Fortsetzung von: Beitrag "BLDC, Synchronmaschine, Drehfeld Experimentierschaltung"
Angehängte Dateien:
-

power_part7.PNG
18 KB

So. Wo soll ich nun die Messung für die Gesamtstromaufnahme hintun? An A, B oder C ? Weiter: Kann ich die Platine von BxH 100x80 auf 160x100 erhöhen?? Oder habt ihr da was dagegen? Soll die Verschaltung der Motorstränge zum (virtuellen) Sternpunkt vor oder hinter den Shunts erfolgen? (sollte eigentlich egal sein)
Matthias L. wrote: > So. Wo soll ich nun die Messung für die Gesamtstromaufnahme hintun? > An A, B oder C ? Zwischen A und B seh ich keinen grossen Unterschied. Ich persönlich würde glaub ich C nehmen, wobei dann erkennt man nicht ob man evtl die Quelle mit dem Chopper Überlastet, wenn sowas überhaupt möglich ist. Entscheidet ihr das, solange das in der + Seite ist find ich's gut. > Weiter: > Kann ich die Platine von BxH 100x80 auf 160x100 erhöhen?? > Oder habt ihr da was dagegen? Also ich fände es kleiner schon besser, aber wenn's nicht anders geht. > Soll die Verschaltung der Motorstränge zum (virtuellen) Sternpunkt vor > oder hinter den Shunts erfolgen? (sollte eigentlich egal sein) Da wir ja dank Allegro gar keine Shunts mehr haben ;) ist es egal, ansonsten auf der Motorseite. Kannst du mit den Anschlüssen so was anfangen? Raster 1.27mm?
>Kannst du mit den Anschlüssen so was anfangen? Raster 1.27mm?
In welchem Zusammenhang meinst du das?
Wegen der Motorrückführung:
Ich hatte mal ne Schaltung gesehen, die war nicht mit 9xR und 3xC
aufgebaut, sondern etwas komplizierter mittels 3x OPV. Die würde ich
bevorzugen. Find sie aber nicht mehr...
Und was schlagt ihr als FET-Treiber für die Bremse vor? Ein IR2110, nur LOW-side beschaltet, oder etwas diskretes?
Vielleicht auch einfach nur ein FET der für TTL geeignet ist? Ich hab mal etwas rumgesucht aber nix mit OPAmps gefunden. http://stag.zcu.cz/fel/kev/st_texty/Male%20stroje/Pr%84sentationenDeutsch/BCd_ECmotor.ppt Ich meinte die SMD Stiftleisten.
Matthias L. wrote: > Und was schlagt ihr als FET-Treiber für die Bremse vor? > Ein IR2110, nur LOW-side beschaltet, oder etwas diskretes? IR2110 könnte man nehmen, um es einheitlich zu machen. Ansonsten gäbe es auch noch sowas wie den ICL7660. Ohne würde ich den IRF3415 nicht ansteuern. > Wegen der Motorrückführung: > Ich hatte mal ne Schaltung gesehen, die war nicht mit 9xR und 3xC > aufgebaut, sondern etwas komplizierter mittels 3x OPV. Die würde ich > bevorzugen. Find sie aber nicht mehr... Das machen wird doch ähnlich: Die OPs dienen als Komparator, und diese sitzen bei uns im AVR. Es sind aber trotzdem noch eine Menge Widerstände notwendig. Der einzige Unterschied liegt darin, dass die OP Variante den Mittelwert der beiden angesteuerten Phasen jeweils mit der nicht angesteuerten vergleicht, während wird alle 3 Phasen mitteln und diese mit der nicht angesteuerten vergleichen. Das Signal ist dann ein klein wenig schwächer, aber das stört nicht weiter. Die Cs würde ich aber auf jedenfall mal vorsehen, bei mir waren diese die Ursache wiso es nicht ging (das Ding hat auf irgendwelche Spikes getriggert, anstelle auf den Nulldurchgang der Spannung) Und die Strommessung unbedingt in Punkt C, sonst gehen die Mosfets beim Bremsen kaputt und niemand merkt das. Verwenden wir jetzt eigentlich eine hardwaremäßige Überstromabschaltung ?
Hallo, ein interesantes Projekt, auch sehr ergeizig! Ich habe vor kurzem meinen BLDC für den Modelbau fertig gestellt. Und das eizige Problem das ich habe, ist die Strommessung auf der Platine. ( mein ein geätzer Shunt hat sich bei 20A verabschiedet ;-) Da sich das Datenblatt von den 712 gut anhört würde ich euch bei einer eventuellen Sammelbestellung auch 10 Stück abnehmen. Gruß Stumpf
Die Strommessung hab ich gestern schon eingeroutet in Punkt A. Meine Idee wegen der OPV war nur, dass das dann auf der Leistungsplatine für verschiedene Leistungen/Spannungen/Ströme angepasst werden kann, und zum Steuerteil immer identische Pegel (TTL) gehen könnten. Weil ja 7V<Ub<75V Ich werde für die Bremse einen IR2110 als Lowside vorsehen. >Also ich fände es kleiner schon besser, aber wenn's nicht anders geht. Wenn ich die Größe so lassen, bekomme ich die Spannungsversorgung von 5V und 12V aus dem ZK nicht drauf. Und das wollte ich zwingend mit draufbauen.
Matthias L. wrote:
> Die Strommessung hab ich gestern schon eingeroutet in Punkt A.
Damit bin ich überhaupt nicht einverstanden. Alle Schaltungen die ich
kenne (egal ob Developement Boards bon Microchip, Freescale, Atmel usw.)
oder aus anderen Frequenzumrichtern), haben die Strommessungen direkt an
den Source Pins der Mosfets. Bei uns also in der + Leitung, aber das
läuft auf das gleiche raus.
Mit dem Stromsensor in Punkt A hat man keine Möglichkeit einen
Kurzschluss zu erkennen um noch schnell genug abzuschalten ehe die
Mosfets ihren Aggregatszustand verändern.
Na ok. Dann werd ich das abends mal ändern auf Punkt C. SOnst noch Wünsche, Vorschläge Kritiken zur bisherigen Schaltung?
Moin falls Q2 deine Bremse sein soll, dann solltest du die lieber garnicht ansteuern- ausser du willst Q2 ,F1 ,R1 zerstören:-) Gebremst wird so ein Motor normalerweise indem man die drei Low-Side FETs gemeinsam einschaltet und damit die Phasen alle miteinander verbindet (evtl per PWM- je nach dem wie aprupt er stehen soll). Warum willst du den strom in der + seite messen?? In der Masse is do viiiiiel einfacher... MFG Jan
Gast wrote: > Moin > falls Q2 deine Bremse sein soll, dann solltest du die lieber garnicht > ansteuern- ausser du willst Q2 ,F1 ,R1 zerstören:-) Wiso sollte das passieren ?
@Gast: Wie soll das passieren? Ausserdem soll damit nicht der Motor gebremst werden, sondern nur ein "Überladen" des ZK verhindert werden. (Während der Motor bremst)
Freut mich, dass der Vorschlag für die Halleffekt-Stromsensoren so schnell eingebaut wurde. Das Projekt hat noch keine Wikiseite, oder? Es wäre schon noch praktisch wenn man die wichtigsten Sachen dort hineinstellen kann, damit Leute, die nicht den ganzen ersten Thread durchkämmen wollen, auch noch eine Chance haben.
Ist eine Messung der ZK-Spannung vorgesehen? Wäre sicher nicht uninteressant.
>Messung der ZK-Spannung vorgesehen?
Ja. Schon allein um den Brems-R anzusteuerun. Nur Spannungsmessungen hab
ich noch nicht in der Schaltung drin. Folgt noch...
AVR-User wrote: > Ist eine Messung der ZK-Spannung vorgesehen? Wäre sicher nicht > uninteressant. Ohne die ZK Spannung wäre der Bremschopper witzlos. Keine Angst das ist drin. @lippy, dann mach es grösser, einbauen kann man das eh nirgens. ;)
@lippy: Wenn ich dich jetzt richtig verstanden hab geht es dir gar nicht so sehr darum den Virtuellen Mittelpunkt nicht mit Rs zu machen sonder, darum dessen Potential gemütlich anzupassen. Da wir aber doch eh nur eine Nullpunkterkennung haben wollen, sollte doch eine Einfache Begrenzung reichen, zugegeben dafür wäre ein OPAmp natürlich ideal. Einfach ein OPAs mit Gain=1 und Vcc=5 einbauen und fertig. Wäre zumindest mein Vorschlag.
Würde heute abend mal anfangen mit dem Wiki-Eintrag. Frage: Wie erstelle ich einen neuen Wikibeitrag?
>Wenn ich dich jetzt richtig verstanden ha Ja. Es geht nur darum, unabhängig von der ZK-Spannung eine sichere Erkennung zu machen. Deshalb mein Vorschlag das mit Komparatoren zu machen, wie in deinen Link hier: >Hier ist noch eine Alternative: Ja. So etwa sa das damals aus. >dann mach es grösser, einbauen kann man das eh nirgens. ;) (Macht ja nix, soll ja ein Experimentierboard sein) Ok. 160x100 hätte den VOrteil, dass es für diese Größe fertige Köhlkörper gibt. Aber ich werde mal sehen, welchen Platzbedarf ich habe.
Wenn du bei den FETs sehr viel mehr Platz gewinnst, würde ich auch gerne wieder die gesplitteten High-Side -Low-Side Leitungen ins Gespräch bringen. Zumindest bis zu den Stromsensoren. Nur falls du den Teil sowieso neu machen willst, um z.B. die FETs weiter zu verteilen, ansonsten nehmen wir das so wie es ist.
Matthias L. wrote: >>Wenn ich dich jetzt richtig verstanden ha > Ja. Es geht nur darum, unabhängig von der ZK-Spannung eine sichere > Erkennung zu machen. Deshalb mein Vorschlag das mit Komparatoren zu > machen, wie in deinen Link hier: Wo ist da jetzt das Problem ? Die Phasenspannungen z.B. via 47k/4,7k runterteilen, dann mittels 3er Widerstände (z.B. 47k) zusammenführen, und man hat den Sternpunkt. Die 3 Spannungen gehen direkt zum AVR. Das ganze funktioniert bis 55V ZK Spannung. Sollte die Spannung mal höher werden, passiert auch nichts, da die Schutzdioden im AVR leitend werden.
@ Lippy könnte man die Schaltregler nicht evtl auch auf die Controller platine machen, die ist sonst so leer.
>könnte man die Schaltregler nicht evtl auch auf die Controller >platine machen, die ist sonst so leer Könnte man schon, wollte ich aber nicht. Ich halte es für sinndvoller nur TTl Pegel als Schnittstelle zu verwenden. Aber du könntest entsprechende Anzeige/Bedienelemente sowie den UART (mit OE) direkt vorsehen. Da könnte man sich die 3.Platine (Bedienung) sparen... >Die Phasenspannungen z.B. v Ok. Dann bleibt das so. >e gesplitteten High-Side -Low-Side Leitungen Wenn ich FET-Sektion auseinanderziehe, könnte das evtl gehen.
Was ist als Userinterface geplant? Wie wärs mit einer optoisolierten USART für die RS232- oder USB-Anbindung? Dann könnte man das ganze bequem vom PC aus steuern. Oder LCD zur Anzeige und überwachung der Parameter?
Genau das ist geplant, eigentlich denke ich lippys Spannungswandlern soweit zu vertrauen das keine galvanische Trennung nötig sein wird. Mir schwebt ja so ein FTDI usb-ttl kabel vor. Später soll es aber noch eine Steuerplatine geben mit display und allem. Achja apropos: @lippy, ich bin dagegen das Userinterface auf das Controllerboard zu machen, 1. Eine UI für mehrere Motoren 2. Auch mal einen anderen UC (Propellor, msp ...) 3. wird mir zu Teuer Man könnte eher die Controllerplatine so klein machen, das man die Steuerplatine noch nebendran bekommt, wenn man das möchte.
Was ich mir auf der Prozessor Platine vorstelle: - galvanisch getrennte RS232 Schnittstelle (ob TTL oder RS232 muss noch geklärt werden) - Power, Running, Error LED - Analoge Solldrehzahlvorgabe (nicht galvanisch getrennt, aber RC Tiefpass + Optokoppler vorgesehen, so dass man galvanisch getrennt eine PWM einspeisen kann) Mehr eigentlich nicht, außer es ist noch viel Platz.
Ich stimme Benedikt K. (benedikt) voll zu! -Galvanische getrennte RS232 (3xOptotoppler, Rx,Tx,OE) - STatus LEDs, - Möglichkeiten zu Einfacher Bedienung (Start,Stopp..), - PWM wäre denkbar. @ Michael Waiblinger (wiebel42): Den Spannungswandlern kannst du vertrauen, aber eine galvanische Trennung von RS232 würde ich trotzdem bevorzugen.
Frage zur galvanischen Trennung: Wir benötigen dann eine galvanisch getrennte Spannung, oder soll das ganze einfach nur als TTL ausgeführt werden, und die 5V müssen von extern kommen (Was bei einem MAX232 dumm wäre) ? @ lippy Soll ich schonmal mit dem Prozessor Board anfangen oder erst auf dich warten ?
Angehängte Dateien:
-

power_part8.PNG
18 KB

>e galvanisch getrennte Spannung, Ja, ich würde drei schnelle Optokoppler und so einen fertigen 1W DC/DC Wandler vorschlagen: http://www.reichelt.de/?SID=30UtGucKwQAR4AAGW-cpk19f64ec607fbda930e484abb79843c80;ACTION=3;LA=4;GROUP=D481;GROUPID=595;ARTICLE=35024;START=0;SORT=artnr;OFFSET=1000 >Prozessor Board anfangen Kannst du gerne tun. Im Anhang ein aktuelles Bild (Die Änderungen von heute sind noch nicht drin). Da siehst ja in etwa, wie die Aufteilung ist. Die Anschlussbelegung des Verbinders (Leistungspl.Steuerteil) stimmen wir noch ab...
Wir haben da ein kleines Problem: Es sind nur 4 ADCs frei, wir brauchen aber 6: - ZK Spannung - Strom - 3x Phasenstrom - analoger Sollwert Hat jemand eine Idee ? Anderer µC, externer ADC (dazu fehlen aber auch die Pins) ?
>- ZK Spannung >- Strom >- 3x Phasenstrom könnte über ein externer AD-Wandler (per SPI) in den µC AD7908/AD7918/AD7928 ADS8344 ADS1211 ... Somit sind die lokalen (internen) ADC für Bedienung da...
Die Frage ist wirklich, ob man ein Isolation braucht für die RS232. Im Prinzip können keine "gefährliche" Spannungen übertreten, wenn nichts schief läuft. http://datasheets.maxim-ic.com/en/ds/MAX3250.pdf wäre eine Alternative, die isolierte VCC könnte man mit USB-Kabel vom PC herziehen. Für den externen ADC, wenns in dann braucht, könnte man einen per SPI anschliessen oder einen externen Analogmux vorsehen.
Jack Braun wrote: >>- 3x Phasenstrom > > Wird über 3 Komparatoren verglichen --> digitale Eingänge. Welchen Sinn hat das ? Reicht es nicht die Phasenspannungen über Komparatoren zu messen ? Wäre es eine Lösung die internen Komparatoren per Jumper entweder an die Phasenspannungen oder an die Phasenströme zu legen ? Beides zusammen ist irgendwie doppelt und unnötig, oder ? Matthias L. wrote: > > könnte über ein externer AD-Wandler (per SPI) in den µC > Somit sind die lokalen (internen) ADC für Bedienung da... Die (hardware) SPI Schnittstelle ist belegt (durch den UART), man müsste die ADC also per Software SPI abfragen. Insgesamt sind noch 9 Pins frei, davon sind 4 ADCs + 1 ADC via differentiellem Verstärker. Es wird also definitiv knapp.
@Manuel A: Das wäre denkbar. Aber wenn man kein USB nimmt, also nur RS232, dann braucht man die Spannung schon. Mir schwebt bei der RS232 allerdings folgendes vor: Der von mir geforderte 3te Pin (OE) soll folgendes tun: Ist dieser passiv, so die Tx-Leitung (also die, die RS232-Pegel hat) abgeschaltet (high-Z) werden. Also etwa so: µC_RxD_Pin <= (Optokoppler) <= MAX232 <= -------------------------+ (selber) | (Pin ) µC_TxD_Pin => (Optokoppler) => MAX232 o.ä. => TristateTreiber => SubD-9pol. ^ (an OE-Pin) | µC_irgendein_Pin => (Opto) => --------------------+ Vorteil: Ich kann Senden und Empfangen auf der selben Leitung. Somit können (wenn dann später mehrere Module parallel liegen) alle einfach auf dem Bus horchen. Sobald einer (per Knotennummernschalter - VORSEHEN!) angesprochen wurde (wird im Paket mit übertragen =>Protokoll) kann er seine Tx aktivieren und senden/antworten... Das geht wunderbar mit dem MPCM des UARTs..
Ok, ich kenne mich mit Atmel uC's nicht so aus, komme eher von der PIC-Architektur. :-P Man könnte natürlich auch die UART per Software lösen. Die Frage ist, was schneller laufen muss, das SPI oder die UART. Man könnte vielleicht auch UART und SPI muxen. Auf SPI schalten für den ADC und zurück zur UART wenn man seriell kommuniziert.
>Welchen Sinn hat das ? Reicht es nicht die Phasenspannungen über >Komparatoren zu messen ? Ich wollte nur sagen, daß für die Kommutierung die Auswertung der Phasenspannung über die Komparatoren reicht. Was soll die Auswertung des Phasenstromes bringen?
>Was soll die Auswertung des Phasenstromes bringen? Erstmal nix. Nur Info. So nach dem Motto: Wer hat, der kann.. >UART per Software lösen Ne ne.. das MUSS beides (UART+SPI) in Hardware sein.. Welche Pins werden denn für die Ansteuerung der FETs zwingend benötigt? Sind das die PSCout..?? Wenn ja, welche von den acht? Oder reichen da drei? Weil es sind doch eh immer nur zwei Transistoren an, oder?? Wenn ja, dann könnte doch die Umschaltung High/low-side per general-purpose-IO machen, oder hab ich jetzt nen denkfehler?? Damit wir SPI und UART als Hardware nehmen können.. Oder falls das Pin-mäßig ne passt, warum dann nicht nen anderen Atmel?
Ich meinte USB nur als Spannungsquelle nutzen, um die PC-seitige Speisung des Optos zu lösen. Wieviele ADC's fehlen nun? Man könnte über die UART parallel den PC und einen zweiten Kontroller zur Datensammlung ansprechen. Würde einfach eine Adressierung nötig machen. Frei nach dem Motto: Dual Core, do more!
Matthias L. wrote: >>Was soll die Auswertung des Phasenstromes bringen? > Erstmal nix. Nur Info. > So nach dem Motto: Wer hat, der kann.. Wenn die Pins nicht ausreichen, würde ich einfach die Phaenströme weglassen. Wiso 3x Ströme messen, die alle 3 gleich sind ? >>UART per Software lösen > Ne ne.. das MUSS beides (UART+SPI) in Hardware sein.. Ich würde lieber die internen ADCs verwenden. Externe ADCs + Mux sind nicht nur aufwendiger anzusteuern, sondern auch langsamer. > > Welche Pins werden denn für die Ansteuerung der FETs zwingend benötigt? > Sind das die PSCout..?? Wenn ja, welche von den acht? Oder reichen da > drei? Jeweils PSCx0 und PSCx1. Der µC hat 3 Kanäle, einen anderen Pin verwenden kommt garnicht in Frage. > Oder falls das Pin-mäßig ne passt, warum dann nicht nen anderen Atmel? Wenn einen anderen Controller, dann einen MotorControl dsPIC oder sowas in der Richtung.
Angehängte Dateien:
-

pwm3x_v02.gif
22 KB
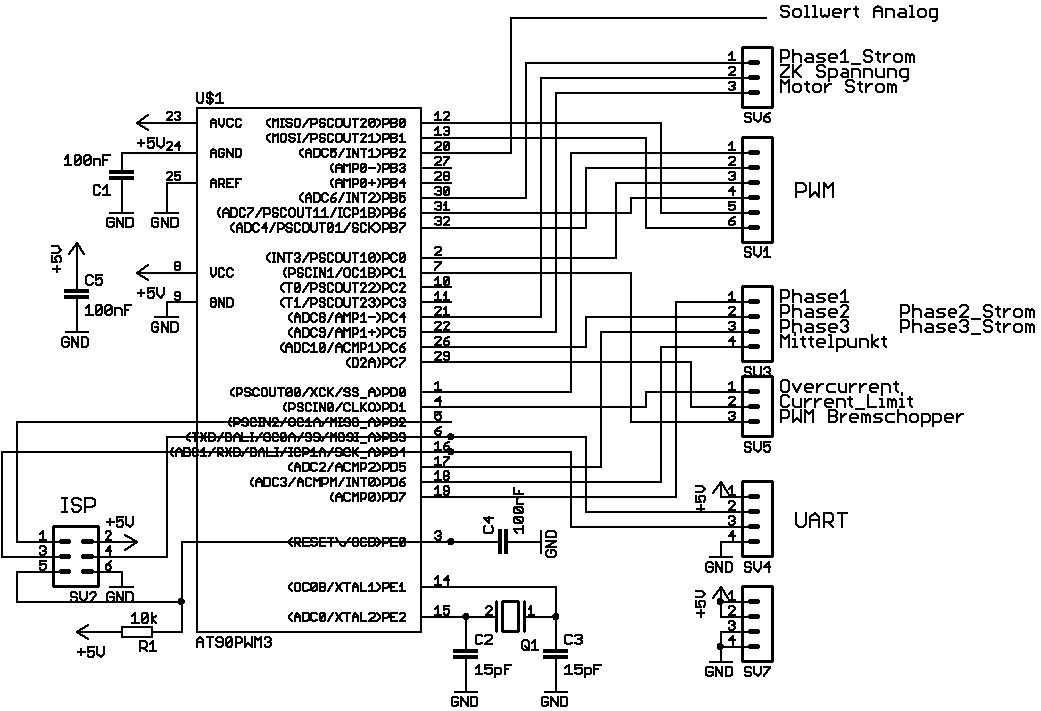
Hier mal ein Vorschlag wie man mit den vorhandenen Pins auskommen könnte: Über Jumper kann man zwischen Phasenstrom und Phasenspannung auswählen, ein Phasenstrom steht immer zur Verfügung (was normalerweise auch reichen sollte, wenn man nicht die Kommutierung über den Strom macht, da ja alle 3 Ströme gleich sein sollten (bis auf die Phasenlage)).
Also das mit der Gesamtstrommessung an Punkt C ist layout-mäßig ziemlich beschissen... ;-(
U-I-Messung wäre interessant um eine Impedanzmessung aller Motorspulen durchzuführen. Da wäre es schon praktisch wenn man an jeder Phase alles Messen könnte. Aber ja, gewisse Tradeoffs muss man halt machen.
Reicht dazu eine Spule nicht aus ? Normalerweise (also bei einem funktionierenden Motor) sollten alle Spulen gleich sein.
Stimmt schon, wenn man alle messen kann, dann könnte man einen richtigen Motorprüfstand bauen damit.
Angehängte Dateien:
-

pwm3x_v03.gif
32 KB
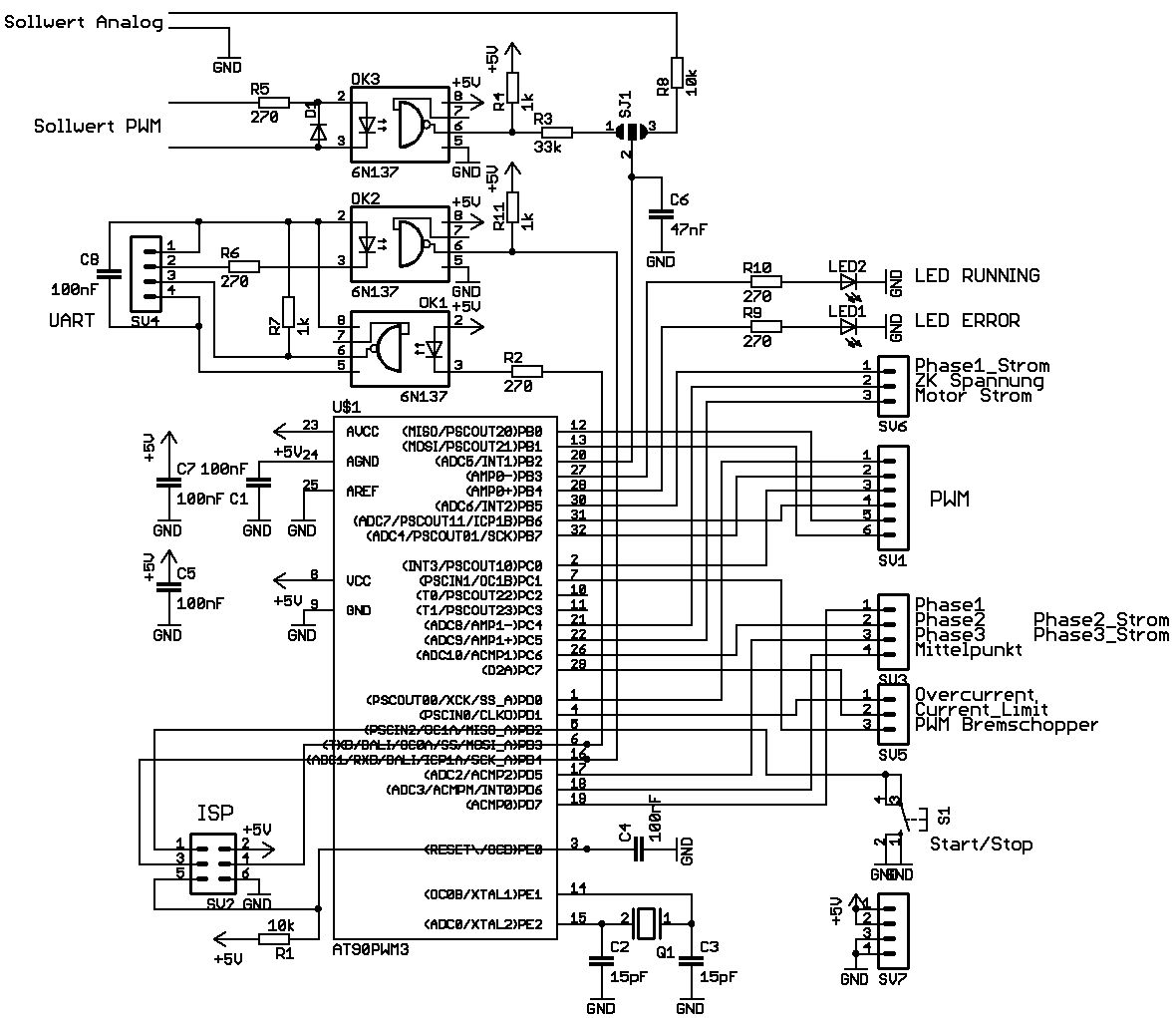
Frage: Ist das so OK, wenn sich Phasenströme und Spannungen die gleichen Pins teilen ? Man müsste dann halt auf der Leistungsplatine Jumper zum Umschalten vorsehen. Und die restlichen Pins, kann ich das so lassen ? Das Problem mit dem Bus für den UART hat sich ganz positiv ergeben: Die Optokoppler haben Open Collector Ausgänge, daher kann man die Pins alle parallel schalten. Man muss nur per Software regeln, dass nicht alle gleichzeitig senden.
>Ist das so OK, wenn sich Phasenströme und Spannungen die gleichen Pins >teilen ? Man müsste dann halt auf der Leistungsplatine Jumper zum >Umschalten vorsehen. Ich denke nein. Der µC braucht ja die Messung der Phasenspannung, um im richtigen Moment umzuschalten. Wenn Du dann auf Phasenstrom umstellst, kann er wahrscheinlich nicht richtig laufen. Ich würde die Messung des Phasenstroms bleiben lassen. Wichtig ist doch nur der Gesamtstrom.
Dann sag das mal den anderen... Eine Phase kann man ja messen, aber 3 halte ich für sinnlos. Wobei man auch über die Ströme kommutieren kann, ist dann aber sehr rechneaufwendig.
>Dann sag das mal den anderen... Eine Phase kann man ja messen, aber 3 >halte ich für sinnlos. Selbst den Strom einer Phase zu messen, ist nicht nötig. Welche Information kann man denn daraus gewinnen? Daß eine Wicklung durchgebrannt ist? ;-) Im Netz gibt es unzählige (sehr erfolgreiche) Projekte zu BLCD (oder auch BLMC), bei allen wird zur Motorüberwachung der Gesamtstrom gemessen.
Von mir aus kann man die Phasenströme auch bleiben lassen.
Hier gehts um eine Experimentierschaltung. Dabei fänd ich auch wichtig den Stromverlauf der einzelen Phasen zu sehen. Der Effektiv- bzw Mittelwert der Phasenströme fänd ich weniger spannend. Wäre also ein Shunt pro Phase geschickter ums Oszi dran zu packen...
AVR-User wrote: > Hier gehts um eine Experimentierschaltung. Dabei fänd ich auch wichtig > den Stromverlauf der einzelen Phasen zu sehen. Der Effektiv- bzw > Mittelwert der Phasenströme fänd ich weniger spannend. Wäre also ein > Shunt pro Phase geschickter ums Oszi dran zu packen... Das heisst aber, dass der Shunt differentiel angezapft werden muss. Das würde heissen Differenzverstärker mit OPAMP oder aber eine Differential-Probe, welche die meisten Hobbyelektroniker sicher nicht haben. Oder sehe ich das falsch? Man könnte aber auch die Allegro einbauen und diese manuell mit dem Oszi auslesen oder wie auch immer.
Es geht mir erstmal hauptsächlich darum, dass nicht genügend Pins für die Phasenspannung und den Phasenstrom vorhanden ist. Dass man das ganze zusätzlich extern messen kann ist eher nebensächlich. Ist es also OK, wenn man die 3 Ausgänge der Phasenstromsensoren an eine zusätzliche Stiftleiste führt, und nur eine Phase zum µC ?
Angehängte Dateien:
-

Beschaltung.png
2,6 KB

Hallo Zusammen, in der Application Note AN889 (VF Control of 3-Phase Induction Motors Using PIC16F7X7 Microcontrollers) von Microchip wurde in deren Umrichterprojekt eine etwas aufwendigere Beschaltung des Gate der Leistungstransistoren (in deren Fall IGBT) gewählt. Ist das eine reine Angstbeschaltung, oder ist das auch in diesem Projekt sinnvoll? Nach der Application Note AN-978 von IR müsste (so deute ich den nachfolgenden Satz) noch ein Keramikkondensator parallel zu C5, C8, C12 Increase the bootstrap capacitor (CB) value to above 0.47 µF using at least one low-ESR capacitor. This will reduce overcharging from severe VS undershoot. Grüße Axel
Axel Jeromin wrote: > Hallo Zusammen, > in der Application Note AN889 (VF Control of 3-Phase Induction Motors > Using PIC16F7X7 Microcontrollers) von Microchip wurde in deren > Umrichterprojekt eine etwas aufwendigere Beschaltung des Gate der > Leistungstransistoren (in deren Fall IGBT) gewählt. > Ist das eine reine Angstbeschaltung, oder ist das auch in diesem Projekt > sinnvoll? Bei IGBTs ist diese notwendig, da diese sehr viel langsamer abschalten als Mosfets. Außerdem besitzt der AT90PWM3 eine einstellbare Deadtime, daher können wird auf die Diodemit dem Widerstand in Reihe verzichten. Die Z-Dioden schützt das Gate vor zu hohen Spannungen, was bei uns nur dann passiert wenn sowiso schon was kaputt ist. Der Widerstand ist auch nicht nötig, da der verwendete Treiber keinen Tristate kennt. > Nach der Application Note AN-978 von IR müsste (so deute ich den > nachfolgenden Satz) noch ein Keramikkondensator parallel zu C5, C8, C12 > > Increase the bootstrap capacitor (CB) value to above 0.47 µF using at > least one low-ESR > capacitor. This will reduce overcharging from severe VS undershoot. Eingezeichnet ist ein (Tantal) Elko, der sollte eigentlich einen niedrigen ESR haben. Ein reiner 1µF Keramikkondensator sollte aber auch funktionieren.
@ Benedikt K. Also das mit den Jumpern finde ich immer Mist, falls sowas nötig ist, dann muss sowas per Software gehen..# Naja, hab jetzt den Kopf wieder frei, vielleicht fällt mir am WE nochwas ein. Also für die sechs FETs sind die PSCOUTx0 und PSCOUTx1, ja?
Matthias L. wrote: > @ Benedikt K. > > Also das mit den Jumpern finde ich immer Mist, falls sowas nötig ist, > dann muss sowas per Software gehen..# Wenn aber die Pins dazu fehlen... Und sowas wie Schieberegister möchte ich nicht wirklich verbauen. Einfachste Lösung: Ein Phasenstrom messen, alle anderen nur an eine Stiftleiste führen, damit man von extern messen kann. > Also für die sechs FETs sind die PSCOUTx0 und PSCOUTx1, ja? Ja. PSCOUTx0 sind Highside und PSCOUTx1 sind Lowside. Frage: Hardwaremäßige Überstromabschaltung ?
Also schöner wäre die Strangstrommessung natürlich schon mit eigenen ADCs aber leider sind da ja doch einige belegt, evtl. könnten wir ja PSCOUT22/23 nutzen um entweder noch ADC4/7 oder MISO (PSCOUT20/21) für einen externen ADC freizubekommmen, oder spricht da etwas dagegen? Ich will die nicht nur extern messe, bin aber flexiebel was die beschaltung alternativ angeht, ich hab auch nix gegen ein wildes rumverdrahten der Stiftleisten, auch wenn natürlich eine Sotwarelösing eleganter wäre, aber wir haben nunmal nur ein paar Pins, einen slave uC fände ich übertrieben, wäre aber natürlich auch noch eine Lösung. Ich will auf jeden Fall alle drei Phasenströme haben (mit Jumpern kann ich leben) Auch könnte man die Sollwertvorgabe alternativ auf eine Phase routen, da man ja auch über UART sollwerte vorgeben kann. Hardware Überstromabschaltung können wir uns sparen, da die Sensoren eine Bandbreite von 80kHz haben, können wir auch in Software reagieren, wobei es natürlich nett wäre den Geeamtstrom auch an einem Komperator zu haben, aber da haben wir keinen mehr über. [edit: Was haltet ihr eigentlich von diesem FTDI USB-TTL teil, das könnte uns auch mit 5V versorgen, in der Testphase.
Michael Waiblinger wrote: > Also schöner wäre die Strangstrommessung natürlich schon mit eigenen > ADCs aber leider sind da ja doch einige belegt, evtl. könnten wir ja > PSCOUT22/23 nutzen um entweder noch ADC4/7 oder MISO (PSCOUT20/21) für > einen externen ADC freizubekommmen, oder spricht da etwas dagegen? Für einen externen ADC benötigt man mindestens 4 Leitungen, das SPI muss man per Software machen, schnell wird das mit Sicherheit also nicht. > Ich will auf jeden Fall alle drei Phasenströme haben Was hast du mit dem Strömen vor ? Nur zur Info oder für die Kommutierung ? > Hardware Überstromabschaltung können wir uns sparen, da die Sensoren > eine Bandbreite von 80kHz haben, können wir auch in Software reagieren, > wobei es natürlich nett wäre den Geeamtstrom auch an einem Komperator zu > haben, aber da haben wir keinen mehr über. Überstromabschaltung rein per Software ist mist, denn die ist viel zu langsam. Der einzige Kompromiss: PSCIN legt hardwaremäßig alle PWM Ausgänge auf Low. > Was haltet ihr eigentlich von diesem FTDI USB-TTL teil, das könnte uns > auch mit 5V versorgen, in der Testphase. Spricht nichts dagegen, ich werde aber auch einen MAX232 vorsehen, der wahlweise bestückt werden kann.
Nagut, ich glaube zwar das wir da einiges so schnell angegangen sind, dass uns jetzt ein Verschnaufpäusschen ganz gut tut auch um einiges sacken zu lassen, aber dann will ich mal. Benedikt K. wrote: > Für einen externen ADC benötigt man mindestens 4 Leitungen, das SPI muss > man per Software machen, schnell wird das mit Sicherheit also nicht. Deswegen meinte ich ja das wir evtl. die Anschlüsse frei bekommen könnten. > Was hast du mit dem Strömen vor ? Nur zur Info oder für die Kommutierung > ? Mit Glück und Tricksen würde ich darüber auch gerne mal kommutieren, zumindest wenn es geht und die Sensoren nicht zu langsam sind. Ansonsten schmeissen wir die einfach raus, egal. Hauptsache es dreht sich. > Überstromabschaltung rein per Software ist mist, denn die ist viel zu > langsam. Der einzige Kompromiss: PSCIN legt hardwaremäßig alle PWM > Ausgänge auf Low. Wie gesagt unser Sensor ist das langsamste Glied der Kette (80khz-12µs) von daher reisst eine Hardwareabschaltung das auch nicht mehr raus. > Spricht nichts dagegen, ich werde aber auch einen MAX232 vorsehen, der > wahlweise bestückt werden kann. Super, dann auch einen richtigen Sub-d Anschluss?
Mal ne ganz andere Frage, wegen dem Chopper. Wie steuert man den eigentlich, muss da wirklich eine PWM sein? Macht man den nicht einfach an wenn U_ZK > U_h und aus wenn U_ZK < U_l ist? Mit U_l/h als willkürliche Grenzwerte. Also geht das nicht einfach direkt über Interrupts?
Michael Waiblinger wrote: > Mit Glück und Tricksen würde ich darüber auch gerne mal kommutieren, > zumindest wenn es geht und die Sensoren nicht zu langsam sind. > Ansonsten schmeissen wir die einfach raus, egal. Hauptsache es dreht > sich. Also wäre es OK, wenn ich diese als Alternative zur Spannungsrückführung verwende ? >> Überstromabschaltung rein per Software ist mist, denn die ist viel zu >> langsam. Der einzige Kompromiss: PSCIN legt hardwaremäßig alle PWM >> Ausgänge auf Low. > Wie gesagt unser Sensor ist das langsamste Glied der Kette (80khz-12µs) > von daher reisst eine Hardwareabschaltung das auch nicht mehr raus. Ich würde es bevorzugen, wenn ein Shunt oder ein schneller Stromsensor über einen Komparator ein Signal an PSCIN legen würden. Damit könnte man die Endstufe stilllegen und so die Mosfets bei einem Kurzschluss retten. Bevor ich irgendwelche Pins festlege möchte ich auch mal andere Meinungen hören, da ich ungern am Ende daran schuld sein möchte wenn es nix wird. >> Spricht nichts dagegen, ich werde aber auch einen MAX232 vorsehen, der >> wahlweise bestückt werden kann. > Super, dann auch einen richtigen Sub-d Anschluss? Wenn Platz ist, ansonsten als 3 polige Stiftleiste.
Benedikt K. wrote: > Michael Waiblinger wrote: > >> Mit Glück und Tricksen würde ich darüber auch gerne mal kommutieren, >> zumindest wenn es geht und die Sensoren nicht zu langsam sind. >> Ansonsten schmeissen wir die einfach raus, egal. Hauptsache es dreht >> sich. > > Also wäre es OK, wenn ich diese als Alternative zur Spannungsrückführung > verwende ? Ja ok das geht schon, aber wenigstens eine Phase zum nebenhermessen. >>> Überstromabschaltung rein per Software ist mist, denn die ist viel zu >>> langsam. Der einzige Kompromiss: PSCIN legt hardwaremäßig alle PWM >>> Ausgänge auf Low. >> Wie gesagt unser Sensor ist das langsamste Glied der Kette (80khz-12µs) >> von daher reisst eine Hardwareabschaltung das auch nicht mehr raus. > > Ich würde es bevorzugen, wenn ein Shunt oder ein schneller Stromsensor > über einen Komparator ein Signal an PSCIN legen würden. Damit könnte man > die Endstufe stilllegen und so die Mosfets bei einem Kurzschluss retten. Hmmm, ja da musst du mit lippy reden, der ist ja auf die Sensoren so angesprungen. > Bevor ich irgendwelche Pins festlege möchte ich auch mal andere > Meinungen hören, da ich ungern am Ende daran schuld sein möchte wenn es > nix wird. Ich denke das sah schon sinnvoll aus bisher. >>> Spricht nichts dagegen, ich werde aber auch einen MAX232 vorsehen, der >>> wahlweise bestückt werden kann. >> Super, dann auch einen richtigen Sub-d Anschluss? > > Wenn Platz ist, ansonsten als 3 polige Stiftleiste. Zwei mal 5 polig VCC-GND-RX-TX-OE, einmal vor und einmal hinter dem MAX
der lippy ist diese woche dienstlich bei den eidgenossen, und wir hier wohl wenig zeit haben.. aber ich gucke trotzdem immer mal ins forum rein..
Matthias L. wrote: > der lippy ist diese woche dienstlich bei den eidgenossen, und wir hier > wohl wenig zeit haben.. aber ich gucke trotzdem immer mal ins forum > rein.. Wir waren bisher aus sehr schnell und effektiv bei der Sache und da es ja auch Spass bleiben soll ist es sicher kein Fehler das auch mal etwas ruhiger anzugehen. Kein Stress. ;)
Angehängte Dateien:
-

BLDC1.png
17 KB

So ich konnte es jetzt doch nicht lassen und musste mich auch endlich mal wieder an eagle setzen, ich brauch ja auch Übung, leider hab ich noch nicht raus wie man eigene Bauteile bastelt (IR2110), ausserdem weiss ich auch noch nicht wie ich SMD teile auf die Bottom seite bekomme (hab auch nur die freie Version). Ich hab jetzt alle Shunts als Leiterbahnen ausgeführt. Gesamtstrom doch in Masse, ist aber auch leicht nach oben zu holen. die Phasenströme sind etwas trickiger mit den Leiterbahnen und Widerständen (ich hoffe ihr durchschaut das im Layout, ich wage nicht das Schematic zu veröffentlichen ;). Natürlich hab ich nicht die Designrules von lippy berücksichtigt, soll ja auch nur eine Idee sein. Also keine Panik ich will das jetzt nicht übernehmen, aber reinstellen will ich's doch mal. -wiebel
Was hast du den bei den Eidgenossen zu tun? Bin nämlich einer von denen :-P
@ Manuel A. (geebee711): Na dann gruezi.. Mein Arbeitgeber in Dtl ist nur eine Zweigstelle mit Muttergesellschaft im Zürcher Oberland. Und genau im Stammwerk bin ich diese Woche. Ist in der Nähe von Rapperswil... @ Michael Waiblinger Hab schon Angst bekommen, dass du mir die Arbeit wegnimmst.. ;-)) Was hältst du/ihr eigentlich davon, keinen AT..PWM.. einzusetzen, sondern stattdessen einen MegaXX? Weil die Motor-PWM muss doch sowieso nicht so schnell sein, und das würden die megas auch hinbekommen. Hätte den Vorteil, dass wir mehr Pins/Schnittstellen hätten...
Matthias L. wrote: > Was hältst du/ihr eigentlich davon, keinen AT..PWM.. einzusetzen, > sondern stattdessen einen MegaXX? Weil die Motor-PWM muss doch sowieso > nicht so schnell sein, und das würden die megas auch hinbekommen. Hätte > den Vorteil, dass wir mehr Pins/Schnittstellen hätten... An sich würde es funktionieren, allerdings haben die PWM AVR auch ihr Vorteile: Die 3 PWM Kanäle sind gekoppelt, sie sind also alle synchron. Zusätzlich gibt es sehr viele Modi wie man die PWM Kanäle betreiben kann. Außerdem ist der ADC schneller usw, was nützlich sein könnte.
und man kann die Deadtime der PWMs sehr gut gebrauchen. Das ginge zwar auch mit konventionellem AVR aber der AT90PWM macht das so nebenbei selbst bei Änderung der PWM Frequenzen. Auch die Kopplung der ADC und Analog Comparatoren an diese PWM ist ne andere. Die wenigsten AVRs haben zb. 16 Bit Timer die 4 OCR Register unterstützen. Gruß Hagen
Ok wie ware es wenn wir doch zwei Controller verbraten, die sind ja schliesslich nicht so teuer und die Beiden dann über SPI zu einer Einheit zu verschmelzen. Wie hoch wäre dann der Aufwand?
>eiden dann über SPI zu einer
Geht ja nicht, weil SPI nicht geht, weil dort irgendwelche PWM-Pins
draufliegen.
Das ist ja der Scheiß.
Sonst ätte ich über SPI AD-Wandler angekoppelt...
Dieser AT..PWM.. hat sein PWM-Ausgänge so beschissen gelegen, dass alles
Interessante (uart,spi) nicht mehr geht...
Matthias L. wrote: > Dieser AT..PWM.. hat sein PWM-Ausgänge so beschissen gelegen, dass alles > Interessante (uart,spi) nicht mehr geht... Stimmt nicht, das einzige was nicht geht ist SPI und UART gleichtzeitig. Eines von beiden funktioniert zusammen mit PWM.
Benedikt K. wrote: > Matthias L. wrote: > >> Dieser AT..PWM.. hat sein PWM-Ausgänge so beschissen gelegen, dass alles >> Interessante (uart,spi) nicht mehr geht... > > Stimmt nicht, das einzige was nicht geht ist SPI und UART gleichtzeitig. > Eines von beiden funktioniert zusammen mit PWM. Genau darauf wollte ich hinaus, der hat ja zwei SPIs, und wenn wir das UART über einen zweiten uC schleusen hätten wir viel mehr Möglichkeiten. Die Idee das Ganze als angehenden Motormesstand zu betrachten gefällt mir eigentlich ganz gut, und wir könnten dann noch einen AD wandler extra haben. Durch den zweiten Controller könnte das UI evtl. auch nur aus ein paar Tasten und dem Display bestehen.
Mir persönlich gefällt die 2 Controller Lösung nicht so ganz. Ich würde dann lieber einen anderen Motor Controller verwenden (dsPIC, M16C usw.) oder aber das ganze so auslegen, dass alles mit einem AT90PWM lauffähig ist (dieser also nur die wichtigsten Funktionen bekommt, wie Motorsteuerung, Bremschopper usw.) und optional ein zweiter Controller verwendet werden kann, der den Rest macht.
Ok noch einen neue Idee. Wie wäre es wenn wir das UI-Modul doch über SPI anbinden dann könnten wir noch einen AD Wandler mit ranhängen. Das würde natürlich dann auch bedeuten, dass wir erst RS323 Haben wenn die UI steht.
Wie wäre es, die ganze ansteuerung so zu machen wie erst geplant. Um jetzt dadraus einen "motormessstand" zu bauen gibt es noch n sandwitch teil, der nochmal oben drauf kommmt, der dann gemütlich zeit und resourcen hat um messungen durchzuführen?
Genau, das wäre die optimale Lösung: Vielleicht könnte man auf die Leistungsplatine direkt einen AT90PWM packen, und den dann via SPI oder UART mit der anderen Platine verbinden, die dann zusätzlich noch alle Spannungen und Ströme bekommt. Wer das nicht braucht, lässt diese einfach weg.
Angehängte Dateien:
-

power_part9_10_11.PNG
64 KB

{kind=link}
{kind=link}
Sind hier alle eingeschlafen?? Hab mal a bizerli weitergemacht.. Werd als nächstes das Netzteil ZK=>5V/12V einpflegen. Welchen Temperatursensor empfehlt ihr? Gibts da was zum auf KK schrauben? Welche SPannungen sollen gemessen werden und wie??
Matthias L. wrote: > Sind hier alle eingeschlafen?? Keine Ahnung, ich bin noch da... > Welchen Temperatursensor empfehlt ihr? Gibts da was zum auf KK > schrauben? Es reicht eigentlich irgendein billiger, z.B. NTC10k (oder so ähnlich) von Reichelt. > Welche SPannungen sollen gemessen werden und wie?? Das sollte vielleicht mal geklärt werden, nicht dass du am Ende die Platine nochmal umdesignen musst. PS: Sind die Abstände zwischen den Leiterbahnen nicht etwas eng, oder ist die Platine nur so groß und es täuscht ?
>> Welche SPannungen sollen gemessen werden und wie?? >Das sollte vielleicht mal geklärt werden, nicht dass du am Ende die >Platine nochmal umdesignen musst. Dann schreibt mal eure Meinungen... >Sind die Abstände zwischen den Leiterbahnen.. DIe Abstände sind so groß/klein, das ich es erfahrungsgemäß im Keller herstellen kann. Und da wir keine so hohen Spannungen (Netzspannungen) verwenden, müssen die Abstände auch nicht so groß sein.. Diskussion auch über icq# 254-269-548
Hallo, bin gerade auf das Projekt gestoßen - interessant, da ich gerade auch an so etwas arbeite. Soll das Projekt denn auch für sinusförmige Ansteurung geeignet sein? Für mein Projekt ist das erforderlich, da ich einen Motor mit sinusförmiger EMK ansteuern will. Mein jetziger Prototyp verwendet einen ATMEGA88, der hat sich als zu langsam herausgestellt, wenn eine Auswertung des Motorstroms zur Positionsbestimmung erfolgen soll. Das ist nicht so einfach für sinusförmige EMK im Gegensatz zu trapezförmiger. Das ist die Rede von erweiterten Kalman-Filtern und anderen ziemlich rechenintensiven Algorithmen - ich blick da nicht ganz durch, Plan aber schon ein Redesign mit einer Leistungsfähigeren CPU, wahrscheinlich SAM7 oder ADUC702x wegen des schnellen und genauen ADCs. Gibts hier interesse das Projekt dahingehend zu verändern um auch anspruchsvollere Algorithmen zu erproben? Gruß Stefan
Stefan V. wrote: > Gibts hier interesse das Projekt dahingehend zu verändern um auch > anspruchsvollere Algorithmen zu erproben? Eigentlich spricht nichts dagegen: Da wir das ganze sowiso zwischen Leistungsteil und µC Platine trennen, kann man problemlos einen anderen µC verwenden, wenn man die µC Platine anpasst. Was spricht eigentlich gegen die dsPICs ? Die sind meiner Meinung nach schneller als die ARMs und optimal für solchen Aufgaben, obwohl sie nur mit max 40MIPs laufen. Für die Kommutierung via Phasenstrom gibt es auch entsprechende Application Notes bei Microchip.
Benedikt K. wrote: > Was spricht eigentlich gegen die dsPICs ? Die sind meiner Meinung nach > schneller als die ARMs und optimal für solchen Aufgaben, obwohl sie nur > mit max 40MIPs laufen. Also ich will ja jetzt nicht in eine Diskussion - mein Prozi ist besser als deiner - einsteigen, ist mir auch letztlich egal, hauptsache ich muß mich möglichst wenig mit den Innereinen und Eigenheiten rumschlagen und kann das Teil in C programmieren. Daher ist mir eine RISC CPU lieber als ein DSP und wenn es da kostenlose, vorzugsweise open source Software gibt ziehe ich das den Herstellertools gegen Dollars vor. > Für die Kommutierung via Phasenstrom gibt es auch > entsprechende Application Notes bei Microchip. Konnte keine entsprechenden App. Notes finden. Es geht um sensorlose Kommutierung.
Stefan V. wrote: > Daher ist mir eine RISC CPU lieber als > ein DSP und wenn es da kostenlose, vorzugsweise open source Software > gibt ziehe ich das den Herstellertools gegen Dollars vor. Kein Problem, es war nur so eine Idee, da mich ein ARM7 als DSP ziemlich enttäuscht hat. Dann musst du allerdings eine eigene µC Platine basteln. >> Für die Kommutierung via Phasenstrom gibt es auch >> entsprechende Application Notes bei Microchip. > Konnte keine entsprechenden App. Notes finden. Es geht um sensorlose > Kommutierung. Die Suche ist bei denen eine Katastrophe. Einmal hier: http://ww1.microchip.com/downloads/en/AppNotes/01083a.pdf und dann noch hier: http://ww1.microchip.com/downloads/en/AppNotes/01078A.pdf
>leider hab ich noch nicht raus wie man eigene Bauteile bastelt (IR2110) Ganz einfach, man öffnet eine Lib und erzeugt (falls nicht schon vorhanden) das Package und Device und zum Schluß das Symbol, wo man Package und Device miteinander verbindet. Ich habe mir allerdings ne neue Lib erstellt und dann aus vorhandenen die Packages rüber gezogen. Dann kann man die orginalen nicht versauen :-) >weiss ich auch noch nicht wie ich SMD teile auf die Bottom seite bekomme Auch ganz einfach, man gibt den befehl "mirror" ein und klickt auf das Bauteil, welches auf die Buttomseite soll
Warum geht es hier nicht weiter ???? Keiner mehr Intersees an dem Projekt ???
Wie siehts aus? gibts schon ein ergebnis zu diesem projekt?
Tja, das war ein interessantes Projekt - warum ist es eingeschlafen? Matthias, existieren die Eaglepläne der Power Stage noch? Sowas suche ich. Zwar würden mir FET's in SO8 reichen, aber es wäre ein Anfang... Grüßlis Jörg
Hier gehts weiter: http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en544879&redirects=mchv :-) Sowas hätte ich gern ...
Ich habe einen Festplattenmotor mit drei Anschluessen und möchte damit experimentieren. Habt ihr sinnvolle Vorschläge?
Hi schrieb: > Ich habe einen Festplattenmotor mit drei Anschluessen und möchte > damit experimentieren. Habt ihr sinnvolle Vorschläge? 1) keinen Thread von 2007 kapern 2) den Thread wenigstens mal lesen 3) Festplattenmotore sind BLDC die ihre Kommugierungszeitpunkte über die auf den Fesgplattendcheiben aufgezeichneten Sektormarken erhalten. Ohne Leseköpfe wird das also nichts mit dem in der Fesgplattenelektronik enthaltenen 3-Phasen Treiber. Es bleibt nur, entweder selbst einen Encoder per Hallsensor und Magnetplatte oder Lichtschranke und Schlitzscheibe an die Motorachse anzuflanschen, oder einen der modernen und ungleich schwerer aufzubauenden sensorless BLDC Treiber zu verwenden, einen der keinen Motor-Sternpunktanschluss braucht. Kurz gesagt: nein, DU kannst den Motor nicht ans Laufen bringen. Er hat übrigens sowieso nicht viel Kraft, lohnt als Motor also kaum, zudem eine unnütz hohe Drehzahl.
Das ist mir viel zu pauschal und demnach auch voellig falsch.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.