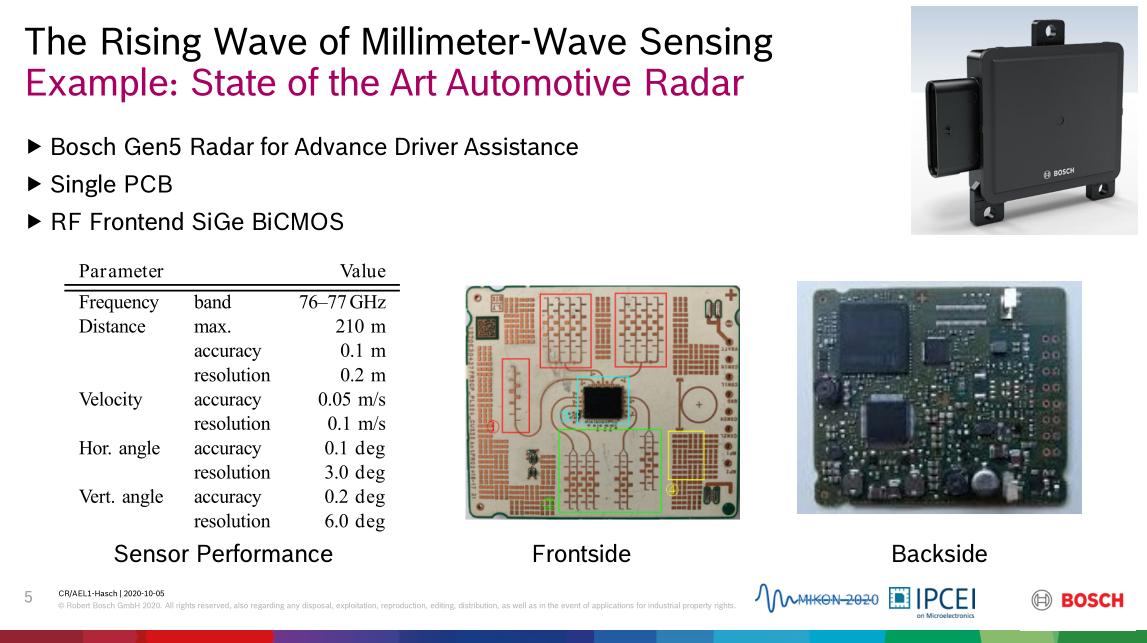
Bosch verwendet wohl FMCW im Bereich 76-77 GHz , die Performance sieht man auf dem Bild. Das Bild ist von hier: https://www.ipcei-me.eu/wp-content/uploads/2020/11/7-The-rising-wave-of-mm-wave-sensing-Bosch-Juergen-Hasch-.pdf
Mhh, ich sehe schon das Thema ist komplex. Was meint Ihr, wäre das für die normale Abstandsbestimmung bis 50m ganz okay? https://de.aliexpress.com/item/32793950499.html?spm=a2g0o.productlist.main.5.3e193a2c6lcXJY&algo_pvid=499f5b6e-a551-4ddb-895a-fd6d22d27a0a&algo_exp_id=499f5b6e-a551-4ddb-895a-fd6d22d27a0a-2&pdp_npi=4%40dis%21EUR%2156.16%2141.65%21%21%2159.56%2144.17%21%402103890117220056450325664ed859%2163965172215%21sea%21DE%210%21AB&curPageLogUid=7TNVWbHHAWaD&utparam-url=scene%3Asearch%7Cquery_from%3A Gruß kami
Stefan S. schrieb: > Mhh, > > ich sehe schon das Thema ist komplex. > > Was meint Ihr, wäre das für die normale Abstandsbestimmung bis 50m ganz > okay? > Link: Du brauchst nicht deine Lebensgeschichte mitsenden, hinter dem ersten .html kannst Du abschneiden. Ansonsten: Das Ding kenne ich tatsächlich, eine Lasermessung, die ca. 1..2sec braucht, bis sie einen Messwert ausgibt. Wenn es auch nur etwas wackelt gibt es einen Error. Reflektionskörper muss ab ca. 10m gut, ab ca. 20m sogar perfekt sein. Also müsstest Du alle anderen KFZ mit Reflexionsmarken ausstatten und die dann auch treffen.
Harald A. schrieb: > Stefan S. schrieb: >> Mhh, >> >> ich sehe schon das Thema ist komplex. >> >> Was meint Ihr, wäre das für die normale Abstandsbestimmung bis 50m ganz >> okay? >> > Link: Du brauchst nicht deine Lebensgeschichte mitsenden, hinter dem > ersten .html kannst Du abschneiden. > > Ansonsten: Das Ding kenne ich tatsächlich, eine Lasermessung, die ca. > 1..2sec braucht, bis sie einen Messwert ausgibt. Wenn es auch nur etwas > wackelt gibt es einen Error. Reflektionskörper muss ab ca. 10m gut, ab > ca. 20m sogar perfekt sein. Also müsstest Du alle anderen KFZ mit > Reflexionsmarken ausstatten und die dann auch treffen. Hi, danke für die Infos. Damit werde ich aber auch nicht glücklich. Ich versuche mal den Bosch aufzutreiben. @Norbert: Danke für den Tipp.
So Sensor gekauft. Ich melde mich wenn er da ist. Kannst auch selber googeln aber schon mal jemand einen guten Vorschlag für die erste Verbindung zu einem arduino und ein gutes passendes CAN Modul? Und einen ersten passenden Sketch?? Gruß kami
Ich würde die mmWave Radare von TI nehmen. Evalboard 120€, der Chip inkl. Onvoard Antennen 27€/1000St. Achte auf die AOP für Antenna in Package Varianten. Die liefern fertige Punktwolken über USB/Serial. Kannst du mir Raspberry dann interpretieren, da kommt schon was gutes raus.
Okay, danke. Die werde ich mir danach mal anschauen. Der Bosch Sensor muss nun erstmal getestet werden. Hat jemand dazu ein Handbuch gefunden in dem die Version: F02U.V02.647-01 beschrieben wird oder ist der Anschluss und die CAN Kommunikation identisch zu F02U.V02.021-01 Version? Schönes WE. Gruß kami
Harald A. schrieb: > Also müsstest Du alle anderen KFZ mit > Reflexionsmarken ausstatten und die dann auch treffen. Das mit dem Ausstatten kann man getrost vergessen. Das hat der Gesetzgeber (bis auf sehr sehr sehr alte KFZ die immer noch mit dem originalen damaligen Nummernschild ausgerüstet sind) bereits vor mehreren Jahrzehnten erledigt. Ein Test mit (am deutlichsten bei einem grünen) Laserpointer in einer ruhigen nächtlichen Seitenstrasse mit am Rand parkenden PKW zu einer Zeit wo nichts mehr los ist (sowohl um andere nicht durch blenden zu gefährden, aber vor allem auch um weit entfernte Reflexionen zu erkennen) bringt erhellendes in welcher Entfernung plötzlich noch deutlich sichtbar etwas hell grün aufblinkt wenn der Strahl auf ein Kennzeichen (oder Verkehrszeichen) trifft. Selbst wo man an "normalen" Material gar kein Auftreffen des Punktes mehr sieht strahlt es auf einmal hell zurück. Das Treffen ist natürlich weiterhin eine Bedingungen. Hängt aber natürlich von der Streuung des Senders und der Empfindlichkeit des Empfängers ab. Gruß Carsten
Carsten S. schrieb: > > Das Treffen ist natürlich weiterhin eine Bedingungen. > Hängt aber natürlich von der Streuung des Senders und der > Empfindlichkeit des Empfängers ab. Guter, aktueller Laser-Entfernungsmesser (Leica Disto): ca. 6 cm Laserpunkt bei 100 Meter Entfernung, die Messung bei dieser Entfernung dauert deutlich länger als 1 Sekunde (eher 2 bis 3 Sekunden). Viel Spaß beim Messen eines fahrenden Fahrzeugs in dieser Entfernung aus einem anderen fahrenden Fahrzeug und konstantem Anpeilen des Kennzeichens für ca. 3 Sekunden.
Ich habe mal offenbar einen Prototypen bzw. Versuchs-vor-vor-vor-Modell einer Totalmeßstation gefunden. Drehdings mit Laserdiode, 4-Fach-Empfänger-Diode (so ein riesiger Chip mit 4 Flächen in einem PIR-ähnlichen Gehäuse) und ein 19-Zoll Gehäuse voll mit toller Analogelektronik. Burr-Brown-Opamps im Metallgehäuse mit Datecodes aus den frühen 80ern und Stapel von 0,1%-Widerständen. Ich fand schon das Auslöten schwierig, weil alles doppelseitig mit langen Beinen in mehreren Dimensionen verdrahtet, um Leckströme zu vermeiden. Der Doktorand der das einst erfunden hat, ist damals bestimmt im Irrenhaus gelandet. An der Sende/Empfangseinheit war auch noch ein Prismenspiegel. Ich vermute, um den vom Ziel reflektierten Puls noch ein zweites Mal auf die Reise zu schicken. Oder gar aus mehreren Reflexionen etwas zu mitteln. Der Schütze von Trump wurde doch mit einem Golf-Entfernungsmesser gesehen, die scheint es recht günstig (und vermutlich lahm) zu geben.
:
Bearbeitet durch User
Stefan S. schrieb: > Ich möchte > gerne, während der Fahrt den Abstand zum vorderen Fahrzeug selber > messen. D.h. ein eigenes Radar-System bauen und Wellen aussenden? Schon mal darüber nachgedacht, dass solche System sicher eine Zulassung brauchen? Besonders beim KFZ-Betrieb? Warum nimmst du nicht einfach einen mobilen Entfernungsmesser?
Angehängte Dateien:
-

canbosch.JPG
26 KB
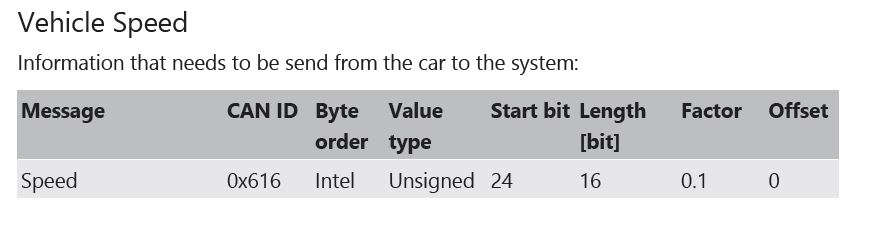
Hi zusammen, so der BOSCH Sensor ist angekommen und ich lese gerade am PC über einen USB-CAN Adapter mit. Aktuell kommt dauerhaft nur ein Telegram an mit der ID 0x3d2 und einem Dataframe der mit 31 beginnt und sich langsam hochzählt. Laut Anleitung soll man nun einen CAR Speed vorgeben siehe Bild. Wie mache ich das jetzt? Wie muss die Nachricht aussehen? Oder hat sonst jemand Erfahrung mit den Dingern? Danke. Gruß kami
Ob die Doku des Sensors "Collision Avoidance System CAS-M light" zu Deinem Sensor passt ist nicht sicher, die von Dir beobachtete Message ID 0x3D2 kommt dort nicht vor. Zum testen der "Vehicle Speed" Message kannst Du einfach acht 0x00 Bytes mit der Message ID 0x616 senden. Das ist zwar die Geschwindigkeit 0, das sollte aber erstmal egal sein. Eventuell ist es nötig die Message periodisch zu senden.
Hi, gemacht das sieht dann so aus: Er antwortet mit 01. Mein Bosch Sensor trägt die Bezeichnung: Bosch F 02U v02 647-01 hat dazu jemand was? Gruß kami
Das ist dann vermutlich "Collision Avoidance System CAS-M 3 EVO" und
relativ sicher passt die Doku "Collision Avoidance System CAS-M light"
nicht dazu ("CAS-M 3 EVO" kann z.B. deutlich mehr Objekte tracken als
"CAS-M light").
Mhh, ja sieht so aus als wenn der zur EVO Line gehört. Jemand irgendwelche Infos dazu? Sonst wird das wohl schwer da was rauszufinden. Danke. Gruß kami
Hallo zusammen, habe inzwischen aus der Firmware ein paar Dateien gefunden, die ich aber noch nicht wirklich deuten kann. Also der Radar-Sensor arbeitet wohl im Request-Response-Verfahren. Wie er aber genau angesprochen werden muss hat sich für mich noch nicht ergeben. Vielleicht kann mir hier jemand mit den Dateien helfen? Danke. Gruß kami
Diese Firmware ist relativ sicher für das Display des CAS-M 3 EVO Systems und nicht für den Radar Sensor.
Stefan S. schrieb: > Ich möchte gerne, während der Fahrt den Abstand zum vorderen Fahrzeug > selber messen. Fahre halt einfach nicht so dicht auf, lass mehr Abstand, dann brauchst Du das nicht.
Mal ne Zwischenfrage: Wenn alle moderenen KFZ mit so einem Frontradar rum fahren, wieso stören die sich nicht gegenseitig? Und nein HF ist nicht mein Fachgebiet 😁.
Dieter S. schrieb: > Diese Firmware ist relativ sicher für das Display des CAS-M 3 EVO > Systems und nicht für den Radar Sensor. Hi, dachte aber das Display ja Anfrage an den Sensor schickt und deswegen in der Firmware etwas drin stehen müsste. Gruß kami
Dieter D. schrieb: > Stefan S. schrieb: >> Ich möchte gerne, während der Fahrt den Abstand zum vorderen Fahrzeug >> selber messen. > > Fahre halt einfach nicht so dicht auf, lass mehr Abstand, dann brauchst > Du das nicht. Keine Sorge. Mein Punktekonto ist leer, es geht mir darum die Hardware zu nutzen und sowas an meinem Auto selber nachzurüsten. Gruß kami
Mich würde eher der Abstand des KFZ hinter mir interessieren. In der Heckscheibe dann noch ein Display das gleich die Strafe in € fürs dicht Auffahren anzeigt.
Stefan S. schrieb: > > dachte aber das Display ja Anfrage an den Sensor schickt und deswegen in > der Firmware etwas drin stehen müsste. Ja, dazu muss man sich nur die knapp 12 MByte Firmware genauer anschauen. Die Firmware basiert auf vxWorks, das macht es etwas leichter.
Hi, heißt das du kannst da etwas draus erkennen? Gruß kami
Stefan S. schrieb: > > heißt das du kannst da etwas draus erkennen? Wenn ich mehrere Tage Zeit in die Analyse der Firmware stecken würde dann könnten dabei vermutlich die CAN-Messages für die Kommunikation mit dem Radar Sensor herauskommen.
Crazy Harry schrieb: > Mich würde eher der Abstand des KFZ hinter mir interessieren. Strafzettel juckt die Auffahrenden oft wenig, aber Respekt gibt es wenn hinten der Kofferraumdeckel hoch geht, die Kanone ausschwenkt und es dann beim Auffahrenden einschlägt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.