Hallo Freunde, 1. gibt es irgend einen Grund, warum ich den Quellcode eines funktionsfähigen Timers ( von Karl Heinz Buchegger korrigiert und für gut befunden) und die UART Routine von myAVR, welche auch voll funktionsfähig ist nicht kombinierbar sind? Mit dem Timer erzeuge ich mir einen Takt für meinen Schrittmotor, mit dem UART möchte ich die Position überwachen, welche ich durch eine ADC und einen POTI erfasse. ADC Quellcode ist mehr oder weniger aus dem Tutorial (mehrfach ADC) und funktioniert in diversen Quellcodes auch einwandfrei. nur kombiniert funktioniert die Ausgabe, aber nicht der TIMER.... Ich habe nun alles kontrolliert, vielleicht habt ihr da noch eine Idee... 2. gibt es eine Alternative zu dem Delay: _delay_ms(200) ? Der Delay unterbricht ja meinen Timer für 200ms und im späteren Gebrauch wäre es sinnvoll, wenn der Timer trotzdem normal weiterliefe. Gruß Sven
wie überprüft ihr z.b. adc werte? via UART? oder gibt es noch bessere möglichkeiten sich die werte anzuzeigen?
@ Sven Weinmann (sickone4) > * Problem.txt (3,7 KB, 16 Downloads) Warum postest du nicht einfach deinen C-Quelltext als .c Datei? Hat u.a. den Vorteil, dass die mit Syntax highlighting angezeigt wird. >1. gibt es irgend einen Grund, warum ich den Quellcode eines >funktionsfähigen Timers ( von Karl Heinz Buchegger korrigiert und für >gut befunden) und die UART Routine von myAVR, welche auch voll >funktionsfähig ist nicht kombinierbar sind? Eigentlich nicht. >Mit dem Timer erzeuge ich mir einen Takt für meinen Schrittmotor, mit >dem UART möchte ich die Position überwachen, ??? Wie soll ein UART eine Position überwachen? > welche ich durch eine ADC und einen POTI erfasse. Dazu braucht man ber keinen UART. >ADC Quellcode ist mehr oder weniger aus dem Tutorial (mehrfach ADC) und >funktioniert in diversen Quellcodes auch einwandfrei. >nur kombiniert funktioniert die Ausgabe, aber nicht der TIMER.... Naja, einfach planlos was zusammenkopieren führt selten zum Ziel.
1 | while(1) // Endlosschleife |
2 | {
|
3 | |
4 | if (bit_is_clear(PINC,4)) |
5 | {
|
6 | cli(); |
7 | Schritte = 100; // Motor Schritte = Schritte/2 |
8 | _delay_ms( 200 ); |
9 | sei(); |
10 | }
|
11 | |
12 | print("Hallo myAVR! \n "); |
13 | |
14 | } // Ende while(1) |
15 | } // Ende main |
AUA! _delay_ms von 200ms UND dabei gesperrte Interrupt? Das kann nicht gut gehen. Siehe Interrupt. >2. gibt es eine Alternative zu dem Delay: _delay_ms(200) ? Sicher. Dein Timer. Siehe Multitasking. >Der Delay >unterbricht ja meinen Timer für 200ms und im späteren Gebrauch wäre es >sinnvoll, wenn der Timer trotzdem normal weiterliefe. Eben.
@Sven Weinmann (sickone4) >wie überprüft ihr z.b. adc werte? via UART? Du meinst das Debugging? Ja, UART ist eine recht gute Möglichkeit. > oder gibt es noch bessere > möglichkeiten sich die werte anzuzeigen? LCD, Ablegen im SRAM und per Debugger anschauen.
Sven Weinmann schrieb: > Der Delay > unterbricht ja meinen Timer für 200ms Nö, tut er nicht. Die Delay Routine wird vom Timerinterrupt ebenso unterbrochen wie andere Programmteile auch. Nur das laufende (Haupt-)Programm wird für die 200 mS lahmgelegt. Du musst natürlich (sei) und (cli) vermeiden, ist hier aber eh unnötig. Mach doch den Anhang bitte nicht als txt sondern als *.c, dann öffnet sich bei mir der richtige Editor.
hallo Leute, ich dachte, dass das was ich meinte irgendwie klar wäre :) sorry -.- ich möchte hier im beispiel mit einem taster meinen schrittmotor X-Schritte fahren lassen. (funktioniert) gleichzeitig habe ich mit einem getriebe einen poti mitgeschaltet, welcher mit einer ADC erfasst wird mit 10bit Auflösung 0-1023 Schritte ausgibt (funktioniert) So kann ich die Position des Schlittens, welcher vom Schrittmotor angetrieben wird überwachen. Um zu testen, wie groß meine Schrittweite ist möchte ich die ADC ausgegeben bekommen, damit ich weiß, wie weit sie die ADC verändert wenn ich zum beispiel 100 schritte fahre. in kombination beider sachen funktioniert aber der timer nicht. im beispielscript habe ich eine funktionsfähige UART Sendefunktion benutzt um euch zu zeigen, dass es kein fehler ist den ich gemacht habe. was das delay angeht, so unterbricht das auch den timer! wenn ich das delay weglasse, so wird der port nicht mit x- schritten getaktet sondern unendlich und hört nicht mehr auf. warum das so ist verstehe ich auch nicht. EDIT Im Beispiel der UART wird natürlich nicht die ADC ausgegeben sonder der Text Hallo myAVR diesen durch den ADC wert zu ersetzen ist kein problem und funktioniert auch, dennoch ist das kernproblem ja die kombination aus UART und TIMER Platform: Atmel Studio 6.0 Atmega 8
Sven Weinmann schrieb: > getaktet sondern unendlich und hört nicht mehr auf. warum das so ist > verstehe ich auch nicht. das ist das eigentliche Problem. Ich glaube ich hatte dir das schon mal gesagt: Ohne funktionsfähige Tasten-Drück / Entprellroutine kommst du mit deinem Taster nicht mehr weiter. Logisch Taktet dein Schrittmotor ständig weiter. Denn dein PINC/PC4 ist ja dauernd gedrückt. Und solange der gedrckt ist, wird die Anzahl der Schritte dauernd immer wieder auf 100 gesetzt. So schnell kann der Timer die gar nicht runterzählen, wie in der Hauptschleife bei gedrücktem Taster immer wieder alles auf 100 zurückgesetzt wird. Falk hat schon ein wahres Wort gesprochen: Du kopierst Dinge zusammen ohne sie zu verstehen oder auch nur den Versuch zu machen sie zu verstehen. In der Programmierung geht das dann eben schief. Den Delay hab ich in der Vorlage die ich dir gegeben habe, nur deswegen eingefügt, damit da ein wenig Zeit vergeht und der der µC Däumchen dreht und mittels Timer seine 100 Schritte machen kann, ohne dass ich dafür eine großartig komplizierte Steuerung brauche. Denn das Hauptaugenmerk lag auf der Fragestellung "Wie erzeugt man 100 Steps" und nicht "Wie programmiere ich Svens Programm"
bitte versteh mich nicht falsch, ich drücke den taster 1x und hab nicht den finger drauf! es ist ein taster, kein rast-schalter. d.h. es kann ja zu "flattern" kommen das toleriere ich ja, das sagte ich dir auch, da es nur zum testen ist. aber trotzdem muss nach meinem verständnis diese 100 irgendwann mal ablaufen. wenn ich 1x drücke kann ja von miraus im schaltmoment oder wenn der taster sich löst noch x milli sekunden der wert immer wieder 100 sein, aber spätestens nach der letzten möglichen flanke sollten die 100 doch ablaufen. wenn aber nach 5 min immernoch keine änderung aufgetreten ist, dann ist das kein flattern mehr
@ Sven Weinmann (sickone4) >ich dachte, dass das was ich meinte irgendwie klar wäre :) sorry -.- Das "denken" alle, die noch nicht über das Thema Netiquette gelesen haben. >ich möchte hier im beispiel mit einem taster meinen schrittmotor >X-Schritte fahren lassen. (funktioniert) Mit welchem Programm? >So kann ich die Position des Schlittens, welcher vom Schrittmotor >angetrieben wird überwachen. Ja. Wenn gleich die Auflösung und Genauigkeit auf einem anderen Blatt steht. >in kombination beider sachen funktioniert aber der timer nicht. Kaum. Poste dein Originalquelltext als Anhang. >im beispielscript habe ich eine funktionsfähige UART Sendefunktion Was sollen wir mit dem Beispiel? >benutzt um euch zu zeigen, dass es kein fehler ist den ich gemacht habe. ;-) 99% aller Programmfehler sind vom Programmierer. Erst recht bei Anfängern, da sind es gefühlt 110%. >was das delay angeht, so unterbricht das auch den timer! Eben, und genau DAS ist Unsinn. Da kann man sich den Timer sparen. >wenn ich das delay weglasse, so wird der port nicht mit x- schritten >getaktet sondern unendlich und hört nicht mehr auf. warum das so ist >verstehe ich auch nicht. Ich schon. Du brauchst eine Ablaufsteuerung per statemachine. >und funktioniert auch, dennoch ist das kernproblem ja die kombination >aus UART und TIMER Das ist kein Problem.
Sven Weinmann schrieb: > wenn aber nach 5 min immernoch keine änderung aufgetreten ist, dann ist > das kein flattern mehr Dann mach dir halt da
1 | if (bit_is_clear(PINC,4)) |
2 | {
|
mal eine Ausgabe rein um nachzusehen, ob du den Pin auch nach Loslassen des Tasters immer noch als 0 einliest oder nicht. WEnn die Schritte nicht zurückgesetzt werden, dann müssen die irgendwann mal auf 0 herunten sein. In deinem Testprogramm gibt es nach loslassen des Tasters keinen Grund, warum da laufend weiterhin SChritte erzeugt werden sollten. Selbst dann, wenn man den delay rausnimmt (was ja auch so sein sollte).
Und das nächste mal bitte eine ordentliche Fehlerbeschreibung. 'Funktioniert nicht' ist keine Fehlerbeschreibung. "Ich drcke den Taster und nach dem Loslassen taktet der die ganze Zeit weiter" wäre eine Fehlerbeschreibung mit der man was anfangen kann. Und zeig dein richtiges Programm. Es ist schön, wenn du im Text beschreibst, dass du mit dem ADC arbeiten willst. Wenn aber im ganzen Programm kein ADC vorkommt, dann interessiert das hier auch weiter keinen.
funktioniert = aufspielen des UART ohne den Timer -> Ausgabe Fehlerfrei funktioniert = aufspielen des TIMERS ohne die UART -> TIMER taktet Fehlerfrei funktioniert nicht = aufspielen des kombinierten Quellcodes -> Timer taktet nicht UART funktioniert noch immer Fehlerfrei! TEST: auskommentieren der Zeile ->
1 | print("Hallo myAVR! \n "); |
RESULTAT: TIMER taktet wieder Fehlerfrei deshalb die aussage beides zusammen funktioniert nicht. Keine weiteren Fehler aufgetreten.
die von mir genutzte nicht beispielhaft genutze UART ROUTINE sieht übrigends wie folgt aus:
1 | uint16_t position_Y; // Variable für Y-Position ADC |
2 | char puffer[10]; // Deklaration des Sendepuffers |
3 | |
4 | |
5 | void sende (char buffer[]) // Funktionsaufruf |
6 | { // zum Übermitteln einer Zeichenfolge |
7 | for (int i=0; buffer[i]!=0; i++) // For-Schleife: Abbruch wenn Zeichenfolge |
8 | { // zu Ende ist, sonst "i" inkrementieren |
9 | while (bit_is_clear(UCSRA,5)) // Solange Zeichen noch nicht vollständig... |
10 | { ; } // ...übermittelt wurde, tue nichts! (warte) |
11 | UDR=buffer[i]; // Danach: Sende aktuelles ("i"-tes) Zeichen |
12 | }
|
13 | }
|
14 | |
15 | |
16 | int main { |
17 | UBRRL = 23; // Quarz: 3.6864MHz, Baudrate 9600 |
18 | UCSRB = 0b10011000; // Empfänger, Sender ein UCR = UCSRB |
19 | |
20 | ....
|
21 | |
22 | sprintf (puffer, "Position: %d \n", position_Y); |
23 | sende (puffer); |
24 | |
25 | ... } |
das nun nur die UART, welche ich benutze. Im Beispielcode hab ich eine genutzt (zusammenkopiert, welche auch 100% funktioniert. Die die ich nutze haben wir in der Schule programmiert und funktioniert auch)
1 | char puffer[10]; // Deklaration des Sendepuffers |
2 | |
3 | ...
|
4 | |
5 | sprintf (puffer, "Position: %d \n", position_Y); |
zähl mal nach, wieviele Buchstaben du in puffer schreibst :-) Reicht da eine Arraygröße von 10? Und da die Variable 'steps' dahinter im Speicher liegt, bügelst du dir hier den Speicher nieder und überschreibst dir steps laufend mit Werten ungleich 0. Und genau deshalb ist es wichtig, dass du GENAU das Programm postest, welches du auch testest. Nicht irgendwas fürs Forum zurecht gemachtes, sondern exakt das Programm!
Danke für den Hinweis, aber was meinst du mit:
> Und da die Variable 'steps' dahinter im Speicher liegt,
?
Wieso liegt die dahinter? Was hat denn mein steps mit dem char zutun?
@ Sven Weinmann (sickone4) >> Und da die Variable 'steps' dahinter im Speicher liegt, >Wieso liegt die dahinter? Weil der Cpompiler die Variablen einfach nacheinander in den Speicher platziert. >Was hat denn mein steps mit dem char zutun? Sie sind Nachbarn, im Speicher. Und wenn du in deinen 10 Byte String mehr als 10 Zeichen reinschreibst, werden die nachfolgenden Speicherzellen, die nicht mehr zum String gehören, überschrieben. Klassischer Pufferüberlauf. Es gibt keinen Programmierer, dem sowas noch nie passiert ist. ;-)
Sven Weinmann schrieb: > Danke für den Hinweis, aber was meinst du mit: >> Und da die Variable 'steps' dahinter im Speicher liegt, > ? > > Wieso liegt die dahinter? Was hat denn mein steps mit dem char zutun?
1 | uint16_t position_Y; // Variable für Y-Position |
2 | char puffer[10]; // Deklaration des Sendepuffers |
3 | volatile uint16_t steps; |
irgendwie muss ja der Compiler die Variablen im speicher anordnen. Und der macht das nicht wahllos, sondern in der Reihenfolge in der du die Variablen anführst. Und er lässt auch keinen Platz dazwischen, sondern legt die Variablen nacheinander in dern Speicher. Hat position_Y die Speicheradresse 100 und ist 2 Bytes groß, dann beginnt die Variable puffer an der Adresse 102. Und da das Array 10 Bytes groß ist, kommt daher die Variable steps an der Speicheradresse 112 zu liegen. Schreibst du daher in puffer etwas rein, was mehr als 10 Bytes beansprucht, dann überschreibst du damit auch das Byte an der Speicheradresse 112. Dort liegt aber die Variable 'steps'. Ergo: mit dem sprintf hast du zwar in puffer einen String reingeschrieben, du hast aber auch steps verändert. Unabsichtlich zwar, aber du hast es verändert.
Ok das macht Sinn und das kenne ich auch von der SPS, wobei das dort z.b. im Datenbaustein sofort sichtbar ist! Da stehen die Adressen auch direkt daneben! Was mir nun durch den Kopf geht ist folgendes: erste Möglichkeit -> Char als letztes deklarieren, sodass platz für einen Überlauf wäre. zweite Möglichkeit -> Wissen, wie groß der Char genau sein muss! Maximal kann der 256 Byte groß sein. Aber ihn so zu deklarieren ist auch quatsch. Ist es beim µC auch so, dass er nicht 254 sondern 254 Byte Groß ist und die ersten zwei Byte für die Größe zuständig sind?
Sven Weinmann schrieb: > Ok das macht Sinn und das kenne ich auch von der SPS, wobei das dort > z.b. im Datenbaustein sofort sichtbar ist! C ist nun mal nichts für Programmierer, mit denen die Tante Lulu .... > erste Möglichkeit -> Char als letztes deklarieren, sodass platz für > einen Überlauf wäre. Nein. > zweite Möglichkeit -> Wissen, wie groß der Char genau sein muss! Maximal > kann der 256 Byte groß sein. Aber ihn so zu deklarieren ist auch > quatsch. Schätzen! gezielt schätzen! Für die Ausgabe von Position: mit einer Zahl dazu und einem Newline brauchst du keine 256 Zeichen, mit 30 oder 40 bist du auf der sicheren Seite, selbst dann wenn du den Text später mal auf "Position Schlitten %d\n" erweiterst. * Möglichkeit 3 Den AUfteilen in zb die konstanten Teile und die Zahl. Und da ein int nur bis 65535 gehen kann, weißt du, dass du dafür nicht mehr als 5+1 Zeichen brauchen wirst. > Ist es beim µC auch so, dass er nicht 254 sondern 254 Byte Groß ist und > die ersten zwei Byte für die Größe zuständig sind? Nein. Sagte ich eigentlich schon mal, dass du ohne C-Buch nicht weit kommen wirst? Strings sind die erste große Hürde in C. Da warten noch viele weitere.
ich hab das nun geändert auf 40, aber ich es hat sich nichts geändert. der timer läuft nach wievor nicht beim aufspielen. ABER! wenn ich nun das controlcenter starte UND verbinde, so startet der timer und auch das restliche programm funktioniert. woran kann denn sowas nun liegen?
Sven Weinmann schrieb: > ich hab das nun geändert auf 40, aber ich es hat sich nichts geändert. > der timer läuft nach wievor nicht beim aufspielen. ABER! Dann muss man eben weiter suchen. Das war ja auch nur der erste Fehler. Sagt ja keiner, dass es nicht noch mehr gibt. > wenn ich nun das controlcenter Wer oder was ist das Controlcenter?
Das Control Center ist ein kleines Programm von myAVR -> http://shop.myavr.de/index.php?ws=download_file.ws.php&dlid=263&filename=software/tool_ControlCenter_V200-b866_de.zip einfach entpacken und starten. Ich hab keine Ahnung, welche Programme ihr benutzt für die Kommunikation zw µC und dem PC. Ich nutze Win7 64bit und das Programm läuft da drauf!
Sven Weinmann schrieb: > einfach entpacken und starten. Ich hab keine Ahnung, welche Programme > ihr benutzt für die Kommunikation zw µC und dem PC. Ich starte dazu ein ganz gewöhliches Terminalprogramm. Entweder Hyperterminal oder hTerm
Hyyperterminal kann Win7 leider nichtmehr und mit hTerm wurde ich nicht richtig warm... mal hat es Verbinden mal nicht. ControlCenter kannste ja mal ausprobieren. Für reine Textausgaben ist das eigentlich wunderbar. Da würde es meiner meinung nach mehr dem Hyperterminal gleichen.
ich habe gerade festgestellt, dass das programm, welches ich in den µC aufgespielt habe dann läuft, sobald ich im datenmodus bin. bei hTerm benötige ich zumindest noch eine Zusatzsoftware, um in den Datenmodus umzuschalten, dabei ist mir das aufgefallen
kleine korrektur! falls es nicht aufgefallen ist. die zeite ADC_Init(); fehlt im main cycle! hab ich korrigiert
>...sobald ich im datenmodus bin.
[Scherz]
Was machst Du denn im Datenmodus? Tut das weh?
[\Scherz]
Was ist ein Datenmodus? Und wer befindet sich darin oder nicht?
Langsam fange ich an zu Zweifeln.... Ich benutze einen USB-Programmer der verschiedene Modi zur Verfügung stellt. Um z.b. UART zu nutzen muss man eben diesen Programmer in den Datenmodus umschalten. Das geht entweder vom Programm selbst oder man schaltet diesen manuell um. Das Programm ControlCenter welches ich oben verlinkt hab macht das automatisch, hTerm macht das nicht automatisch.
Sven Weinmann schrieb: > Langsam fange ich an zu Zweifeln.... > Ich benutze einen USB-Programmer der verschiedene Modi zur Verfügung > stellt. Tja. Den benutzt aber ausser dir keiner hier. Daher sagt uns das alles nichts, was du da erzählst. Wir brennen unsere Programme in den µC, der Brenner resettet den µC und danach lässt der Brenner die µC-Hardware wieder in Ruhe. Und dann läuft der auch ohne, dass man irgendwelche Modi ein-\aus-\umstellen muss. Und wenn der µC etwas auf der USART ausgibt, dann gibt der das einfach aus. Dem ist das nämlich völlig wurscht, ob da wer zuhört oder nicht.
ok und wie verbindet ihr den Käfer dann mit dem PC? Keinen Programmer dazwischen?
Sven Weinmann schrieb: > ok und wie verbindet ihr den Käfer dann mit dem PC? Keinen Programmer > dazwischen? Selbstverständlich ist da auch ein Brenner. Aber der hat keine Daten oder was weiß ich für welche Modi. Brenner brennt das Programm rein - Brenner zieht sich elektrisch wieder vom der µC-Schaltung zurück - µC läuft.
langsam.... ich hab einen USB Programmer, welcher einen USB Anschluss hat, durch welchen ich mein Programm vom PC via Programmer auf den Chip Brennen kann. Auf gleichem Weg wird auch kommuniziert. Es würde mich sehr stark wundern, wenn dein Chip mit deinem Terminal übers Telefon kommuniziert. Wie der Programmer nun auch immer aussieht das ist meiner -> http://shop.myavr.de/Programmer%20und%20Bridges/mySmartUSB%20MK2%20%28Programmer%20und%20Bridge%29.htm?sp=article.sp.php&artID=42 vielleicht kann man sich dann damit mehr vorstellen. diese Platine sitzt auf einer weiteren -> http://shop.myavr.de/Systemboards/myAVR%20Board%20MK2,%20best%C3%BCckt.htm?sp=article.sp.php&artID=40 und eben dieses Board "musste" man sich als ich die Schule begann kaufen. Eine alternative, welche ich noch habe zu dem Systemboard ist ein Kabel, mit welchem ich von dem Programmer via Wannenstecker und Flachkabel direkt auf ein Breadboard an einen µC gehen kann. Dies ersetzt jedoch nur die Platine.
Also ich habe den Eindruck das Du eine ganze Menge an Wissen erst noch erwerben musst. Das ist an sich kein Beinbruch. Wir haben alle mal angefangen Widerstände auf richtige Polung zu prüfen. :-) Aber Du bist hier mittendrin an einem Detailproblem, wo Dich ein ganzer Haufen Grundfragen umzingelt hat die nun gnadenlos zuschlagen. Und nicht nur Du selbst kommst nicht weiter: Du kannst es auch nicht so erklären, das Leute die 30 Jahre in dem Geschäft sind, einen Ansatzpunkt finden. Jedesmal kommt irgendwas Neues dazu. Und Du bist nicht Cäsar, der gleichzeitig Vercingetorix belagern und den Belagerungsring noch nach aussen verteidigen kann. (Es war ja auch verdammt knapp, damals). Ich schlage Dir vor, mal ganz zurück zu rudern und mit dem einfachsten anzufangen. 1. Nenne uns alle beteiligten Komponenten, Platinen, Prozessoren, Software etc. so genau wie möglich. Notfalls poste Links auf das Produkt. 2. Mache ein Foto von Deinem Aufbau. Ob das dieses Jahr noch was wird, wage ich zu bezweifeln. Dir fehlen einfach viel zu viele Grundlagen. Aber dennoch können wir es ja probieren.
@ Sven Weinmann (sickone4) >ich hab das nun geändert auf 40, aber ich es hat sich nichts geändert. Logisch. >der timer läuft nach wievor nicht beim aufspielen. ABER! Ein Band spielt beim Oktoberfest auf. Mit Mikrocontrollern hat das nix zu tun. Die werden programmiert oder gebrannt. >woran kann denn sowas nun liegen? Willkommen bei der Fehlersuche. Dein Programm hat wie bereits gesagt noch diverse grundlegende Fehler. 1.) Du musst deine Taster entprellen, das macht man einfach mit deinem 1ms Timer und Entprellung per Software. 2.) Du musst den Flankenwechsel von "Taste nicht gedrückt" zu "Taste gedrückt" erkennen und nur DANN deinen Schrittzähler auf 100 setzen. Versuchs mal mit dem Programm im Anhang.
Sven Weinmann schrieb: > langsam.... > > ich hab einen USB Programmer, welcher einen USB Anschluss hat, durch > welchen ich mein Programm vom PC via Programmer auf den Chip Brennen > kann. Auf gleichem Weg wird auch kommuniziert. Es würde mich sehr stark > wundern, wenn dein Chip mit deinem Terminal übers Telefon kommuniziert. Ich 'kommuniziere' überhaupt nicht über den Brenner. Mein Brenner brennt Programme in den µC. Drumm heißt er Brenner. Und ansonsten hält er sich aus allem raus, was mit dem µC zu tun hat. Und das ist auch gut so.
OK dann tu ich das mal. Und leider hast du auch ein Stückweit recht. Ich
habe am 21 Januar jedoch Projektbesprechunng und außer ner Menge
Problemen kann ich nichts vorweisen....
Platform: Win 7 64bit
Programme: Atmel Studio 6.0
hTerm od. Control Center (link gepostet)
ProgTool zum Brennen des Programmes
Chip: Atmega8
Systemboard: Board MK2 ->
http://shop.myavr.de/Systemboards/myAVR%20Board%20MK2,%20best%C3%BCckt.htm?sp=article.sp.php&artID=40
Bestückt mit der Bridge/Programmer
an das Board habe ich auf einem Breadboard eine Schaltung zur
Schrittmotorsteuerung aufgebaut und einen Schrittmotor daran
angeschlossen.
der Schrittmotor ist in einem Aluprofil eingebaut in welches ich ein
Getriebe gebaut habe an welchem sich zur Positionsermittlung ein
10stufiges Poti befindet. Dieses habe ich an den ADC Kanal 1 am Board
angeschlossen. Am Board ist dies Pin C1 welcher ja laut Datenblatt vom
Atmega8 einfach nur herausgeführt wurde auf einen Stiftsockel.
@Falk: Dein Quellcode in allen Ehren, aber das Resultat ist exakt das
gleiche. Sobald ich "kommunizieren" will startet das Programm auf dem
Chip. Starte ich nicht läuft da auch nichts ab.
@ Sven Weinmann (sickone4) >ich hab einen USB Programmer, welcher einen USB Anschluss hat, Der hat einen Namen und wahrscheinlich auch ein Datenblatt. Ein Link darauf wo diu ihn gekauft hast wäre auch gut. Siehe [[Netiquette]. >durch >welchen ich mein Programm vom PC via Programmer auf den Chip Brennen >kann. Auf gleichem Weg wird auch kommuniziert. Das klingt nach Bootloader. > Es würde mich sehr stark >wundern, wenn dein Chip mit deinem Terminal übers Telefon kommuniziert. Die coolen Sprüche solltest du dennen überlassen, die es drauf haben. >Wie der Programmer nun auch immer aussieht das ist meiner -> >http://shop.myavr.de/Programmer%20und%20Bridges/my... Das ist so ein Multifunktionsadapter, der kann sowohl programmieren als auch kommunizieren. >Eine alternative, welche ich noch habe zu dem Systemboard ist ein Kabel, >mit welchem ich von dem Programmer via Wannenstecker und Flachkabel >direkt auf ein Breadboard an einen µC gehen kann. Das hat den Vorteil, dass Programmierung und Kommunikation getrennt sind und man nicht immer umschalten muss. Ist für sich vielleicht besser.
> Sobald ich "kommunizieren" will startet das Programm auf dem > Chip. Starte ich nicht läuft da auch nichts ab. Dann musst du rausfinden, was dieses ControlCenter bzw. dein Brenner da eigentlich veranstaltet. Die Antwort findest du aber nicht hier im Forum sondern in der myAVR Doku (oder bei jemandem, der auch diese Konfiguration benutzt). Für mich sieht das momentan so aus, als ob dein Brenner den µC im Reset hält, solange bis er vom PC das Go bekommt. Das ist jetzt aber nur geraten und keineswegs eine Diagnose.
@ Sven Weinmann (sickone4) >@Falk: Dein Quellcode in allen Ehren, aber das Resultat ist exakt das >gleiche. Sobald ich "kommunizieren" will startet das Programm auf dem >Chip. Was soll es denn sonst machen! > Starte ich nicht läuft da auch nichts ab. Welch Überraschung! Mann O Mann! Das Programm spuckt dauernd den ADC-Wert über Terminal aus. Wenn du die Taste drückst, sollte die Steuerung 100 Schritte machen.
Falk Brunner schrieb: > Der hat einen Namen und wahrscheinlich auch ein Datenblatt. Ein Link > darauf wo diu ihn gekauft hast wäre auch gut. Siehe [[Netiquette]. Das hatte ich bereits getan...
Falk Brunner schrieb: > Das Programm spuckt dauernd den ADC-Wert über Terminal aus. Genau das tut es ja bei ihm laut Fehlerbeschreibung erst mal nicht. Die ganze Sache kommt erst dann ins laufen, wenn am PC in irgendwelche Datenmodi umgeschaltet wird. Ob jetzt Bootloader oder Reset vom Brenner .... keine blasse Ahnung. Und um ehrlich zu sein, ist es mir auch ziemlich ega..... Das Verhalten hat auf jeden Fall nichts mehr mit dem Programm zu tun sondern fällt unter die Kategorie "Kenne deine Entwicklungsumgebung".
welche Programmer benutzt ihr denn so, vielleicht sollte ich mri da einen anderen zulegen! Ich finde die Datenblätter auf der Seite sehr undurchsichtig. Ich werde mich an deren Support wenden und dies erfragen. Wenn ihr über eine andere Art und weise Kommuniziert also Sendet oder Empfangt wie macht ihr das? mit einer anderen Platine?
Also mir ist das noch nicht vollständig genug. Was für eine Entwicklungsumgebung benutzt Du? Das Sisy-Paket oder MyAVR Workpad? Oder was Anderes? Foto fehlt auch noch.
Sven Weinmann schrieb: > welche Programmer benutzt ihr denn so, vielleicht sollte ich mri da > einen anderen zulegen! > > Ich finde die Datenblätter auf der Seite sehr undurchsichtig. Ich werde > mich an deren Support wenden und dies erfragen. > > > > Wenn ihr über eine andere Art und weise Kommuniziert also Sendet oder > Empfangt wie macht ihr das? mit einer anderen Platine? Der Brenner steckt am ISP Stecker und von der UART geht ein anderes Kabel zum PC (mit einem FT232, der die USART/USB Umsetzung macht). Das sind 2 voneinander getrennte Dinge. Der Brenner wird nur dann aktiv, wenn er tatsächlich was brennen soll. Ist das erledigt, dann schaltet er sich wieder weg, so als ob er nicht am µC angesteckt wäre.
Aber das soll ja jetzt keine Ausrede für dich sein. Du weißt, was du tun musst, damit dein Programm anläuft und das ist schon mal die halbe Miete. Weiter gehts mit der Programmentwicklung! AUch im Hinblick darauf, dass deine Projektbesprechung schon in Bälde stattfindet. Das zieht sich nämlich sowieso schon zu lange hin, wenn ich bedenke, dass die Frage nach der Kontrolle über die Steps Ende September gepostet wurde und du noch nicht mehr hast als das bischen zusammenkopierten Code.
Sven Weinmann schrieb: > welche Programmer benutzt ihr denn so, vielleicht sollte ich mri da > einen anderen zulegen! Na na. Willst Du das später auch so machen? Nun schmeiss mal nicht gleich die Flinte in's Korn. > Ich finde die Datenblätter auf der Seite sehr undurchsichtig. Ich werde > mich an deren Support wenden und dies erfragen. Das muss so sein. Wenn sie durchsichtig wären, dann würden die Zeichen auf der gegenüberliegenden Seite, das Verständnis der zu Dir zeigenden erschweren. Scherz beiseite: Was soll das heissen? Das ist so eine Beschreibung wie "funktioniert nicht". Was ist konkret Dein Problem mit der Doku? > Wenn ihr über eine andere Art und weise Kommuniziert also Sendet oder > Empfangt wie macht ihr das? mit einer anderen Platine? Ich denke das ist nicht das Problem. Der Punkt ist, das jede Konfiguration auch eine bestimmte Vorgehensweise erfordert. Die kann man nicht aus allgemeinen Grundsätzen erschliessen sondern muss sie entweder aus den Details ableiten oder in der Doku nachlesen.
Angehängte Dateien:
-

IMG_0206.JPG
550 KB -

IMG_0205.JPG
440 KB
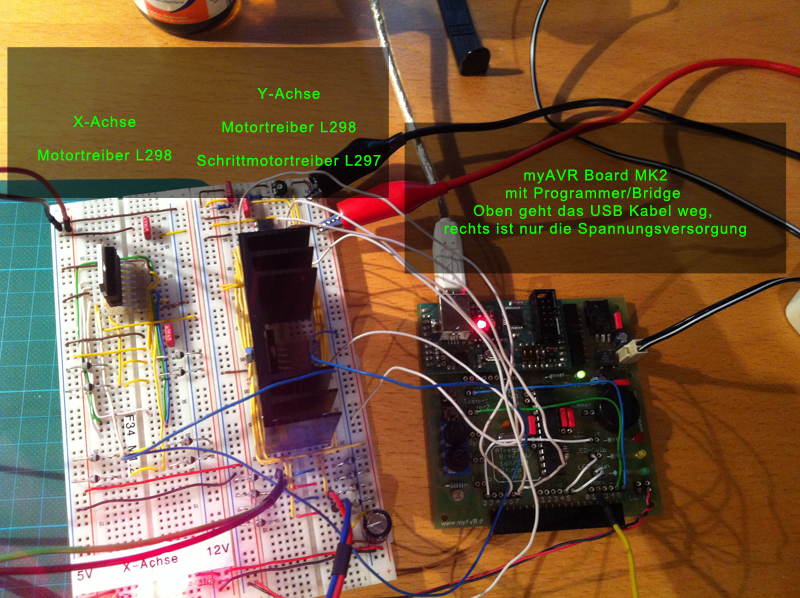
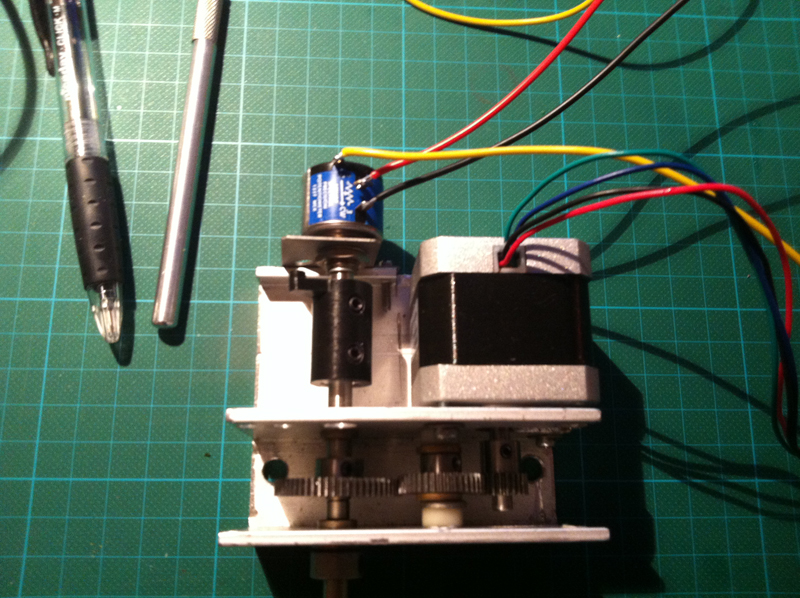
anbei die beiden Bilder. Zum Versuchsaufbau. Es existiert ein weiterer Alublock mit nahezu gleichem Aufbau, welcher jedoch mit einen einfachen DCMotor bestückt ist. Dies ist jedoch nicht im Quellcode enthalten derzeit, da ich mich hier speziell auf den Schrittmotor konzentriert habe! Der DCMotor soll durch einen PI-Regler geregelt werden, dies ist eine andere Baustelle.
Naja, das Problem ist halt der Multifunktionsadapter, den kann man per Software zwischen Programmieradapter und UART-USB Adapter umschalten. Das wird aber beim Testen reichlich nervig. Da du ja anscheinen ZWEI Programmieradapter hast (einer ist beim myAVR Board MK2 dabei, einen hast du einzeln gekauft, richtig?), ist es SEHR empfehlenswert, einen davon als einfachen ISP-Programmieradapter zu nutzen (mit dem 10pol) Flachbandkabel und den anderen als UART-USB Adapter. Dann muss man nicht immer umschalten. DAS musst du erstmal hinkriegen. Programmieren und UART-Anzeige, dazu reicht es "Hello World" dauerhaft zu senden.
nein ich habe nur einen, den, der auf dem Board ist. Ich hab nur den Link zu dem Programmer gepostet, da das Systemboard prinzipiell nichts anderes ist als das Breadboard. Die ISP Kontakte des Programmers sind auf dem Board zum µC geführt. Ob ich nun ein Kabel nutze zum Breadboard oder die Platine, auf der das schon fertig ist, ist im Prinzip egal.
Oh. Ich habe es überlesen. >Atmel Studio 6.0 Hier gibt es wohl auch Infos zu der Kombination: http://shop.myavr.de/index.php?sp=faq.sp.php
Frohes Neues zusammen! @Falk: Bei deiner Datei mit dem Script von PeDa hab ich ein Problem. Derzeit nutze ich ja einen Taster für das Setzen der Schritte. Dies soll allerdings später nichtmehr der Fall sein. Später wird die Flanke durch das Erreichen eines Bereiches erfasst. D.h. der DC-Motor fährt zum Endschalter in eine Richtung und dann soll der Schrittmotor sich drehen. Um aber Schäden vorzubeugen habe ich dem Endschalter keinen Wert sondern einen Bereich zugewiesen. Das PeDa Script allerdings wertet eben nur den Taster aus. Macht es da überhaupt Sinn mit einer Entprellung zu arbeiten? Oder ist es nicht sinnvoller dann einfach ein flag zu setzen und nach dem die Schritte gefahren wurden UND der Bereich wieder verlassen wurde dieses wieder zu löschen?
@ Sven Weinmann (sickone4) >Bei deiner Datei mit dem Script von PeDa hab ich ein Problem. Script? Das ist ein Makro. Erfinde keine neuen Namen für bestehende Dinge, sonst versteht dich keiner. Du hast noch viel mehr Probleme. Du beherrscht nicht mal das kleine 1x1, willst aber morgen die Fields-Medaillie gewinnen. http://de.wikipedia.org/wiki/Fields-Medaille Das klapppt nicht! Erstmal musst du die Grundlagen verstehen und erfolgreich umstetzen. D.h. hier konkret. 1.) Programmierung und Kommunikation mit deinem AVR. Dieser Multifunktionsadapter wird dich nicht glücklich machen fürchte ich. Denn beim Umschalten zwischen Programmiermodus und Kommunikationsmodus musst du wahrscheinlich in deinem Terminalprogramm immer wieder eine neue Verbindung aktivieren, weil der Treiber zwischendurch "weggeschaltet" wird. Mein Tipp. Besorg dir einen 2. Adapter und nutze dann einen nur zum Programmieren und einen nur zum Kommunizieren. Dann musst du sauber und problemlos Daten vom AVR empfangen können bzw. an ihn senden. 2.) Entprellung und Flankenauswertung des Tasters. Dann musst du schrittweise dein Programm erweitern. Möglicht nicht mit zusammenkopierten Quelltextfragmenten, sondern mit selbstgeschriebenen, verstandenen Funktionen. Das ist auch der Sinn von Schulprojekten. Verstehen, nicht kopieren. Viel Erfolg.
ich fange echt an an mir zu zweifeln.... ich hab dir eine frage gestellt und du erzählst mir etwas völlig anderes.... ich will weder etwas über medallien noch möchte ich das thema von gestern erneut aufgreifen. wir haben festgestellt, dass der programmer den ich nutze nicht das gelbe vom ei ist und ich mir auf kurz oder lang alternativen suchen sollte. gleichzeitig hab ich auch eine email an den support gesendet und dort nachgefragt bezüglich des programmers. aber meine frage hat nun leider nichts mit deiner antwort zutun....
@ Sven Weinmann (sickone4) >aber meine frage hat nun leider nichts mit deiner antwort zutun.... Deine Frage kann man diskutieren, wenn die die nötigen Grundlagen geschaffen hast. Alles andere ist nur heiße Luft. Eine weitere Baustelle, die du möglichst schnell grundlegen bearbeiten solltest, ist dein Versuchsaufbau. Steckbrett ist so lala, aber die vielen fliegenden Verbindungen werden dir viele Wackelkontakte und Probleme bereiten. Die muss man erstmal solide machen, sprich ordentlich Verbindungen schaffen. Ausserdem kann sich bei deinen Infromationsfragmenten kein Mensch deinen realen Aufbau vorstellen. Ein gescheite Skizze inklusive Beschreibeung wäre dringend nötig, siehe Netiquette.
werde dir gerne eine Skizze liefern. Wenn ich dafür Zeit finde.
-> Netiquette
> Tonfall und Inhalt sollten dem Zielpublikum gegenüber angemessen sein
Ich frage mich bei deinen Aussagen ob du das wirklich einhälst...
Ich bin weder ein Depp noch bin ich Dumm. Ich hab ein Schwachkopf als
Lehrer, der Kopieren vor Kapieren schiebt. Das ist mein Problem. Und wie
soll man innerhalb eines halben Jahres C lernen wenn man im Unterricht
nichts als kopieren lernt?
Ich mache dir keinen Vorwurf damit, das ist alleine das Problem des
Lehrers, denn ich kann nichts mehr machen als mich hier zu informieren
und mein C-Buch da anzulesen, wo es meine Problemstellung gerade
verlangt. Aber irgendwann finde ich diese "du kannst dies nicht und
jenes nicht" nicht mehr nett.
Ich hab Ende Januar Projektbesprechnung für die Vornoten und wirklich
besseres zutun als mich ständig zu erklären, wieso weshalb und waurm ich
jene Grundlage nicht weiß.
Ich habe dich gefragt ob die Flankenerkennung wie sie in PeDas Makro
verwandt wird auch für Bereiche funktioniert.
Sven Weinmann schrieb: > Ich frage mich bei deinen Aussagen ob du das wirklich einhälst... > Ich bin weder ein Depp noch bin ich Dumm. "dumm" schreibt man klein... SCNR > Ich hab ein Schwachkopf als Lehrer, der Kopieren vor Kapieren schiebt. > Das ist mein Problem. Und wie soll man innerhalb eines halben Jahres C > lernen wenn man im Unterricht nichts als kopieren lernt? Hausaufgaben gibt es nicht mehr? > > Ich mache dir keinen Vorwurf damit, dass ist alleine das Problem des > Lehrers, denn ich kann nichts mehr machen als mich hier zu informieren > und mein C-Buch da anzulesen, wo es meine Problemstellung gerade > verlangt. Aber irgendwann finde ich diese "du kannst dies nicht und > jenes nicht" nicht mehr nett. Vielleicht wäre ein etwas einfacheres Projekt besser für den Einstieg?! > > Ich hab Ende Januar Projektbesprechnung für die Vornoten und wirklich > besseres zutun als mich ständig zu erklären, wieso weshalb und waurm ich > jene Grundlage nicht weiß. Tust du aber schon. > > Ich habe dich gefragt ob die Flankenerkennung wie sie in PeDas Makro > verwandt wird auch für Bereiche funktioniert. Ja, natürlich.
im kopf ja im prinzip ist das auch relativ einfach wenn man sich die kiste anschaut. es gibt eine X-achse und eine Y-Achse an der x-achse ist ein schlitten dran, an welchem ein sensor dran "hängt" es soll eine schneckenfahrt realisiert werden. sprich -> fahre x nach x_hi dann schrittmotor y-schritte, dann x -> x_lo und wieder schritte nach y also ein schneckenablauf:
1 | _ _ |
2 | | | | | | |
3 | | | | | | |
4 | | | | | | |
5 | | |_| |_| .... |
währenddessen soll der sensor werte erfassen und via UART an eine Excel Tabelle senden. Damit das auch sinn macht hab ich einen Timer genommen, welcher mit 1ms getaktet ist. damit soll sowohl die PI-Regelung der X-Achse (DC motor) als auch die Taktung des Schrittmotors UND die Taktung der Sensor-Werterfassung geregelt werden. Prinzipiell soll damit eine Oberfläche analysiert werden können, was ich aber nicht als aufgabe habe, sondern nur die werterfassung. der sensor selbst ist bisher nicht bestandteil des quellcodes, da ich zunächt die bahnsteuerung fertig machen möchte. dass das nun kein richtiger ablaufplan ist weiß ich. und einen PAP mit einem programm habe ich noch nicht erstellt.
Sven Weinmann schrieb: > im kopf ja schon schlecht. Besser ist es, sowas auf Papier zu machen, da man dort Sachen sieht, die man bei reiner Kopfarbeit ignoriert (ich spreche aus Erfahrung). Sven Weinmann schrieb: > dass das nun kein richtiger ablaufplan ist weiß ich. und einen PAP mit > einem programm habe ich noch nicht erstellt. Sowas macht man auch auf Papier. Sven Weinmann schrieb: > währenddessen soll der sensor werte erfassen und via UART an eine Excel > Tabelle senden. > > Damit das auch sinn macht hab ich einen Timer genommen, welcher mit 1ms > getaktet ist. > > damit soll sowohl die PI-Regelung der X-Achse (DC motor) als auch die > Taktung des Schrittmotors UND die Taktung der Sensor-Werterfassung > geregelt werden. Und wie könnte man das alles in einzelne Funktionen gleidern? Nimm es nicht zu persönlich, aber Falk und Karl-Heinz haben Recht: Dir fehlen Grundlagen. Und nicht nur in C, sondern allgemein im Lösen von Problemen bzw. im Umsetzen von Lösungen in Algorithmen. Du forderst zu viel in zu kurzer Zeit. Muss das Ding bis Ende Januar fertig sein? Oder reicht ein stichhaltiges Konzept?
@Sven Weinmann (sickone4) >werde dir gerne eine Skizze liefern. Wenn ich dafür Zeit finde. Du musst nicht, aber erwarte dann auch keine große Hilfe. >-> Netiquette >> Tonfall und Inhalt sollten dem Zielpublikum gegenüber angemessen sein >Ich frage mich bei deinen Aussagen ob du das wirklich einhälst... Angemessen heißt nicht automatisch kuschelweich. >Ich bin weder ein Depp noch bin ich Dumm. Hat keiner behauptet. Aber du bist eher chaotisch, willst zuviel zu schenll mit zuwenig Grundlagen. Vergiss es. > Ich hab ein Schwachkopf als >Lehrer, der Kopieren vor Kapieren schiebt. Das ist mein Problem. Und wie >soll man innerhalb eines halben Jahres C lernen wenn man im Unterricht >nichts als kopieren lernt? Wenn das WIRKLICH so ist, ist das ein Problem. Das können wir aber nicht lösen. >Lehrers, denn ich kann nichts mehr machen als mich hier zu informieren >und mein C-Buch da anzulesen, wo es meine Problemstellung gerade >verlangt. FALSCH! Dieses Flickwerk geht schief. Man muss sicherlich nicht C aus dem FF beherrschen, aber man braucht definitiv ein gewisses Minimum an Programmierwissen, nicht nur einzelne Fragmente. Das wird nix. D.h. Du musst auch grundlegende Dinge dir erstmal aneignen, die du im Moment scheinbar noch nicht brauchst. Wenn gleich das als Schüler der (wievielten) Klasse in Grenzen im Selbststudium verlangt werden kann. Der Unterricht muss schon den deutlich größeren Anteil leisten. > Aber irgendwann finde ich diese "du kannst dies nicht und >jenes nicht" nicht mehr nett. Das "bliebte" Thema Kritikfähigkeit. Jaja, wollten wir damals auch nicht hören, ist aber so. Was soll man mit dir über komplexere Programmstrukturen reden, wenn dir die Grundlagen fehlen? >Ich hab Ende Januar Projektbesprechnung für die Vornoten AHA! Ziel sind lediglich gute Noten, nicht solide Inhalte. Ok, damit bist du auf dem richtigen Weg zum BWLer oder Chef, nicht aber zum Ingenieur. Ist OK. > und wirklich >besseres zutun als mich ständig zu erklären, wieso weshalb und waurm ich >jene Grundlage nicht weiß. Richtig, du musst sie dir erarbeiten. Nur dann geht es weiter. >Ich habe dich gefragt ob die Flankenerkennung wie sie in PeDas Makro >verwandt wird auch für Bereiche funktioniert. Was denn für Bereiche? "Derzeit nutze ich ja einen Taster für das Setzen der Schritte. Dies soll allerdings später nichtmehr der Fall sein. Später wird die Flanke durch das Erreichen eines Bereiches erfasst." Diesen Satz versteht kein Mensch! Eben weil es keine gescheite Beschreibung deines Aufbaus gibt. Und ohne verständliche Kommunikation mit anderen Leuten wird das nix. Da könnten wir genauso chinesisch reden. "Um aber Schäden vorzubeugen habe ich dem Endschalter keinen Wert sondern einen Bereich zugewiesen." Wie soll man das verstehen? Ein Endschalter schaltet am Ende, wo sonst? Wie wird da ein Bereich draus? "Das PeDa Script allerdings wertet eben nur den Taster aus. Macht es da überhaupt Sinn mit einer Entprellung zu arbeiten?" O Mann. Nun reden wir schon eine Halb Ewigkeit über die Notwendigkeit, Taster zu entprellen, und du stellst das einfach mal eben wieder in Frage. AUA! "Oder ist es nicht sinnvoller dann einfach ein flag zu setzen und nach dem die Schritte gefahren wurden UND der Bereich wieder verlassen wurde dieses wieder zu löschen?" Das versteht keiner, eben weil niemand ausser dir deinen Aufbau kennt, ebenso wie das Ziel des Projekts! Jaja, i letzten Posting hast du etwas dazu geschrieben, reicht aber nicht.
In der einen Achse habt ihr einen Schrittmotor und in der anderen einen normalen Motor? Wer hat sich denn das ausgedacht, oder soll das gar kein reales Projekt werden sondern nur Übungszwecken dienen? Da hast du ja noch einiges vor dir. >>und mein C-Buch da anzulesen, wo es meine Problemstellung gerade >>verlangt. > >FALSCH! Dieses Flickwerk geht schief. Seh ich ganz genau so. Auf der einen Seite sollten wir uns zu diesem Zeitpunkt bereits über 'Konzepte' (am Beispiel Malerei) wie Bildkomposition und Lichteinfall unterhalten, auf der anderen Seite sollten wir dir erst mal Pinsel auswaschen beibringen. Da klafft eine enorme Lücke dazwischen und ich weiß ehrlich gesagt nicht, wie man die von unserer Seite aus überbrücken soll. Denn das nächste Problem ist ja, dass es mit den Kentnissen aus dem C-Buch nicht getan ist. Denn was ein C-Buch nicht vermitteln kann, das ist die Praxis.
Sven Weinmann schrieb: > dass das nun kein richtiger ablaufplan ist weiß ich. und einen PAP mit > einem programm habe ich noch nicht erstellt. Brauchst du auch nicht 'mit einem Programm machen'. Ganz im Gegenteil. 'Mit einem Programm machen' bedeutet in der Praxis, dass man 90% der Zeit damit vertrödelt, irgendwelche Programmfunktionen zu verstehen, Menüpunkte zu suchen, bzw. 100-tausend mal Fonts umstellt, Texte anders einfärbt etc. etc. Papier, Bleistift und Radiergummi. Mehr braucht man nicht. Du wärst überrascht, wenn du die Schreibtische der Profis sehen könntest. Ich kennen KEINEN, bei dem nicht neben der Tastatur ein Stapel Schmierpapier und Kugelschreiber liegen würde. In den letzten 3 Jahren hab ich mindestes 5 Collage-Blocks mit Notizen, Debug-Werten, skizzierten Abläufen, Algorithmentests, .... vollgeschrieben. Und die Wand hinter mir ist tapeziert mit Skizzen, in denen spezielle CAD-Situationen, Variablen und deren Zusammenhänge, Formelwerk etc. festgehalten sind. Mit einer Textverarbeitung würde ich heute noch zeichnen, was ich mit Bleistift in 10 Minuten skizzieren kann.
Hallo, habt ihr schon die Fragestellung für das Umschalten des mySmartUSB MK2 in den Datenmodus gelöst? Wenn nicht dann hier mein hinweis dazu... Das geht per Kommandosequenz via Software siehe technische Beschreibung Seite 14 mySmartUSB MK2 - Kommandos: Baudrate: 19200,8,n,1 Präfix/Format: "æμº¹²³©"+Kommando als ASCII-Zeichen (= 0xE6 0xB5 0xBA 0xB9 0xB2 0xB3 0xA9) Kommandos: r Reset Board R Reset Programmer + Board-Power-On - Board-Power-Off p Programmier-Modus d Daten-Bypass/ Durchreich- Modus RS232 q Quite-Modus i Status wird zurückgegeben Returncodes von mySmartUSB MK2 - Kommandos: '÷' = 0x7F '±' = 0xB1 das Kommando (z.B. 'd' für Datenmodus) 13 (=CR) 10 (=LF) oder man kann es manuell per DIP-Schalter erzwingen, siehe Seite 8: Datenmodus erzwingen (UART-USB-Bridge) / Forcing the data-mode (UART-USB-Bridge) · DIP 2 ON · DIP 3 OFF · DIP 4 OFF http://www.myavr.info/download/produkte/mysmartusb_mk2/techb_mysmartusb-mk2_de_en.pdf Gruß
Sven Weinmann schrieb: > wir haben festgestellt, dass der programmer den ich nutze nicht das > gelbe vom ei ist und ich mir auf kurz oder lang alternativen suchen > sollte. Der Programmer ist schon okay. Ihn nur abewechselnd auch für die UART-Übertragung zu nutzen ist Käse. Kauf Dir das noch dazu: http://shop.myavr.de/Programmer%20und%20Bridges/myUSBtoUART.htm?sp=article.sp.php&artID=200024 Kostet 7,95 EUR und Du hast einen extra UART für Deine Kommunikation. Dann musst Du nicht umschalten, sondern kannst von Anfang an beobachten, was sich auf dem UART tut. Bis Du umgeschaltet hast, ist für den µC schon eine Ewigkeit vergangen.
@ Frank: wie soll es denn möglich sein die uart zu trennen? klar bei meinem kombinierten programmer garnicht erst in den UART Modus um zuschalten... ABER wenn das programm doch erst läuft wenn ich den datenmodus aktiviere dannstimmt da doch irgendwas anderes nicht. ich kann mit dem uart to USB adapter ja viaRxD und TxD auf meinen Atmega zugreifen, aber der Programmer ist ja hardwaretechnisch immernoch verbunden. Irgendwie macht das keinen Sinn für mich, da sich ja eigentlich nur folgende Situation einstellen wird: Programmer(Kombiniert) -> brennen UART_USB -> Kommunizieren was aber wenn der Programmer dennoch das Programm nicht freigibt?
@ Sven Weinmann (sickone4) >wie soll es denn möglich sein die uart zu trennen? Indem man ZWEI Adpater nutzt. Einen für's Programmieren, einen für's UART. >ABER wenn das programm doch erst läuft wenn ich den datenmodus aktiviere >dannstimmt da doch irgendwas anderes nicht. Sieht so aus. >ich kann mit dem uart to USB adapter ja viaRxD und TxD auf meinen Atmega >zugreifen, aber der Programmer ist ja hardwaretechnisch immernoch >verbunden. Das stört nicht, der hält ruhig. >Irgendwie macht das keinen Sinn für mich, da sich ja eigentlich nur >folgende Situation einstellen wird: >Programmer(Kombiniert) -> brennen >UART_USB -> Kommunizieren Passt doch. >was aber wenn der Programmer dennoch das Programm nicht freigibt? Dann hat der Programmer ein Problem. DAS musst du zuerst lösen.
Falk Brunner schrieb: > Indem man ZWEI Adpater nutzt. Einen für's Programmieren, einen für's > UART. Ja völlig klar! werde ich in Zukunft auch machen! hab das gute Teil mal bestellt und werde es testen und hoffe schon jetzt, dass ich mit dem Programmer keine weiteren Kuriositäten mehr haben werde
Angehängte Dateien:
-

Bahnsteuerung.png
130 KB -

Grundstellung.png
37 KB
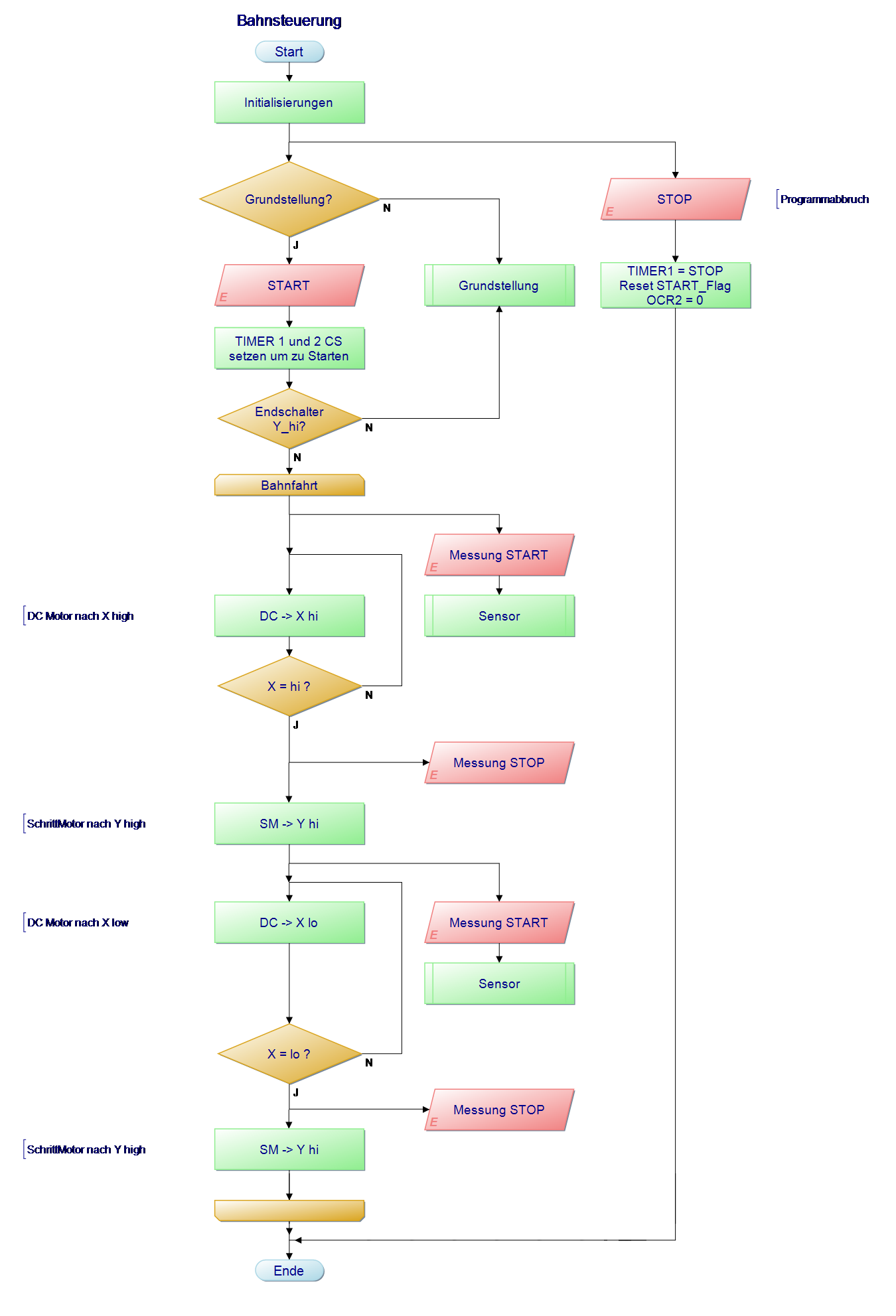
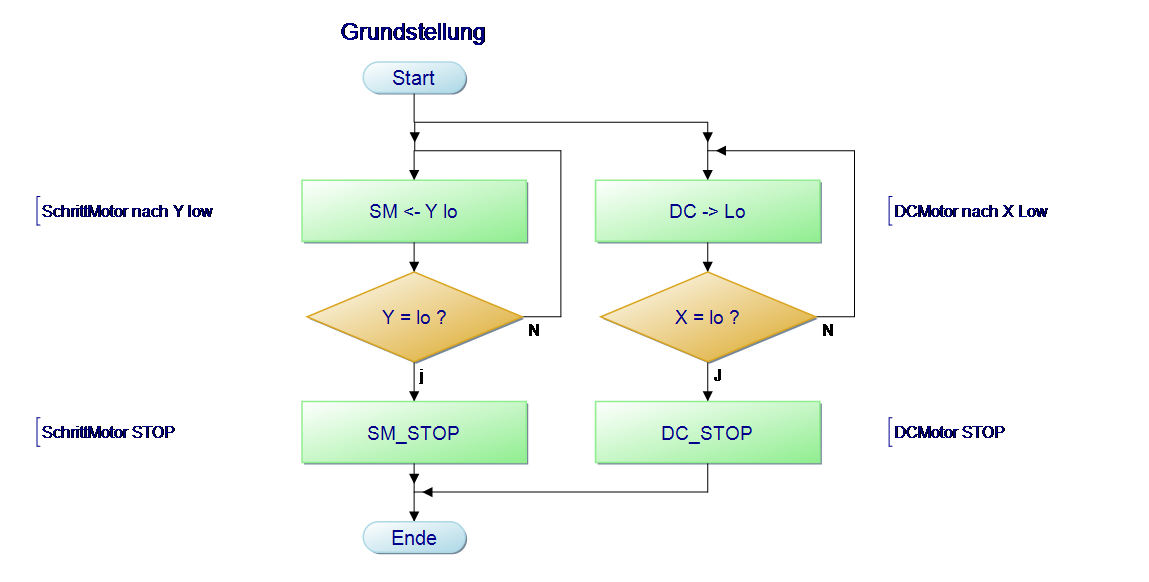
So da sind mal zwei Dateien mit dem eigentlichen Programm, wie es derzeit in meinem kopf rumschwirrt. Das ist sozusagen Version 1
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.