Hallo zusammen, ich sehe immer wieder zu bezahlbaren Preisen Rolladenmotoren mit dem SMI-Interface. Scheint ja irgendsoeine rein deutsche Nischenentwicklung zu sein (siehe Herstellerliste auf www.smi-group.com). Ähnlich wie bei EIB finde ich bei Google nirgendwo eine anständige Spezifukation des Busses, Übertragungsprotokolle oder ähnliches. Ich muss eine Rolladensteuerung relaisieren, und unser Architekt hat bereits einen Sack voll SMI-Rolladenmotoren "Dunkermotoren D370" bestellt, weil man die notfalls auch einfach mit 2 Tastern betreiben kann. Eine Steuerung dazu (wo man den Bus-Traffic mal mit einem Scope anschauen könnte) habe ich leider nicht. Hat hier schon jemand Erfahrungen mit SMI ? Bzw. kann wer eine einfache (= billige) Steuerung empfehlen, so daß ich dann das Protokoll rausmessen kann ? Auf der smi-group Homepage sind ein paar Interfaces gelistet, jedoch keine (sinnvollen) Bezugsquellen - und die Hersteller verweisen nur auf irgendwelche Elektroinstallationsbetriebe, und nicht auf Händler, wo man so eine Steuerung kaufen kann. Für jeden Hinweis wäre ich sehr dankbar ! -Michael
SMI ist eine gute Wahl. als interface bietet sich dieses an: http://standard-motor-interface.com/wp-content/uploads/dataSheets/080229-SELVE%20Interface_RS232-SMI_TS35_Rev-1-2.pdf einfach bei selve anrufen, kostet 150.- wenn ich mich recht erinnere. Alternativ: KNX SMI-Gateway von zb Becker. Das Protokoll ist sehr einfach, wenn auch etwas verwirrend durch die Adressierung über Hersteller oder Adresse. Aber die jeweiligen Bits findest du schon raus mit etwas Geduld und dem SMI-easyMonitor (http://www.smi-group.com/ unter Downloads) Die Prüfsumme ist -((Summe der Bytes) % 256) (Zweierkomplement) hilfreich ist auch das Plaungshandbuch: http://standard-motor-interface.com/wp-content/uploads/110921-SMI_Planungshandbuch_A4.pdf
Hallo Karl, danke für die schnelle Info. >als interface bietet sich dieses an: >http://standard-motor-interface.com/wp-content/upl... >einfach bei selve anrufen, kostet 150.- wenn ich mich recht erinnere. Wenn das Teil mit dem Monitor geht, dann kann ich ja bald mit dem Messen anfangen. Hintergrund: Ich habe schon eine recht umfangreiche selbstgebaute Haussteuerung mit I2C als Bus (klappt mit nirdrigen Übertragungsraten prima), und würde mir dann dazu gerne entsprechende günstige Adapter mit nem ATTiny oder kleinem ATMega drin bauen. -Michael
ja, du kannst mit dem easyMonitor per rs232 interface auf den bus zugreifen. ich würde an deiner stelle SMI-hardware nicht selbst bauen, sondern zur steuerung eben dieses interface nutzen. falls du doch ein SMI-interface selbst bauen möchtest solltest du dich mal an die SMI-group wenden, evtl schicken die dir den schaltplan und auch die befehle zur privaten verwendung zu. es gab auch irgendwo mal eine grobspezifikation mit den befehlen...
Ich hab grad mal bei Selve angerufen, und versucht, so ein TS35 zu bekommen. Irgendwie hatte ich den Eindruck, daß die das gar nicht einzeln verkaufen wollen, sondern nur an Leute, die schon Motoren bei denen gekauft haben. Es war ein zähes Ringen, bis ich dem Verkäufer klargemacht hatte, daß ich dafür keinen Support nachher haben will, sondern das zum rumspielen brauche. >falls du doch ein SMI-interface selbst bauen möchtest solltest du dich >mal an die SMI-group wenden, evtl schicken die dir den schaltplan und >auch die befehle zur privaten verwendung zu. Na anfragen kann ich auf jeden Fall mal. Aber mit nur rein privater Verwendung will ich nicht behaupten; wenn das Interface kostengünstig realisiert werden kann, wird es mit Sicherheit auch einen Markt dafür geben. Ich fürchte, dai ist wie bei den Kerlen von der EIB-Verschwörung; wer nicht in dem Club ist, kriegt keinerlei verwertbare Infos. (übrigens ein Grund, warum ich mich weigere, irgendwas mit EIB anzufassen...) -Michael
Karl schrieb: > Die Prüfsumme ist > > -((Summe der Bytes) % 256) > > (Zweierkomplement) @Karl: woher hast du diese Info? Kennst du noch mehr Details zum Protokoll? Was ich bis jetzt gesehen habe: 1 Byte Adresse: immer 2 Bit für Hersteller bzw Slave 1 Byte Aktion eventuell Zusatzdaten zur Aktion (zb 2 Byte Position) 1 Byte Prüfsumme werd mir das noch genauer anschauen im esayMonitor und mit PortMon M.
Michael Buchstaller schrieb: > Na anfragen kann ich auf jeden Fall mal. Aber mit nur rein privater > Verwendung will ich nicht behaupten; wenn das Interface kostengünstig > realisiert werden kann, wird es mit Sicherheit auch einen Markt dafür > geben. Wenn du ein SMI-Produkt verkaufen willst, macht das eh nur Sinn mit SMI-Logo und dafür musst du Mitglied sein. Ich kann mir aber durchaus vorstellen, dass du für private Bastelzwecke ein paar Infos bekommst. Insb. zum Protokoll, aber da bist du ja schon auf dem richtigen Weg. Adressierung brauchst du nicht, kannst du mit dem easyMonitor machen. > Ich fürchte, dai ist wie bei den Kerlen von der EIB-Verschwörung; wer > nicht in dem Club ist, kriegt keinerlei verwertbare Infos. > (übrigens ein Grund, warum ich mich weigere, irgendwas mit EIB > anzufassen...) Nein, da die Verwaltung der SMI-group im Kern nur aus zwei Personen besteht im Gegensatz zu der "Behörde" Konnex.
Hallo, Habe jetzt gerade erst mal in SMI-Motoren und Steuerung von Selve investiert. Allerdings interessiere ich mich auf Dauer auch an einer eigenen Steuerung. Irgendwie entspricht die "fertige" nicht ganz meinen Vorstellungen/Ansprüchen. Vielleicht kann ich mich ja an der Entwicklung beteiligen. Gruß IngoF
ich habe gerade einen Ausdruck aus einem Dokument von elero gefunden, da sind alle Befehle mit Funktion, Codierung und Blocklänge aufgeführt. Scheint es aber nicht online zu geben. evtl mal da anrufen ...?
Karl schrieb: > ich habe gerade einen Ausdruck aus einem Dokument von elero gefunden, da > > sind alle Befehle mit Funktion, Codierung und Blocklänge aufgeführt. > > Scheint es aber nicht online zu geben. evtl mal da anrufen ...? kannst du das bitte scannen/fotografieren und uns zugänglich machen? Danke
ruf doch einfach bei elero an, die schicken dir das zu.
Karl schrieb: > ruf doch einfach bei elero an, die schicken dir das zu. Karl, könntest Du mir die Blätter denn irgendwie zukommen lassen? Habe schon alle Hersteller von der SMI Webseite durch. An irgendwelche Infos ist nicht dran zu kommen. Vielleicht haben ja auch schon zuviele angefragt... Gruß IngoF
Habe heute einmal bei dem Hr. Stillhard von der SMI-Group angerufen und mich länger mit ihm unterhalten. So wie es aussieht, sollen die Infos nur an Partner und Mitglieder der SMI-Group rausgegeben werden, damit die Qualität der Antriebe und Steuerungen hoch bleibt. Wenn man (wie in meinem Fall) eine Steuerung für SMI-Antriebe bauen will, die auch das SMI-Logo tragen darf, muss das zertifiziert werden. Die Zertifizierung kann man selber durchführen; es gibt dazu einen Fragenkatalog, den man dann mit Meßprotokollen usw. beantworten muss. Mir wurde versprochen, daß ich weitere Infos dazu erhalte, was es denn kostet und welche Verpflichtungen man eingeht, wenn man Partner der SMI-Group werden will. Sobald ich etwas sinnvolles weiss, melde ich mich wieder. -Michael
Karl schrieb: > einfach bei selve anrufen, kostet 150.- wenn ich mich recht erinnere. Also nach meiner Info kostet dieses Teilchen 300EUR. Soweit ich gehört habe befinden sich keine programmierten Bauteile in dem "Ding". Für die benötigten 24 Volt hätte ich mir ein extra Netzteil kaufen müssen. Ich hab mir einen kleinen Prototyp auf Lochraster selber zusammen gestrickt. Wer will kann es gerne als Grundlage nehmen. Die Bauteilauswahl ist nicht gerade die beste. Habe eben, bis auf den DC-DC-Wandler, genommen was ich noch gerade so in der Schublade hatte. Aber für einen Prototyp zum testen ganz OK. Die Bauteile für die Platine kosten komplett geschätze 15 Euro (also ein zwanzigstel des Originals). Die Schaltung etwas erweitert und mit SMD-Bauteilen sollte auch in ein kleines Hutschienengehäuse passen. Wenn man den MASTER-Jumper nicht steckt kann man am bestehenden SMI-Bus mitlauschen und auch einfach dazwischen senden. Durch den Jumper wird die interne Spannung (21V) über einen 1kOhm Widerstand auf den SMI-Bus (I+) gelegt und es kann ohne eine vorhandenen Busmaster gesteuert werden. Ob die Schaltung intern von Selve ähnlich aufgebaut ist kann ich leider nicht sagen. Bei mir funktioniert es jedenfalls Wenn man jetzt ein USB-Serial Kabel von FTDI anschließt das 5 Volt mit mindestens 200mA liefert hat man ein sehr günstiges USB-SMI Interface. Die Schaltung benötigt allerdings geregelte +5V als Stromversorgung Als Alternative würde sich dieses RS485-SMI Interface von Vestamatic anbieten: http://standard-motor-interface.com/wp-content/uploads/dataSheets/120515_Vestamatic_IF_SMI_RS485_230VAC-Rev-1-2.pdf Hat den Vorteil dass man sich nichts selber bauen muss und eine Befehlsliste dazu bekommt. Die Befehlsliste die mit dem Teil geliefert wird sieht gut aus. Weil die Befehle in der Schaltung in das SMI-Protokoll übersetzt werden sind die Befehle für jeden zugänglich und lassen sich sogar auf der Vestamatic-Homepage herunterladen. Man benötigt nur eine RS458-Schnittstelle. Karl schrieb: > Alternativ: KNX SMI-Gateway von zb Becker. Das habe ich auch überlegt. Mein Problem dabei ist nur dass der Aktor nur 8 Antriebe ansteuern kann. Ich habe genau 16 Antriebe und müsste wegen ungünstiger Verkabelung drei Aktoren kaufen. Gruß IngoF
@Ingo, ich würde gerne den TTL232-SMI-Adapter nachbauen. Was bedeutet denn "Die Bauteilauswahl ist nicht gerade die beste ... Aber für einen Prototyp zum testen ganz OK."? Da ich die Teile sowieso bestellen werde, welche Teile wären verbesserungswürdig? Gibt es Erfahrungen vom Test? Hat sonst schon jemand diesen oder einen anderen SMI-Adapter gebaut? Schon jemand mehr Erkenntnisse über das Protokoll gesammelt? WernerF.
Hallo Werner, Werner F. schrieb: > Die Bauteilauswahl ist nicht gerade die beste ... Eigentlich war da Hauptsächlich der CNY17-2 gemeint. Das war aber wohl ein Lesefehler. Der CNY-17 hat keine 500V Isolationsspannung sondern 5000V. Denke das sollte wohl reichen... Werner F. schrieb: > Gibt es Erfahrungen vom Test? Die Schaltung benötigt im Extremfall 220mA. Dummerweise ist wohl mein FTDI USB-TTL232-Kabel kabel defekt und konnte die Schaltung nicht vesorgen. Meine Version könnte eigentlich 500mA vom USB-Bus durchschalten. Musste also noch eine Externe 5-Volt-Stromversorgung anschließen. Das liegt aber am defekten FTDI-USB-Kabel das ich hatte. Da ich keine 22V Z-Diode hatte und mein DC/DC-Wandler 26Volt (statt der 24V) am Ausgang hatte habe ich einen simplen Spannungsteiler verwendet (R1=4,7kOhm, D1=22kOhm). Die Version mit Z-Diode wird die Spannung aber zusätzlich auch noch mal stabilisieren. Bei mir hat die Schaltung einwandfrei funktioniert. Mit dem Programm der SMI-Group kann man die ganzen Telegramme auch selber entziffern. Werner F. schrieb: > Schon jemand mehr Erkenntnisse über das Protokoll gesammelt? Mit dem Programm der SMI-Group kann man die meisten Telegramme auch ganz einfach selber erkunden. Einfach meine Schaltung nehmen ein Motoreinstellkabel und mindestens 1 SMI-Antrieb kaufen. Mit zwei Antrieben kann man auch die Konfliktlösung beobachten. Ein Konflikt wäre z.B. wenn zwei Motoren mit der SlaveAdresse 0 vorhanden sind... Dazu habe ich ein TTL-USB-Kabel an der Platine angeschlossen. Ein zweites USB-TTL-Kabel habe ich dann mit dem RX-pin parallel zum RX-Pin vom anderen USB-Kabel angeschlossen. Der TX-Pin habe ich nicht angeschlossen. Da in Empfangsrichtung auch die Senderichtung Schaltungsbedingt mit "empfangen" wird klappt das so problemlos. Den COM-Port am SMI-Programm einstellen der mit TX und RX-Pin angeschlossen ist. Am Terminalprogramm mit Hexadezimaldarstellung wie z.B. HTerm 2400 8N1 einstellen und sehen was gesendet und empfangen wird... Gruß Ingo
Danke für die Rückmeldung. Wir sind im November in unser neues Haus eingezogen. Es hat 7 Rollläden mit Warema-Motoren und elero ProLine-Steuergeräte mit SMI-Bus. Mal sehen, ob ich die mittelfristig zentral unter Kontrolle bekomme. Wenn ich was neues herausfinde, melde ich mich wieder.
Michael Buchstaller schrieb: > Mir wurde versprochen, daß ich weitere Infos dazu erhalte, was es denn > kostet und welche Verpflichtungen man eingeht, wenn man Partner der > SMI-Group werden will. Hallo Michael, gibt es schon irgendwelchen Infos dazu? Ich hatte auch mal angerufen und sollte dann auch weitere Infos bekommen. Es ist aber nie was angekommen. Hatte auch nicht mehr weiter nachgebohrt. @all damit die "Hobbyentwickler" auch mal ein wenig weiter kommen: Hier ein paar Sachen die ich herausgefunden habe: Das erste Byte ist die Adressierung der Antriebe. Es gibt generell drei Möglichkeiten die Antriebe zu adressieren: Alle Hersteller adressiert man mit 0x40 Einen Speziellen Hersteller adressiert man mit den Bits 0 bis 3. Also Hersteller 1 0x41 und Hersteller 15 adressiert man mit 0x4F Die Slave-Adresse kann man mit 0x50 bis 0x5f adressieren. 0x50 ist dabei der Antrieb mit der Slave-Adresse 0. 0x5f ist Antrieb mit der Slave-Adresse 15. Man kann auch von einem Hersteller bis zu 16 Slave-Adressen gleichzeitig adressieren. Dazu gibt es denn Parameter 0xC0 der von zwei Bytes mit den Adressen der Slaves gefolgt wird. Also wenn man z.B. die Slaves 0,1 und 15 von Elero (= 0x03) adressieren will: 43 C0 80 03 01 79 die letzten beiden Bytes sind der Befehl und die Prüfsumme. Um die Prüfsumme einfach die Bytes addieren und das Vorzeichen des LOW-Byte umkehren (zweier Komplement) 43 + C0 + 80 + 03 + 01 = 187 -> 87 -> 79 Wenn man also alle Bytes der Befehl addier ist das Low-Byte des Ergebnisses immer 0x00: 43 + C0 + 80 + 03 + 01 + 79 = 200 -> 00 Das Problem bisher ist das alle Antriebe bei Aslieferung die SLAVE-Adresse 0 haben. Wer mehr heraussfindet kann es gerne posten... Gruß IngoF Der Befehl 0x01 fährt den Antrieb hoch. der Befehlt 0x02 wieder herunter.
Update: Also unser Elektriker behauptete tatsächlich, die Elero-Steuerungen, die er bei uns verbaut hat, würden über einen Bus angesteuert (den er nicht im Detail kennt). Da konnte eigentlich nichts anderes als SMI gemeint sein. Elero rückt aber keine Infos dazu heraus. Inzwischen weiß ich, dass da weit und breit kein Bus, sondern nur ein Telefonkabel ist, das die Steuergeräte ohne jedes Protokoll verbindet. Man kann die Dinger ganz leicht einzeln und als Gruppe ansteuern, wenn man die richtigen Anschlüsse kurz schließt. Im Anhang als PDF die Dokumentation dazu (aus einem Australischen Forum, deshalb der Bezug zu C-Bus). Vielleicht spart sich jemand die Zeit damit, die ich verbraten habe. Stichworte: Elero, ProLine, VarioTec, AstroTec, AeroTec, Interface, Schnittstelle
> Hallo Michael, > gibt es schon irgendwelchen Infos dazu? @Ingo: Nein, da ist bis heute nichts mehr gekommen. Hatte aber aucgh keine Lust, da noch weiter nachzubohren. Habe inzwischen schon seit einiger Zeit das Interface von Selve rumliegen, bin nur nicht dazu gekommen, damit mal zu spielen. Hat übrigens so ca. 300 Euro gekostet, weil die Typen von Selve es mir partout nicht verkaufen wollten, so daß ich über irgendeinen Elektro-Fachbetrieb bestellen musste. Drin ist übrigens ne Menge Kleinkram, hauptsächlich ein MAX232 , 2 Opto- Koppler und ein Haufen Kleinkram. Wollte das jetzt nicht weiter genauer untersuchen, aber die haben es da für nötig befunden, die Platine zweiseitg zu bestücken. Wenns wen interessiert, kann ich mal Fotos davon machen und hier reinstellen. Habe nun einen Motor drangehängt, und einfach mal mitgetraced, was da so über die serielle Leitung rein- und rausgeht (2400N81). Meine Notizen hier: Kommando Bytes Diagnose 20 00 E0 Diagnose Motor 1: 31 00 CF Antwort: FF FF FF E0 FF (alle stehen) Diagnose Motor 1: 31 00 CF Antwort: FF E0 FF FF FF (mind. 1 Motor läuft (ja, 1 nach AUF) Diagnose Motor 1: 31 00 CF Antwort: FF FF E0 FF FF (mind. 1 Motor läuft (ja, 1 nach AB) Motor 0 Auf 50 01 AF Antwort: FF Motor 1 Auf 51 01 AE Antwort: FF Motor 2 Auf 52 01 AD Antwort: FF Motor 3 Auf 53 01 AC Antwort: FF Motor 4 Auf 54 01 AB Antwort: FF Motor 5 Auf 55 01 AA Antwort: FF Motor 6 Auf 56 01 A9 Antwort: FF Motor 7 Auf 57 01 A8 Antwort: FF Motor 8 Auf 58 01 A7 Antwort: FF Motor 9 Auf 59 01 A6 Antwort: FF Motor 10 Auf 5A 01 A5 Antwort: FF Motor 11 Auf 5B 01 A4 Antwort: FF Motor 12 Auf 5C 01 A3 Antwort: FF Motor 13 Auf 5D 01 A2 Antwort: FF Motor 14 Auf 5E 01 A1 Antwort: FF Motor 15 Auf 5F 01 A0 Antwort: FF Motor 0 Ab 50 02 AE Antwort: FF Motor 1 Ab 51 02 AD Antwort: FF Motor 2 Ab 52 02 AC Antwort: FF Motor 3 Ab 53 02 AB Antwort: FF Motor 4 Ab 54 02 AA Antwort: FF Motor 5 Ab 55 02 A9 Antwort: FF Motor 6 Ab 56 02 A8 Antwort: FF Motor 7 Ab 57 02 A7 Antwort: FF Motor 8 Ab 58 02 A6 Antwort: FF Motor 9 Ab 59 02 A5 Antwort: FF Motor 10 Ab 5A 02 A4 Antwort: FF Motor 11 Ab 5B 02 A3 Antwort: FF Motor 12 Ab 5C 02 A2 Antwort: FF Motor 13 Ab 5D 02 A1 Antwort: FF Motor 14 Ab 5E 02 A0 Antwort: FF Motor 15 Ab 5F 02 9F Antwort: FF Motor 0 1% 50 45 02 8F DA Antwort: FF Motor 0 10% 50 45 19 99 B9 Antwort: FF Motor 0 50% 50 45 7F FF ED Antwort: FF Motor 0 90% 50 45 E6 65 20 Antwort: FF Motor 0 99% 50 45 FD 6F FF Antwort: FF Motor 1 99% 51 45 FD 6F FE Antwort: FF Pos.Abfrage Motor 0:70 05 8B Antwort 54.08%: EF 45 8A 71 D1 Pos.Abfrage Motor 1:71 05 8A Antwort 98.99%: EF 45 FD 6C 63 Motor 0 Stop: 50 00 B0 Motor 1 Stop: 51 00 AF Antwort: FF Das letzte Byte scheint in der Tat die Prüfsumme zu sein. die Motorpositionen sind also 16.bittig 00 00 .... FF FF angegeben. Was mir noch nicht ganz klar ist, sind die Rückmeldungen der Diagnose-Befehle. 5-mal FF scheint "alles Ruhig" zu heißen, allles andere müßte man nochmal genauer untersuchen. Aber ich glaube, mit diesen Angaben kann man schon ein bißchen was anfangen. Disclaimer: Kein Hersteller trug Informationen bei; alles mußte selbs rausgemessen werden - somit auch ein Copyright dieser Info´s, und sie dürfen frei weiterverwendet werden. Würde mich freuen, wenn wer anderes noch weitere Dinge rausfindet. Grüße -Michael
Michael Buchstaller schrieb: > Das letzte Byte scheint in der Tat die Prüfsumme zu sein. Ja das stimmt. Einfach alle Bytes addieren und dann negieren (2er Kompelement). Kontrolle: alle Bytes inkl. Prüfsumme addieren. Ergebnis sollte 0 sein. Habe auch noch so ein paar Sachen durch den Mitschnitt heruasgefunden. Habe aber jetzt wegen anderen Dingen keine Zeit das jetzt fürs Netz aufzubereiten. Nach den Ferien habe ich vermutlich Zeit dazu... Gruß IngoF
Michael Buchstaller schrieb: > 5-mal FF scheint Es gibt zumindest Antrieb Auf, Antrieb Ab, Es antworten dann alle Antriebe auf dem SMI-Bus Wenn Ein Antrieb auf oder Ab fährt ist das entsprechende Byte oder besser "Bit" 0xE0 Gruß IngoF
Angehängte Dateien:
-

TTL_SMI_Test1.gif
18 KB
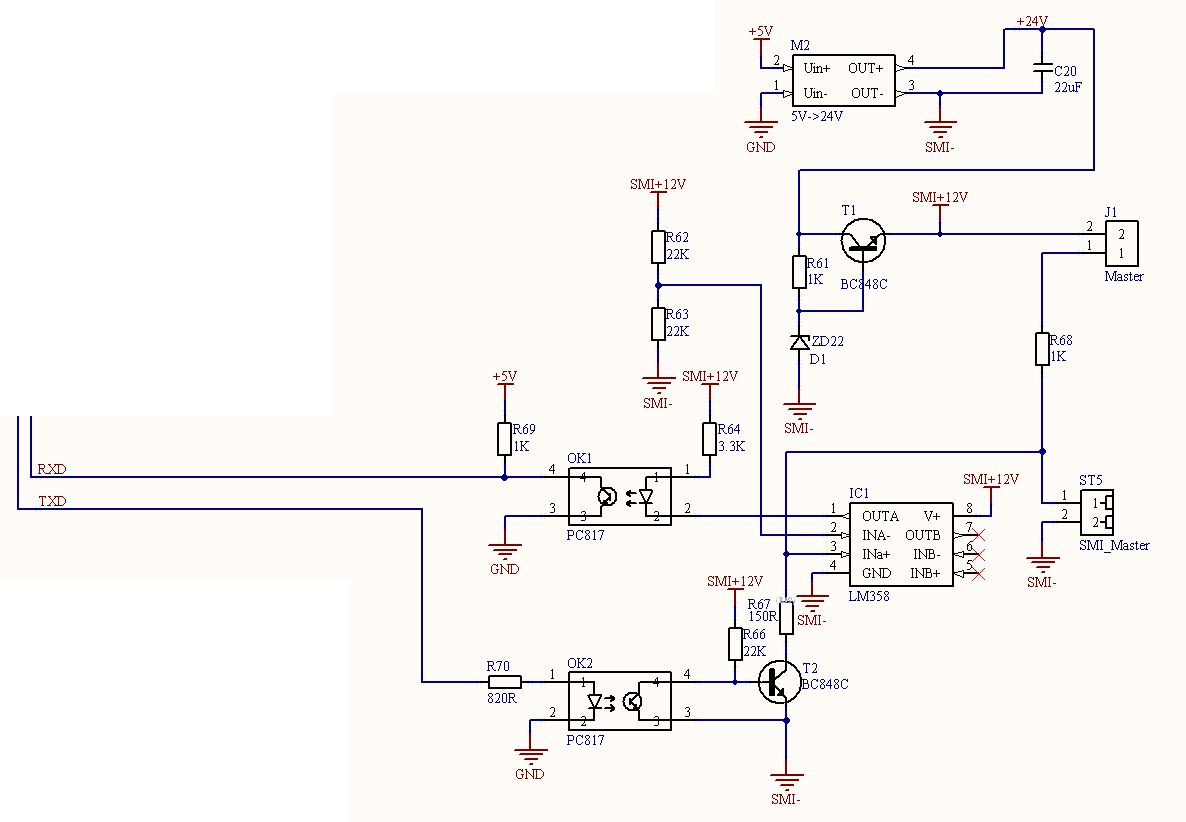
Hallo Ingo, nachdem es bei mir jetzt mit dem Selve-Interface geklappt hat, möchte ich gerne Deinen Schaltungsvorschlag nutzen, um mir ein kleines Komplettgerät zur Steuerung LAN->SMI zu bauen. Hier nur eine kurze Verständnisfrage: Du verwendest einen DC/DC-Wandler, um von den TTL-seitigen +5V auf die für SMI benötigten 24V zu kommen (unf dür die Isolation natürlich). Überall in Deinem Plan sind "SMI +12V"-Punkte angegeben. Wenn ich das richtig verstehe, hast Du aber mit R1/D1 und T1 eine einfache Spannungsregelung vorgesehen, die schätzungsweise etwas über 21V liefern dürfte. Soll man auf dem SMI-Bus keine 24V anlegen, oder hat die Regelung den Sinn, restlichen Ripple des DC/DC Konverters zu entfernen ? Oder überseh ich gerade irgendetwas ? Ich hab das jetzt mal mehr oder weniger 1:1 nachgezeichnet; sollte doch so laufen, oder ? (der PC817 hat 1:1 Übertragungsverhältnis, sollte also auch passen - und den LM358/BC848C nehme ich, weil ich die rumliegen habe - sollte aber bei 2400 baud unkritisch sein, denke ich...) Falls noch wer anderes die Schaltung bereits aufgebaut hat, würde ich mich natürlich über Hinweise sehr freuen ! bis bald -Michael
Angehängte Dateien:
-

dc-dc-wandler.PNG
2,2 KB

Hallo Michael, schön zu wissen dass ich mit dem Schaltungsvorschlag jemanden helfen kann. Bin an Deinem Endprodukt auch sehr interessiert. Wollte soetwas eventuell auch bald in Angriff nehmen... Mein gekaufter SMI-Controller ist relativ teuer und kann nicht das was ich so gerne hätte. Bei Dir ist allerdings der 1k-Widerstand auf die SMI- Seite gerutscht. Würde das ändern um etwas besser Schlafen zu können. Vermutlich ist es egal da alle Wandler ja galvanisch voneinader getrennt sein sollten. Allerdings fällt am 1k Widerstand die meiste Spannung und Du hast dann im Bezug zur Schaltungsmasse dann Zeitweise etwa +20Volt Potential. An meinem Controller sind am Ausgang etwa 21Volt. Da ich die SMI-Spezifikationen nicht kenne wollte ich auch nicht höher gehen. Ich habe einen 1W-Wandler eingeplant. Da die DC/DC-Wandler mit mindestens 10% belastet werden müssen fließen über die Z-Diode schon mal 4-5% die restlichen 5-6% sollte die Schaltung benötigen. Eventuell eine LED zum verbraten der Leistung einbauen. Diese hat dann noch den positiven Nebenffekt der Einschaltkontrolle ;-) Da der SMI-Bus bei Kurzschluss oder wenn mehrere Busteilnehmer gleichzeitig senden mit maximal 21mA belastet wird sind das schon mal 52%. Also sollte noch genug Reserve sein damit der Wandler nicht überlastet werden kann. Bei DC-DC-Wandlern sollte man am Ein- und Ausgang noch etwas Filtern. Bei meiner anderen Schaltung habe ich die Lösung aus dem Bild verbaut. Am besten mal die ApplicationNotes vom Hersteller etwas durchstöbern... Müsste jetzts selber nach Deinen Bauteilen googlen. Aber denke schon dass die so OK sein werden. Berichte mal falls es was neues gibt. Bin natürlich neugierig..... Gruß IngoF
Hallo Ingo, > Mein gekaufter SMI-Controller ist relativ teuer und kann nicht das was > ich so gerne hätte. So sehe ich das mit meinem gekauften RS232->SMI konverter. 300 Euro dafür finde ich schon ein bißchen happig. Gerade wenn man für jedes Stockwerk im Neubau einen einbauen will (sind 8 Motoren in jeder Etage, und ich will verdrahtungstechnisch nicht 2 Etagen zusammenfassen) > Bei Dir ist allerdings der 1k-Widerstand auf die SMI- Seite gerutscht. > Würde das ändern um etwas besser Schlafen zu können. ich steh grad auf dem Schlauch - von welchem der Widerstände sprichst Du ? Die Nummern in Deinem und meinem Plan sind gleich; ich habe nur einen Offset von 60 dazugezählt, um nicht überall im restlichen Plan umnumerieren zu müssen. >Vermutlich ist es > egal da alle Wandler ja galvanisch voneinader getrennt sein sollten. > Allerdings fällt am 1k Widerstand die meiste Spannung und Du hast dann > im Bezug zur Schaltungsmasse dann Zeitweise etwa +20Volt Potential. aso... also damit der SMI-Teil nicht floatet, wenn nichts angeschlossen ist. > An meinem Controller sind am Ausgang etwa 21Volt. Da ich die > SMI-Spezifikationen nicht kenne wollte ich auch nicht höher gehen. OK, verstanden. > Ich habe einen 1W-Wandler eingeplant. Da die DC/DC-Wandler mit > mindestens 10% belastet werden müssen fließen über die Z-Diode schon mal > 4-5% die restlichen 5-6% sollte die Schaltung benötigen. Eventuell eine > LED zum verbraten der Leistung einbauen. Diese hat dann noch den > positiven Nebenffekt der Einschaltkontrolle ;-) Ich wollte jetzt für den Prototypen irgendwas nehmen, was man beim Bürklin bestellen kann, so daß auch Einzelteile am nächsten Tag da sind. Habe keinen Wandler mit 24V Ausgang gefunden, drum den https://www.buerklin.com/datenblaetter/K124920_TD.pdf hier 26K1738 (Traco TMA0512D) genommen, mit Diual-Output +/-12V, somit habe ich unter Ignorieren des Massepins meine 24 V. Angeblich regelt der ja laut Datenblatt auf +/- 10%, aber ob das auch bei nahezu-Leerlauf gilt, steht natürlich nicht drin - aber die Stabiliserung mit Z-Diode wirds dann schon richten ;-) > Da der SMI-Bus bei Kurzschluss oder wenn mehrere Busteilnehmer > gleichzeitig senden mit maximal 21mA belastet wird sind das schon mal > 52%. Also sollte noch genug Reserve sein damit der Wandler nicht > überlastet werden kann. Von Recom habe ich kleinere Wandler mit 0.5 W schon gesehen, aber die reden nicht mit mir, wenn ich keine 1000er Stückahlen bestelle. Für eine evtl. spätere Serie kann man ja dann mal schauen, was es so in Fernost gibt... > Bei DC-DC-Wandlern sollte man am Ein- und Ausgang noch etwas Filtern. > Bei meiner anderen Schaltung habe ich die Lösung aus dem Bild verbaut. > Am besten mal die ApplicationNotes vom Hersteller etwas durchstöbern... Ich habe 22uF am Ausgang, und mit dem Scope nur einen Ripple gesehen, der größenordnungsmäßig auch von dem Abstand der Erdungsklemme zum Wandler kommen kann. Kann gut sein, daß man da bei billigeren Wandlern mehr filtern muss. > Berichte mal falls es was neues gibt. Bin natürlich neugierig..... neue Platine hab ich grad fertig, kommt übermorgen - dann kann ich genaueres sagen... Grüße -Michael
Michael Buchstaller schrieb: > ich steh grad auf dem Schlauch - von welchem der Widerstände sprichst Du Ich meinte R68 oder bei mir R8. Aber ich habe mich vertan. Das ist oben der Jumper für den SMI-Master und nicht die Klemmen für den SMI-Bus. Ist also richtig bei Dir. Michael Buchstaller schrieb: > Von Recom habe ich kleinere Wandler mit 0.5 W schon gesehen Das macht ja wenig Sinn. Beim Kurzschluss hat man schon eine Auslastung vom 1W-DC/DC-Wandler von 52% +4% von der "Regelung" und Deine restliche Schaltung ist der 1W DC/DC-Regler schon OK. Eventuell würde ein 0,75-Watt Regler gehen. Der 0,5W würde im Kurschlussfall oder wenn z.B. 16 Busteilnehmer gleichzeitig Antworten schon überlastet. Aber an die 0,75-Regler kommt man ja noch schlechter... Michael Buchstaller schrieb: > ja laut Datenblatt auf +/- 10% ja, eben +10 Prozent 24 * 110% =26,4. Bei allen Reglern die ich gesehen haben gilt etwa +10% bei Minimallast und bei etwa 80% Last normalerweise um die 0%. Gruß IngoF
So, Platine ist mittags gekommen und ich hab sie auch gleich bestückt. So weit ich es beurteilen kann, läuft es so, wie es soll. (an meinem einzelnen Testmotor, den ich hier auf dem Tisch liegen habe) Habe noch nicht mit dem Scope die Signalfornmen angeschaut. Werde aber jetzt erstmal den Krempel packen und im Neubau an 6 dort bereits verkabelte Motoren anschließen, und mal schauen, wie es sich dort verhält... Melde mich wieder, sobald ich genaueres weiß ! -Michael
So, jetzt eingebaut, angeschlossen und läuft ! Hat erstaunlicherweise ganz problemlos geklappt. Habe noch eine einfache Weboberfläche dazu gestrickt, auf der man mit Slidern die Soll-Position der Rolladen vorgeben kann, und die Motoren fahren dann dorthin;die Slider bewegen sich im Web-Frontend dann parallel zu der tatsächlich gemeldeten Motorposition. Jetzt kann ich leider nicht weiter testen, weil da nun 3 erwachsene Männer wie die kleinen Kinder damit spielen müssen, vom Browser aus die Rollos vor ihren Büros hoch- und runterzufahren ;-) Gut, daß ich vom PCB-Pool 2 Platinen bekommen habe - da kann ich dann wenigstens morgen mit der 2. mal Messungen der Signalqualität machen. Wenn wen interessiert, kann ich gerne auch dem kompletten Plan meines Ansteuermoduls hier posten. (wobei da nichts wiklich interessantes zu sehen ist, halt noch eine Sockelleiste für das RT3550-CPU-Modul, ein 5V-Regler dafür und ein paar Stecker (LAN, serielle Console) -Michael
Hallo Michael, vielen Dank für Deine Erfahrungsberichte. Ich habe SMI-Raffstore und brauche ein Interface von SMI auf RS232. Allerdings tendiere ich dazu, es von Wago zu kaufen. Hab im Moment zu viele offene Baustellen... Grüße, Tom
Hi Tom, also wenn Du wirklich nur die Umsetzung von RS232 auf SMI willst, kannst Du ja die Schaltung von Ingo übernehmen, noch einen MAX232 dran und fertig ist das Interface. Ich habe diese Schaltung ja auch erfolgreich nachgebaut. Bei mir ist halt noch ein CPU-Modul dabei, weil es mir wichtig ist, daß man einen Webserver hat, von dem aus die Steuerung über einen Browser möglich ist. Anbei auf jeden Fall mal meine komplette Schaltung. -Michael
Hallo ihr, total interessantes Thema, ich plane gerade mir einen Aussen-Raffstore zu kaufen welche es auch mit SMI-Ansteuerung gibt. Und den am liebsten einfach mit einem Atmel ansteuern, bei mir gibts bereits einen (teils) selbstgebastelten Bus mit 24V Stromversorgung. Leider hab ich was Elektronik-Schaltungen angeht nur ein wackeliges Halbwissen, ich würd mich freuen wenn ihr mir da ein wenig helfen könntet. 1) Ich benötige den DC/DC-Wandler nicht, wenn ich bereits 24V habe? Oder sollte ich einen 24-24V DC/DC-Wandler trotzdem einsetzen um eine Trennung hinzubekommen? 2) Mir ist noch nicht ganz klar, woher genau die 21V kommen. Ist das nur eine Annahme/Vorsichtsmaßnahme? Wieviel fällt denn aus den "offiziellen" SMI-Interfaces raus? Viele Grüße Sebastian
Hallo Sebastian, Sebastian Roesner schrieb: > Ich benötige den DC/DC-Wandler nicht, wenn ich bereits 24V habe? Den habe ich nur genommen um nicht noch ein Extra Netzteil nehmen zu müssen. Wenn die 24Volt schon vorhanden sind sollten die vermutlich auch schon gehen. Sebastian Roesner schrieb: > Mir ist noch nicht ganz klar, woher genau die 21V kommen. Aus meiner SMI-Steuerung kommen die 21Volt heraus. Also habe ich dann auch nur 21 Volt für das Interface genommen. Vielleicht gehen ja auch 24 Volt nach SMI-Spezifikation. Also bin ich dann mit 21Volt auf der Sicheren Seite... Gruß Ingo
Hi Ingo, danke für die Antwort. Ich werds also einfach mal mit 24V versuchen.. Eine Frage hab ich allerdings noch, und zwar zur Invertierung von RX/TX. Wenn ich das richtig verstanden hab, hat der Bus im Normalzustand 24V und wenn einer der Teilnehmer senden will, zieht er I+ auf GND? Und wenn ich den Teil mit dem Mikrocontroller richtig verstehe, heißt das doch, wenn TX auf GND gezogen ist (also quasi der Idle-Zustand), wird auch I+ auf dem SMI-Bus auf GND gezogen. Ist das nicht genau falsch rum? Oder übersehe ich was? Oder schließt du das irgendwie direkt an ne serielle Schnittstelle an, die ja invertiert ist? Die Schaltung von Michael macht es aber genauso, und das verwirrt mich.. Ich würde das nämlich gern direkt an die RX/TX-Pins von einem ATMega168 hängen und über die Serial-Funktionen von dem ansteuern.. Viele Grüße Sebastian
Hallo Sebastian, Sebastian Roesner schrieb: > direkt an die RX/TX-Pins von einem ATMega168 hängen Geht doch. Es ist ja kein RS232 sondern TTL-Pegel. Die TTL-Schnittstelle hat doch als Ruhepegel High (+5V). Wenn man einen MAX232 hinten dran hängt wird der Pegel ja invertiert. (Ruhepegel -12V). Der wird aber nur benötigt wenn man noch eine RS232-Schnittstelle im PC hat. Also ATMega dranhängen und glücklich werden ;-) Ich habe die Schaltung so aufgebaut und ein TTL-Serial-USB-Kabel angeschlossen und hat einwandfrei funktioniert. Gruß Ingo
Sebastian Roesner schrieb: > Die Schaltung von > Michael macht es aber genauso, und das verwirrt mich Das liegt daran, daß auch von meinem CPU-Modul die seriellen Signale als TTL-Pegel kommen.
Hallo, Sebastian Roesner schrieb: > macht es aber genauso, und das verwirrt mich.. Denke die Verwirrung kommt vielleicht durch die Bezeichnung im Schaltplan. Dort steht "RS232-SMI". Das ist dann natürlich falsch. Die Schaltung hat keine Schnittstelle nach "RS232" sondern eben TTL... Gruß Ingo
Hi ihr, danke, so langsam bin ich schlauer ;) Eine (hoffentlich) letzte Frage hab ich noch.. Die Rolladen, die ihr da habt, ist das "SMI" oder "SMI LoVo"? Wenn ich http://www.knx-gebaeudesysteme.de/sto_g/Deutsch/Oesterreich_Schweiz/ABB_ibus_KNX/VERKAUFSINFORMATION/SJRS_42421_PLHB_FL_DE_V1-0_SMI-PLANUNGSHANDBUCH_2011-07.PDF richtig verstehe nutzt SMI (ohne LoVo) 230V als Steuerspannung? (ab Seite 28) Viele Grüße Sebastian
Sebastian Roesner schrieb: > > Die Rolladen, die ihr da habt, ist das "SMI" oder "SMI LoVo"? Wenn ich Ich habe nur 230V-Antriebe. Also kein LoVo. > http://www.knx-gebaeudesysteme.de/sto_g/Deutsch/Oe... > > richtig verstehe nutzt SMI (ohne LoVo) 230V als Steuerspannung? (ab > Seite 28) Auf Seite 35 steht dazu wohl etwas. Dem Text nach würde ich einfach sagen dass die LoVo mit einer niedrigeren Spannung arbeiten. LoVo steht wohl für LowVoltage. Die SMI ohne LoVo eben 230 Volt. Den Satz " Dank der einheitlichen Schnittstelle SMI passen intelligente Antriebe und Steuerungen zueinander" würde ich so deuten dass man die Antriebe auch einfach wild durcheinander würfeln kann. Was meinst mit Steuerspannnung? Auf dem SMI-Bus sind keine 230 Volt. Allerdings kann man die Motoren auch über normale Taster und 230Volt steuern. Also nur "hoch" oder "runter". Die Taster dürfen aber auf keinen Fall angeschlossen werden sobald die Motoren über die Telegramme auf dem SMI-Bus gestuert werden. Meine Schaltung würde keine 230Volt auf dem SMI-Bus überstehen. Aber das wird auch ganz sicher keiner der SMI-Zertifizierten Hardware überstehen. Denke man kann keine SMI LoVo und SMI-Antriebe gemainsam über die Taster schalten. Im Telegrammbetrieb allerdings schon. Das ist zumindest meine Meinung. Ofizielle Infos habe ich nirgendwo finden können... Gruß Ingo
Auf Seite 34 steht dazu dass SMI-LoVo- Antriebe mit Gleichspannung arbeiten....
Hei, damit ist nur die Versorgungsspannung gemeint. Irgendwo habe ich mal gelesen, dass bestimmte Antriebe keine 230V haben dürfen. Aus Sicherheitsgründen. Welche, weiß ich aber nicht mehr. Grüße, Tom
Hallo, danke für eure Hilfe! Ich hatte mir eine Platine dafür fertigen lassen, mit einem MCP2200 für USB und auch mit einem 5->24V DC-DC-Wandler. Heute wurden die Jalousien installiert und alles hat auf Anhieb funktioniert :) Das praktische, ich muss wirklich nur den Bus und USB anschließen und benötige keine zusätzlichen 5 oder 24V. Für die Interessierten hab ich Board/Schaltplan als Eagle-File angehängt, allerdings ist das nicht ganz die Version die ich hab fertigen lassen - Ich hatte einen SMD-Quarz vorgesehen und deutlich näher am MCP2200 gehabt, leider erst danach gesehen dass es die Bauform bei Reichelt nicht gibt. Daher ist das geändert, aber halt nicht getestet. Don't blame me ;) Dafür gibts alle verwendeten Teile bei Reichelt. Viele Grüße Sebastian
Hallo Sebastian, wollte mir grad mal Dein Wer anschauen. Leider meckert mein Eagle (5.11) "ungültige Datei" sowohl beim *brd als auch beim *sch. Aber freut mich, daß es auch bei Dir reibungslos geklappt hat. An dieser Stelle nochmal Dank an Ingo für seinen ursprünglichen Vorschlag ! Grüße -Michael
Michael Buchstaller schrieb: > Leider meckert mein Eagle (5.11) Das liegt an der Version. Die Datei wurde mit Eagle 6.5.0 erstellt. Steht auch in der Datei am Anfang drin. Habe neugierigerweise mal mein 5.11 "upgedated" und dann funtkioniert es auch.. Freut mich dass jemand meinen Schaltungsentwurf nutzen und für sich weiterentwickeln konnten.... Gruß IngoF
Wollte nur mal der Vollständigkeit halber anmerken, daß die von Ingo vorgeschlagene und von mir adaptierte Schaltung inzwischen seit einem halben Jahr in 3-facher Ausführung (Je eine Platine pro Stockwerk, mit je 9-12 Motoren) problemlos läuft. -Michael
Hallo Ihr, tolle "Forschungs" - Arbeit, supi. Was mich interessiert ist eher die Langzeitstabilität der Motoren? Hat da wer Erfahrung? Die klassischen Motoren haben ihre Steuerung ja meist im Innenraum. Jetzt ist in den Motoren eine Menge Elektronik und die ist auch noch ordentlichen Temperaturschwankungen ausgesetzt. Ich glaube nicht das ein Aufwand wie in der KFZ Industrie getrieben wird um die Motoren & Elektronik möglichst lange am Leben zu halten. Ist es nicht möglich über eine gescheite Anschnittssteuerung die "alten" Motoren auch genauso Sanft und Präzise zu steuern wie dies mit SMI versprochen wird? Gruß Thomas
Hei, sanft vielleicht ja, präzise definitiv nein. Denn dazu fehlt der Wegsensor, den die SMI Antriebe haben... Ich habe nun übrigens ein Wago SMI Interface eingesetzt. Denn während dem Hausbau hat man einfach keine Zeit für Lötarbeiten. Da hab ich mit der Programmierung der Haussteuerung noch genug zu tun. Viele Grüße, Tom
Hallo! Kennt jemand die SMI-Befehle für Raffstoren, um die Lamellen separat zu steuern? Gibt es sowas? Und ich habe noch eine Frage zu der Schaltung: Kommt da irgendwo +12V vor? Oder was das ein Lesefehler und es ist immer +21V gemeint? Kann man D1, R1 und T1 auch einfach weglassen und +24V draufgeben? Danke Christian
Christian H. schrieb: > Oder was das ein Lesefehler und es ist immer +21V gemeint? Kann man > D1, R1 und T1 auch einfach weglassen und +24V draufgeben? Also die 21 Volt kommen von der Messung an meinem gekauften SMI-Controller. Der 24V DC-DC-Wandler hat bei einer bestimmten belastung 24V (Wenn es kein geregelter ist). Im Leerlauf kommen 28Volt heraus. Da ich die SMI-Bus Spezifikationen nicht kenne habe ich die Spannungsregelung mit diesen drei Bauteilen aufgebaut. An welche Raffstore hast Du denn gedacht, gibt es einen Link dazu? Normalerweise sind doch alle Lamellen an einem Fenster susammen anseuerbar? Christian H. schrieb: > Kennt jemand die SMI-Befehle für Raffstoren Das Mit den Befehlen sollte nicht das Problem sein... Christian H. schrieb: > Kommt da irgendwo +12V > vor? Nein. Meine Schaltung war auch für TTL-RS232 gedacht... Kann mann aber ändern wenn mann möchte Gruß IngoF
> An welche Raffstore hast Du denn gedacht, gibt es einen Link dazu? Roma Modulo P. Mit einem Elro Mittelmotor JA06 soft oder halt jetzt evtl. noch JA06 soft SMI bestellen und diese Schaltung hier nachbauen und Befehle schicken und Relais im Schaltschrank sparen. Ich habe bis jetzt vom Fensterbauer keine Infos bekommen und bei Roma garnichts gefunden. Hab auch leider bevor ich diesen Thread hier fand einen wegen den Lamellen aufgemacht: Beitrag "Raffstoren Lamellenposition steuern" (Ob SMI-Motoren intern mehr machen als nur die Zeit stoppen, z.B. einen Drehimpulsgeber haben - Laut SMI Planungsbuch schon) >Normalerweise sind doch alle Lamellen an einem Fenster zusammen >ansteuerbar? Ich verstehe die Rückfrage nicht. Was ich von SMI und den Befehlen bis jetzt gesehen habe ist, dass man eine Position übergibt und die wird dann angefahren. Raffstoren scheinen aber soweit ich das bis jetzt verstanden habe zwei Parameter zu haben: Wie weit sie hochgezogen sind und welchen Winkel die Lamellen haben. Soweit ich das bis jetzt verstanden habe gibt es dafür nicht 2 Motoren, sondern nur einen. Schaltet man ihn an drehen sich die Lamellen erst komplett auf eine Position, dann fangen sie an hochzugehen und sich im Kasten zu sammeln. Schaltet man die andere Seite eines klassischen Jalousienmotors an, so klappt es erst in die andere Richtung und wenn der Winkel der Lamellenneigung sich komplett geändert hat, fängt es an runterzufahren. Mein Interesse an SMI besteht jetzt einfach nur darin, dass ich das komplexe Timing für den Winkel nicht unbedingt ausmessen und programmieren möchte und lieber einen Motor haben wollte, der dank SMI interne Sensoren hat um seine Winkelneigung und seine Position genau zu kennen. Für einen einfachen Rollladen kriege ich das auch selbst hin: Timer, runterfahren, stoppen. x% angefahren. Aber bei Raffstoren stelle ich mir halt vor dass ich weit unter 1s bleiben muss um die Lamellen z.B. 20° zu drehen. Und da käme vielleicht SMI in Frage. Dazu bräuchte ich nur die teureren Motoren zu bestellen und brauche noch den Befehl für die Lamellenneigung. Gibt es da einen? Oben im Thread stehen nur welche für eine Position, nicht für den Winkel separat davon wie hoch das Lamellenpaket gefahren ist. Oder verstehe ich hier etwas komplett falsch??? Und wenn so ein SMI-Raffstorenmotor intern nix anders ist als ein Motor mit zwei Endschaltern und einem Mikrocontroller mit fest einprogrammierten Totzeiten und sonstigen Parametern, der auch nur die Laufzeit mitrechnet und dann das SMI-Protokoll spricht, dann lohnt sich die Sache evtl. nicht. Wenn aber so ein SMI-Raffstorenmotor im Gegensatz zu seinem "dummen" Kollegen mit zwei Anschlüssen für Hoch und Runter jetzt tolle Drehimpulsgeber hat und immer alles 100% genau weiß, dann wäre das hier was für mich. > Christian H. schrieb: >> Kommt da irgendwo +12V >> vor? > > Nein. Meine Schaltung war auch für TTL-RS232 gedacht... Kann mann aber > ändern wenn mann möchte Okay, denn im weiteren Verlauf des Threads hat jemand das wohl so interpretiert, dass Deine Schaltung (Tausend Danke dafür, dass Du sie bereitstellst!) +12V hätte
Hei, also meine SMI Motoren haben Drehgeber drin und man kann auch deren Position im Stillstand auslesen. Man übergibt zwei Parameter, wie Du schon richtig erkannt hast. Lamellenposition und Lamellenwinkel. Es wird zuerst die Position angefahren und dann der Winkel eingestellt. Und man kann die Winkel sogar in 2° Schritten nachstellen. Das schafft man zeitgesteuert nicht. Wobei wir momentan noch gar nichts nachstellen. (Der Sonne nachführen) und es ist trotzdem schon recht gut. Allerdings war es ein RIESEN Drama, einen Hersteller zu finden, der SMI Motoren nicht nur anbietet, sondern auch tatsächlich verkaufen will. Achja, das Tolle am SMI: Man kann auch 230V auf die Steuereingänge geben, dann verhält sich der Raffstore wie ein herkömmlicher... Meine Raffstore (11 Stück) steuer ich über eine Wago-SPS an. Grüße, Tom
Also ich habe keine Raffstore/Jalousien sondern nur SMI-Rolladenantriebe. intern ist eine Lochscheibe und wird also auch genau die Position angefahren die eingegeben wird. Es ist auch möglich eine bestimmte Gradzahl hochzufahren. Denke aber schon dass die Stellung der Lamellen angefahren werden können. Dann wird das Rollo eben heruntergefahren und dann wieder ein Stück zurück für die richtige Lamellenposition. Am besten den Hersteller der SMI-Jalousien fragen, der sollte das wissen. Auf der SMI-Webseite gibt es auch Herstellerlisten dafür. Im Downloadbereich von SMI gibt es auch ein Programm um die SMI-Motoren anzusteuern. Einfach mit der vorgeschlagenen Schaltung an den Computer anschließen und dann die Befehle "mithorchen". Habe damit auch schon die Befehle für meine Rollos herausgefunden... http://standard-motor-interface.com/?page_id=16
IngoF schrieb: > intern ist eine Lochscheibe und wird also auch genau die Position > angefahren die eingegeben wird. Es ist auch möglich eine bestimmte Danke, das mit der Lochscheibe war mir wichtig! > Im Downloadbereich von SMI gibt es auch ein Programm um die SMI-Motoren > anzusteuern. Einfach mit der vorgeschlagenen Schaltung an den Computer > anschließen und dann die Befehle "mithorchen". > > Habe damit auch schon die Befehle für meine Rollos herausgefunden... > > http://standard-motor-interface.com/?page_id=16 Die Software ist sogar in .NET geschrieben und nicht obfusziert. Mit ilspy kann ich reinschauen. Das ist eine gute Idee, aber ich glaube, die Software hat garkeinen Button für die Lamellenposition, oder? Wenn nicht kann ich es auch nicht mitschneiden. Wenn irgendjemand die geheime Liste der Befehle hat wäre es toll, sie zu kennen. Oder muss man etwa selbst über SMI erst eine Position anfahren und dann um ein bisschen zurückfahren um die Lamellenneigung einzustellen??? Mal sehen, ob ich den ELERO Soft-SMI Motor bekommen kann und wieviel der kostet...
Hei, meine SMI Raffstore haben auch nur einen Motor. D.h. ja man muss etwas zurückfahren, dann wird der Lamellenwinkel verstellt. Grüße, Tom
Danke! Vielleicht gibt es diesen separaten Befehl dann garnicht und er muss immer so emuliert werden? Aber hilft einem der Drehimpulsgeber oder die Lochscheibe dann damit, dass man sehr präzise den Winkel einstellen kann? Wenn Du also zu einer bestimmten Position fährst und dann genau x Minipositionen weniger ansteuerst, kriegst Du dann reproduzierbare, exakte Lamellenwinkel? Lohnt es sich also allein führ die Lochscheibe und die Präzision auf SMI zu setzen und den Mehrpreis zu bezahlen (abgesehen davon, dass sich der Ärger mit dem Messen der Laufzeiten einsparen lässt und dass man einen SMI-Bus bekommt usw.)
Hei, hmmm. Ich nutze zur Ansteuerung eine SPS und darin eine vorgefertigte Lib. Der kann ich beide Positionen übergeben und die werden dann angefahren. Sehr genau und absolut reproduzierbar. Aber ob das nun in der Lib oder im Motorsteuergerät umgerechnet wird, kann ich Dir leider nicht sagen. Im Sommer steht die Sonne übrigens immer so hoch, dass man die Lamellen praktisch auf 90° stehen lassen kann und keine Nachführung benötigt. Im Winter will ich ja die Sonne (und damit die Wärme) im Haus haben. Ich dachte zuerst auch, wunder was brauche ich exakte Positionen und lasse mir Sonnenstand ausrechnen und fahre die Lamellen dann Sonnenstandgeführt ganz exakt nach. Das werde ich irgend wann mal machen, wenn ich zuviel Zeit habe. ;-) Grüße, Tom
Angehängte Dateien:
-

SMI_Interface_KL.PNG
4,3 KB

Hallo Ingo und Michael, vielen Dank für Eure Schaltungsvorschläge und den Kurzbericht über die Langzeiterfahrungen. Ich hoffe, Eure Jalousien laufen immer noch sauber hoch und runter? Bei der Analyse Eurer Schaltungen ist mir aufgefallen, dass der TX-Optokoppler im Idle (=TTL-HIGH) permanent "leuchtet". Irgendwo habe ich mal von einer begrenzten Lebensdauer von Optokoppler-LEDs gelesen. Zudem will man ja Strom sparen. Also habe ich mir überlegt, den TX-Teil der Schaltung so umzudesignen, dass der Optokoppler im Idle eben nicht leuchtet. Meine Kenntnisse im Schaltungsentwurf sind begrenzt, aber die Schaltung im Anhang habe ich schon verschiedentlich gesehen. Passt das so aus Eurer Sicht? Herzlichen Dank für die Rückmeldungen und viele Grüße Klaus
:
Bearbeitet durch User
Die serielle Schnittstelle hat aber im Idle-Zustand normalerweise HIGH. Wenn man da Strom sparen will würde man wohl mit etwas Abstand vor der Kommunikation auf HIGH gehen müssen, dann etwas warten und dann mit der Kommunikation anfangen die mit dem Low Start-Bit anfängt. Dieser erste Wechsel von LOW auf HIGH würde dann als Frame Error in allen Geräten erkannt und verworfen. So stelle ich mir das zumindest vor
Ehrlich gesagt würde ich mir da keinen Kopf drum machen. Die LED im Optokpoppler düfte sicher auch so lange genog leben. Und der Strom von ca. 2 mA durch die LED düfte im Blick auf den gesamten Rest der Schaltung vernachlässigmar sein. Da dürfte alleine schon der DC/DC-Wandler deutlich mehr ziehen.
Michael B. schrieb: > Ehrlich gesagt würde ich mir da keinen Kopf drum machen. Die LED im > Optokpoppler düfte sicher auch so lange genog leben. Von der Problematik bei OKs habe ich auch schon gehört. Das Problem ist wohl nicht die LED, sondern der Phototransistor. Der sperrt wohl nach ein paar Jahren Dauerbetrieb nicht mehr. Aber genaues weiss ich da leider auch nicht. Ich bin durch Zufall auf den Thread hier gestoßen, als er grade wieder hochgespült wurde. Das SMI-Interface scheint ja gerade für "Selbstautomatisierer" interessant zu sein. Aber dann bin ich auf den hohen Standby-Bedarf von ca. 2W pro Rolladen gestossen. Hat vielleicht jemand hier Erfahrung ob die Leistung von der Netzseite oder den 24V gezogen wird? Falls es netzseitig ist, haben die Rolläden ein Problem damit, wenn man das Netz einfach ausschaltet, wenn nicht gefahren wird? Ich finde das System sehr interessant. Aber selbst bei einem EFH finde ich den Ruheverbrauch ein No-Go. Euch allen ein schönes Wochenende
Habe mal nach MTBF und Optocopler gegoogelt und dabei im Abschnitt 8.1 von Solid-State-Relais was dazu gefunden. Demnach würden LED mit 10mA etwa durchschnittlich 33 Jahre leben. Und die Photoempfänger wären nicht das Problem. Dann wird die LED mit 2mA vermutlich noch länger halten. hier der Link dazu: http://www.ixysic.com/home/pdfs.nsf/www/AN-145.pdf/$file/AN-145.pdf Also habe es jetzt mal ausprobiert. Ich habe einen 7NM-Motor angeschlossen und der zieht 20,5mA im Standby. (Während er läuft 414mA). Das Problem ist dann in diesem Beispiel mit 4,7Watt noch größer als gedacht. Die 24V-Seite habe ich jetzt nicht gemessen. Dort kann aber nicht pro Motor 2Watt gezogen werden weil der DC/DC-Wandler nur zwei Watt liefert. Es ist aber kein Problem den Strom abzuschalten solange nichts gesteuert wird. Es werden eben alle Schaltbefehle, solange Strom abgeschaltet ist, ignoriert.Sobald der Strom eingeschaltet wird läuft der Motor problemlos weiter. Habe den Strom abgeschaltet ein paar Sekunden gewartet. Die Rolladen ein Stück heruntergefahren und gestoppt. Wieder Strom abgeschaltet. Dann die Schalter betätigt. Dann wieder Strom eingeschaltet und dann die Rolladen wieder weiterfahren lassen. Auch wärend der Fahrt Sicherung abschalten bewirkt ein Stoppen des Motors. Nach wieder einschalten der Sicherung lief der Motor natürlich nicht weiter. Lies sich aber nach zwei bis drei Sekunden über Befehle hoch und runter fahren. Zum Stromsparen ist das Abschalten also generell eine sehr gute Idee. Fragt sich nur ob es so gut ist die Rolladenmotoren so oft ein und aus zu schalten. Ich glaub die Elektronik wird das auf die Dauer nicht mögen, oder was meint Ihr. Das Ein- und Ausschalten müsste dann ja die Steuerung auch noch machen. Würde dann also bedeuten dass nach dem drücken des Tasters die Rolladenmotoren erst Strom bekommen. Und dann erst 1-2 Sekunden später den Befehl zum fahren bekommen. Also bei jedem ersten Schalterdruck noch eine Verzögerung. Brauchen eure Antriebe auch soviel Leistung im Schlaf?
Danke für das Feedback. Knapp 5W sind schon echt happig. Ich frag mich auch für was... Ich hatte schon die Befürchtung, dass der Rolladen beim Abschalten seine Einstellung vergisst. Einen Vergleich habe ich leider nicht. Bin noch ganz am Anfang was Hausbau betrifft. Mich würden weitere Erfahrungen aber auch sehr interessieren.
IngoF schrieb im Beitrag #4252505 zum Thema "Lebensdauer bei Optokopplern" > Demnach würden LED mit 10mA etwa durchschnittlich 33 Jahre leben. Und > die Photoempfänger wären nicht das Problem. Dann wird die LED mit 2mA > vermutlich noch länger halten. Diese Quelle http://www.vishay.com/docs/80059/80059.pdf besagt, dass nach 100.000h = ca. 11 Jahre der Optokoppler weitgehend "aufgebraucht" ist. Diese Zeitspanne empfinde ich durchaus schon als kritisch - mein Schnittstellenmodul soll länger leben! Deshalb nochmal die Frage, ob mein Schaltungsentwurf so passt. IngoF schrieb im Beitrag #4252505 zum Thema "Stromverbrauch" > Also habe es jetzt mal ausprobiert. > Ich habe einen 7NM-Motor angeschlossen und der zieht 20,5mA im Standby. > (Während er läuft 414mA). Das Problem ist dann in diesem Beispiel mit > 4,7Watt noch größer als gedacht. Ich habe mir zum Testen einen Selve 2/15-SMI besorgt und diesen jetzt testweise mit 230V versorgt. Mein Energiekostenmessgerät meldet einen Standby-Verbrauch von 6Watt. In meinem zukünftigen EFH werde ich 16 dieser Antriebe brauchen und so würde ich auf insgesamt fast 100W permanenten Verbrauch kommen. Das ist definitiv viel zu viel! Im Übrigen frage ich mich, ob hier nicht die EU-Richtline zum Standby-Verbrauch greift und der SMI-Antrieb so eigentlich gar nicht verkauft werden dürfte (http://www.heise.de/ct/artikel/Ein-Watt-Verordnung-291868.html). > Zum Stromsparen ist das Abschalten also generell eine sehr gute Idee. Volle Zustimmung! > Fragt sich nur ob es so gut ist die Rolladenmotoren so oft ein und aus > zu schalten. Ich glaub die Elektronik wird das auf die Dauer nicht > mögen, oder was meint Ihr. Dazu kann ich nichts sagen > Das Ein- und Ausschalten müsste dann ja die Steuerung auch noch machen. > Würde dann also bedeuten dass nach dem drücken des Tasters die > Rolladenmotoren erst Strom bekommen. Und dann erst 1-2 Sekunden später > den Befehl zum fahren bekommen. Technisch sicherlich möglich, sofern man tief genug in die Steuerungssoftware eingreifen kann. Es ist auch zu prüfen, ob sich der Antrieb die aktuelle Position und weitere Konfigurationsparameter merkt. Die "User Experience" wäre aber mies, wenn nach einem Tastendruck keine unmittelbare Reaktion erfolgt. Hmm, aktuell bin ich kurz davor, das Thema "SMI" wieder abzuschreiben und auf klassische rein mechanische Antriebe zu setzen... VG Klaus
:
Bearbeitet durch User
Das Problem wird sein, dass man die Antriebe auch ohne Bus über Taster steuern kann. Die Eigenschaft hat mir auch ganz gut gefallen. Besonders wenn man erst später automatisieren will. Dann hat der Antrieb allerdings keine andere Möglichkeit als die Elektronik aus dem Netz zu versorgen. Einstellungen könnten ja nichtflüchtig gespeichert werden. Aber bei der aktuellen Position habe ich kein gutes Gefühl. Wie ich gelesen habe verwenden die Inkrementalgeber.
Ich vermute mal dass das Energieverschwendungsproblem die Versorgung des mikrocontrollers ist. Der benötigt etwa 20mA. Vermute mal das bei meinem Selve-Antrieb einfach von den "230"Volt alles über 5 Volt verbraten wird. Wenn man also ein Schaltnetzteil das 5V/25mA liefern kann einpflanzen würde der Stromverbrauch auf etwa 0,15W senken könnte (5*20,9mA~0,1W). Nur so ein kleines Schaltnetzteil zu bauen oder zu kaufen ist wohl das Problem. Vielleicht wäre sowas ja eine Möglichkeit: https://www.mikrocontroller.net/articles/Controller_an_230V#Noch_besser:_Schalt-Shunt-Regler Oder vielleicht sind es ja nur die zwei Optokoppler die im Antrieb eingebaut sind und für diesen miesen Standbyverbrauch sorgen.
Das könnte eine Lösung sein. Aber halt auch mit sehr viel Aufwand und Testen und vor allem bevor alles eingebaut ist. Schade, dass im Interface keine Extraversorung nur für die Logik vorgesehen ist. Eine direkte Kommunikation mit dem Antrieb wäre schon ne gute Sache. Ich muss mich mal noch schlauer machen was die anderen Optionen sind. Ich bin da noch sehr am Anfang. Und wie ich gelesen habe, kommts ja auch immer auf den Bauträger drauf an, welche Firmen der so am Start hat und womit die sich auskennen.
Selve hat mir ein Messprotokoll vom SE2/11- SMI zur Verfügung gestellt, das die Konformität mit der EUP- Anforderungen belegen soll. Lt. Selve sind die Messwerte 1:1 auf die anderen Varianten der SE2- Reihe übertragbar. Demnach benötigt der Antrieb im Standby ca. 0,9W Wirkleistung und ca. 5,4VA Scheinleistung. Zwar bezahlt man nur die 0,9W, aber der miese cos phi gefällt mir überhaupt nicht... Grüße Klaus
Also wenn wem der Stromverbrauch nicht paßt, kann er ja gerne die Rolladen händisch mit Kurbel betätigen. Dann spart man auch gleich die teuren Motoren mit ein, und den Verkabelungsaufwand. Von C02-Footprint für die Herstellung der Antriebe und Kabel ganz zu schweigen... Wegen ein paar Watt da rumzunörgeln, bringt doch nichts. Entweder man will die Komfortfunktion "automatische Rolladensteuerung" haben, oder man spart es sich. Wenn einer im Auto Klimaanlage oder Automatikgetriebe haben will, nimmt er auch billigend in Kauf, daß diese den Verbrauch erhöhen.
Hallo Michael, Danke für deinen Beitrag. Möglicherweise liegt ein Missverständnis vor. Es geht mir nicht um den Stromverbrauch im Betrieb, sondern lediglich um den permanent anfallenden Standby-Stromverbrauch. Ich will auf jeden Fall elektrische Rolladenantriebe. Fraglich ist für mich lediglich, ob ich für die zusätzliche Funktionalität "Positionsrückmeldung" und "integrierte Bussteuerung" diesen permanenten Stromverbrauch akzeptieren möchte. Aktuell beantworte ich diese Frage für mich mit "nein" und werde voraussichtlich auf rein elektromechanische relaisgesteuerte Antriebe setzen. Für die Positionserkennung werde ich wohl eine Zeitmessung (Beitrag "Positionserkennung Rollladen") implementieren. Das ist natürlich auch nicht perfekt, aber für mein Anforderungsprofil wohl der bessere Kompromiss. Viele Grüße Klaus
Hallo Klaus, ich habe das schon richtig verstanden. Ein Standby-Stromedarf von 1...2V pro Antrieb kommt bei 10 Antrieben halt auf 15...20W Dauerlast. (ich gehe mal davon aus, daß der Strom im Betrieb vernachlässigbar ist, weil die Motoren ja immer nur ganz kurz laufen, und der Standby den größten Teil des Energiebedarfs ausmacht) Nicht zu vergessen auch der Energieverbrauch des Steuerungs-Gerätes. ich nehme ja da mal an, daß kein AVR oder PIC hinsoll, sondern irgendetwas mit Ethernet-Schnittstelle und Webserver, und da sind dann wohl nochman 20 W zu veranschlagen. Außer es läuft eh schon irgendein Server dauernd, der das mit übernehmen kann. Ich selbst habe in meinem Haus auch keine Rolladenantriebe. Nicht wegen dem Energiebedarf, sondern schlicht und ergreifend wegen der Anschaffungskosten. -Michael
Michael B. schrieb: > Wenn einer im Auto Klimaanlage oder Automatikgetriebe haben will, nimmt > er auch billigend in Kauf Das stimmt. Aber würde Dir die Klima und das Gebriebe über Nacht in der Garage den Tank leerziehen, würdest Du das auch nicht mehr wollen. Dazu kommt noch, zumindest in meinem Fall, auch der Anspruch ein Bussystem möglichst energiesparend aufzubauen. Einfach auch als Ansporn rauszufinden was möglich ist. Und da passt das halt garnicht mit rein.
> Das stimmt. Aber würde Dir die Klima und das Gebriebe über Nacht in der > Garage den Tank leerziehen, würdest Du das auch nicht mehr wollen. Bei den vielen elektonischen Gadgets in heutigen Autos würde es mich nicht wundern, wenn zumindest nach einiger Zeit die Batterie leer ist... > Dazu kommt noch, zumindest in meinem Fall, auch der Anspruch ein > Bussystem möglichst energiesparend aufzubauen. Einfach auch als Ansporn > rauszufinden was möglich ist. Und da passt das halt garnicht mit rein. OK, das stimmt. Dann muß man halt wie von Klaus vorgeschlagen, einfache klassische Motoren nehmen und die selbst ansteuern. In einer Eigenbau-Steuerung kann man dann solche Dinge wie Energieeinsparung priorisieren.
In gewissen Grenzen schon. Aber da hast Du auch trotz allen Anstrengungen ein Netzteil was ein rund um die Uhr Verluste produziert. Wenn Du Dir ne SPS in den Schaltschrank setzt wird die auch die ganze Zeit ein paar Watt brauchen. Da kommt man nicht, oder nur mit viel Aufwand drum rum. Das sind dann aber einmalige Sachen mit denen man leben muss. Bei den Antrieben machts halt die Summe. Klar, ein Antrieb mit einem Interface wird immer Strom brauchen. Ich weiss nicht wie die Elektronik aufgebaut ist. Das Problem wird wohl wirklich sein, dass jeder Antrieb seine Elektronik aus dem Netz versorgt. Beim ersten lesen, dachte ich die werden vom Bus versorgt, weil ich immer was von 24V gelesen habe. Aber nachdem ich mir das Planungshandbuch mal angeschaut habe, habe ich meinen Irrtum bemerkt.
Hallo Michael, ich habe von meinem Studienfach aus ein Projekt in dem ich einen SMI-Motor von Dunker (D370-SMI) ansteuern soll. Dies soll ich mithilfe eines Mircocontrollers (Stellares EKK-LM3S8962) und einer von mir gebauten Schaltung realisieren. Die einzigen wirklichen nützlichen Informationen habe ich nur hier gefunden. U.a. deinen Schaltplan. Bin relativ neu in der Praxis der Elektrotechnik und wollte daher einfach fragen, ob diese Schaltung auf für meinen Mircocontroller verwendet werden kann. Ich bin über jede zusätzliche Info oder Informationskontakt dankbar, da ich mit meinem Projekt ein bisschen am verzweifeln bin :) Grüße Florian
Hallo Florian, Meinst Du dieses Schaltungen? Beitrag "Re: Gibt es irgendwo brauchbare Infos zu SMI ?" Beitrag "Re: Gibt es irgendwo brauchbare Infos zu SMI ?" Die kann man problemlos an einen Mikrocontroller anschließen. Ist TTL-Pegel und kein RS232. Es gabe irgendwo noch eine Umfangreichere Schaltung die ich gerade nicht mehr finde.. Gruß Ingo
Angehängte Dateien:
-

Schaltplan_Michael.png
95 KB

{kind=link}
Hallo Ingo, vielen Dank erstmal für die schnelle Antwort. ich meinte zuerst den Schaltplan von Michael (siehe Anhang). Es ist prinzipiell egal, mit welcher Schaltung ich das realisiere. Es muss erstmal "nur" funktionieren :) Ziel des Projekts ist es aber den Motor mithilfe des oben genannten Mikrocontrollers anzusteuern. Gibts denn eine geeignetere Schaltung für mein Projekt? Gruß Florian
Hallo Florian, konnte keine Information finden welches CPU-.Modul Michael verwendet hat. Es muss wohl ein Ethernet-Interface haben. @Michael: Bin jetzt auch neugierig geworden. Was für ein CPU-Modul hast DU verwendet? Im Moment habe ich 16 Motoren verbaut und überlege mir gerade wie ich den 17 Motor ansteuere.. Das fertige Steuerungsmodul (für 600€) taugt nicht wirklich viel und es gibt nervige Softwarebugs die der Hersteller immer noch nicht beheben will. Würde gerne das Modul entsorgen und mir was brauchbares selber programmieren. Ein Ethernet-Interface würde sich gerade anbieten. Wollte kein 5-Meter USB-Kabel nehmen. Wie hats Du das CPU-Modul programmiert? Vielleicht könnte man zusammen die Software weiterentwickeln. @Florian, Wenn Du nicht das selbe CPU-Modul hast wirst Du vermutlich die zusätzlichen Schalter und Verbinder an deine CPU anpassen müssen. Dier SMI-Teil ist ja in allen drei Schaltbildern eigentlich der selbe. Deine CPU wird am Seriellen Port auch nur TTL und kein RS232 haben. ALso einfach anschließen und glücklich werden. @all könnte auch gerne ein Wiki auf meinem Serve zum SMI-Bus erstellen auf dem alle interessierten zugriff bekommmen können. Wäre auch schön wenn man zusammen die SOftware weiterentwickeln könnte... Gruß Ingo
Hallo zusammen, bei mir hat das Thema SMI jetzt auch wieder an Aktualität gewonnen. Die Grobplanung des Hauses ist abgeschlossen, jetzt gehts ans Feintuning :) Die meisten Fenster werden mit Rolläden ausgestattet. Das werden ganz normale elektrische. Da bin ich grade ne Steuerung am basteln. An der Südseite finde ich allerdings Jalousien ganz sinnvoll. Und da würde sich SMI dann anbieten. Die Schaltung von oben werde ich auch in großen Teilen übernehmen, da sie sich wohl bewährt hat. Was ich bis jetzt noch nicht klären konnte ist, ob sich der Winkel der Lamellen wirklich über ein SMI-Kommando einstellen läßt. Weiß da einer von Euch mehr darüber? Die Links hier sind ja teilweise schon recht alt und führen ins Nirvana. IngoF schrieb: > Im Moment habe ich 16 Motoren verbaut und überlege mir gerade wie ich > den 17 Motor ansteuere.. Nach meinem Kenntnissstand brauchst Du für den 17. einen 2. SMI Kanal. Ausser du nimmst einen mit einer anderen Herstellerkennung. So wie ich das Protokoll interpretiere sollte es "theoretisch" möglich sein pro Herstellerkennung 16 Rolläden zu Adressieren. Zumindest sind diese Informationen in unterschiedlichen Nibbles codiert. So habe ich das zumindest verstanden. Bisher habe ich nichts aufgebaut und auch keinen Antrieb zum probieren. Noch eine Frage: Bei Jalousien brauche ich ja einen Sturmwächter. Die Eltako-Steuerungen haben einen Eingang dafür. Wie sieht das denn bei SMI aus? Hat die gekaufte Steuerung auch sowas? Das müsste bei einem Sebstbau dann auch imolementiert werden.
:
Bearbeitet durch User
Hallo Florian und Ingo, ich habe dieses "ALL5002"-CPU-Modul von Allnet verwendet: http://www.allnet.de/de/allnet-brand/produkte/entwicklungsplatformen/p/allnet-all5002cpu-cpu-board-ralink/ Das bauen wir auch in den meisten unserer Gebäudeautomationsprodukte ein, somit war dann von der Software-Seite her wenig zu tun.
Pro SMI-Port können nur 16 Antriebe verwendet werden. Egal welcher Hersteller. Die Antriebe bekommen eine ID (0-15) zugewiesen. Alle weiteren Antriebe benötigen einen weiteren SMI-Port. An meine SMI-Einheit kann ein Interface für einen zweiten SMI-Port angeschlossen werden. Aber statt 300€ auszugeben würde ich den sowieso selber bauen. Da der Hersteller die Software nicht pflegt könnte ich die Hardware "erkunden" und dann selber eine brauchbare Software schreiben. Wäre allerdings einiges an Arbeit. Ein Neuentwicklung wäre also einfacher. Bad U. schrieb: > Wie sieht das denn bei SMI > aus? Hat die gekaufte Steuerung auch sowas? Das müsste bei einem > Sebstbau dann auch imolementiert werden. Um Missverständnisse vorzubeugen. SMI ist ja kein Hersteller. Wollte nur den Hersteller nicht nennen. Meine SMI-Stuerung hat auch drei Eingäne (Regen, Wind, Sonne). Für den Wind ist das nur ein digitaler Eingang an dem das Reed-Relais vom Windmesser angeklemmt wird. An der Frequenz wird die Windstärke bemessen. Die Eingänge sollten nicht wirklich ein Problem sein. Michael Buchstaller schrieb: > Das bauen wir auch in den meisten unserer Gebäudeautomationsprodukte > ein, somit war dann von der Software-Seite her wenig zu tun. Das Modul wird dann wohl in C-programmiert, oder? Schätze mal das dort kein zweiter Serial-Port vorhanden ist. Der müsste dann per Soft-UART nachgebastelt werden. Eigentlich schwebt mir ein Modul vor dass ind in ein Hutschienengehäuse passt. Würde kein Display nehmen und die ganze Programmierung über den PC machen wollen. Am besten auch gleich zwei SMI-Ports. Denke mit zwei SMI-Ports sind die normalen "Heimandwendungen" abgefrühstückt. Was denkt Ihr so? Gruß Ingo
IngoF schrieb: > Pro SMI-Port können nur 16 Antriebe verwendet werden. Egal welcher > Hersteller. Die Antriebe bekommen eine ID (0-15) zugewiesen. Alle > weiteren Antriebe benötigen einen weiteren SMI-Port. Ok. Das ist ja auch offiziell so beschrieben. Wie gesagt, ich habe da noch nichts versuchen können. Meine Hauptinformationsquelle ist dieser Thread hier. Aber gerade beim Selbsbau ist ein zweiter Kanal auch keine so große Sache. Ein Mehraufwand ja, aber im Vergleich zu den Kauflösungen doch sehr günstig. IngoF schrieb: > Um Missverständnisse vorzubeugen. SMI ist ja kein Hersteller. Wollte nur > den Hersteller nicht nennen. Das ist mir klar. SMI ist ein Standard den mehrere Hersteller anbieten. Auch mit herstellerspeziefischen Erweiterungen. Welche das auch sind. Deshalb ja auch meine Frage nach der Steuerung des Lamellenwinkels. Das scheint mir der größte Vorteil bei SMI zu sein, wenn man selbst steuern möchte. IngoF schrieb: > Meine SMI-Stuerung hat auch drei Eingäne (Regen, Wind, Sonne). Für den > Wind ist das nur ein digitaler Eingang an dem das Reed-Relais vom > Windmesser angeklemmt wird. An der Frequenz wird die Windstärke > bemessen. Die Eingänge sollten nicht wirklich ein Problem sein. Das sehe ich auch so. Aber Wind sollte auf jeden Fall von anfang an funktionieren. Der Rest ist Nice-To-Have.
Hallo Ingo, Hallo Michael, danke vielmals für die Antworten. @Ingo Das mit dem Wiki wär ne super Sache! IngoF schrieb: > Wenn Du nicht das selbe CPU-Modul hast wirst Du vermutlich die > zusätzlichen Schalter und Verbinder an deine CPU anpassen müssen. Was meinst du damit genau? @Michael Vorgabe unseres Projektes ist es dieses Board zu verwenden. http://users.ece.utexas.edu/~valvano/EE345M/LM3S8962EvalBoard.pdf Den Hardwareaufbau können wir ja mehr oder weniger von dir übernehmen oder? Sonst noch irgendwelche Tipps? Dann mach ich mich mal ans Bestellen :) Gruß und einen schönen Abend!
Den zweiten SMI-Port müsste man dort Softwareseitig machen. Eventuell wäre es ja möglich noch einen kleinen PIC oder sonstigen Prozessor früher oder Später als Erweiterung zu verwenden? Also z.B. bei den SMI-Protokollen einfach vorne ein Byte anhängen für den SMI-Port. Dann könnte man das sogar auf 256 SMI-Ports aufrüsten ;-) Oder auch über den SPI-Bus den "Kommunikationskontroller" verbinden. Den ersten Port Wie wollte Ihr das mit den Schaltern machen? Bei mir sind Aktoren bereits verbaut die über RS485 kommunizieren. Das Protokoll davon ist mir auch schon bekannt und wäre kein Problem solche Platinchen mit diesem Protokoll zu füttern. Gibt es aber auch schon fertig zu kaufen. Der Winsensor sollte kein Problem sein. Gibt es ja fertig zu kaufen es müsste nur programmiert werden ab welcher "Frequenz der Alarm" generiert wird. @Michael: Du kennst ja das CPU-Modul schon besser. Das dürfte doch kein Problem machen, oder? Oder hast Du das alles schon bereits programmiert? Gruß Ingo Oder habt Ihr keine Schalter und alles wird über das Handy oder PC gemacht? Ich werde dann mal eine zweites Wiki für SMI auf meinem Server einrichten und mit einigen Infos füttern.
Mein Plan ist erstmal die Steuerung für die anderen Rolläden um einen SMI-Port zu erweitern. Dort sitzt ein PIC dessen UART ich mal für SMI vogesehen habe. Den Rest muss ich halt programmieren. In der Planung sind Rolladentaster und keine Schalter. Ich finde da hat man mehr Freiheitsgrade. IngoF schrieb: > Ich werde dann mal eine zweites Wiki für SMI auf meinem Server > einrichten und mit einigen Infos füttern. Hättest Du da vielleicht mal einen Link? Vielleicht hab ich es ja auch hier überlesen. Ich kannte bisher nur Deine Beiträge in verschiedenen Threads hier über SMI.
Bad U. schrieb: > Hättest Du da vielleicht mal einen Link? Jain. ist noch in Arbeit.. Bad U. schrieb: > In der Planung sind Rolladentaster und keine Schalter Meinte ich ja. Ich habe Taster die über SMI-Bus-Aktoren zu meiner Control-Unit verbunden sind. Die laufen über RS485. Vermutlich ist es einfacher diese zu kaufen als nachzubauen. Habe bei mir etwa 20 Stück davon verbaut. Hast Du Schaltpläne Zu Deiner Steuerung? Oder ist das auch das CPU-Modul von Michael?
IngoF schrieb: > Jain. ist noch in Arbeit.. Das werde ich mir auf jeden Fall anschauen. IngoF schrieb: > Meinte ich ja. Ich habe Taster die über SMI-Bus-Aktoren zu meiner > Control-Unit verbunden sind. Die laufen über RS485. Ich plane bei unserem Neubau eine zentrale Verdrahtung. Ich will alle Taster in der UV auf SSS legen um das dann später auch automatisieren zu können. Genauso habe ich das mit den Rolladentastern vorgesehen. Da bin ich am flexibelsten und kann nach und nach automatisieren. IngoF schrieb: > Hast Du Schaltpläne Zu Deiner Steuerung? Oder ist das auch das CPU-Modul > von Michael? Ich plane einen Hausbus der über CAN kommuniziert. Bei den Knoten, und das wird mein "Rolladenaktor" dann sein, nutze ich PIC18 aus der 66k80 Familie. Die zentrale Steuerung wird in Richtung SPS gehen. Also keine besondere Intelligenz des Aktors. Nur Vorverarbeitung und, wenn nötig, Protokollumsetzung. Der Schaltplan für den Rolladenaktor ist grade im werden :) Beim SMI-Teil will ich die hier bewährte Schaltung übernehmen.
:
Bearbeitet durch User
Habe eine Rolladenplatine mit PIC18F2680 inkl CAN-Bootloader gebastelt die ganz gut laufen. Allerdings sind die bei mir nur für Temperaturen, Kontakte und den Thermoelektrischen Stellantrieb der Heizkörper zuständig. Bad U. schrieb: > SSS Sagt mir jetzt nichts..
IngoF schrieb: > Habe eine Rolladenplatine mit PIC18F2680 inkl CAN-Bootloader gebastelt > die ganz gut laufen. Da sind wir ja in ähnlicher Richtung unterwegs :) Ich habe die K-Serie verwendet, da ich alles mit 5V betreibe. IngoF schrieb: > Bad U. schrieb: >> SSS > > Sagt mir jetzt nichts.. Stromstoßschalter :)
Hallo, ich habe soeben ein Wiki erstellt. Noch steht nicht wirklich drin. Im Moment kann man sich noch registrieren. Wer möchte kann sich ja schon mal registrieren und neue Seiten erstellen... http://smiwiki.thefischer.net Gruß Ingo
Danke für Deine Mühe. Ich wünsche Euch allen einen guten Rutsch. Bis zum nächsten Jahr VG
Florian Hartmann schrieb: > http://users.ece.utexas.edu/~valvano/EE345M/LM3S8962EvalBoard.pdf Habe mir die Platine gerade mal angesehen. Hat ja alles was das Herz begehrt. CAN, DIsplay, USB, Taster,... Also eigentlich alles was so ein SMI-Steuerung haben muss. Soll drei UARTS haben. UART0 über USB oder Stifte 8/9 UART1 über Stifte 18/19. UART2 konnte ich noch nciht finden. Ist das Stift4/5 (SSITX/SSIRX)? Diese werden für den SD-Slot und OLED-Display verwendet. Dann könnte man also schon 2 SMI-Port Wie sieht das mit der Programmierung aus. Muss man dort von 0 anfagen oder gibt es da schon einen TCP/IP Bibliothek die man benutzen kann? Wie sieht es mit einem Webserver aus? Oder gibt es da sogar eine Linux für? Also ich habe noch mal mit meinem Interface herumexperimentiert. Habe es schon mal geschafft über meine Diskstation und ein USB-Kabel Befehle an den SMI-Bus zu senden. Allerdings gibt es da noch keine Software die ich dann selber in C programmieren muss. Mit Befehlen über die Konsole klappt es schon mal provisorisch., Über "ECHO kann ich Befehle senden auf die die Antriebe auch reagieren. Allerdings wird über ECHO noch ein LineFeed mitgeschickt. Über CAT oder SCREEN Kann ich empfangen. Allerdings klappt die HEX-Ausgabe noch nicht. Mit STTY kann ich die Werte für den Port setzen. Die Prüfsumme ist auch ganz simple aufgebaut. Überprüfen einfach durch addieren. Also Prüfsumme müssen die untersten 8 Bit der Prüfsumme 0 ergeben. Also zum Prüfsumme berechnen alle Bytes addieren. Daraus das 1er Komplement erzeugen (negieren und +1). Die untersten 8 Bit sind dann die Prüfsumme.
Hallo Ingo, ja die Bibliotheken müssten vorhanden sein. Ich arbeite mit der Software Code-Composer-Studio (CCS-6.1.0). Vielen Danke für deine Bemühungen. Gruß Florian
Jetzt habe ich wieder mal etwas Zeit mich mit dem Thema zu beschäftigen. Und da habe ich auch gleich noch eine Frage :) Unser Bauunternehmer arbeitet bei Fentern mit Weru zusammen. Die bieten auch elektrische Antriebe an. Die kaufen sie nach meinen Recherchen wohl von Somfy zu. Bei Somfy gibts ein eigenes Smart-Home System namens TaHoma. Laut Website ist es auch hier möglich Position und Lamellenwinkel zu bestimmen. Allerdings habe ich nirgends einen Hinweis zu SMI gefunden. Weiß jemand von Euch ob das bei Somfy auch SMI ist, oder die ihr eigenes Süppchen kochen? Sonst müsste ich mal nachfragen ob es möglich wäre auch Antriebe von anderen (SMI-) Herstellern zu bekommen. Aber bei Sonderwünschen reagieren Die Baulöwen eher allergisch, wie ich zu meiner Verwunderung feststellen musste...
Somfy scheint kein SMI-Group-Mitglied zu sein: http://standard-motor-interface.com/mitglieder-2/ Nach Wikipedia scheint es EnOcean zu sein. https://de.wikipedia.org/wiki/Enocean#Produkte Deemnach sind es wohl Funkantriebe? Oder gibt es von Somfy auch Kabelgebundene Motoren?
Bad U. schrieb: > Aber bei Sonderwünschen > reagieren Die Baulöwen eher allergisch, wie ich zu meiner Verwunderung > feststellen musste... Eigentlich sollte es ja egal sein welche Motoren die einbauen, oder? Wenn es natürlich Funkmotoren sind wäre das vielleicht eine Erklärung. Bei Funk müssen weniger/keine Kabel verlegt werden. Oder sind die nur zu faul auch mal woanders zu bestellen?
IngoF schrieb: > Somfy scheint kein SMI-Group-Mitglied zu sein Ja, über Somfy habe ich da auch nix gefunden. IngoF schrieb: > Oder gibt es von Somfy auch > Kabelgebundene Motoren? Da muss ich nochmal nachschauen. Ich meine aber auch Somfy schon in Verbindung mit Kabelmotoren gelesen zu haben. IngoF schrieb: > Eigentlich sollte es ja egal sein welche Motoren die einbauen, oder? > > Wenn es natürlich Funkmotoren sind wäre das vielleicht eine Erklärung. > Bei Funk müssen weniger/keine Kabel verlegt werden. > > Oder sind die nur zu faul auch mal woanders zu bestellen? Jain... Bei Weru ist es so, dass dann Fenster und Rolladen als Einheit geliefert und eingebaut werden. Das ist wohl gerade bei der Dichtigkeit ein Plus. Ich bin auch nicht sicher ob da nur Somfy Antriebe zum Einsatz kommen. Ich bin bei meiner Recherche nur mal auf die Verbindung zwischen Weru und Somfy gestoßen. Ich habe mich auch schon mit anderen Bauherren des selben Bauunternehmers unterhalten. Die hatten auch die Kombifenster mit Rolladen oder Jalousie von Weru. Da war aber alles ganz normal kabelgebunden. Vielleicht ist EnOcean ja nur deren smarte Lösung.
:
Bearbeitet durch User
Hat schon mal jemand herausgefunden wie die Adressen der angeschlossenen Motoren ermittelt werden und die IDs den Motoren zugewiesen werden? Neue Motoren haben ja alle die ID 0. Gruß IngoF
Hallo Ingo, Deine Frage ist zwar schon ein Weilchen her - aber ich bin jetzt erst heute in das Thema eingestiegen. Ich habe mir einen Selve SE 2/15 SMI-Motor besorgt und Deine Schaltung nachgebaut. Hat auf Anhieb funktioniert. Unter http://standard-motor-interface.com/entscheiden/technik/ gibts dann den EasyMonitor zum Runterladen. Mit dem konnte ich jetzt meinen Motor mal rauf-/runterfahren, Positionen einspeichern und anfahren. Mit dem Free Device Monitoring Studio kann man parallel auf dem seriellen Port mithören/debuggen. Ich habe dann mal die Adresse vom Motor testweise geändert: Von Slave-Adresse 0 zu 1. Das war das abgehörte Kommando: 44 FD B8 00 0F 1F 3C 01 9C Dý¸...<.œ und dies die Antwort des Motors: 44 FD B8 00 0F 1F 3C 01 9C FF Dý¸...<.œÿ Wobei B8000F1F meine Motoradresse ist. Setzen der Slave-Adresse 10 gibt folgende Kommandos: 44 FD B8 00 0F 1F 3C 0A 93 Dý¸...<.“ und Motorantwort: 44 FD B8 00 0F 1F 3C 0A 93 FF Dý¸...<.“ÿ Und zurück auf Adresse 0: 44 FD B8 00 0F 1F 3C 00 9D Dý¸...<. und 44 FD B8 00 0F 1F 3C 00 9D FF Dý¸...<.ÿ Ich habe jetzt allerdings auch noch ein Problem: Wie kann ich die Endlagen einstellen? Gefühlt macht der Motor viel zu wenig Umdrehungen, um damit meinen Rollo komplett abwickeln zu können... Außerdem, wenn ich "ganz nach oben" fahre, dann fährt er nur bis zu etwa 23% hoch - weiter gehts's nicht. Weiss jemand, wie ich den Wickelbereich erweitern kann - ich denke also, die Endlagen verändern kann?? Mein Motor braucht übrigens im Standby 0,9W und im Leerlauf ca. 145W... Viele Grüße, Martin
:
Bearbeitet durch User
Bei meinen Warema-Raffstoren wurden die Endlagen mit einem speziellen Programmiergerät eingestellt, das ich auch einige Tage ausleihen konnte. Wobei dieses sicherlich nicht mehr gemacht hat, als wie bei den meisten Rollläden gleichzeitig hoch und runterzufahren. Es sendet also keine SMI-Befehle und enthält keine Elektronik! Es schaltet SMI+ gegen Phase um manuell hochzufahren, SMI- um runterzufahren (oder andersrum) und SMI+ sowie SMI- gegen Phase gleichzeitig um die aktuelle Position zu speichern. SMI hat wohl Befehle um 2 besondere Positionen anzufahren und zu programmieren, aber ich glaube die bieten keinerlei Mehrwert irgendeiner Art und haben nichts mit den Endlagen zu tun.
Also über den SMI-Bus ist ein Abspeichern der Positionen wohl nicht festgelegt. Die Selve-Rolloantriebe benötigen zum einmaligen Einstellen der Anschlagpunkte den Einstellschalter (Selve 290103). Habe mal nachgemessen. Beim betätigen von Taster "E" liegen an Auf und Ab 115 Volt Beim bestätigen der Schalter für Auf und AB liegt dann jeweils 230 Volt auf dem Eingang. Habe meinen Schalter nicht geöffnet der Schaltplan scheint dann wohl zu stimmen: Beitrag "Rolladenmotor-Einstellschalter selber bauen" Vor Was die Dioden sollen ist mir allerdings unklar. Vielleicht falls der Schalter falsch angeklemmt wird N und L auf die Eingänge I- und I+ dass es dann keinen Kurzschluss gibt? Mit den Selve-Rolladen habe ich dummerweise zwei kaputte Motoren erwischt. Das habe ich allerdings festgestellt als ich sie nach Ablauf der Garantie oder Gewährleistung einbauen wollte. Falls Dein Motor im Versuchsaufbau also kurz brummt und erst einen Bruchteil der Sekunde Später erst anfängt zu drehen sofort umtauschen. Selve zeigt nicht wirklich Kulanz und scheint meine Anfragen zu dem Motoren einfach zu ignorieren. Die Fehler in der SMI-Control-Unit haben über drei Jahre gebraucht bis sie mal ausgebügelt wurden. Erst dann als die Control Unit nicht mehr funktionierte weil der 16 Motor angeschlossen wurde. Aber vermutlich ist das der Grund warum die Produktion der Control-Unit eingestellt wurde.
Vielen Dank für eure Hilfe! Ich habe mir mal so einen Einstellschalter mit zwei Dioden gebaut und konnte damit die Endlagen des Motors einstellen. Ich denke, ich habe damit alles zusammen, um eine Ansteuerung über Homematic damit bauen zu können (einen Homematic-Rolladenaktor, der einen SMI-Bus bedienen kann). Hardware muss allerdings noch gebaut werden und Software dazu umgeschrieben werden... Zum Motor selber nochmal: Wenn das Relais klackt, dann läuft der Motor sofort los - hört sich also gut an. Allerdings wird er schnell heiss (4x rauf/runter, dann kann man ihn kaum noch anfassen). Im Leerlauf braucht er schon 145W, auf dem Typenschild sind max. 157W angegeben. Warum er auch schon im Leerlauf so viel braucht - keine Ahnung. Allerdings ist ja auch ein Kurzzeitbetrieb von max. 4 Min. vorgesehen, sowie eine thermische Abschaltung. Was der Motor (Typ SE 2/15-SMI) noch eingebaut hat ist so eine Art Drehmomentabschaltung, allerdings nur für die "Ab"-Richtung. Wenn sich das Rohr gegenüber der Seitenbefestigung um ca. 1cm verdreht, dann schaltet er ab bzw. in der anderen Richtung wieder ein. Diese Abschaltung spricht aber schon bei sehr geringem Drehmoment an. Bin mal gespannt, wie sich das im eingebauten Zustand auswirkt. Die Drehrichtung kann man softwaretechnisch nicht umstellen, oder? Bei manchen Rollos kommt der Motor links, bei manchen rechts rein. Dann ist natürlich die Drehrichtung vertauscht. Damit sind auch "Auf" und "Ab" vertauscht und damit die 0% und 100% Positionen. Oder verstehe ich da noch was falsch? Viele Grüße, Martin
Martin P. schrieb: > > Die Drehrichtung kann man softwaretechnisch nicht umstellen, oder? Nach der oberen und unteren Position kennt der Motor auch die richtige Drehrichtung
Stimmt, ich habe jetzt mal mit der "Auf"-Taste den unteren Punkt zuerst eingestellt, dann mit der "Ab"-Taste den oberen Punkt und fortan ist die Drehrichtung und alles sonstige umgestellt - würde also für die andere Richtung auch wieder komplett alles stimmen (0% oben, 100% unten), Auf/Ab-Tasten stimmen dann auch wieder... Martin
Martin P. schrieb: > Warum er auch schon im Leerlauf so > viel braucht - keine Ahnung. Wie hast Du denn die Leistung im Leerlauf gemessen? Nur Strom mit einem Multimeter oder ein kleiner steckbarer Leistungsmesser mit Stecker und Steckdose der auch die eventuelle Phasenverschiebung von Strom und Spannung berücksichtigt? Hat jemand mal Motoren von anderen Herstellern im Leerlauf getestet? Haben die auch so einen hohen "Leerlaufverbrauch". Ist das vielleicht Bauartbedingt durch die Mehrstufigen Planetengetriebe im Rohrmotor?
Martin P. schrieb: > Im Leerlauf braucht er schon 145W, auf dem > Typenschild sind max. 157W angegeben. Mein defekter Motor ist ein SE 2/7 SMI. Laut Typenschild hat er 95 Watt. Auf dem Tisch zieht er wenn er blockiert und brummt 103W. Falls er läuft benötigt er nur noch 92W. Im Ruhezustand benötigt der Motor etwa 1,3 Watt (20mA mit Powerfaktor 0,3 bei 218V) Wenn ich versuche den Motor mit der Hand festzuhalten verändert sich die Leistungsaufnahme nicht. Allerdings schaffe ich es auch nicht ansatzweise den Motor wirklich festzuhalten. Mich würde mal interessieren ob es bei anderen Herstellern mit dem Stromverbrauch genauso aussieht.
Im Ruhezustand zieht die Elektronik bei mir 0,9W, ohne Powerfaktor waren es über 5W. Gemessen habe ich das mit einem relativ guten Leistungsmeßgerät (das von ELV - hat den gleichen Chip wie in einigen Stromzählern). Die 145W sind mit Powerfaktor gemessen (analog zu den 0,9W oben). Per Hand den Motor anhalten schaffe ich ebenfalls nicht. Ob sich dabei die Leistungsaufnahme erhöht, habe ich nicht nachgemessen (Versuchsaufbau ist leider wieder abgebaut). Nun ja, er soll ja auch mal 3,5qm Rolladen nach oben ziehen. Da braucht er schon ein bisschen Kraft. Aber eine Überlasterkennung soll wohl schon drin sein - nicht dass er einen festgefrorenen Rolladen auseinander reisst... Wie schon erwähnt, der Motor tut all das (bis jetzt) was ich erwarte (Positionierung, Rückmeldung, Rechts-/Linkseinbau), so daß ich mich jetzt an den Homematic-Aktor-Bau machen kann. Martin
IngoF schrieb: > Hat jemand mal Motoren von anderen Herstellern im Leerlauf getestet? > Haben die auch so einen hohen "Leerlaufverbrauch". > > Ist das vielleicht Bauartbedingt durch die Mehrstufigen Planetengetriebe > im Rohrmotor? Kann ich mir nicht vorstellen, daß das Getriebe die ganze Leistung aufbraucht - dann bleibt ja für die eigentliche Aufgabe nix mehr übrig :-) Ich denke, daß das bei dem Motor bauartbedingt ist. Nicht umsonst haben sie Kurzzeitbetrieb mit max. 4 Min. angegeben sowie einen Thermoschalter eingebaut. Martin
Martin P. schrieb: > Ich denke, daß das bei dem Motor bauartbedingt ist. Habe heute einen Becker-Motor getestet. Der hat auch die volle Lastaufnahme im Leerlauf. Bei Selve-Motor habe ich mal testweise eine 10NM und 7NM Elektronik und Motor untereinander getauscht. Die Elektronik bestimmt die Leistungsaufnahme. der 7NM-Motor nimmt mit 10NM Elektronik die Leistung vom 10NM-Motor auf. Ich habe damals den Fehler gemacht eine fertige Steuerung vom Motorhersteller zu nehmen. Da die absolut Verbraucherunfreundlich Programmiert ist programmiere ich gerade meinen SMI-Server. Im Moment wird also alles über den SchalterBus über meinen SMI-Server gesteuert. Der SMI-Server simuliert den Tastendruck. Die Steuerung steuert den Motor an. Über den SMI-Bus wird die Position ausgelesen und die openHAB Items aktualisiert. Die Steuerung funktioniert über die Taste oder openHAB (Handy). Der SMI-Server läuft auf meiner Diskstation (läuft auch auf einenm Raspi). Die Busse sind dort über USB angebunden. Natürlich wird alles in Zukunft ohne die "alte" Steuerung laufen. Da ich jetzt endlich den 17 Motor einbauen will benötige ich einen zweiten SMI-Bus. Bei der Trennung hätte ich dann 5 und 12 Motoren Am liebsten wäre mir ein 2-Port SMI-Interface das ein Ethernet-Interface hätte. Sowas scheint es wohl nicht zu geben. Hat sich jemand schon soetwas gebaut? Als Alternative würde ich mich an einem 4-Port USB-FTDI-Interface wagen. Also 2 SMI-Busse 1 Schalter BUS (RS485). Der vierte währe dann umschaltbar zwischen RS485 (SchalterBus, SMI) oder RS232-TTL(
Hallo zusammen, ich suche schon eine Weile im Netz nach dem Thema SMI und der Ansteuerung der Motoren und habe nichts gefunden wo dieses Thema so gut aufbereitet worden ist wie hier. Vielen Dank dafür. Wir haben vor 4 Jahren mit einem Bauträger gebaut und ich habe mich zu diesem Zeitpunkt nicht wirklich mit dem Thema der elektrischen Rollläden befasst. Wichtig war nur, dass die Rollläden elektrisch sind. Wir haben auch kein BUS-System oder ein Smarthome über den Bauträger bezogen. Bei uns wurden trotzdem SMI Rollläden eingebsaut und als Taster-Variante verkabelt. Nun wollte ich die Taster mit HomematicIP bzw. Shelly 2PM Komponenten austauschen und bin über die Problematik mit der Ansteuerung gestolpert. Diese Geräte gehen stets davon aus, dass die Rollläden dann verfahren, wenn eine Leitung mit 230V bestromt wird. Somit ist eine Positionierung des Rollladens über diese Aktoren nicht möglich. Es scheint am Markt auch nichts für Unterputzdosen zu geben, die dann einen Rollladen über den SMI BUS ansteuern und parallel über Funk oder WLAN Schnittstellen zur Verfügung stellen. Wenn ich die Lösungen hier im Forum richtig verstanden habe, sind diese für einen BUS ausgelegt, an dem alle oder zumindest max 16 Komponenten angeschlossen sind. Dies ist bei mir ja nicht der Fall. Mir fehlt leider auch das Wissen, wie ich eine möglichst kompakte Schaltung für die Unterputzdose realisieren kann. Hat dies schon jemand probiert bzw. hier Erfahrungen gesammelt? @Martin P. Du hattest geschrieben, dass du mit Homematic Komponenten versucht hast die SMI Motoren anzusteuern. Bist du erfolgreich gewesen? Viele Grüße Eddi
I am reverse engineering the SMI interface for my HAWA shutter motors. I got the SELVE 295910 SMI to RS232 and got most commands listed in the wiki here: https://smiwiki.thefischer.net/doku.php?id=wiki:smi:telegramme working. However, the with the Selve I can only talk (and listen) to the motors. For reverse engineering purposes I'd like to be able to listen to other devices on the bus that are currently sending commands to the motors. Anyone any hints for how to do that?
IngoF, Thanks for the wiki! While I got most of it working I'm still struggling to set motor IDs. The example from the wiki seems incomplete: Example: Reset ID 0x3C 0x00 I suppose, such command would be of the following form: [set commnd][manufacturer ID][desired motor number 1-15] Can you help pointing me in the right direction?
There are example for command parts. For the command 0x3C 0x00 you must calculate the checksum also. Example in the blue box at the bottom of the page. I suppose that should be 0xC4. You can check the checksum if you add all bytes including the checksum an get 0x00 as result if you ignorieren the overflow.
But I have multiple motors on the same bus. Which one will be set and to what number?
Sorry, i forgot to say that 0x3C is only a Part of the message. 0x3C 0x0F Sets the ID of the adressed drive to ID 15. The adressing is doe in the same command. You can Adress the drivrs by its id ld (New drives have ID 0). I will see if i can find same time at the weekend. I am verry busy on Weekkdays. Do you have a Controller to reversengeneeeing or only drives and the gateway. You can not use two of these Gateways on the same Bus in Mastermode. Maybe you can not Set these Gateways in Slavemide. Or do you have a jumper or switch in the gateway.
Thanks for your reply, let me try that - also in the weekend. I have a Warema SA16M230 actuator in combination with 15 Hawa 230 SMI motors. And I'm trying to listen in on the bus using a Selve RS232 to SMI gateway. Indeed, as you say, I cannot have two masters on the same SMI bus. When I do connect it anyway, I can receive the messages the motors are sending back to the actuator but I cannot see the messages the actuator is sending to the motors. Being able to see the messages the actuator is sending would be very valuable to figure out the command structure. There are no switches on my Selve gateway. I am hoping to find a (simple) electronic adjustment to get this working. With only the gateway and the motors connected I can control the motors through SMI, move up/down and to percent position. I haven't (yet) figured out how to set an ID to a motor that has no ID yes (has ID=0). I haven't figured out how to see if the motor had an error, is stuck, or stopped because of an external event. Neither do I know how to retrain the stops at the beginning and end of the rail.
I found one command that has "??" on the wiki: https://smiwiki.thefischer.net/doku.php?id=wiki:smi:telegramme command 28 (0b00011100) : queries the engine ID.
Bastiaan B. schrieb: > I found one command that has "??" on the wiki: Wich command do you mean? I placed three Question marks if i do not know what the bits or byte are for. > command 28 (0b00011100) : queries the engine ID. Do you have an example of an whole Telegram? You can download the easyMonitor3 of the smi group. Than you can control an smi bus with up to 16 drives with your existing interface. If you can two usb-serial adapter on your existing interface and can debug the protocol. I tried today because i must replace an drive wich was out of order. At the moment i did not try to build the search routine of the drives serial numbers and set the drive IDs on the bus. I use the easyMonitor3 with my self build SMI-interface to set the drives. I tried to see how to set the Drive ID today. But i can't find my third usb-serial cable for debugging and it seems the one i found has much errors. I can create an smiwiki account for you if you want. So we can try to decode the rest of the telegrams.
:
Bearbeitet durch User
Thanks for the easyMonitor suggestion, tried it, but not everything seems to work for me. I can move up or down, the motors respond, but the monitor tool doesn't give any insight in the commands used (log file only shows 'time out'). And it doesn't seem to have any other functionality that I didn't figure out already. I do want to do exactly as you say: have one controller (I have a Warema SA16M230 actuator) send commands to the motors and listen/eavesdrop with the Selve-Serial gateway, just to reverse engineer the commands. However, that didn't work for me. While I can see the motors respond to the actuator (e.g. when it queries a position) I cannot see any of the commands the actuator is sending. I think the Selve serial gateway is a 'master' in the SMI bus and won't listen to other 'master's, there must be an easy electronic way to change that but I don't know how? The command I'm still struggling with is setting the motor ID. To do that I'd need to first get the serial/manufacturer ID from the motor, otherwise how could I set the motor ID of only on motor on the SMI but with 15 connected motors? The command 28 I found, e.g. for motor 9 the command is: ['0x79', '0x1c', '0x6b'] (incl checksum) Than the response is: ['0xef', '0x3c', '0x9', '0xcc'] (incl checksum) the first two bytes are always the same, irrespective of motor number and state/position. The 3rd byte is always the motor number. Not too useful, because you have to know the motor number already. 29 is also a command that gives a response, e.g. for motor number 9 the command is: ['0x79', '0x1d', '0x6a'] and the response is: ['0xef', '0x7d', '0x10', '0xce', '0xfe', '0x2e', '0x8a'] only the second to last byte is ever anything different, not sure what it is. If you add me to the wiki access I'll add my findings as we go.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.