Hallo zusammen, ich habe ein Projekt vor das sich mit der Positionsbestimmung beschäftigt. Ich habe mehrere Objekte die ich ein einem Ruam 10m x 5m orten will. Die Positionsdaten der einzelnen Objekte will ich dann an den PC gesendet bekommen. Habe jetzt schon sehr viel gelesen und mich informiert. Beim lesen bin ich auf Infrarot, Ultraschall. Meine Frage ist: Welche Systeme gibt es mit denen ich mehrere Objekte orten kann. Genauigkeit sollte min. +/- 1cm sein. Vielen Dank für eure Bemühungen Gruß Fabi
Fabian Müller schrieb: > Genauigkeit sollte min. +/- 1cm sein. Sportlich. Schau dir mal an wie die das an der ETH mit den Quadrocoptern machen.
Ich hab kürzlich Atmels neue Ranging getested und kann ca. 50cm Genauigkeit erzielen. Atmel bietet zwar lediglich eine Lösung für Entfernungsmessung zwischen zwei Objekten, basierend darauf kann man zwischen verschiedenen Anker Nodes die Entfernung ermitteln und mit etwas Mathematik daraus die Lokalisierung erreichen. Schau mal hier: http://www.atmel.com/products/microcontrollers/wireless/default.aspx?tab=documents und such nach Ranging Ich kann Dir leider meine Algorithmen nicht zur Verfügung stellen da die IP meiner Firma gehört, aber wenn Du mit Mathe klar kommst, kriegst Du bestimmt was nettes hin
Fabian Müller schrieb: > Genauigkeit sollte min. +/- 1cm sein. 1) Wenn es mehrere Objekte gibt, ist gegenseitige Verdeckung natürlich nicht ausgeschlossen. Für eine Ortung müssen aber immer mindestens zwei Sensoren das zu ortenden Objekt sehen können. D.h.: abhängig von der Anzahl der Objekte und der akzeptablen Ausfallrate der Ortung brauchst du sowieso schonmal deutlich mehr als zwei Sensoren. 2) 1 cm Auflösung bei bis zu 10 m Entfernung erfordert entweder hochauflösende Sensoren mit ausreichend "Weitblick" (Weitwinkelobjektiv) oder alternativ weniger hochauflösende Sensoren mit Teleobjektiv, davon dafür dann aber wesentlich mehr. So oder so: das geht massiv in's Geld. Die preiswerteste Umsetzung wäre wohl: Standard-PC mit möglichst vielen USB-Hostadaptern und reichlich Webcams. Dabei ist ein Problem noch nichtmal angerissen: Du hast nämlich nix über den temporalen Aspekt der Sache gesagt. Wie schnell bewegen sich die Objekte, wie oft muß also die Messung aktualisiert werden, um die Genauigkeitsanforderung zu wahren. Die Beantwortung dieser Frage könnte dann ganz schnell den Billichansatz mit Standard-Consumer-Hardware wieder vom Tisch wedeln und die Sache damit nochmal eine oder zwei Zehnerpotenzen teurer werden lassen...
Fabian Müller schrieb: > Hallo zusammen, > ich habe ein Projekt vor das sich mit der Positionsbestimmung > beschäftigt. > > Ich habe mehrere Objekte die ich ein einem Ruam 10m x 5m orten will. > Die Positionsdaten der einzelnen Objekte will ich dann an den PC > gesendet bekommen. > > Habe jetzt schon sehr viel gelesen und mich informiert. > Beim lesen bin ich auf Infrarot, Ultraschall. > > Meine Frage ist: > Welche Systeme gibt es mit denen ich mehrere Objekte orten kann. > > Genauigkeit sollte min. +/- 1cm sein. > Naja.... da Du einiges an Infos noch nicht herausgerückt hast läßt sich nur vergnüglich spekulieren. Der Raum den Du nennst ist ja im Moment nur eine Fläche. Und das hat den Vorteil, daß Du das mit einer Kamera von oben betrachten kannst (Fischauge). Der Rest ist viel Rechnen. Ansonsten: 2 Kameras an den x/y Seitenwänden, die das über eine geschickte Bildverarbeitung ausmessen, wird aber acuh nicht einfach sein. Ultraschall auf 10m mit 1cm Genauigkeit. sportlich, vor alllem wenn die Objekte nicht gut reflektieren. BTDT, 6m mit 6cm Auflösung, nicht Genauigkeit, war aber mehr als ausreichend. Grüße MiWi
Beitrag "TOBBY THE ROBBY" PDF-Datei Seite 3 unter Optionen (Position Dedection). >Meine Zielanwendungen liegen im KI-Bereich: "Schwarm Intelligenz" und ein LPDS (Local Position Detection System = mini GPS), d.h. TOBBY(s) soll(en) einen Raum (Zimmer inkl. Möbel) autonom erfassen und auf eine SD-Card digitalisieren (SD-Card).
Ein Objekt ist in erster Näherung mit 2 Kameras, auf einer Fläche zu
erfassen.
Sollte man meinen. Stimmt aber nur mit jeder Menge Einschränkungen.
1. Die Kameras müssen die gesamte Fläche lückenlos erfassen.
2. Die gesamte Fläche muss frei sein.
3. Die Objekte müssen mit ausreichender Genauigkeit erfassbar sein.
Schon das ist nur mit wenigen Einschränkungen unmöglich.
- Eine Katze, der sich das Fell stäubt verändert ihren Umriss um
mehrere Zentimeter, ohne sich zu bewegen.
- Ein bisschen Zugluft reicht aus, um deine Zimmerpalme zu bewegen,
ohne das ihr Beine gewachsen sind.
- Last, aber bestimmt nicht least, wenn Du dich auf der Stelle
drehst, bewegst Du dich ohne Dich zu bewegen. Übrigens einmal
tief Luft holen tut's auch.
Wehe, Du nickst jetzt auch noch mit dem Kopf!
Also ein Zylinder aus einem festen Material sollte mit entsprechender
Genauigkeit fixierbar sein, aber nur wenn er auch senkrecht steht.
Aber all das ist schon Makulatur, wenn es tote Winkel gibt, oder wenn
mehr als ein Objekt auf dem Spielfeld rumlungert.
Wie sieht es eigentlich mit der dritten Dimension aus. Da können sich
Objekte nicht nur durch Bewegung in X- oder Y-Richtung überdecken
sondern auch durch eine Bewegung in der Vertikalen.
Nur ein paar "Wenn's". Trotzdem viel Spaß.
Willst Du jetzt durch stationäre Sensoren die Position bewegter Objekte erfassen, oder sollen die Roboter (wie bei GPS) ihre eigene Position ermitteln? Das Ermitteln der eigenen Position könnte man Optisch realisieren, wie der der Wii. Du hängst zwei unterschiedlich farbige Lampen an die Decke (bei der Wii Sensorleiste sind es zwei unterschiedliche farbige IR-LED's) und stattest die Roboter mit Kameras aus, die diese Lichtpunkte erfassen. Der Rest wäre dann relativ simple Bildauswertung. Wobei ich fürhcte, dass die Genauigkeit schauch dabei schwierig wird.
Hi, ich habe da in der Vergangenheit diesbezüglich etwas experimentiert. Wollte damals eine Art GPS im Ultraschall machen. Problem: Wie bei GPS gibt's da (mehrfach-) Reflexionen, und die Auswertung benötigt eine gehörige Menge an schlauen Algorithmen, mit Doppler muss man auch noch klarkommen. Wurde zu aufwendig... So bin ich also bei einer optischen Lösung mit LEDs gelandet. Zentimetergenauigkeit könntest Du da mit der geeigneten Optik und Kalibrierung schon hinkriegen. Die Frage ist, wie zuverlässig es funktionieren muss. Was in meinem Fall die Ortung mehrerer Objekte angeht: Jeder "LED-Tracker" hat eine eigene ID, die er als Bitsequenz über eine optische Modulation an die Kamera durchgibt. Die Kamera (HW-Kosten um ca 250€) gibt faktisch die 2D-Koordinaten und zugehörige ID aus, per zweite Kamera hat man dann 3D. Mit der gleichen Technik kann man auch 3D Vermessung a la Kinect machen, aber das ist eine andere Story :-) Braucht auf jeden Fall - ob akustisch oder optisch - eine Menge Forschung. Ein Jahr würde ich mindestens mal für einkalkulieren (und auch die Patentfragen nicht vergessen, da gibt es einige Stolperfallen, wenn man's industriell nutzbar machen möchte..)
Hallo zusammen, erstmal will ich mich sehr für eure ganzen Beiträge bedanken. Es ist wirklich fantastisch in diesem Forum. Ich habe mir jetzt im Kopf ein System ausgedacht. Will da einfach mal ein bisschen forschen. Werd dazu aber ein anderes Thema aufmachen, weil dies dann hier nicht mehr reinpasst. Vielen, vielen Dank Gruß Fabi
Angehängte Dateien:
-

Positionen.png
1,7 KB
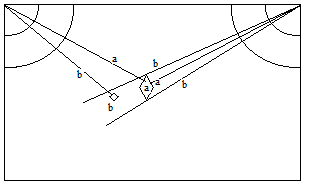
Hi Die Firma IFM hat einen Laser Abstandsmesser für <300€. Das ist nicht billig für den Privatmann, aber du schreibst ja nicht, wo dein Limit ist. Wenn du 2 (evtl.3) auf eine 90° schwenkbare Plattform setzt, dann bekommst du über 2 (3 )Werte die Position im Raum. Siehe Skizze. Der Rest ist mit Winkelberechnung reine Geometrie. Gruß oldmax
Es gab einige erfolgreiche Versuche (im WWW), mit 3 bis 4 festen Ultraschallsendern und einer festen IR-Sende-Diode. Der (die) Empfäger "sehen" den Startblitz der IR-Diode und "hören" die US-Sender, welche in einer festen zeitlichen Reihenfolge mit genügend Abstand nacheinander ihre Kennung senden. Daraus kann der Empfänger dann seine Position bestimmen. Andersherum geht das auch. Das bewegliche Objekt sendet den IR-Startpuls und eine US-Kennung. Die 3 oder 4 festen Empfänger empfangen den IR-Puls und nach einiger Zeit die US-Kennung. Eine Zentrale errechnet dann aus allen Werten die Position des beweglichen Objekts. Blackbird
DAS ist eine coole Methode, sehr gut. Habe nämlich auch schon so etwas überlegt für ein Robofahrzeug im Garten. Wobei es da mit der IR-Diode etwas schwierig wird im Tageslicht. Wie weit ist denn die Reichweite, die man mit Ultraschall realisieren kann? Gibt es Sender, die 20 Meter schaffen?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.