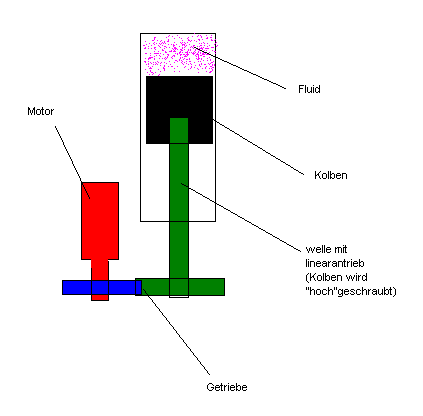
Hy zusammen, Wie der Titel schon sagt bin ich auf Motorsuche, aber noch sehr unsicher damit. Zumal ich mich auch noch nie mit dem Thema E-Motor befassen musste. Nun brauch ich das aber leider auf der Arbeit...und je mehr ich lese, desto verwirrter werde ich. Im Netz tummelt sich doch recht viel was nicht eindeutig ist, oder z.T. widersprüchlich ist. :/ Rahmenbedingunen: Drehmoment: min. 13 Nmm max. 17,2Nmm (wegen Maximaldruck, geht zur Not aber auch größer..nur muss eigentlich nicht sein wegen zusätzlicher Sicherheitsvorkehrungen die dann nötig werden. Das braucht so viel Platz^^) Drehzahl: min. 18 RPM max. 36 RPM Baugröße: so winzig wie nur geht Einschaltzeit: insgesamt ca. 10 min in 1 min Intervallen Steps: je mehr desto besser Steptoerance: <10% Encoder: ja, soll mit an den Motor dran Stromversorgung wird dann passend dazu ausgelegt, da es bisher ersteinmal um die reine Mechanik geht und die Auflösung&Positionierung geht. Das Prinzip (zu sehen im PNG im Anhang) ist folgendes: Ich habe einen Zylinder in welchem Flüssigkeit ist, diese soll "herausgepumpt" werden, und das möglichst langsam. Hierfür wird der Kolben über eine Art Linearantrieb "hoch-" oder "runtergeschraubt". Aus Messungen weiß ich die Kraft (ca. 10 N) die ich brauche um den Kolben zu bewegen. Zusammen mit dem Wirkungsgrad des Gewindes an der Welle / im Kolben (konservative 10%) und der Steigung (0,2mm) habe ich mir mein benötigtes Drehmoment berechnet inkl. Sicherheitsfaktor (s.O.) . Nun wäre die Idee hierfür einen Schrittmotor zu nehmen, da ich dann kein zusätzliches Getriebe am Motor anflanschen muss was bei einem normalen E-Motor wohl nötig wäre. Zudem will ich die genaue Position des Kolbens kennen und eine möglichst feine auflösung des Verfahrenswegs sowie möglichst wenig Toleranz haben. Das "Ding" soll einfach so exakt wie möglich laufen, bei minimalster Motorgröße. Bei diversen Firmen wurde ich nun auch fündig, aber ich bin mir immer noch nicht sicher ob das sinnvoll ist, was ich mir dabei gedacht hab. Oder lieg ich mit all dem hier nun total daneben? Und nur als Vorwarnung, ich bin leider dezent "elektrophob" veranlagt. Nicht böse sein falls ich mal auf dem Schlauch stehen sollte.^^ http://www.portescap.de/stepper-disc-magnet/product-108-P310.html (an der Toleranzgrenze) http://www.linengineering.com/LinE/contents/stepmotors/208.aspx (keine Toleranzangabe, ungünstige Bauweise) http://www.faulhaber.com/uploadpk/DE_AM2224_PCS.pdf (eigentlich schon zu stark, alles andere braucht ein Getriebe, an der Toleranzgrenze) http://www.kocomotion.de/produkte/schrittmotorenlinearaktuatoren.html (25P048S) (Kenn die Firma nicht...und was ich nicht kenn...:D finde auch keine Meinungen dazu im Netz ob die tauglich sind) Vielen Dank schonmal! =) ______________________________________________________________________ wer nun noch Schreibfehler findet, der darf sie still und heimlich behalten ;)
Angehängte Dateien:
-

prinzip.PNG
2,5 KB
Hi Irgendwie fehlt bei deinen Angaben der gewünschte Hub. >Encoder: ja, soll mit an den Motor dran Damit bleibt aber dein Getriebespiel außen vor. Persönlich würde ich einem Linear-Schrittmotorantrieb (dein letzter Link -> Hybrid-Motoren als Linearaktuatoren) den Vorzug geben. Wäre auch als Stichwort für weitere Suche geeignet. >Zudem will ich die genaue Position des Kolbens kennen >und eine möglichst feine auflösung des Verfahrenswegs sowie möglichst >wenig Toleranz haben. Ist eine Frage der Ansteuerung des Schrittmotors. Mit einem für Microsteps geeigneten Treiber kannst du einen 1,8°/Step-Motor auf ein paar tausend Schritte/U auflösen. Da ist eine Steigung des Gewindes von 0.2mm unnötig. MfG Spess
Hy, der Hub liegt bei 13mm. Und die fertigen Linearaktuatoren kann ich nicht nutzen, da die Welle nicht direkt am Motor dran sein kann. Klappt vom Platz her nicht, denn dann wird die Baugruppe zu hoch. :/ Die Anordnung geht nur so wie in dem Bild, also dass der Motor daneben sitz und über 2 Zahnräder mit der Welle verbunden ist. Getriebespiel habe ich ja eh keins, wenn es wirklich auch ohne Getriebe schon machbar ist. Wenn ich das richtig verstanden habe, dreht der Stepper ja genau so schnell wie die Eingangsfrequenz das vorgibt, im Gegenstz zu einem "normalen" E-Motor. Das mit der Toleranz bezieht sich auf die Genauigkeit pro vollem Schritt am Motor selbst.
Bei dem niedrigen Drehmoment (sicher, daß es stimmt, schon die Reibung der Spindel wird höher sein) und der Forderung nach einem Encoder tut es eigentlich ein Schrittmotor recht gut. Nur die Absolutposition kann das nicht melden, man kann aber gegen einen Anschlag fahren. Schau mal nach den Schrittmotoren aus 3 1/2 Zoll Floppylaufwerken, die den Kopf bewegen. Die Spindel ist dort sehr steil, aber der Motor klein. > Das "Ding" soll einfach so exakt wie möglich laufen, > bei minimalster Motorgröße. Preis also offenbar egal. Da lässt sich was machen. http://www.portescap.de/ Immerhin passende Getriebe, wenig Schritte http://www.linengineering.com/ Konventionelle Schrittmotore, eher gross http://www.faulhaber.com/ So in der Art, passende Getriebe, wenig Schritte http://www.kocomotion.de/ Konventionelle Schrittmotore, eher gross
Hi >Und die fertigen Linearaktuatoren kann ich nicht nutzen, da die Welle >nicht direkt am Motor dran sein kann. Klappt vom Platz her nicht, denn >dann wird die Baugruppe zu hoch. :/ Es gibt auch flache Motoren: http://de.nanotec.com/linearstellantrieb_lowcost.html >Die Anordnung geht nur so wie in dem Bild, also dass der Motor daneben >sitz und über 2 Zahnräder mit der Welle verbunden ist. Nein geht nicht so. Da fehlen, z.B. die Lager. MfG Spess
Die Baustelle wird größer. spess53 schrieb: > sitz und über 2 Zahnräder mit der Welle verbunden ist. > Nein geht nicht so. Da fehlen, z.B. die Lager. 1.Zahnradspiel könnte durch 2 verspannte Zahnräder (ähnlich Radio-Drehko) verringert werden. Aber mechanische Widerstände gibt es trotzdem. Wahrscheinlich muß Evox erst mal einen kleinen Versuchsaufbau starten. Egal ob der schön aussieht und wie groß er wird. 2.Die Ansteuerungselektronik wära da ja auch noch ...
Zum Drehmoment: Das hatte ich damit berechnet: Mmotor = ((Fm Ph 100 ) / (2 Pi η)) * s Fm: Kraft für Kolbenbewegung [N] (ca. 10N) Ph: Spindelsteigungen [mm] (0,2mm) η: Spindelwirkungsgrad [%] (10%) s: Sicherheitsfaktor (4) Gemessen habe ich das so, dass ich den Kolben einfach mit einem Federkraftmesser durch seinen Laufbuchse gezogen habe. Und dass er sich in Bewegung setzt waren die 10 N nötig. Sprich die Spindel muss dann mit der Kraft über das Gewinde auf den Kolben drücken. sollte eigentlich passen...außer ich hab irgendwo einen Bock mit den Einheiten geschossen, das das schau ich gleich mal noch. Zum Getriebe bzw den 2 Zahnrädern: Sowas kriegt man als Vorgespannte Ausführung doch eigentlich nahezu spielfrei hin. War ich zumindest bisher der Meinung :D (?)
Kraft ist nicht alles. Im Forum ist noch einige Interessante Hinweise Beitrag "Schrittmotor Lauf und Geschwindigkeit"
Also kommts in erster Linie auf eine saubere Ansteuerung an. Und einen Motor ohne Last habe ich ja nicht, hab ja Reibung an Kolben, Welle usw., so dass der Motor immer unter Last arbeiten muss. Sollte dem Rundlauf ja dann zu Gute kommen. Aber anders als in dem Thread, möchte ich den Hub meines Systems möglichst fein aufgelöst haben (also im Endeffekt einen möglichst kleinen Vollschrittwinkel) und nicht eine absolut konstante Drehgeschwindigkeit. Wenn bei mir die RPM ein wenig schwanken bricht mir das keinen Zacken aus der Krone...Solang es eben nicht ungewöhnlich viel ist und nicht ruckelt. ;) Und die Kraft habe ich hergenommen, damit ich wenigstens mal irgendeine Größe habe, die mir den Motor in gewisse Rahmenbedingungen steckt. Also Leistungsmäßig...weil ein Motor mit 2Nm wäre am Ende ja total überdimensioniert. Wenn man also bei der Motorwahl von Steppern anders vorgeht, als ich nun bisher, dann bitte ich um Aufklärung ;) Wie gesagt, Stepper sind absolutes Neuland für mich und anscheinden gar nicht mal so trivial. Und ich brauche nun auch einen Motor, damit ich weiter konstruieren kann. Aufhängung,Antriebsstrang etc. hängt alles leider von der Art und Größe des Motors ab. Deswegen trete ich grad leider auf der Stelle :/
> η: Spindelwirkungsgrad [%] (10%)
Ok, du hast also schon was Geschätzes eingerechnet.
Spielfrei muß es wohl nicht sein, denn du drückst vermutlich nur,
und geöffnet "aufgezogen" wird es in einem Rutsch bis zum Anschlag.
Es gibt ja automatische Pipettiereinrichtungen nach ähnlichem Prinzip.
okay, hab mich nun entschieden. Die max. 17,2 Nmm fallen weg. Ich mach dann eher die zusätzliche Sicherheitsvorkehrung rein und dann darfs auch mehr sein. Nur wie geh ich nun weiter vor? Bzw wie entscheide ich mich für einen bestimmten Motor? Geht das nun eigentlich auch ohne angeflanschtes Getriebe, wegen den niederen RPM?
Evox schrieb: > Geht das nun eigentlich auch ohne angeflanschtes Getriebe, wegen den > niederen RPM? Schrittmotore können von 0...10000Steps/min betrieben werden je nach Typ, Bauform und was der Hersteller in seinen Datenblättern da an Grenzen setzt. Man sollte mit den Antriebskräften nicht zu kritisch rechnen, denn dann kann es passieren das mal Schritte verloren gehen wenn die Parameter nicht mehr stimmen. Bisschen Drehmomentreserve kann da sicher nicht schaden. Außerdem wird eine Signalvorrichtung benötigt die einem mitteilt das die mechanischen Grenzen erreicht sind. Man könnte zwar die Steps auch zählen und dafür sorgen das man immer innerhalb einer Strecke bleibt, aber wenn doch mal Steps durch Störungen oder Ausfall der Versorgung verloren gehen, woher soll der Stepper dann seine aktuelle Position kennen? Dann muss der Stepper eben auch mal eine Referenzfahrt machen können. Ist also nicht viel anders als wie bei einem CD-Laufwerk oder einem Drucker.
Bei der Referenzfahrt wollte ich den Stepper dann auf einen Anschlag fahren lassen. Dann wird die Last zu hoch, er verliert Schritte und die Motorwelle steht.Das sollte ja der Encoder erkennen und kann dann Meldung geben.
Der Encoder meldet nur Stillstand. Erkennen kann das dann nur eine Elektronik, µC z.B. die dann darauf reagiert. Prinzipiell sollte das möglich sein auch wenn es keine saubere Lösung ist, weil dabei ja so einiges belastet wird und beschädigt werden kann.
ich dachte dem Motor macht das nichts aus wenn er "durchrutscht" ? Und ob's mir da dann alles zerreissen würde, wegen dem Max. Drehmoment muss ich dann mal nachrechnen...sobald ich dann ein Modell habe welches ich verwenden will. Nur irgendwie komm ich immer noch nicht auf den grünen Zweig, um zu sagen "der Motor ist genau der richtige, weil...." mit fehlt irgendwie immernoch das "weil..." :/
Evox schrieb: > ich dachte dem Motor macht das nichts aus wenn er "durchrutscht" ? Tut er ja dann nicht wenn die Motorleistung kraftschlüssig mit seinem Drehmoment die Spindelmutter bis an die Grenze belastet. Mach das mal 100..1000...10000 oder noch mehr mal, dann ist die Spindel, die Mutter, beides oder was anderes irgendwann hin. Obsoleszenz gleich mit eingebaut. Daher sollten die Teile die in ihrer Wirkung nach dem Motor konstruiert sind der Motorleistung gewachsen sein sonst wird der Motor zum Killer für diese Teile. Stell dir beim Auto ein 500PS Motor vor mit einem Getriebe aus einem 50PS-Auto. Das kann so nicht auf Dauer und bei Volllast funktionieren wenn die Leistung nicht runter geregelt wird. > Und ob's mir da dann alles zerreissen würde, wegen dem Max. Drehmoment > muss ich dann mal nachrechnen...sobald ich dann ein Modell habe welches > ich verwenden will. Nicht sofort, aber später schon. > Nur irgendwie komm ich immer noch nicht auf den grünen Zweig, um zu > sagen "der Motor ist genau der richtige, weil...." > mit fehlt irgendwie immernoch das "weil..." :/ Ich würde da erst mal festlegen mit welchen Kräften bei ungünstigstem Verschleiß man rechnen kann. Dann damit das nominale Drehmoment ermitteln und dann für die Dimensionierung des Motors das Drehmoment verdoppeln oder verdreifachen. Das maximale Drehmoment dient dann auch als Dimensionierungsgrundlage für Spindel, Mutter, Zahnräder, Lager usw. Einen Motor der das Drehmoment schafft besorgen und einen Feldtest ansetzen, so wie die Stiftung Warentest das früher immer machte indem sie die zu testenden Geräte lange laufen lies, in der Regel länger und bis an die Leistungsgrenze belastet, als es in der Praxis theoretisch geplant war. Und um das ganze auf die Spitze zu treiben dann noch in ein klimatische Umgebung testen, wie man das auf einen Zeitraum der geplanten Lebenserwartung abschätzen kann. Wenn das Gerät dann immer noch verlässlich läuft, haste alles richtig gemacht, ansonsten, wenn ein Teil versagt, ein besseres verwenden.
Hallo! Linearaktuatoren gibt es in ziemlich kompakten Bauformen. Wenn tatsächlich nur 10N benötigt werden müsste sich da schon was Kleines finden lassen. Ansonsten kann man natürlich einen x-beliebigen Nema17 Motor (oder kleiner, aber dann wird's eher wieder teurer) nehmen und damit eine Spindel antreiben. Mit freundlichen Grüßen Thorsten Ostermann
Okay...also wie gesagt, die 10N gelten für den Kolben, so dass er sich bewegt. Wurde ja im Versuch getestet, da sich die Dichtringe für die Axiale Dichtung nur schwer berechnen lassen. Ich weiß ehrlich gesagt auch garnicht genau wie ich das rechnen sollte. Da kommts ja auf alles an..Pressung der Dichtfläche, Oberflächenrauhigkeit, Durchmesser und und und. Im Versuchsaufbau messen war die bequemere Variante :D Drehmoment hab ich damit dann berechnet + Sicherheitsfaktor drauf. Das steht schon im ersten Posting und im 7. Nur ich weiß nicht, mir kommt irgendwie sehr wenig vor. Bei dem Ausgangsdrehmoment kann ich ja dann eigentlich einfach alles nehmen. Ó.ò Direkt nach dem Motor wird dann eine Rutschkupplung kommen, die bei einem definierten Drehmoment trennt, sollte genug Schutz für die Spindel etc. sein. Sprich wenn ich gegen den Anschlag fahr, könnte ich das auch an der Kupplung erkennen. Aber das ist auch nicht so optimal...naja...Gibt ja unendlich viele Möglichkeiten für die Positionserkennung. Daran wirds gewiss nicht scheitern. ;) Teuer ist auch kein Problem, klein ist viel wichtier. Und wie ist das eigentlich mit den Flachen Steppern die einen recht großen Durchmesser haben? Die leidige Frage: Lang und dünn oder kurz und dick? ;D Außer der Bauform unterscheidet sich da nichts, wenn ich das richtig verstanden hab?
Ich würde die Rutschkupplung weglassen und den Motorstrom so parametrieren, dass das gewünschte Maximalmoment nicht überschritten wird. Das ist nicht nur preiswerter, sondern spart auch Bauraum. Rutschkupplungen setzt man eigentlich nur ein, wenn Gefahr für Leib&Leben verhindert werden soll, oder wenn man der Parametrierung des Antriebs nicht traut und im Fehlerfall großer Schaden entstehen könnte. Das sehe ich hier aber nicht. Die Wahrscheinlichkeit, dass der Schrittmotor mit zu hohem Drehmoment "durchgeht", geht gegen Null. Die Bauform ist interessant, wenn es hoch dynamisch werden soll. Dann nimmt man lange, schlanke Motoren, weil die im Vergleich ein niedrigeres Massenträgheitsmoment haben. Bei hohen Lasten wirkt sich andersherum ein höheres Trägheitsmoment am Motor positiv auf die Stabilität des Systems aus. Bei Servoantrieben ist die Faustformel J(Last)/J(Motor)=1..10. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Rutschkupplungen setzt man eigentlich nur ein, wenn Gefahr für > Leib&Leben verhindert werden soll, Jede Bandmaschine (Video-, Kassettenrekorder) gefährdet Leib und Leben? Da waren früher sogar meist gleich mehrere Rutschkupplungen eingebaut gewesen. Mächtig gefährlich.
Lies mal genau, was ich geschrieben habe. Bei deinem Beispiel wollte man offensichtlich einen Schaden am Band verhindern. Die Fehlerwahrscheinlichkeit lag sicherlich auch deutlich höher. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Bei deinem Beispiel wollte man > offensichtlich einen Schaden am Band verhindern. Ne, man wollte das Band immer straff halten, damit es keinen Bandsalat gab, aber die heutige Generation kennt das alles ja nicht mehr weil man das den heutigen Systeme abgewöhnt hat.
Hallo Michael! Das zeigt doch, dass dein Beispiel hier nicht passt. Du vergleichst Äpfel mit Birnen. Wir reden hier von einem Positionierantrieb, nicht von einer Kraftregelung. Und ja, ich kenne auch nicht Videorekorder und Audiokassetten. Aber ich bin erhlich gesagt froh, das wir die Zeit des Bandsalats hinter uns gelassen haben. Mit freundlichen Grüßen Thorsten Ostermann
Evox schrieb: > Wie der Titel schon sagt bin ich auf Motorsuche, aber noch sehr unsicher > damit. Zumal ich mich auch noch nie mit dem Thema E-Motor befassen > musste. Hm, oder vielleicht ganz anders... mit einem Hubmagnet? Falls du Position oder Fluidfluss sowieso extern irgendwo abnimmst, hast du einen Regelkreis. Der Regler selber ist zwar nicht gerade trivial, aber du klingst nicht danach, als würde dich sowas abschrecken. Ansonsten: es gibt auch Schrittmotoren, die eine Spindel als Welle haben. Oder auch Motoren, die eine Spindelaufnahme als Rotor haben, dass praktisch die (nichtrotierende) Welle orthogonal zur Drehrichtung verfahren wird. http://img.directindustry.de/images_di/photo-mg/elektroaktuator-mit-schrittmotor-27494-2384153.jpg http://img.directindustry.de/images_di/photo-mg/elektroaktuator-mit-schrittmotor-27494-2384241.jpg Sowas gibts zwar dann vermutlich nicht in einer Größenordnung, die die vorschwebt, aber vielleicht wäre das wegen dem wegfallenden Getriebe eine Alternative. Ansonsten könnte sicher http://www.micromo.com/stepper-motors-datasheets.aspx oder http://en.nanotec.com/steppermotor_st2018.html was für dich sein.
{kind=link}
{kind=link}
Linearaktuatoren gibt es schon sehr klein. Unterhalb von 42mm Flanschmass wird das allerdings tendenziell wieder teurer. Dafür spart man aber die ganze Mechanik ein. Hier mal ein Bild eines sehr kleinen Aktuators, den ich mal zum Spielen bei Pollin gekauft habe: http://www.schrittmotor-blog.de/?p=146 Mit freundlichen Grüßen Thorsten Ostermann
Wie schon gesagt, der Preis ist mir egal. ;) Das mit dem Hubmagnet geht leider nicht, da ich sonst auch noch das Magnetfeld abschirmen muss, damit nichts "rauskommen" kann. Sind einfach zu empfindliche, andere Versuchsaufbauten drum herum. Zudem hab ich auf die schnelle nichts gefunden was bei der benötigten Anfangskraft ähnliche Abmaße liefert. Scheint alles deutlich größer zu sein als der Motor mit Spindel. Also hab mal noch geschaut was ich rausholen kann an "Bauplatz". Sieht nicht nach sehr viel aus. :/ Nema 8 ist das Maximum was ich unterbringen kann, größere Rahmengröße geht leider nicht. Die Spindel direkt als Welle im/am Motor haut auch nicht hin, da ich dafür nicht genug Platz habe. Sprich der Motor sitzt neben der Spindel und 2 Zahnräder drauf. Und dass ich da dann Lager brauch ist mir klar, die sind auch schon drin. bleiben mir also noch die hier, wenn ich das richtig sehe: http://www.orientalmotor.de/Products/Stepper_motors/Stepper_motors/high_torque_2phase_motors_pkp/?filter1=Standard&filter2=20+mm (CRK serie mit dem 20mm PKP Motor) Encoder: ja Getriebe: ja http://www.linengineering.com/LinE/contents/stepmotors/208.aspx Encoder: ja Getriebe: nein, so wie's aussieht (?) http://www.kocomotion.de/de/produkte/schrittmotorenlinearaktuatoren.html (8H2) finde keine Angaben zu Encoder / Getriebe http://de.nanotec.com/schrittmotor_st2018.html Encoder: ja Getriebe: ja Mit der anderen Bauform hab ich nichts richtig passendes gefunden... wär vll eigentlich auch recht interessant gewesen. Aber ich glaub dann werd ich wohl mal Würfeln zwischen Nanotec und Oriental :D
hmm..blöd...aber 60mm Gesamtbauteillänge aufwärts. also für Motor+Encoder+Getriebe muss dann demnach einfach ohne Getriebe auskommen, dann gehen 20mm weg. Dann wärs passabel.
Evox schrieb: > Aber ich glaub dann werd ich wohl mal Würfeln zwischen Nanotec und > Oriental :D Alles klar. Ich würd dir nanotec empfehlen, weil die Faulhaber liefern und Faulhaber der <hier Automarke ihres Vertrauens einfügen> unter den Automarken ist.
ach...Nanotec verwedet Faulhaber Teile...interessant =) Faulhaber wär eigentlich mein Favorit gewesen, aber die haben leider nichts was so richtig bei mir reinpasst.
So ein Unsinn. Nanotec hat eine eigene Fertigung. Manche behaupten sogar, dass Nanotec in chinesischer Hand ist. Keine Ahnung, ob das was drann ist. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > So ein Unsinn. Stimmt! Ich hab in meinem Beitrag "Re: Motor (Schrittmotor?) finden" unten zwei Links aus meinen Unterlagen gekramt, weil ich auch mal so einen Winzling gesucht hab. http://www.micromo.com hat Faulhaber im Programm, natürlich nicht (der Hersteller) Nanotec. Mein Fehler, Entschuldigung! Nicht mein Tag heute...
ah okay...schade...kam mir schon komisch vor weil die ganz andere Größen im Programm haben und alles in NEMA Größen. Das hat Faulhaber ja nicht. Aber..die werden schon auch funktionieren, selbst wenns Chinaware sein sollte.^^ Und wenn nicht, dann sieht man das ja beim testen. Noch eine Frage ist mir eingefallen: Wie ist das eigentlich mit der "Step tolerance". Akkumuliert die oder ist die absolut nur auf den Anhaltevorgang gesehen? Sprich, step toleranz von 5% bei 100 Steps mit je 3,6°. Hab ich dann im worst case: 100*0,18° = +- 18° über den gesamten Drehungsvorgang. oder einfach +- 0,18° allgemein, als Genauigkeit für den Anhaltevorgang?
Hat echt keiner eine Ahnung was da nun zutrifft? O.o kann ich ja fast nich glauben ;)
Evox schrieb: > Noch eine Frage ist mir eingefallen: > Wie ist das eigentlich mit der "Step tolerance". Akkumuliert die oder > ist die absolut nur auf den Anhaltevorgang gesehen? > > Sprich, step toleranz von 5% bei 100 Steps mit je 3,6°. > Hab ich dann im worst case: > 100*0,18° = +- 18° über den gesamten Drehungsvorgang. > oder einfach +- 0,18° allgemein, als Genauigkeit für den Anhaltevorgang? Letzteres. Ich weiss nicht, ob Du schon einmal einen üblichen Schrittmotor zerlegt hast. Dort sieht man sehr schön den Rotor, der zahnradförmig aufgebaut ist und der dann an den Statorblechen entsprechend der Richtung des angelegten Stromes (und damit Magnetfeldes) "einrastet". Dadurch, dass die Zahnanzahl festliegt, kann da nichts aufsummieren (eine angenehme Eigenschaft von Schrittmotoren): nach soundsoviel Schritten hast Du also immer eine volle Umdrehung (vorausgesetzt natürlich, dass Du keine Schrittverluste hast ;-) mit der Toleranz bei der Rotor-/Statorherstellung, die in der "Step tolerance" zusammengefasst wird. Chris D. P.S.: Ich sehe gerade, dass in der Wikipedia entsprechende Bilder zu finden sind: http://de.wikipedia.org/wiki/Schrittmotor
Ah, wunderbar! Vielen Dank! Und auch vielen Dank an alle anderen die mir hier so fleißig geholfen haben! Ich denke, damit komm ich dann nun weiter bei der Auswahl, so riesig viele Modelle sind es inzwischen ja nichtmehr.. =)
Wobei noch der lastabhängige Winkelfehler obendrauf kommt. Der Fehler reduziert sich übrigens auch nicht durch Mikroschritt (MS erhöht nur die Auflösung, nicht die Genauigkeit) und beträgt bis zu +/- 2 Vollschritte. Bei 2 Vollschritten ist man dann an dem Punkt angekommen, wo der Motor überspringt und Schritte verliert. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Bei 2 Vollschritten ist man dann an dem Punkt angekommen, wo der Motor > überspringt und Schritte verliert. Wobei das der vorgesehene Encoder mitbekommt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.