Ich bin gerade auf diesen Artikel gestoßen: http://spectrum.ieee.org/automaton/robotics/robotics-hardware/a-thousand-kilobots-self-assemble Die Konstruktion der Roboter ist hier beschrieben: http://www.eecs.harvard.edu/ssr/projects/progSA/kilobot.html Der Antrieb erfolgt durch zwei Handy-Vibrationsmotoren. Ein ziemlich cleveres Konzept. Auf Aliexpress gibt es die Motoren sehr günstig. (z.B. hier http://www.aliexpress.com/item/FREE-SHIPPING-new-3V-Coin-Vibration-Vibrating-Vibrator-Micro-Motor-Flat-10mmx3-4mm-diameter/545342712.html) Hat jemand dazu weitere Quellen oder Beispiele? Mir ist noch nicht intuitiv klar, wie die Vibration in eine gerichtete Bewegung umgesetzt wird?
:
Bearbeitet durch User
> wie die Vibration in eine gerichtete Bewegung umgesetzt wird?
Das wüsste ich auch gerne mal. Könnte eine spaßige Bastelei werden -
wenn man einen Plan hat.
Das gibt es schon länger. Z.B. http://www.evilmadscientist.com/2007/bristlebot-a-tiny-directional-vibrobot/ von 2007. Such mal nach "Bristlebot".
Stefan us schrieb: >> wie die Vibration in eine gerichtete Bewegung umgesetzt wird? > > Das wüsste ich auch gerne mal. Könnte eine spaßige Bastelei werden - > wenn man einen Plan hat. Habe einen Preprint des Papers gefunden, auf das sich die Kilobot-Entwickler beziehen. Siehe Anhang.
Bitlfüsterer schrieb: > Das gibt es schon länger. Z.B. > http://www.evilmadscientist.com/2007/bristlebot-a-tiny-directional-vibrobot/ > von 2007. > Such mal nach "Bristlebot". Lustige Idee. Da Kunst wird aber darin bestehen, die Bewegung auch zu kontrollieren :)
Hier gibt es die Motoren fast geschenkt: http://www.ebay.com/itm/5x-Flat-Button-Type-Micro-Vibrator-Motor-0-06A-3V-4-5V-F-Cellphone-10-3mm-Useful-/111226285226
Tim schrieb: > Bitlfüsterer schrieb: >> Das gibt es schon länger. Z.B. >> http://www.evilmadscientist.com/2007/bristlebot-a-tiny-directional-vibrobot/ >> von 2007. >> Such mal nach "Bristlebot". > > Lustige Idee. Da Kunst wird aber darin bestehen, die Bewegung auch zu > kontrollieren :) Naja. Ich will mich mal ein wenig aufspielen (sic): Wenn ich es verstehen kann, dann können es die meisten verstehen. ;-) Schnappt Euch die Bürste aus dem Badezimmer und spielt mal ein wenig damit. Das Prinzip ist intuitiv zu erfassen.
Bitflüsterer schrieb: >> Lustige Idee. Da Kunst wird aber darin bestehen, die Bewegung auch zu >> kontrollieren :) > > Naja. Ich will mich mal ein wenig aufspielen (sic): Wenn ich es > verstehen kann, dann können es die meisten verstehen. ;-) > Schnappt Euch die Bürste aus dem Badezimmer und spielt mal ein wenig > damit. Das Prinzip ist intuitiv zu erfassen. Bei der Zahnbürste wird die Ausrichtung der Borsten ausgenutzt, welche für einen Richtungsabhängigen Reibungskoeffizienten sorgen. Die Bewegungsrichtigung wird hier durch die Borsten definiert und lässt sich nicht kontrollieren. Das Prinzip der Kilobots ist ein wenig anders, aber offenbar auch nicht so kompliziert. Durch die Bewegung der Schwungmasse des Vibrationsmotors "hüpft" der Roboter senkrecht zur Drehachse in eine Richtung, die von der Drehrichtung des Motors abhängt. Durch zwei Motoren kann man die Plattform nicht nur parallel verschieben, sondern auch drehen. Im Paper wird nachgewiesen, dass das Konzept auch funktioniert, wenn die Motoren nicht synchron sind. Wichtig ist, den Reibungswiderstand der Plattform zur reduzieren. Daher steht die Plattform auf drei Beinen. Damit es klappt, müssen die Systemparameter der Bedingung auf S.4 oben rechts im Paper genügen.
:
Bearbeitet durch User
Tim schrieb: > Bei der Zahnbürste ... Das ist aber garnicht der Punkt, wenn Du über die Richtung der Bewegung und ihre Kontrolle schreiben willst. Es ist wohl wahr, dass eine von der senkrechten abweichende Richtung der Borsten eine Vorzugsrichtung ergibt, in die der Effekt mit geringeren Kräften zu erreichen ist - aber ebenso wahr ist, dass das Prinzip als im wesentlichen universal in Bezug auf die Richtung erkennbar ist und die Neigung der Borsten nur eine Variante. Und wer das Prinzip erkennt, hat auch die Möglichkeit zu erkennen, was die Invarianten sind und was nicht. (Ich hatte allerdings eher an eine Badebürste gedacht). Übrigens beruht das Prinzip, wenn ich es recht verstehe, nicht auf einem "Hüpfen" sondern auf "Kippen" (Tipping) und "Gleiten" (Sliding). Was willst Du eigentlich sagen? Das ist wahnsinnig kompliziert und man kann es nicht durch betrachten einer Bürste erkennen? Das halte ich für unzutreffend. Aber gut: Du bist anderer Meinung.
Hallo Bitflüsterer,
ich habe oben nur laut gedacht, nachdem ich das Paper gelesen hatte.
Dass die Ansätze zwischen Bristlebot und Kilobot unterschiedlich sind,
sieht man schon daran, dass sich der Bristebot in Richtung der Drehache
des Motors bewegt, während der Kilobot sich senkrecht dazu bewegt.
So wie ich das Paper verstehe, ist mit wm_tip "Tipping" ein Grenzfall
gemeint, bei dem die Winkelgeschindigkeit des Motors so hoch ist, dass
die Platform kippt. Mit einem "Handymotor" ist dieser Fall
wahrscheinlich überhaupt nicht erreichbar. Unterhalb von wm_sl
("Sliding") bewegt sich die Platform gar nicht. Also muss Omega zwischen
diesen beiden Werten liegen.
:
Bearbeitet durch User
Tim schrieb: > Hallo Bitflüsterer, > ... > Dass die Ansätze zwischen Bristlebot und Kilobot unterschiedlich sind, > sieht man schon daran, dass sich der Bristebot in Richtung der Drehache > des Motors bewegt, während der Kilobot sich senkrecht dazu bewegt. Deswegen fliegt der hier auch senkrecht nach oben. http://www.instructables.com/image/F0L4EN7GC4G8KNT/Bristle-Bot-20.jpg Das Prinzip ist das selbe. Aber ich lasse es mit diesem Post bewenden. Hat ja keinen Sinn.
Scheiss drauf. Es hat einen Sinn. Es tut mir leid, Tim. Ich glaube zwar nicht, dass Du richtig liegst, aber es tut mir leid. Schönen Abend noch.
Stefan us schrieb: > Das wüsste ich auch gerne mal. Könnte eine spaßige Bastelei werden - Ech coole Teile. Sogar die Anleitung ist dabei. Ich vermute das ist wie bei einem Raupenantrieb. Je nach dem welche Seite vibriert, macht der Robot nach links oder rechts. Also ich bin dabie bei der Bastelei ;-) Mich würde noch interessieren, geht das auch mit anderen Formen, muss das Gewicht ausgegleichen sein?
Hier gibt es noch einen einfacheren Roboter mit dem gleichen Antrieb: http://www.roborizeh.ir/ Auf das Paper dazu habe ich keinen Zugriff: http://www.tandfonline.com/doi/full/10.1080/01691864.2013.843788#tabModule Die Software für den "Rizeh" kann man auch downloader. Ist allerdings vergleichsweise einfach und in Bascom geschrieben...
Steffen schrieb: > Je nach dem welche Seite vibriert, macht der > Robot nach links oder rechts. Ja, genau so scheint es zu sein. Wobei noch die Drehrichtung des Vibrationsmotors wichtig ist, denn er liefert auch den Impuls zur Vorwärtsbewegung. Steffen schrieb: > Mich würde noch interessieren, geht das auch mit anderen Formen, muss > das Gewicht ausgegleichen sein? Wenn die Gewichtsverteilung nicht symmetrisch ist, hat der Roboter wahrscheinlich einen Drall. Das könnte man aber durch eine Regelschleife ausgleichen. Die Frage ist nur, welchen Sensor man nutzt, um festzustellen dass der Roboter sich in die gewünschte Richtung bewegt. Bei einem Line-Follower, wie oben, ist das ja relativ einfach.
Die Positionssensorik ist beim Kilobot übrigens äußerst genial gelost: Unter dem Bot befindet sich in der Mitte eine IR-LED und eine passende Photodiode. Die LED beleuchtet den Untergrund unter dem Roboter. Das Signal kann von benachbarten Bots empfangen werden. Über diesen Kanal können die Bots Informationen austauschen und sich gegenseitig identifizieren. Da die Intensität mit der Entfernung abnimmt, lasst sich aus der Signalstärke auch der Abstand bestimmen. Aus diesen Informationen können die Bots relative Positionen zueinander bestimmen und entsprechend navigieren.
Ahs so geht das. Genau danach wollte ich gerade fragen. Du bist mir zuvor gekommen.
Angehängte Dateien:
-

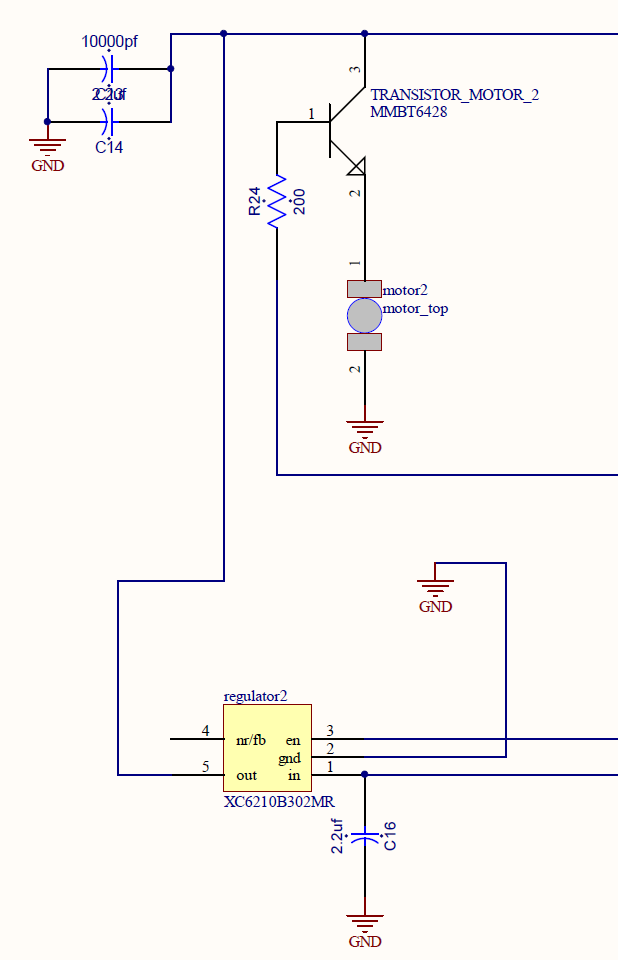
kilobot_motordriver.PNG
30 KB
{kind=link}
Bin gerade dabei, mir einen vereinfachten Kilobot zu designen. Komponenten: - MCU: Attiny841. Sollte genug I/O haben und hat im Gegensatz zu ATtiny85 und 84A bessere Peripherie zur Ansteuerung von Motoren und Sensoren. - Batterie: Erste idee war eine CR2032 zu nutzen. Leider reicht die max. discharge current nicht, um die Motoren zu betreiben. Bleibt also nur ein LiPo Akku - nervig. - Will versuchen, ein nRF24L01-Modul zur Fernsteuerung zu integrieren. - Lichtsensor? Habe da noch keine gute idee. Soll nur als Lichtfolger eingesetzt werden. Wo ich gerade festhänge, ist die Motorsteuerung. Im Original wird ein Bipolar-Transistor eingesetzt (Bild). Zusätlich gibt es für die Motoren einen eigenen Spannungsregler. Mir erscheint das alles zu kompliziert und zu ineffizient. Ich will daher einen low-Rdson NFET nutzen (IRLML2502) und die Motoren direkt an die Batterie hängen. Auch für den MCU würde ich gerne auf einen Spannungsregler verzichten. Ist das realistisch oder werden die Motoren das Spannungsnetz zerhacken? Wahrscheinlich benötige ich eine Induktivität zur entstörung?
:
Bearbeitet durch User
Tim schrieb: > Wo ich gerade festhänge, ist die Motorsteuerung. Im Original wird ein > Bipolar-Transistor eingesetzt (Bild). Zusätlich gibt es für die Motoren > einen eigenen Spannungsregler. Mir erscheint das alles zu kompliziert > und zu ineffizient. > > Ich will daher einen low-Rdson NFET nutzen (IRLML2502) und die Motoren > direkt an die Batterie hängen. Auch für den MCU würde ich gerne auf > einen Spannungsregler verzichten. Ist das realistisch oder werden die > Motoren das Spannungsnetz zerhacken? Wahrscheinlich benötige ich eine > Induktivität zur entstörung? naja wobei man mosfets nehmen kann. Wegen dem Spannungsregler kann ich mir auch nicht vorstellen was das soll, was mir da ausfällt, der wird über den MCU gesteuert (EN) Nicht das die mit n PWM Signal den Regler steuern und mit dem Transistor den Motor nur ein/aus schalten. Als Stromversorgung sind die Lipos schon gut, Ich nutze seit Jahren verschiedene Ausführungen. Derzeit kleine 250mAh Lipos, die können bis 20C belastet werden. Den MCU sollte man auf alle fälle mit Entstörung betreiben. Wird bei den Teilen auch so gemacht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.