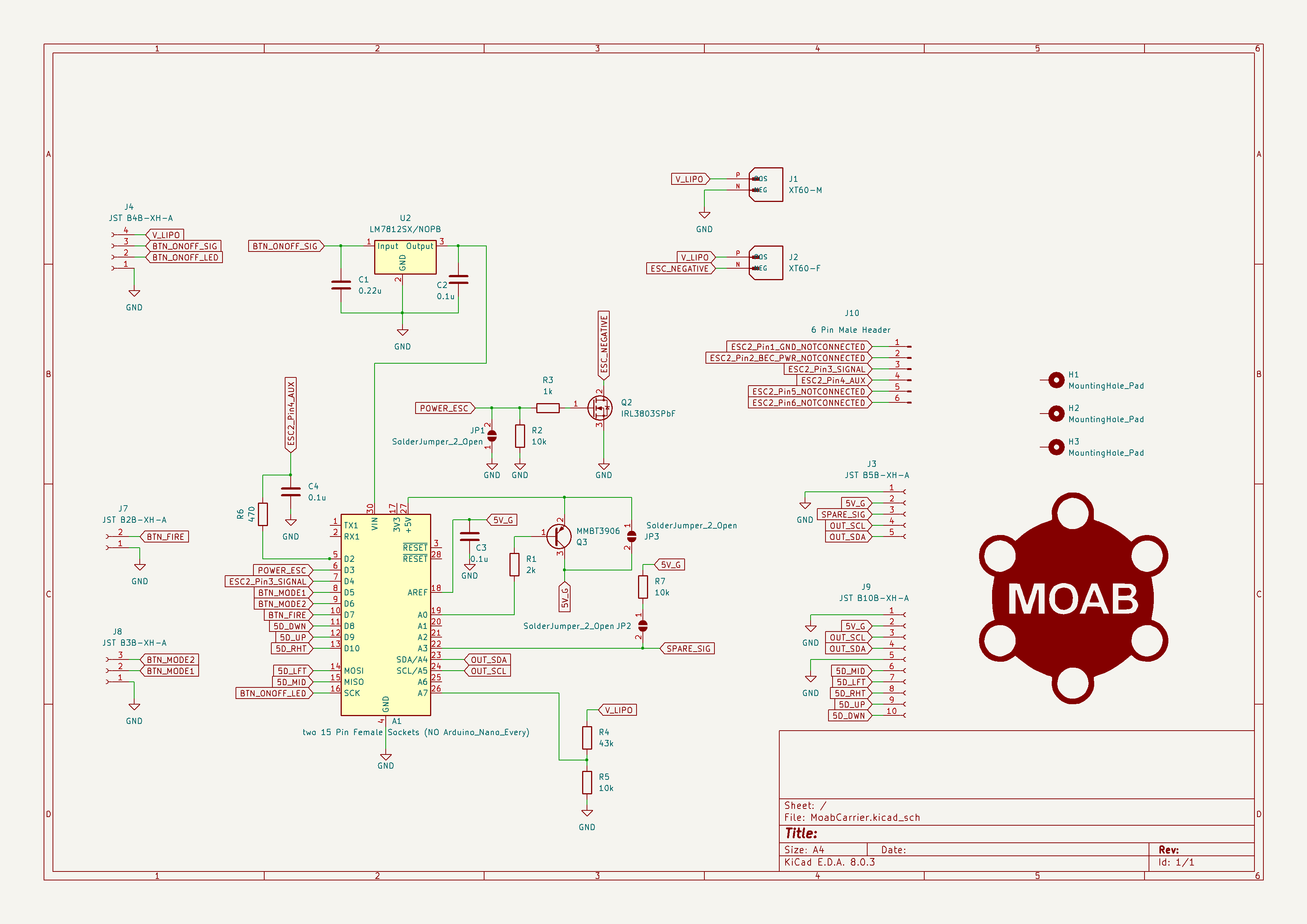
Hallo zusammen, ich habe für meine Nerf Minigun (https://www.youtube.com/watch?v=VMngCFPhtd4 ) eine eigene (& meine erste) Platine entwickelt. Eigentlich sollte sie nur ein paar Kleinigkeit machen, aber der feature-creep war unaufhaltsam.... Aktuell habe ich einen IRL3803SPbF N-LL-Mosfet, der den ESC (Motor controller für den brushless motor) mit Strom versorgt (ich will den ESC bei Bedarf an oder ausschalten können). Der Rest meiner Platine sollte irrelevant für dieses Thema sein. Ich überlege jetzt ein HW-Kit meiner Nerf Minigun mit brushed Motor zu machen (da viel günstiger). Und das am besten ohne separaten ESC, sondern die Platine versorgt direkt den Motor, in PWM Taktung (nen Arduino ist schon auf der Platine, der sollte für die Regellogik ausreichen). Nun die zentrale Frage: wieviel müsste ich auf meiner Platine noch ändern, um das umzusetzen? Ist das viel? Ich würde denken, dass ich wohl noch folgendes bräuchte: * nen anderen Mosfet brauche, der den brushed Motor besser mit PWM takten kann? * evtl. noch nen treiber oder so, der vom Arduino angesteuert wird und den Mosfet schnell "flutet" oder wie das heisst * und dann noch ein paar Kondensatorchen ;) Bin ich da zu naiv? Leider bin ich noch dabei, einen brushed Motor auszuwählen, daher lässt sich jetzt wohl noch nicht final Mosfets, Kondensatoren etc. bestimmen, richtig? Vielen Dank!
Angehängte Dateien:
-

MOAB_v1.0_Schaltplan.png
60 KB
Du wirst um ein komplettes Redesign nicht herumkommen. Die Motorsteuerung ist jetzt nicht so wahnsinnig einfach, der Atmega328 sollte entsprechende Peripherie dafür haben, die kostet aber Timer, gegebenenfalls gibt das dann Probleme mit dem restlichen Arduino-Code. Kannst du nicht deinen zugekauften Brushless-ESC durch einen anderen ESC ersetzen, der deine zukünftigen Motoren direkt ansteuern kann? Die Frage, die du verfolgst, ist aber ein wenig schräg. Sofern es sich nicht um eine Massenproduktion handelt, sind die Kostenunterschiede zwischen tatsächlich ähnlich leistungsfähigen Motoren nicht so relevant. So wahnsinnig komplex und langlebig wird deine Anwendung schon nicht sein, dass hierfür besonders leistungsstarke und tolle Motoren zum Einsatz kommen müssen.
genau, da kommen darts raus. Hmm, ich hoffe das habe ich nur schlecht erklärt, ich versuche es nochmal ohne das drum rum: ich habe eine Custom-Platine mit nem Arduino Nano Every drauf und ich möchte mit dieser Platine nen brushed Motor steuern. Aktuell tut der Arduino bereits den ESC über nen 1khz Signal ansteuern, ich denke es ist kein Problem, den output auf ein X khz PWM Signal zu ändern. Ich versuche einen extra brushed-ESC zu vermeiden, um Kosten zu sparen (ich will hunderte der HW-Kits verkaufen). Ich war davon ausgegangen, wenn ich mir n paar Mosfets, Transistoren, Kondensatoren auf die Platine mache, ich mir den externen ESC sparen kann und somit deutlich Geld & Aufwand spare (weniger löten etc. pro HW-kit). Die Frage ist, ob ich mir das zu einfach vorstelle (und ob da überhaupt so ein großes Einsparpotential ist..). Ist meine Frage weiterhin schräg? :-)
Man kann aber nichts verkaufen, wenn man keine Ahnung hat. Schon garnicht "hunderte Kits".
Thomas B. schrieb: > ich habe eine Custom-Platine mit nem Arduino Nano Every drauf und ich > möchte mit dieser Platine nen brushed Motor steuern. So weit, so gut. Was heißt "steuern" in diesem Fall? Geschwindigkeit, Richtung, mit Rückmeldung? Wie sieht das Bremsverhalten aus? Soll der Motor aktiv stoppen oder auslaufen? > Aktuell tut der Arduino bereits den ESC über nen 1khz Signal ansteuern, > ich denke es ist kein Problem, den output auf ein X khz PWM Signal zu > ändern. Das sollte funktionieren, damit kannst du jetzt aber den Motor ungeregelt in eine Richtung drehen lassen und er wird nach dem Hochdrehen langsam auslaufen. Für mehr brauchst du mehr Ausgänge und mehr Software. > Ich versuche einen extra brushed-ESC zu vermeiden, um Kosten zu sparen > (ich will hunderte der HW-Kits verkaufen). Au weia. Wir sehen jetzt mal ganz gezielt von regulatorischen Anforderungen ab, über die du dich selber informieren darfst. Bei dieser Stückzahl würde ich nicht bei so einem komplexen Teil wie der Motorsteuerung sparen, sondern vielleicht deinen Microcontroller durch etwas ersetzen, das der Aufgabe angemessen ist. Dadurch lassen sich bei deinem projektierten Volumen tausende Euro an Kosten sparen. > Ich war davon ausgegangen, wenn ich mir n paar Mosfets, Transistoren, > Kondensatoren auf die Platine mache, ich mir den externen ESC sparen > kann und somit deutlich Geld & Aufwand spare (weniger löten etc. pro > HW-kit). Du verkennst die Realität der Fertigung. Es gibt Motorsteuerungs-ICs, dann pack da einen auf deine Platine. Sowas selber irgendwie hinzubasteln aus diskreten Komponenten mit einer recht einfachen Vorstellung davon, was das bei der Microcontroller-Programmierung nach sich zieht, halte ich für wenig zielführend. > Die Frage ist, ob ich mir das zu einfach vorstelle (und ob da überhaupt > so ein großes Einsparpotential ist..). Da du nicht damit rausrücken magst, was deine Kostenverteilung ist, welche Komponenten du einsetzt und ja nicht einmal weißt, wieviel weniger ein geeigneter bürstenbehafteter Motor kostet, ist es sehr schwierig, das zu bewerten. Du kennst dich aus, also musst du auch wissen, ob es einfach ist. Wenn du das nicht weißt, hast du nicht genug recherchiert. Ich rate mal, dass du einen zu starken Motor benutzt, weil der bei den niedrigen Drehzahlen, die du brauchst, ein ausreichendes Drehmoment hat. Richtige Konstruktionen verwenden kostengünstige Motoren und ein entsprechendes Getriebe, ich glaube nicht, dass du für deinen Motor plus ESC mehr als 10 Euro ausgeben musst. Wahrscheinlich kriegt man das auch weiter gedrückt. Selbstverständlich kann man da durch einen kleinen bürstenbehafteten Motor noch mehr sparen, der muss ja nicht elektronisch kommutiert werden, nur hast du dann eben ein komplettes Redesign deiner Schaltung und nicht einfach nur irgendwelche Transistoren und Kondensatoren auf die Platine klatschen. Der ESC kümmert sich um sehr vieles, das musst du dann eben übernehmen. > Ist meine Frage weiterhin schräg? :-) Ein wenig, ja.
Thomas B. schrieb: > Nun die zentrale Frage: wieviel müsste ich auf meiner Platine noch > ändern, um das umzusetzen? Nichts. Der Motor kommt zwischen V_LIPO und ESC_NEGATIVE und du brauchst ESC2_Pin3_SIGNAL und ESC2_Pin4_AUX nicht mehr, die sowieso ein grober Fehler waren, Steuereingänge an ein Modul dessen Masseverbindung unterbrochen waren können bis zur Zerstörung des uC führen. An den Motor kommt noch eine Freilaufdiode. ABER: Dann tut deine Schaltung auch nicht viel. Sie kompensiert nicht die sinkende Akkuspannung und damit sinkende Drehzahl des Motors, sie überprüft nicht die Stromaufnahme und damit eventuelles blockieren, und sie kann ihn natürlich nicht rückwärts drehen lassen. Da du das kommerziell vertreibst und der Motor wohl den Dart beschleunigt, musst du technisch sicherstellen, dass die maximale Geschossenergie, was bei gegebenem Pfeilgewicht das Tempo bedeutet also die Motordrehzahl, auch im Fehlerfall nicht überschritten werden kann. Das könnte man natürlich einhalten wenn der Motor auch bei vollem Akku nicht schneller drehen kann, würde bei nachlassendem Alku aber absinken was man wohl nicht will
Hallo Thomas, nette Idee aber vergiss es. Du wirst keine risikobeurteilung schreiben können, die das sicher erklärt! Du gillst nach Veröffentlichung des Produktes (Vorschau aus neuer MVO) als Markteinführer. Da empfehle ich definitiv Fortbildung um die gesetzliche Lage kennenzulernen. Die ATSAM Hardware hat mehrere Hardware pwm Channel, auch PIC18F5xxx glaube ich hat Hardware PSMC oder auch BLDC womit sowas ohne CPU Last laufen würde. Arduino kannst zwar als bootloader nutzen, ist allerdings zu Mainstream um solche Hardware frei zu konfigurieren. Kleiner Tipp: baue es für dich selbst, wie es deine Fähigkeiten zulassen, die Vermarktung lass sein! Gruß Martin
F. schrieb: > Thomas B. schrieb: >> ich habe eine Custom-Platine mit nem Arduino Nano Every drauf und ich >> möchte mit dieser Platine nen brushed Motor steuern. > > So weit, so gut. Was heißt "steuern" in diesem Fall? Geschwindigkeit, > Richtung, mit Rückmeldung? Wie sieht das Bremsverhalten aus? Soll der > Motor aktiv stoppen oder auslaufen? Der Motor läuft nur in eine Richtung, ein bremsen ist nicht nötig (also keine H-Schaltung nötig). > >> Aktuell tut der Arduino bereits den ESC über nen 1khz Signal ansteuern, >> ich denke es ist kein Problem, den output auf ein X khz PWM Signal zu >> ändern. > > Das sollte funktionieren, damit kannst du jetzt aber den Motor > ungeregelt in eine Richtung drehen lassen und er wird nach dem > Hochdrehen langsam auslaufen. Für mehr brauchst du mehr Ausgänge und > mehr Software. Ja, das Thema mit der konstanten Drehgeschwindigkeit, das Erkennen eines blockierten Motors etc. ist hier nicht abgedeckt und hatte ich zuletzt vernachlässigt. Ich habe noch die Möglichkeit, einen Hall-Sensor anzuschliessen, darüber könnte ich ja die Regelung und die Erkennung, ob der Motor andreht/dreht, machen - ich habe für die aktuelle ESC+BLDC-Variante bereits eine Drehzahlregelung die ausreichend gut funktioniert (in der ESC+BLDC-Variante ist zwar noch der ESC mit seinem eigenen Regler dazwischen..., aber nen brushed motor ohne extra ESC selber zu regeln ist doch kein Hexenwerk? :-)) > >> Ich versuche einen extra brushed-ESC zu vermeiden, um Kosten zu sparen >> (ich will hunderte der HW-Kits verkaufen). > > Au weia. Wir sehen jetzt mal ganz gezielt von regulatorischen > Anforderungen ab, über die du dich selber informieren darfst. Bei dieser > Stückzahl würde ich nicht bei so einem komplexen Teil wie der > Motorsteuerung sparen, sondern vielleicht deinen Microcontroller durch > etwas ersetzen, das der Aufgabe angemessen ist. Dadurch lassen sich bei > deinem projektierten Volumen tausende Euro an Kosten sparen. > Hmm, ja, der Arduino ist sicher eher für allgemeines, einfaches rumbasteln gemacht und mit 15€ nicht besonders günstig. Aber wenn ich den Microcontroller wechsel, muss ich alle Features neu implementieren oder integrieren (e.g. LCD) und die PCB auf den neuen MC anpassen (also zeug wie quartz raus suchen und drauf packen). >> Ich war davon ausgegangen, wenn ich mir n paar Mosfets, Transistoren, >> Kondensatoren auf die Platine mache, ich mir den externen ESC sparen >> kann und somit deutlich Geld & Aufwand spare (weniger löten etc. pro >> HW-kit). > > Du verkennst die Realität der Fertigung. Es gibt Motorsteuerungs-ICs, > dann pack da einen auf deine Platine. Sowas selber irgendwie > hinzubasteln aus diskreten Komponenten mit einer recht einfachen > Vorstellung davon, was das bei der Microcontroller-Programmierung nach > sich zieht, halte ich für wenig zielführend. Gibt es denn eine Seite/Tutorial, was aufzeigt, was dort zu machen ist? Ich sehe (abgesehen von Drehzahlregelung, Blockieren des Motors und evtl. allgemeines überhitzen) keine Todos auf Programmierungsseite - ich dachte eher, dass die Elektronik das nervige ist. > >> Die Frage ist, ob ich mir das zu einfach vorstelle (und ob da überhaupt >> so ein großes Einsparpotential ist..). > > Da du nicht damit rausrücken magst, was deine Kostenverteilung ist, > welche Komponenten du einsetzt und ja nicht einmal weißt, wieviel > weniger ein geeigneter bürstenbehafteter Motor kostet, ist es sehr > schwierig, das zu bewerten. > Du kennst dich aus, also musst du auch wissen, ob es einfach ist. Wenn > du das nicht weißt, hast du nicht genug recherchiert. Ich rate mal, dass > du einen zu starken Motor benutzt, weil der bei den niedrigen > Drehzahlen, die du brauchst, ein ausreichendes Drehmoment hat. Richtige > Konstruktionen verwenden kostengünstige Motoren und ein entsprechendes > Getriebe, ich glaube nicht, dass du für deinen Motor plus ESC mehr als > 10 Euro ausgeben musst. Wahrscheinlich kriegt man das auch weiter > gedrückt. Selbstverständlich kann man da durch einen kleinen > bürstenbehafteten Motor noch mehr sparen, der muss ja nicht elektronisch > kommutiert werden, nur hast du dann eben ein komplettes Redesign deiner > Schaltung und nicht einfach nur irgendwelche Transistoren und > Kondensatoren auf die Platine klatschen. Der ESC kümmert sich um sehr > vieles, das musst du dann eben übernehmen. Bei den 10€ für Motor+ESC, denkst du da an BLDC oder brushed? Also der Motor muss bei 3000RPM ca. 70 Watt Leistung bringen. Ich könnte dort auch nochmal eine Übersetzung von 1:4 davor schalten. Ich dachte, dass bei BLDC es deutlich teurer wird (mind. 50€?), und bei brushed ist man vielleicht bei 5€ für den Motor, günstige ESCs (unter 15€) habe ich nicht gefunden. Hast du da ein Beispiel für einen günstigen Motorcontroller (den ich auf die PCB setzen kann oder der als separate PCB kommt)? > >> Ist meine Frage weiterhin schräg? :-) > > Ein wenig, ja. schade. Hmm, vielleicht wäre es auch sinnvoll, dass ich das Thema outsource, an jemanden der sich auskennt? Das würde mir viel Zeit sparen - denn die Platine+Motor sind aus meiner Sicht nur vielleicht 10% des Wertes/Arbeitsleistung des gesamten HW-Kits (zum HW-Kit würden noch 50+ anderen Zukaufteile (Kugellager etc) kommen und vor allem noch die Druckdateien dazu gehören. Der Blaster als ganzes ist das interessante, nicht wie der Motor angesteuert wird).
> die sowieso ein grober > Fehler waren, Steuereingänge an ein Modul dessen Masseverbindung > unterbrochen waren können bis zur Zerstörung des uC führen. Das stimmt. der Fehler ist mir leider zu spät aufgefallen und das ist der eigentliche Grund, warum ich die Platine nochmal überarbeite... > Da du das kommerziell vertreibst und der Motor wohl den Dart > beschleunigt, musst du technisch sicherstellen, dass die maximale > Geschossenergie, was bei gegebenem Pfeilgewicht das Tempo bedeutet also > die Motordrehzahl, auch im Fehlerfall nicht überschritten werden kann. Der Motor dreht nur die Hauptwelle, die Darts werden anhand eines Plunger-Systems beschleunigt, also anhand von Luftdruck der über eine Feder erzeugt wird - daher ist die Geschwindigkeit der Darts konstant und unabhängig von der Drehzahl des Motors (ich bin sogar unter 0,3J also alles easy)
Martin D. schrieb: > nette Idee aber vergiss es. Du wirst keine risikobeurteilung schreiben > können, die das sicher erklärt! Du gillst nach Veröffentlichung des > Produktes (Vorschau aus neuer MVO) als Markteinführer. Da empfehle ich > definitiv Fortbildung um die gesetzliche Lage kennenzulernen. > > Arduino kannst zwar als bootloader nutzen, ist allerdings zu Mainstream > um solche Hardware frei zu konfigurieren. Danke Martin, das CE etc. Thema ist auch noch offen. Aber was spricht konkret gegen den Arduino?
Du musst dich halt entscheiden, was du willst. Willst du eine kostenoptimierte Massenproduktion, dann musst du den Aufwand in die Entwicklung stecken, um die Kosten pro Teil zu reduzieren und damit deine Marge zu erhöhen. Wenn du den Aufwand nicht willst, dann musst du das, wie du bereits richtig erkannt hast, outsourcen. Da wird sich halt aber auch niemand ohne gut ausgearbeitete Spezifikation und genauem Wissen, was du willst, herantrauen, das noch für einen dreistelligen Betrag zu machen. Nicht, weil die Elektronik sonderlich kompliziert wäre, sondern, weil es vieler Absprachen bedarf, die Zeit kosten und damit bezahlt werden wollen. Du schreckst halt schon davor zurück, dein 15-Euro-Microcontroller-Board durch den Microcontroller direkt auf deiner Platine zu ersetzen, da wird der Rest auch nicht durchdacht genug sein, dass dein Projekt die Anforderungen erfüllt, um in Verkehr gebracht zu werden. Ein paar Aspekte wurden ja bereits angesprochen. Willst du wenig Arbeit und niemanden bezahlen, dann musst du auf verfügbare Module zurückgreifen. Das machst du ja bereits, stellst nun aber fest, dass das sehr teuer wird. Ich kann verstehen, dass du die Elektronik nicht als wichtig ansiehst, aber bei großartigen Vorstellungen von hunderten verkauften Einheiten musst du damit rechnen, dass Leute mal nachfragen. Ja, was du machen willst, ist nicht "schwierig" in dem Sinne, dass es eine besonders ausgeklügelte Schaltung bräuchte. Aber es ist schwierig in dem Sinne, dass es ein Integrationsproblem ist, da deine Komponenten richtig zusammenarbeiten müssen. Spielzeughersteller kriegen das problemlos hin, auch kleine Akkuschrauber haben Motoren in den Leistungsklassen, wie du dir sie vorstellst. Technisch ist das kein Problem, aber sowas kostet Entwicklungsressourcen. Nichts für ungut, aber wenn du schon keine Lust hast, dich von deinem Microcontroller-Board zu lösen, weil es zu viel Aufwand ist, dann kannst du den Einsatz einer selbstgebastelten Motorsteuerung völlig vergessen. Die bekommt durch unzureichendes Layout sofort Temperaturprobleme. Aber probier's gern mal aus, so eine Platine kostet ja kaum was, das sollte das Entwicklungsbudget hergeben: Einen ordentlichen FET, ggf. noch einen Gate-Treiber (braucht man aber nicht, du willst es ja billig haben), Freilaufdiode, Low-ESR-100µF-Kondensator ganz nah an der Spannungsversorgung des Microcontrollers. Nach Möglichkeit mit der PWM-Frequenz so weit wie möglich runtergehen, die Mechanik ist träge, kann das also verkraften. Und dann eben schauen, ob's funktioniert. Dann kannst du glücklich sein und nur hoffen, dass keiner der hunderten Käufer deines (Waffen?-)Bausatzes oder ein Mitbewerber auf die Idee kommt, dich zu verpetzen.
Thomas B. schrieb: > Aber was spricht konkret gegen den Arduino? Ich habe mal einen arduino mit 3x BLDC und jeweils hall feedback realisiert. Leider ist es so, dass dazu teilweise das Pin- und Peripherie- Mapping geändert werden musste. Dies ist je nachdem was man vor hat ein sehr komplexes Vorhaben. Natürlich kann Software das auch, ist nur nicht sicher! Denn wenn eine Instruktion unterbricht wegen Z.b. interrupt, ist das timing im Eimer! Kann unter Umständen zu hohen back-emf Spannungen kommen. CPU sollte immer frei laufen können und pwm usw. Auf unabhängigen Hardware Level! Daher mein Tipp: MPLAB und passende MCU. Brauchst lediglich einen programmieradapter im Gegensatz zum arduino. Dafür bekommst du volle Kontrolle ohne Einschränkungen.
Hmm, ihr habt Recht, das mit dem brushed Motor ist nicht so mal nebenbei getan. Ich werde daher das Thema erstmal pausieren und es dann später evtl. ordentlich angehen - mit nem Profi der mich bei der Komponentenauswahl unterstützt usw. Danke für eure Hilfe
Martin D. schrieb: > Da empfehle ich > definitiv Fortbildung um die gesetzliche Lage kennenzulernen. Ja das wäre zwingend notwendig. Das war er bauen will ist eine automatik-Waffe.
Mampf F. schrieb: > Das war er bauen will ist eine automatik-Waffe. .. die SchaumstoffPfeile "verschiesst". Nu mach mal halblang ;)
Es ist keine Schusswaffe gem. WaffG, da die Geschossenergie unter 0,5 Joule ist (bei meinem Blaster ist sie sogar unter 0,3 Joule): https://www.gesetze-im-internet.de/waffg_2002/anlage_2.html Also so wie bei allen im Spielwarengeschäft erhältlichen Nerf Blaster, mein Blaster schiesst halt nur besonders viele Darts ab...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.