Hallo Leute, ich hab hier ein Projekt bei dem ich gerne ein Teleskop seeeehr langsam drehen möchte, Stichwort "Nachführung". Als Low-Budget-Lösung einen kleinen Stepper von Max P. aus der Bastelkiste, ein Arduino und ein L293D. Das Ding macht schön seine 200 Voll- bzw 400 Halbschritte. Aber eben nur 1 Vollschritt alle 4 Sekunden. Eine kontinuierliche(re) Bewegung wäre besser. PWM für Mikroschritte kriegt man wohl in der Zeit mit 'nem Atmel irgendwie hin. Ein Servo wäre hier wohl besser, aber es soll Low-Budget sein und ich hab alle Teile schon hier rumliegen. Der Motor treibt eine Schnecke an. Frage an die Praktiker: Geht das überhaupt, einen Schrittmotor so langsam laufen zu lassen oder lauf ich da in Probleme rein die ich jetzt noch gar nicht sehe? Danke für eure Antworten Detlev
Wäre da ein (weiteres) Untersetzungsgetriebe nicht einfacher?
"Einfach" wäre der Kauf einer fertigen Nachführung. Es geht ja auch ums programmieren lernen. Detlev
@ Detlev S. (drahtbruecke) >Das Ding macht schön seine 200 Voll- bzw 400 Halbschritte. Aber eben nur >1 Vollschritt alle 4 Sekunden. Wieso? >PWM für Mikroschritte kriegt man wohl in der Zeit mit 'nem Atmel >irgendwie hin. Dann tu das, wenn gleich auch das seine Grenzen hat. >Ein Servo wäre hier wohl besser, aber es soll Low-Budget sein und ich >hab alle Teile schon hier rumliegen. Der Motor treibt eine Schnecke an. Wie groß ist die mechanische Übersetzung? Wieviele Vollschritte/h entsprechen 0,5U/h? >Frage an die Praktiker: Geht das überhaupt, einen Schrittmotor so >langsam laufen zu lassen oder lauf ich da in Probleme rein die ich jetzt >noch gar nicht sehe? Die Mikroschritte kann man nicht unendlich klein machen. Vielleicht kriegt man 256 Mikroschritte zwischen den Vollschritten hin, viel mehr aber eher nicht.
Detlev S. schrieb: > PWM für Mikroschritte kriegt man wohl in der Zeit mit 'nem Atmel > irgendwie hin. Damit die Schritte gleich groß sind, muss der Motor dafür optimiert sein. Nicht jeder Schrittmotor ist für Mikroschritt geeignet, wenn es drauf an kommt, dass die gleich groß sind. > Ein Servo wäre hier wohl besser, aber es soll Low-Budget sein und ich > hab alle Teile schon hier rumliegen. Der Motor treibt eine Schnecke an. > > Frage an die Praktiker: Geht das überhaupt, einen Schrittmotor so > langsam laufen zu lassen oder lauf ich da in Probleme rein die ich jetzt > noch gar nicht sehe? Tausende von Teleskopmontierungen laufen mit Schrittmotoren. Der Vorteil von Servomotoren ist, dass man damit höhere Schwenkgeschwindigkeiten erreichen kann, z.B. um Objekte schnell anzufahren oder um Satelliten zu verfolgen.
Wolfgang schrieb: > Tausende von Teleskopmontierungen laufen mit Schrittmotoren. klar, aber dann vermutlich mit der richtigen Getriebe.
Habe ein Elektrozylinder mit einem Schrittmotor aufgebaut, weil ich auch teilweise sehr kleine Abstufungen brauchte. Ich habe dazu eine fertige Endstufe mit einstellbaren Mikroschrittbetrieb verwendet und auf eine 12800er Teilung eingestellt. Damit lassen sich Bewegungen im 1/1000 mm Bereich zuverlässig steuern (Ist bei mir Kraftgesteuert), wobei 1U vom Schrittmotor 5 mm Bewegung entsprechen.
@Karl (Gast) >Endstufe mit einstellbaren Mikroschrittbetrieb verwendet und auf eine >12800er Teilung eingestellt. 12800 Mikroschritte / Umdrehung? Das wären bei einem klassischen 200 Vollschrittmotor 64 Mikroschritte/Vollschritt. Klingt plausibel.
Der Motor soll sich in 24Stunden 10x komplett drehen. Es ist ein Schrittmotor mit 200 Schritten. Das ergibt etwa 1 Schritt in 4 Sekunden oder 1/2 Schritt in 2 Sek
Peter II schrieb: > klar, aber dann vermutlich mit der richtigen Getriebe. Normalerweise wird ein dickes Schneckenrad als letzte Stufe verwendet. Das Getriebe davor darf gar nicht so doll untersetzen, weil der Schrittmotor sonst das Teleskop nicht mehr in erträglicher Zeit schwenken kann, um z.B. bei einer Deutschen Montierung zwischen Ost- und Westhimmel zu wechseln.
Falk B. schrieb: > Die Mikroschritte kann man nicht unendlich klein machen. Vielleicht > kriegt man 256 Mikroschritte zwischen den Vollschritten hin, viel mehr > aber eher nicht. Ja - aber warum, wenn man auch ein Getriebe einsetzen kann. Die "Präzision" der Mikroschritte ist - soweit mir bekannt - nicht unbedingt optimal. Z.B. http://www.phytron.de/antrieb/index.php?Set_ID=307&tl_id=29 Die schreiben ab 1/20, aber woanders habe ich gelesen, dass auch im unteren Bereich (bis 1/16) ca. 15 % Abweichung normal sind (finde aktuell die Quelle nicht). Da hier mit "Haltemomenten" gespielt wird ist das für mich nachvollziehbar - aber ich bin auch kein Techniker.
Hallo das geht wohl am besten mit zusätzlichen Unterstezungsgetriebe - zumindest alle käuflichen Nachführungen (auch nur die kleinen nackten Kameranachführungen) haben das so gelöst. Nur sind diese Getriebe, zumindest wenn für die Fotografie mit langen Brennweiten bzw. durch das Teleskop nicht einfach mal "so eben" aufgebaut da alles spielfrei sein muss und einen minimalen Gangfehler aufweisen darf. Die weiter Meachnik drum herum ist ab ein bestimmten Leistungsfähigkeit auch sehr anspruchsvoll. Für die rein optische Beobachtung bzw. kurze Brennweiten sieht das dann nicht mehr ganz so schlimm aus. Überigens: Eines der wenigen Gebiete wo eventuell ein Selbstbau auch finanziell einen Vorteil bieten könnte, selbst einfachste Nachführungen für eine kleine DSLR oder auch nur Kompaktkamera sind doch sehr teuer. Wahrscheinlich bist du mit deiner Frage in Astronomieforen besser aufgehoben, wenn es um elektrotechnische Details geht (Motortreiberauslegung, Detailfragen Stromversorgung, µC Programmierung...) kannst du ja immer noch hier nachfragen. Skypic
Willst du eine Nachführung für Fotografie oder nur verhindern, dass das angepeilte Objekt andauernd aus dem Blickfeld verschwindet? Eine Nachführung mit Synchronmotor wäre deutlich einfacher zu realisieren, sofern du kein Goto bauen willst.
@ Detlev S. (drahtbruecke) >Der Motor soll sich in 24Stunden 10x komplett drehen. Es ist ein >Schrittmotor mit 200 Schritten. Macht 2000 Schritte in 24h bzw 86400s > Das ergibt etwa 1 Schritt in 4 Sekunden >oder 1/2 Schritt in 2 Sek ??? Ich komme auf 2000 Schritte/86400s = 0,023 Schritte/s bzw. 1 Schritt/43,2s OK. Und da dir dieser Halbschritt in ~22s wahrscheinlich zu grob ist, musst du auf Mikroschritte gehen. Selbst mit moderaten 16 Mikroschritten/Vollschritt wäre das dann 1 Mikroschritt pro 2,7s. Bei 256 Mikroschritten wäre es ein Mikroschritt/168ms. Versuch es mal damit und wir sehen wie weit du kommst.
Skypic schrieb: > da alles spielfrei sein muss Hmm, wenn ich in eine Richtung justiert habe - und dann "weiterfahre" - sollte das "Getriebespiel" (aus meiner laienhaften Sicht) keine Rolle mehr spielen. Bei einer "Umkehr" taucht das Spiel natürlich wieder auf ...
Dieter F. schrieb: > Hmm, wenn ich in eine Richtung justiert habe - und dann "weiterfahre" - > sollte das "Getriebespiel" (aus meiner laienhaften Sicht) keine Rolle > mehr spielen. Bei der normalen Astrophotographie läuft der Motor für die Nachführung immer nur in ein Richtung, weil die Erde sich ziemlich konstant dreht. Für Korrekturen wird allenfalls die Schrittgeschwindigkeit verringert. Das Teleskop muss aber richtig ausbalanchiert sein, damit das Getriebe und die ganze Montierung immer ein leichtes Drehmoment in eine feste Richtung bekommt. Über welche Genauigkeiten/Brennweiten reden wir hier überhaupt. Unterhalb von 5" wird es meist interessant.
Blöde Handy-tipperei... 100 Umdrehungen, nicht 10.Sorry. So, Akku ist gleich alle.
Wolfgang schrieb: > Damit die Schritte gleich groß sind, muss der Motor dafür optimiert > sein. Nicht jeder Schrittmotor ist für Mikroschritt geeignet, wenn es > drauf an kommt, dass die gleich groß sind. Auch mit nicht für Mikroschritt optimierten Motoren lässt sich viel machen, besonders wenn man selber bastelt, dann kann man die Kurvenform der Ströme an den eigenen Motor anpassen, nicht nur an den Typ, sondern sogar an dieses Exemplar. 256 Mikroschritte pro Vollschritt sind durchaus machbar. Das man bei Schrittmotoren mit einer gewissen Abweichung von der Sollposition rechnen muß, ist prinzipbedingt, der Rotor richtet sich ja nur nach dem Magnetfeld aus, das ist halt etwas weich. Diese Abweichungen hat man aber auch bei Vollschritt (Hersteller geben da oft Werte von 5% .. 10% Vollschrittwinkel an). Hier geht es aber vorallem darum, den Lauf ruhiger zu machen, und das ist mit Mikroschritten machbar. Mit freundlichen Grüßen - Martin
>100 Umdrehungen, nicht 10.Sorry.
OK, dann passt es doch, man sollte mit 1/16 Mikroschritten auskommen.
Probieren geht über studieren. Schreib mal wie die Sache ausgeht.
Detlev S. schrieb: > Blöde Handy-tipperei... > 100 Umdrehungen, nicht 10.Sorry. Ok. Ein Schneckenrad mit 100 Zähnen klingt auch wesentlich glaubwürdiger als eines mit nur 10. ;-) Aber die Schnecke direkt mit dem Schrittmotor anzutreffen wirft zwei Probleme auf: 1. Ein Schritt entspricht 1'4,8" am Schneckenrad, und damit auch am Himmel. Das ist recht grob, da bist Du mit 30 Schritten einen Vollmonddurchmesser weiter... Auch Halb- oder Mikroschritte holen dich aus dieser Misere nicht wirklich raus. Das reicht vielleicht für Fotos mit 'nem Weitwinkel, aber ist für ein Teleskop viel zu ungenau, zumal der Motor seine Schritte ja nicht ruckfrei macht! 2. Das benötigte Drehmoment an der Schnecke wird einen "dicken" Schrittmotor erfordern, wenn nicht eine weitere Untersetzung dazwischen liegt. Gruß, Thorsten Edit: ein entscheidendes "nicht" ergänzt
:
Bearbeitet durch User
Thorsten S. schrieb: > Das ist recht grob, da bist Du mit 30 Schritten einen > Vollmonddurchmesser weiter... [...] Das reicht vielleicht > für Fotos mit 'nem Weitwinkel, Wenn man 30 µm Abweichung toleriert, darf man maximal ein 100mm-Objektiv verwenden, dann ist Schluss. > [...] zumal der Motor seine Schritte ja nicht > ruckfrei macht! Reine Frage der Ansteuerung. Das Problem rührt daher, dass ein Antrieb, der ursprünglich für reine Positionieraufgaben ("Punktsteuerung") vorgesehen war, unbedingt für Bahnsteuerungen verwendet werden muss. Irgendwer - die Elektronik-Entwickler? die Marketing-Fritzen? - bekommt es intellektuell nicht auf die Reihe, einen Schrittmotor einfach als Synchronmotor mit hoher Polpaarzahl aufzufassen. Die Schrittmotor-Endstufe würde dann einfach zu einem Umrichter, der frequenzvariablen Vier-Phasen-Drehstrom liefert, und das ganze Drama mit Vibrationen und Mikroschritten löst sich in Luft auf. An der beschränkten (Positionier-)Genauigkeit der Mikroschritte ändert sich natürlich nichts. > 2. Das benötigte Drehmoment an der Schnecke wird einen > "dicken" Schrittmotor erfordern, wenn nicht eine weitere > Untersetzung dazwischen liegt. Naja. 0.5 Nm ist für einen Schrittmotor nicht so besonders viel. Trotzdem wirken am Umfang einer Schnecke mit z.B. 5 mm Radius schon 100 N.
@ Possetitjel (Gast) >Irgendwer - die Elektronik-Entwickler? die Marketing-Fritzen? - >bekommt es intellektuell nicht auf die Reihe, einen Schrittmotor >einfach als Synchronmotor mit hoher Polpaarzahl aufzufassen. Das ist ja quasi Mikroschrittbetrieb.
Martin S. schrieb: > (Hersteller > geben da oft Werte von 5% .. 10% Vollschrittwinkel an). Werden die genauer, je öfter man die "bespricht"? Vielleicht kann man mit Kerzen etc. noch nachschärfen :-)
Martin S. schrieb: > Diese Abweichungen hat man aber auch bei Vollschritt (Hersteller > geben da oft Werte von 5% .. 10% Vollschrittwinkel an). Das ist aber ein symmetrischer Fehler. Nach einer Umdrehung summieren sich die Fehler zu Null auf. Ich halte die Wahrscheinlichkeit, dass man für die Aufgabe mit Mikroschrittbetrieb ein brauchbares Ergebnis bekommt. Bei 24h Betrieb muss man wahrscheinlich aber auch darauf achten, dass man eine ausreichend genaue Taktquelle hat.
Karl schrieb: > Nach einer Umdrehung summieren > sich die Fehler zu Null auf Ja, das hilft natürlich. Was zwischendurch passiert (Verschiebungen) ist halt Pech. Ein verwackeltes Bild kann durchaus künstlerisch interessant sein.
@ Karl (Gast) >> Diese Abweichungen hat man aber auch bei Vollschritt (Hersteller >> geben da oft Werte von 5% .. 10% Vollschrittwinkel an). >Das ist aber ein symmetrischer Fehler. Nach einer Umdrehung summieren >sich die Fehler zu Null auf. Das ist nicht das Thema, sondern der mechanische Jitter, der durch die Abweichungen der 200 Schrittpositionen von den idealen Positionen entsteht. Das Teleskop "eiert" vor und zurück, anstatt ideal gleichmäßig zu drehen.
Karl schrieb: > Ich halte die Wahrscheinlichkeit, Hast Du das mal überprüft? Wenn sogar die Hersteller das Gegenteil ausweisen scheint mir das weit hergeholt ...
Dieter F. schrieb: > Wenn sogar die Hersteller das Gegenteil > ausweisen scheint mir das weit hergeholt ... Welcher Hersteller weist was aus? Weißt du welche abs. Genauigkeit der TO braucht?
Zugegeben, ich habe nicht jeden Beitrag, bis zum letzten Komma analysiert, aber ich verstehe so einiges nicht. So z.B.: Warum soll ein Schrittmotor nicht jede beliebige Schrittanzahl (Schrittgeschwindigkeit) haben können. Zugegeben nach oben hin gibt es Grenzen, aber ein Schritt pro Jahr, oder weniger, sollte kein Problem sein. Mikroschritte sind in meinen Augen "Krücken". Die Leistung fällt dabei ins Bodenlose. Schaut euch dabei doch mal die Verhältnisse bei Schritt 7 nach 8 an, einer "ganz normalen" Situation, im 16-tel Schrittmodus. Da muss die Last besser als supersauber gleiten. Ich würde die Überlegung anhand eines Schrittes angehen. Also kann ich mit der damit generierten Bewegung leben, oder ist diese zu groß? Dies sollte, vor allem, in die Überlegung: Getriebe oder Ja, eingehen. Da uns der TO mit so Dingen, wie der beteiligten Massen, verschont hat ist natürlich eine Betrachtung zur Motorleistung ausgeschlossen. Als "Gelegenheitsknipser" weis ich aber: Optik ist nicht nur teuer. Aus meiner Studienzeit weiß ich noch: Massen zu beschleunigen ist ebenfalls teuer. Etwas, das wohl immer noch Gültigkeit hat. Ein Aspekt, der direkt in die Überlegung zur Motorleistung, oder deren Fehlen, eingeht. Natürlich kann ich mit dem entsprechenden Getriebe aus fast nix 'ne große Kraft generieren, aber wenn z.B. der Mond eine höhere "Verstellgeschwindigkeit" erreicht als meine Linse, dann ist an der falschen Stelle gespart worden. Da aber wiederum Motor und Getriebe direkt in die spätere Konstruktion eingehen und diese dann auch, nachträglich, kaum geändert werden kann...
Karl schrieb: > Welcher Hersteller weist was aus? Weißt du welche abs. Genauigkeit der > TO braucht? Beitrag "Re: Atmel/Arduino; Schrittmotor langsam laufen lassen (0,5U/h) für Teleskop" gelesen? Ganz unten (Mikroschrittbetrieb vs. Auflösung:) ...
Amateur schrieb: > Schaut euch dabei doch mal die Verhältnisse bei Schritt 7 > nach 8 an Kannst Du das bitte mal anschaulich darstellen?
@Amateur (Gast) >Warum soll ein Schrittmotor nicht jede beliebige Schrittanzahl >(Schrittgeschwindigkeit) haben können. Man kann nicht beliebig fein auflösen. Man kann zwar sehr langsam die Schritte durchfahren, aber ein Schritt ist dann immer noch ein "harter" Schritt. Ist er zu groß, sieht man ein Ruckeln. >Aus meiner Studienzeit weiß ich noch: Massen zu beschleunigen ist >ebenfalls teuer. Je langsamer man dreht umso weniger wird aber beschleunigt.
Amateur schrieb: > Mikroschritte sind in meinen Augen "Krücken". Die Leistung fällt dabei > ins Bodenlose. Schaut euch dabei doch mal die Verhältnisse bei Schritt > 7 nach 8 an, einer "ganz normalen" Situation, im 16-tel Schrittmodus. > Da muss die Last besser als supersauber gleiten. Mikroschritte sind Stand der Technik. Wenn die Kraft zwischen Schritt 7 und 8 nicht reicht, wird es spätestens im nächsten Vollschritt aufgehohlt. Mann muss halt einen ausreichend großen Motor nehmen, steht auch im von Dieter F zitierten Artikel. Fakt ist, dass der Mikroschrittbetrieb den Lauf ruhiger macht. Dieter F. schrieb: > gelesen? Ganz unten (Mikroschrittbetrieb vs. Auflösung:) ... Das steht aber nix dazu ob nun ein Schrittmotor zur Nachführung von einem Teleskop geeignet ist oder nicht. Spätestens, wenn man den Schrittmotor mit einem hochauflösenden Winkelsensor ausstattet kann man im Mikroschrittbetrieb auch die gewünschte Position erreichen, steht auch in dem Artikel.
>Man kann nicht beliebig fein auflösen. Man kann zwar sehr langsam die >Schritte durchfahren, aber ein Schritt ist dann immer noch ein "harter" >Schritt. Ist er zu groß, sieht man ein Ruckeln. Vielleicht habe ich mich etwas missverständlich ausgedrückt. Zum "weicheren" Fahren habe ich nichts gegen - sinnvoll unterteilte - Hilfs- bzw. Mikroschritte. Wohl aber gegen die genaue Positionierung auf Position 3835+8/16. >Je langsamer man dreht umso weniger wird aber beschleunigt. Man sollte die Betriebsarten: Nachführen und Positionieren strikt auseinanderhalten aber nicht vergessen, dass beide "normal" sind.
@ Amateur (Gast) >Vielleicht habe ich mich etwas missverständlich ausgedrückt. Zum >"weicheren" Fahren habe ich nichts gegen - sinnvoll unterteilte - Hilfs- >bzw. Mikroschritte. OK > Wohl aber gegen die genaue Positionierung auf >Position 3835+8/16. Das ist hier nicht gefragt. >Man sollte die Betriebsarten: Nachführen und Positionieren strikt >auseinanderhalten aber nicht vergessen, dass beide "normal" sind. Ja, aber im wesentlichen geht es hier um Nachführen.
Falk B. schrieb: >>Warum soll ein Schrittmotor nicht jede beliebige Schrittanzahl >>(Schrittgeschwindigkeit) haben können. > > Man kann nicht beliebig fein auflösen. Man kann zwar sehr > langsam die Schritte durchfahren, aber ein Schritt ist dann > immer noch ein "harter" Schritt. Genau hier zeigt sich der Quatsch, den ich oben angeprangert habe: Warum "macht" der Schrittmotor einen "Schritt"? Antwort: Weil ihn die Endstufe nur schrittweise ansteuert ! Wenn ich einen normalen Synchronmotor mit genauso saumäßig verzerrtem 4-Phasen-Drehstrom ansteuere, wie man das mit Schrittmotoren macht, dann "macht" der Synchronmotor auch nur "Schritte"! Die ganze Schrittmacherei ist gar keine Eigenheit des Motors , sondern der Ansteuerung ! Derselbe Unsinn mit dem "Mikroschrittbetrieb": Der Mikroschritt- betrieb ermöglicht nicht primär eine bessere Positionierung, sondern eine Bewegung mit weniger Vibrationen. Der korrekte Name dafür ist "Bahn-Interpolator"!
Amateur schrieb: > Man sollte die Betriebsarten: Nachführen und Positionieren > strikt auseinanderhalten aber nicht vergessen, dass beide > "normal" sind. Ja, sollte man. Die Automatisierungstechnik kennt dafür sogar passende Begriffe: Punktsteuerung und Bahnsteuerung. Beide Betriebsarten sind gewissermaßen komplementär zueinander. Bei der Bahnsteuerung ("Nachführung") wünscht man sich eine möglichst stetige Bewegung ohne erzwungene Ruhepausen; die Positionen sind nur Hilfsmittel zur Bahnbeschreibung (CNC-Fräse, 3D-Drucker etc.) Demgegenüber sind bei der Punktsteuerung ("Positionierung") die Ruhephasen, d.h. das Verharren an festgelegten Positionen gerade das Ziel der ganzen Aktion - die Bewegungen zwischen den Positionen ist nur ein notwendiges Übel (Punktschweissen, Bohren, Leiterplatten bestücken).
Possetitjel schrieb: > Die ganze Schrittmacherei ist gar keine Eigenheit des Motors , > sondern der Ansteuerung ! Darum drehen sich Schrittmotorachsen auch so leicht, wenn man die Ansteuerung wegläßt? Bei mir leider nicht, da muß ich wohl nachölen.
Algu schrieb: > Willst du eine Nachführung für Fotografie oder nur verhindern, dass das > angepeilte Objekt andauernd aus dem Blickfeld verschwindet? > Eine Nachführung mit Synchronmotor wäre deutlich einfacher zu > realisieren, sofern du kein Goto bauen willst. Low-Budget-Goto? Ich dachte das nennt sich "Karkoschka" und hat abwischbare Seiten ;-) Für's erste mal nur visuell beobachten aber Foto wäre vielleicht ein Versuch wert. Eine modifizierte Webcam hätte ich, die macht eh nur VGA-Auflösung und kann nur max 0,2s belichten (Quickcam 3000). Mal nachrechnen was dann passieren würde... Das Teleskop hat 300mm Brennweite bei 76mm Spiegeldurchmesser. Der Mond passt gerade ins Bild, also "sieht" die Kamera etwa 0,5° Feld. 1 Pixel wäre dann 0,5°/480 Pixel = 0,001° breit. Die Zeit um 1 Pixel weit zu wandern wäre 1 Tag/(360°/0,001°) = 0,25 sek. Momentan steht der Motor 2 Sekunden am Stück, also wandert alles 8 Pixel weit bevor nachgeregelt wird. Jede Bewegung die nur halbwegs in die richtige Richtung geht dürfte diese Situation verbessern. Wenn das Ding visuell was bringt ist ja schon was gewonnen und wenn es fotografisch nichts bringt ist nicht viel verloren. Ich frag mich momentan nur ob der Motor stark genug ist. Es ist der hier: http://www.pollin.de/shop/downloads/D310455D.PDF Ich pack ihn mal an die Achse meiner EQ-1-Montierung und probier es aus.
m.n. schrieb: > Possetitjel schrieb: >> Die ganze Schrittmacherei ist gar keine Eigenheit des >> Motors, sondern der Ansteuerung! > > Darum drehen sich Schrittmotorachsen auch so leicht, wenn > man die Ansteuerung wegläßt? > Bei mir leider nicht, da muß ich wohl nachölen. Ich würde Deinem Verständnis gern weiterhelfen. Leider enthält allein die eine rhetorische Frage, die Du gestellt hast, drei sachliche bzw. logische Fehler. Ich sehe daher im Moment keine Möglichkeit, Dir irgendwie weiterzuhelfen.
Detlev S. schrieb: > Momentan steht der Motor 2 Sekunden am Stück, also wandert > alles 8 Pixel weit bevor nachgeregelt wird. Moment... das verstehe ich noch nicht ganz. Ich rechne mal rückwärts: Ein Tag hat rund 80'000 Sekunden. Alle 2 Sekunden ein Schritt gibt 40'000 Schritte für einen Vollkreis. Wie ich verstanden habe, hat Dein Getriebe eine Untersetzung von 1:100 (stimmt das?). Somit müsste der Motor 100 Umdrehungen mit jeweils 400 Schritten machen, damit sich das Fernrohr einmal ganz herum dreht. > Jede Bewegung die nur halbwegs in die richtige Richtung > geht dürfte diese Situation verbessern. Nun ja; der von Dir unten verlinkte Motor hat 400 Vollschritte je Umdrehung (=0.9° Schrittwinkel). Halbschrittbetrieb sollte aber kein Problem sein; Du kannst also jede Sekunde einen Halbschritt machen und hast den Fehler halbiert (4 Pixel). Das muss auf jeden Fall gehen. Mit noch feineren Schritten ("Mikroschrittbetrieb") zu experimentieren lohnt sich in jedem Falle; es geht ja nicht um extreme Positioniergenauigkeit (die nicht erreicht wird), sondern um "Bahn-Interpolation", d.h. um gleichmäßige Bewegung. Da hätte ich wenig Hemmung, das zu probieren. > Ich frag mich momentan nur ob der Motor stark genug ist. Es > ist der hier: > http://www.pollin.de/shop/downloads/D310455D.PDF Der Motor wird bei ganz langsamen Geschwindigkeiten irgendwo bei 50 N*cm herauskommen, das sind 0.5 Nm oder 500 mNm. Am Umfang einer Schnecke mit z.B. 5 mm Radius wirken folglich 100 N. Das entspricht der Gewichtskraft einer Masse von 10 kg. Sofern die Schnecke nicht angebremst ist, sollte das meiner Meinung nach genügen. Achtung! Auf der Abtriebsseite wirkt ein wesentlich größeres Drehmoment! (Theoretisch 50 Nm, praktisch vielleicht 30 Nm.) > Ich pack ihn mal an die Achse meiner EQ-1-Montierung und > probier es aus. Probiere es und berichte. :) Viel Erfolg.
Possetitjel schrieb: > Irgendwer - die Elektronik-Entwickler? die Marketing-Fritzen? - > bekommt es intellektuell nicht auf die Reihe, einen Schrittmotor > einfach als Synchronmotor mit hoher Polpaarzahl aufzufassen. > > Die Schrittmotor-Endstufe würde dann einfach zu einem Umrichter, > der frequenzvariablen Vier-Phasen-Drehstrom liefert, und das > ganze Drama mit Vibrationen und Mikroschritten löst sich in > Luft auf. DU hast es nicht verstanden. Ein Frequenzumrichter ist nichts anderes als ein Mikroschritttreiber.
Tip: Für Nachführungen eignen sich simple, billige Uhrwerke ganz gut. U.U. insbesondere, wenn sie für ein 24-Stunden-Ziffernblatt gemacht sind.
Wolfgang schrieb: > DU hast es nicht verstanden. Das glaube ich nicht, Tim. > Ein Frequenzumrichter ist nichts anderes als ein > Mikroschritttreiber. Eben. Da beides im Kern identisch ist, ist einer der Begriffe überflüssig. Am "Mikroschritttreiber" ist - verglichen mit klassischen Frequenzumrichtern - nichts so neu oder andersartig, dass es ein eigenes Wort dafür brauchen würde.
Possetitjel schrieb: > Am "Mikroschritttreiber" ist - verglichen > mit klassischen Frequenzumrichtern - nichts so neu oder > andersartig, dass es ein eigenes Wort dafür brauchen würde. Das liegt wohl ein bisschen an dem Kontext. In verschiedenen Arbeitsbereichen gibt es nun mal verschiedene Begriffe für das selben Ding. In der Evolutionsbiologie nennt man das wohl konvergente Entwicklung. Die FUs haben sich als Geschwindigkeitsregelung für Synchronmotoren entwickelt, i.e. einer Geschwindigkeitssteuerung, die Mikroschritttreiber aus der Verfeinerung eines Schrittmotorrechteckantriebs, i.e. einer Positionsregelung.
Possetitjel schrieb: > Da beides im Kern identisch ist, ist einer der Begriffe > überflüssig. Am "Mikroschritttreiber" ist - verglichen > mit klassischen Frequenzumrichtern - nichts so neu oder > andersartig, dass es ein eigenes Wort dafür brauchen würde. Am auto ist im Vergleich zur Kutsche auch nichts neues, vier Räder, zwei davon Lenkbar, trotzdem heißt es heute nicht mehr Motorkutsche. Eine Schrittmotorsteuerung unterscheidet sich von einem FU schon darin, dass der eine mit Gleichstrom und der andere mit Wechselstrom versorgt wird. Von daher erübrigt sich für ersteres schon der Begriff FU.
Md M. schrieb: > Tip: Für Nachführungen eignen sich simple, billige Uhrwerke ganz gut. > U.U. insbesondere, wenn sie für ein 24-Stunden-Ziffernblatt gemacht > sind. Eine "Eieruhr-Barndoor" steht auch auf meiner ToDo-Liste!
Possetitjel schrieb: > Detlev S. schrieb: > >> Momentan steht der Motor 2 Sekunden am Stück, also wandert >> alles 8 Pixel weit bevor nachgeregelt wird. > > Moment... das verstehe ich noch nicht ganz. Ich rechne mal > rückwärts: Ein Tag hat rund 80'000 Sekunden. > > Alle 2 Sekunden ein Schritt gibt 40'000 Schritte für einen > Vollkreis. > > Wie ich verstanden habe, hat Dein Getriebe eine Untersetzung > von 1:100 (stimmt das?). Somit müsste der Motor 100 Umdrehungen > mit jeweils 400 Schritten machen, damit sich das Fernrohr > einmal ganz herum dreht. Ja, 100 Umdrehungen des Motors entsprechen einer Nachführung für einen ganzen Tag. > >> Jede Bewegung die nur halbwegs in die richtige Richtung >> geht dürfte diese Situation verbessern. > > Nun ja; der von Dir unten verlinkte Motor hat 400 *Vollschritte* > je Umdrehung (=0.9° Schrittwinkel). Halbschrittbetrieb sollte Da bin ich auch erst drauf reingefallen. Die schlauen Jungs haben Halbschrittbetrieb für das Diagramm gewählt. Dieser Motor macht wie viele andere seine Art "nur" 200 Vollschritte. [...] >> Ich pack ihn mal an die Achse meiner EQ-1-Montierung und >> probier es aus. > > Probiere es und berichte. :) Aye Sir! > Viel Erfolg. Danke!
Possetitjel schrieb: > Wenn man 30 µm Abweichung toleriert, darf man maximal ein > 100mm-Objektiv verwenden, dann ist Schluss. Ja, aber das ist die reine Hochrechnung der Schrittweite bei idealer Ausführung ohne jegliche Schwingungseffekte usw. Und wenn man bedenkt, daß heutige DSLRs Pixelgrößen zwischen 8µm bis unter 4µm haben, ist das schon eine Menge. > Das Problem rührt daher, dass ein Antrieb, der ursprünglich > für reine Positionieraufgaben ("Punktsteuerung") vorgesehen > war, unbedingt für Bahnsteuerungen verwendet werden muss. Soweit stimme ich Dir zu, keine Frage. > Irgendwer - die Elektronik-Entwickler? die Marketing-Fritzen? - > bekommt es intellektuell nicht auf die Reihe, einen Schrittmotor > einfach als Synchronmotor mit hoher Polpaarzahl aufzufassen. Das trifft aber so nur für einen reinen Reluktanzmotor zu, bei dem der Rotor ohne Stromfluß völlig frei dreht. Die üblicherweise verwendeten Schrittmotoren sind aber Hybridmotoren mit einem starken Permanentmagneten im Rotor und daher nicht zu vernachlässigendem magnetischen Rastmoment, auch im stromlosen Zustand. > Die Schrittmotor-Endstufe würde dann einfach zu einem Umrichter, > der frequenzvariablen Vier-Phasen-Drehstrom liefert, und das > ganze Drama mit Vibrationen und Mikroschritten löst sich in > Luft auf. Dann braucht man aber einen reinen Reluktanzmotor... Bei einem gewöhnlichen (Hybrid-) Schrittmotor hat man auch bei rein analoger Ansteuerung mit sinusförmigem Drehstrom kein konstantes Antriebs-Drehmoment. Mit zunehmender Drehzahl kompensiert natürlich die Massenträgheit des Rotors diesen Effekt, aber hier geht es ja gerade um die langsame Bewegung. Eine Mikroschritt-Ansteuerung mit hinreichend vielen Schritten macht doch letztlich genau das gleiche wie Dein Frequenzumrichter. > Naja. 0.5 Nm ist für einen Schrittmotor nicht so besonders > viel. Trotzdem wirken am Umfang einer Schnecke mit z.B. > 5 mm Radius schon 100 N. Der vom TO gewählte Motor hat rund 10 Prozent davon.
:
Bearbeitet durch User
Thorsten S. schrieb: > Ja, aber das ist die reine Hochrechnung der Schrittweite bei idealer > Ausführung ohne jegliche Schwingungseffekte usw. > Und wenn man bedenkt, daß heutige DSLRs Pixelgrößen zwischen 8µm bis > unter 4µm haben, ist das schon eine Menge. Das Begrenzende ist bei längeren Brennweiten nicht die Pixelgröße der Kamera, sondern die Luftunruhe. Damit ein Stern durch Nachführfehler nicht länglich erscheint, müssen diese im Vergleich zur Verschmierung durch die Luftunruhe ausreichend klein sein.
Possetitjel schrieb: > Detlev S. schrieb: >> Ich frag mich momentan nur ob der Motor stark genug ist. Es >> ist der hier: >> http://www.pollin.de/shop/downloads/D310455D.PDF > > Der Motor wird bei ganz langsamen Geschwindigkeiten > irgendwo bei 50 N*cm herauskommen, das sind 0.5 Nm oder > 500 mNm. Da musst Du aber bitte mal erklären, wie Du auf diese Werte kommst. Laut Datenblatt hat der Motor ein Haltemoment von 6,5 Ncm, das Drehmoment bei ganz langsamer Geschwindigkeit kann nach meinem Verständnis also nicht größer sein, schon gar nicht fast acht-fach.
Wolfgang schrieb: > Das Begrenzende ist bei längeren Brennweiten nicht die Pixelgröße der > Kamera, sondern die Luftunruhe. Damit ein Stern durch Nachführfehler > nicht länglich erscheint, müssen diese im Vergleich zur Verschmierung > durch die Luftunruhe ausreichend klein sein. Das ist mir völlig klar, ich mache selbst Astrofotos... Aber wenn das Seeing so abartig schlecht ist, daß es schon bei 100mm Brennweite sichtbar wird, packe ich die Kamera gar nicht erst aus... ;-) Mal kurz nachgerechnet: (Beugungsverluste durch die Öffnung vernachlässigt) 5µm Pixelgröße an 100mm Brennweite entspricht einer Auflösung von 10,3 Bogensekunden pro Pixel. Die vorher berechnete Schrittweite (entsprach ca. 30µm in der Bildebene bei 100mm Brennweite) ist aber schon größer als eine Bogenminute. Das durchschnittliche Seeing liegt so bei 2" im Flachland, in Städten meist schlechter, so 3" bis 4". Davon merkt man also noch nichts bei 100mm. Ich bleibe also bei meiner Aussage, daß eine derartige Nachführung fotografisch nur mit Weitwinkeloptik sinnvoll verwendbar ist.
Detlev S. schrieb: > Mal nachrechnen was dann passieren würde... > Das Teleskop hat 300mm Brennweite bei 76mm Spiegeldurchmesser. Der Mond > passt gerade ins Bild, also "sieht" die Kamera etwa 0,5° Feld. 1 Pixel > wäre dann 0,5°/480 Pixel = 0,001° breit. > Die Zeit um 1 Pixel weit zu wandern wäre 1 Tag/(360°/0,001°) = 0,25 sek. > > Momentan steht der Motor 2 Sekunden am Stück, also wandert alles 8 Pixel > weit bevor nachgeregelt wird. Jede Bewegung die nur halbwegs in die > richtige Richtung geht dürfte diese Situation verbessern. Hi, das ist mal eine vernünftige Betrachtung und deutlich hilfreicher als die Diskussion um die Begriffe. Wenn ich es richtig verstehe, ist Mikroschrittbetrieb nur eine Krücke. Nimmt man die 10% Ungenauigkeit, ist bei 1/8 Schritten doch schon fast Ende der Fahnenstange, weil 1/8 12,5% entsprechen und somit z.B. 4/8 auch nahe 3/8 oder 5/8 sein könnten. Ok, sofern die 10% auf den Vollschritt bezogen sind. Also würde ich erstmal den Schrittmotor soweit wie erträglich untersetzen. (So zumindest meine erste Idee aber das löst das Problem auch nicht) Wieviel Spiel das Getriebe hat ist für eine Nachführung in eine Richtung ja egal, solange die Last immer in eine Richtung bleibt. Zur Not muß man das eben vorspannen. Die Genauigkeit hängt dann eigentlich nur vom Rundlauf der Zahnräder vor allem der ausgangsstufe ab. Nehmen wir mal obiges Zahlenbeispiel, wäre eine Genauigkeit von 1 Pixel also 0,001° anzustreben. Bei einem Zahnrad der letzten Stufe mit 120Z müsste die Teilung auf 0,03% "Gleichlauf" haben bzw. bei Modul 1 im Bereich von 1µm an den Flanken genau sein. Egal ob Mikroschritte und weniger untersetzt oder hoch untersetzt, das ist auch mit fortgeschrittenen Bastlermitteln utopisch. Alleine der Rundlauf des Zahnrades auf der Achse ist unter 1/100mm schon sehr sportlich. Vermutlich ist eine Kombination von Untersetzung un Mikroschritten am ehesten machbar. Was noch gar nicht angesprochen wurde ist die Ausrichtung der Drehachse. Passt die nicht absolut genau, haut das ja nach oben oder unten ab. Das halte ich für das viel größere Problem. 0,001° Abweichung wären wieder ein Pixel, spätestens da würde ich aufgeben. Oder wie wird das normalerweise gemacht wenn man so lange nachführen will? Ausser aktiv das Bild auswerten, was ja mit einem einfachen µC nicht ganz banal ist... Gruß, Norbert
Norbert S. schrieb: > Oder wie wird das normalerweise gemacht wenn man so lange nachführen > will? > Ausser aktiv das Bild auswerten, was ja mit einem einfachen µC nicht > ganz banal ist... Normalerweise teilt man diese Funktionalitäten auf: Die Nachführung wird von einem Controller übernommen, der die Montierung freilaufend steuert. Außer bei GoTo-Steuerungen, wo man eine Kalibrierung an 2 oder 3 bekannten Sternpositionen vornimmt, "weiss" der Controller nichts von der Ausrichtung der Montierung und ihrer Achsen. Er steuert also nur quarzgenau den Motor der Stundenachse (Rektaszensionsachse) an, um die Erddrehung auszugleichen. Die exakte Ausrichtung dieser Achse auf den Himmelspol ist dafür zwingend erforderlich. Erreicht wird dies durch sukzessive Korrekturen an Nordausrichtung und Achsneigung (der geogr. Breite entsprechend) während des Beobachtens von Sternen, abhängig davon, wie diese sich trotz Nachführung im Teleskop bewegen. Das Verfahren nennt sich Einscheinern. Gewisse Abweichungen kann man zulassen, wenn man auch an der Deklinationsachse einen Motor hat, der vom Controller angesteuert werden kann. Eine unabhängige Guiding-Hardware ermittelt mittels einer Kamera die Positionsabweichungen eines Leitsterns und regelt diese aus, indem sie entsprechende Korrekturbefehle an den Controller der Motorsteuerung sendet. Der Nachführfehler aufgrund nicht perfekter Ausrichtung der Stundenachse verschwindet so zwar nicht, wird aber in einen wesentlich weniger störenden umgewandelt: Von einer Verschiebung aller Sterne in eine Rotation um den Leitstern. Fürs Guiding wird oft ein Notebook mit entsprechender Software und einer relativ simplen Astrokamera mit kleinem Chip verwendet, es gibt aber auch standalone-Guider, die ohne PC auskommen und einen schnellen uC enthalten.
Hi, Danke für die Erläuterungen. Also eher kein Projekt für mal eben Sa. Nachmittag ;-) So ähnlich habe ich mir das auch vorgestellt. Gruß, Norbert
Norbert S. schrieb: > Also eher kein Projekt für mal eben Sa. Nachmittag ;-) LOL! Nein, ganz sicher nicht. Nach oben sind der Komplexität auch kaum Grenzen gesetzt: Wenn man zwei motorgesteuerte Achsen hat, kann man auch weitergehende Korrekturen anbringen und eine GoTo-Steuerung programmieren. z.B. ein Alignment an 3 bekannten Sternpositionen und anschließende Transformation der Himmelskoordinaten in das Koordinatensystem der (nicht perfekt ausgerichteten) Montierungsachsen. Wie beim Guiding werden dann die Objekte zwar Zentriert und korrekt nachgeführt, aber es bleibt eine Rest-Rotation um das anvisierte Objekt bei ungenauer Ausrichtung. Oder einen Ausgleich der atmosphärischen Refraktion (abhängig von der Zenitdistanz des beobachteten Objektes) zusätzlich lassen sich noch mechanische Fehler des Antriebs ausgleichen wie z.B. der periodische Schneckenfehler (der bewirkt ein sinusförmiges Pendeln der Istposition eimal mit jeder Umdrehung der Schnecke). Den höchsten Grad an Korrekturen erreicht man, wenn man mit Hilfe von möglichst vielen Referenzobjekten an verschiedenen Positionen des Himmels ein sogenanntes Pointingfile erstellt, damit lassen sich dann sogar Fehler in der Rechtwinkligkeit der Achsen zueinander, Durchbiegung des Teleskoptubus und Lageabhängige Verschiebungen des Spiegels in seiner Lagerung korrigieren. Wie schon gesagt, nach oben hin gibts kaum Grenzen an Komplexität, aber für eine einfache Nachführung für erste Versuche reicht sicher eine gesteuerte Achse.
Detlev S. schrieb: >> Nun ja; der von Dir unten verlinkte Motor hat 400 Vollschritte >> je Umdrehung (=0.9° Schrittwinkel). Halbschrittbetrieb sollte > > Da bin ich auch erst drauf reingefallen. Thorsten S. schrieb: >> Der Motor wird bei ganz langsamen Geschwindigkeiten >> irgendwo bei 50 N*cm herauskommen, das sind 0.5 Nm oder >> 500 mNm. > > Da musst Du aber bitte mal erklären, wie Du auf diese Werte > kommst. Mea culpa. Mea maxima culpa. Ich habe ins falsche Datenblatt geguckt; meine Rechnungen sind Schwachsinn. Tut mir leid. War wohl schon deutlich zu spät gestern.
Vielen Dank für die lebhafte Diskussion und die vielen Anregungen. Jetzt ist der Ball wieder bei mir. Ich werde erst einmal prüfen ob der Motor im Halbschrittbetrieb stark genug ist das Teleskop nachzuführen. Dazu ist erst einmal etwas Mechanik zu basteln. Erst wenn das gut funktioniert lohnt es sich Mikroschrittbetrieb zu implementieren. Vielleicht muß ich ja doch ein Getriebe dazwischen setzen. (Wo kauft man sowas eigentlich?) Detlev
Detlev S. schrieb: > Jetzt ist der Ball wieder bei mir. Ich werde erst einmal prüfen ob der > Motor im Halbschrittbetrieb stark genug ist das Teleskop nachzuführen. Für die Kraft des Motors ist es egal, ob er im Voll-, Halb- oder sonstwie Schrittbetrieb läuft, solange der Strom durch den Treiber vernünftig geregelt wird. Der Motor läuft nur ruhiger. Hier eine Animation mit Angaben zum Strom http://de.nanotec.com/support/tutorials/schrittmotor-und-bldc-motoren-animation/ Das Teleskop sollte mit den Gegengewichten so ausbalanciert sein, dass es ganz minimal nach Westen kippt. Bei idealer Einstellung hat der RA-Motor fast gar nichts zu. In der Deklination muss das Teleskop in seinen Schellen so hingeschoben sein, dass es auch auf die Dec-Achse fast kein Drehmoment erzeugt.
>Das Teleskop sollte mit den Gegengewichten so ausbalanciert sein, dass >es ganz minimal nach Westen kippt. Bei idealer Einstellung hat der >RA-Motor fast gar nichts zu. In der Deklination muss das Teleskop in >seinen Schellen so hingeschoben sein, dass es auch auf die Dec-Achse >fast kein Drehmoment erzeugt. Wird bei diesem Ansatz die Gesamtmasse nicht zum Spielverderber?
Wolfgang schrieb: > Detlev S. schrieb: >> Jetzt ist der Ball wieder bei mir. Ich werde erst einmal prüfen ob der >> Motor im Halbschrittbetrieb stark genug ist das Teleskop nachzuführen. > > Für die Kraft des Motors ist es egal, ob er im Voll-, Halb- oder > sonstwie Schrittbetrieb läuft, solange der Strom durch den Treiber > vernünftig geregelt wird. Der Motor läuft nur ruhiger. OK, aber wenn der Motor an sich zu schwach ist muß ich erst mal dieses Problem lösen bevor ich mir Gedanken über einen ruhigeren Lauf mache. Daher werde ich diesen Schritt prüfen bevor ich anfange mit PWM zu spielen. Detlev
Amateur schrieb: >>Das Teleskop sollte mit den Gegengewichten so ausbalanciert sein, dass >>es ganz minimal nach Westen kippt. Bei idealer Einstellung hat der >>RA-Motor fast gar nichts zu. In der Deklination muss das Teleskop in >>seinen Schellen so hingeschoben sein, dass es auch auf die Dec-Achse >>fast kein Drehmoment erzeugt. > > Wird bei diesem Ansatz die Gesamtmasse nicht zum Spielverderber? Teleskoprohre "pendeln" in ihrer Achse hin und her, je länger das Teleskoprohr ("Tubus") desto schlimmer. Aber zum Glück hauptsächlich nur beim beschleunigen und bremsen. Gleichförmig bewegt ist dieses Pendeln kaum ein Problem, es sei denn der Wind weht. Mein Teleskop ist weniger als 30cm lang, das ist eher kurz. Detlev
Gibt's das? Seit 4 Tagen hab ich den Motor am Teleskop und will prüfen ob er in halbschritten nachführen kann, und der Himmel ist eine geschlossene Wolkendecke! Da das Wetter schlecht bleibt werd ich wohl doch den zweiten Schritt vor den ersten setzen und Mikroschritte implementieren ohne vorher zu wissen wie der Motor sich draußen macht. Hab inzwischen Schrittmotoren mit 15° pro Schritt. Ich glaub die sind prima um den Code für Mikroschritte zu debuggen...
Wolfgang schrieb: > Für die Kraft des Motors ist es egal, ob er im Voll-, Halb- oder > sonstwie Schrittbetrieb läuft Nein
Detlev S. schrieb: > Das Ding macht schön seine 200 Voll- bzw 400 Halbschritte. Aber eben nur > 1 Vollschritt alle 4 Sekunden. Eine kontinuierliche(re) Bewegung wäre > besser. > PWM für Mikroschritte kriegt man wohl in der Zeit mit 'nem Atmel > irgendwie hin. Besorge dir für deinen Schrittmotor einen neueren Schrittmotor-Treiber-IC, der von sich aus Mikroschritte macht. Beispiel: ON bzw. Sanyo LV8772. Der ist noch DIL und gut kühlbar und kann bis zu 1/16 Step. Allerdings brauchst du für neuere Schrittmotor-IC's einen Schrittmotor mit 4 Anschlüssen, also bipolar, keinen mit 6 Anschlüssen. Es gibt noch welche von Allegro, aber vom simpelsten, der auf den Arduino-Platten von Schmalzhaus drauf ist, kann ich nur abraten, denn der hat ne Sättigungsspannung von bis zu 3.5 Volt und wird deshalb ganz schnell kochend heiß. Naja und die anderen von Allegro sind im winzigen QFN und das ist für Bastler problematisch. Gemeinsames Kennzeichen all dieser IC's ist, daß sie nur 2 Signale brauchen: Richtung und Step-Impulse. W.S.
Danke für den Hinweis, ich werd die Temperaturen im Auge behalten.
Bastler schrieb: > Nein Da interessiert mich jetzt mal ganz deutlich deine Begründung. Halbschrittbetrieb z.B. unterscheidet sich in der Bestromung und damit im Feld bei genau jedem zweiten Schritt überhaupt nicht vom Vollschrittbetrieb, sofern man die Ströme wie üblich regelt. http://de.nanotec.com/support/tutorials/schrittmotor-und-bldc-motoren-animation/
Wolfgang schrieb: > Bastler schrieb: >> Nein > > Da interessiert mich jetzt mal ganz deutlich deine Begründung. > > Halbschrittbetrieb z.B. unterscheidet sich in der Bestromung und damit > im Feld bei genau jedem zweiten Schritt überhaupt nicht vom > Vollschrittbetrieb, sofern man die Ströme wie üblich regelt. Das Drehmoment fällt bei Halb/Viertel- usw. Schritt ab. Siehe hier: Beitrag "Re: Drehmomentverlust bei 1/2 Schritt 1/8 Schritt ?"
Angehängte Dateien:
-

ra_motor_sch.png
76 KB
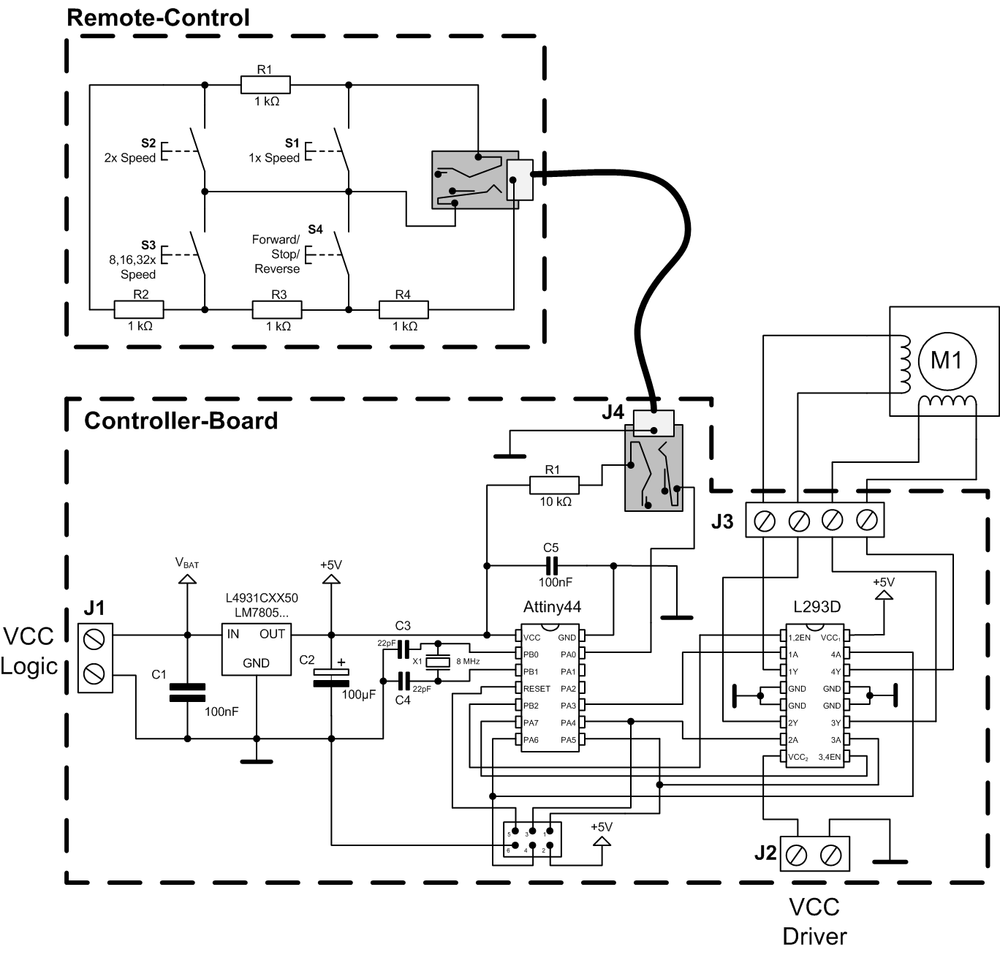
Am besten ist es wenn du eine EQ2-Montierung hast. Kosten nicht mehr die Welt und haben von Haus aus schon eine Übersetzung von 144 Zähne über Schnecke => auf 140 Zähne. Dann brauchst du mit einem Zahnrad (was ich mir in Polen fertigen lassen habe Beitrag "Re: Zahnrad mit Modul 0,35 und ~32 Zähnen gesucht") nur noch 3,8995 Schritte/s um die Erdrotation auszugleichen. Dann noch eine Einfache Schaltung dazu (siehe Bild), ein paar Zeilen Code und das wars.
:
Bearbeitet durch User
Danke für den Hinweis, aber es geht mir auch darum vorhandenes Material zu nutzen. Im Vergleich zur Leistung kostet auch eine NEQ5 nicht die Welt... Inzwischen hab ich aus einem uralten Diaprojektor eine relativ große Schnecke und deren Zahnrad aus Plastik rausoperiert. Mal schauen ob das genutzt werden kann... Schlimmstenfalls muß ich die Originale Nachführung kaufen.
Bastler schrieb: > Das Drehmoment fällt bei Halb/Viertel- usw. Schritt ab. > Siehe hier: > Beitrag "Re: Drehmomentverlust bei 1/2 Schritt 1/8 Schritt ?" Meintst du diesen Satz: "Dadurch wird annähernd (ca 95%) das gleiche Drehmoment wie beim Vollschrittbetrieb erreicht."
Wolfgang schrieb: > Bastler schrieb: >> Das Drehmoment fällt bei Halb/Viertel- usw. Schritt ab. >> Siehe hier: >> Beitrag "Re: Drehmomentverlust bei 1/2 Schritt 1/8 Schritt ?" > > Meintst du diesen Satz: "Dadurch wird annähernd (ca 95%) das gleiche > Drehmoment wie beim Vollschrittbetrieb erreicht." Das Problem bei meiner momentanen Hardware dürfte sein daß sie die im Text erwähnte Stromerhöhung zur Kompensation des Drehmomentverlustes nicht macht. Dolles Teil so ein Treiber-IC. Aber bevor ich Geld für so 'nen Superchip ausgebe oder aufgebe und was fertiges kaufe versuch ich zuerst mal das Plastikzahnrad zu nehmen. Es hat 32 schräge Zähne, was bei einfach zu realisierendem Halbschrittbetrieb immerhin zu 16 Schritten pro Sekunde führt. OK, auch hier wieder Schneckenspiel usw, aber einen Versuch ist es wert. Ich halt euch auf dem laufenden Detlev
So, nachdem ich merkte daß es länger her ist daß ich mich mit PWM beschäftigt habe und das Wissen tief vergraben war machte ich erst mal eine Woche was anderes. Durch Zufall(?) sah ich eine Anzeige für einen Schrittmotortreiber Typ A4988 und habe dann mal gegoogelt was sowas denn kostet. Bei 1 Euro Stückpreis konnte ich nicht wiederstehen und hab bestellt. Das Ding macht 1/16 Schritte "ausem Lamäng", also ohne Hilfestellung, regelt dabei auch noch den Strom nach und wird noch nicht mal warm unter seinem Mini-Kühlkörper. Richtig ausprobieren ging bisher nicht. Entweder ich bin nicht zuhause oder der Himmel zieht sich zu sobald ich mich dem Teleskop nähere... Ein Getriebe hab ich auch gefunden, ein alter 5Euro-Akkuschrauber mit kaputtem Motor war der Spender. Da grübel ich aber noch über die Befestigung. gute Nacht Detlev
Detlev S. schrieb: > Das Ding macht 1/16 Schritte "ausem Lamäng", also ohne Hilfestellung, > regelt dabei auch noch den Strom nach und wird noch nicht mal warm unter > seinem Mini-Kühlkörper. Na, dann schau Dir das mal an: http://fabmo.de/news/kleiner-schrittmotortreibertest-laute-und-leise-motoren-eine-oddysee/ Langsame Bewegungen (und vielleicht auch schnelle) mit Mikroschritten gelingen offensichtlich nicht mit allen Treibern optimal ...
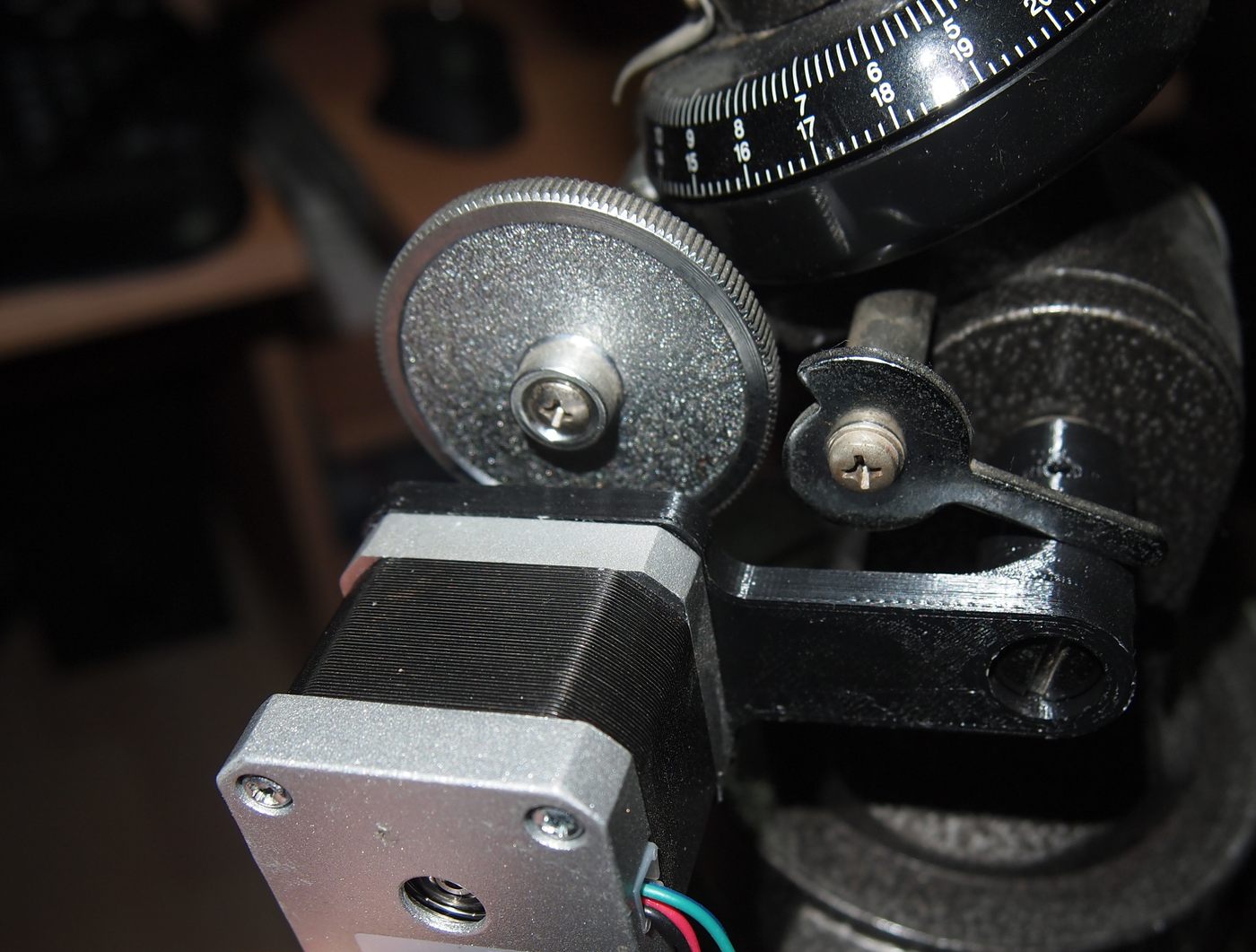
Hallo Dieter, die Post war da. Gleich der erste Treiber macht was er soll, je nach gewählten Bitmuster an der Mirkoschrittauswahl rattert der Motor schneller oder langsamer vor sich hin. Da heute immer noch kein Himmel zum beobachten vorhanden war habe ich den Motor ans Teleskop geschraubt und ihn schneller als geplant laufen lassen einfach mal um zu sehen was passiert. Ergebnis: Der Motor ist zu schwach den Schneckentrieb direkt zu drehen, selbst im Vollschrittbetrieb. Das ging mit L293D auch nicht so rcht, ich hab das aber auf die hohen Verluste in der Brücke geschoben. Aber selbst mit dem A4988 sieht und hört man daß er zwischen zwei Positionen hin- und herspringt sobald das Schneckenspiel überwunden ist. Ein Gewicht am Teleskop so plaziert daß es beim drehen der Schnecke hilft löst das Problem für ein paar Schritte aber dann ist schon wieder Schluß. Bei höheren Umdrehungszahlen könnte eine Schwungmasse helfen, aber das was ich hier mache ist ja kurz vor statischem Betrieb. Also ist ein zusätzliche Übersetzung notwendig, wenn es überhaupt klappen soll. Randnotiz: Auf dem Treiberplatinchen entdecke ich keine Schutzdioden, die werde ich wohl nachrüsten wenn das Ding in rauher Umgebung seinen Dienst verrichten soll. Das sollte zu schaffen sein. Gruß Detlev
Detlev S. schrieb: > Das Ding macht schön seine 200 Voll- bzw 400 Halbschritte. Aber eben nur > 1 Vollschritt alle 4 Sekunden. Eine kontinuierliche(re) Bewegung wäre > besser. Es gibt ein paar Low-Budget-Ansätze aus dem Astrotreff-Forum. Das eine ist ein Schneckengetriebe am Stepper und das andere sieht so aus (und ist aus meiner Sicht die originellere Lösung): Eine nicht zu elastische Schnur wird mehrfach um den Stepper und ein großes Holzrad/Drehteller (D ca. 30cm) gewickelt und befestigt (ähnlich wie bei einer alten Röhrenradio-Abstimmeinheit am Drehkondensator). Damit kann man auch bestens Astrofotografie betreiben, weil der Lauf sehr ruckelfrei ist durch die große Übersetzung vom Durchmesser der Stepperachse zum Drehteller - und auch sehr wiederholgenau.
Angehängte Dateien:
-

nachfuehrung1.jpg
200 KB -

nachfuehrung2.jpg
180 KB

Also wenn es billig sein soll würde ich ala Barndoor arbeiten: https://www.google.com/search?q=Barndoor+astro&espv=2&biw=1276&bih=939&source=lnms&tbm=isch&sa=X&ved=0CAYQ_AUoAWoVChMIqNGz2eX-yAIVx9wsCh2X4geJ&dpr=1 Ansonsten wie schon von mir gesagt eine gebrauchte EQ2 mit entsprechendem Zahnrad. Halterung mit 3D-Drucker gedruck und Antrieb via DRV8825, dann kann man auch ohne Probleme 8x oder 16x drehen
:
Bearbeitet durch User
Arndt schrieb: > Es gibt ein paar Low-Budget-Ansätze aus dem Astrotreff-Forum. Das eine > ist ein Schneckengetriebe am Stepper und das andere sieht so aus (und > ist aus meiner Sicht die originellere Lösung): > > Eine nicht zu elastische Schnur wird mehrfach um den Stepper und ein > großes Holzrad/Drehteller (D ca. 30cm) gewickelt und befestigt (ähnlich > wie bei einer alten Röhrenradio-Abstimmeinheit am Drehkondensator). > Damit kann man auch bestens Astrofotografie betreiben, weil der Lauf ... Hallo Arndt 30 cm? Oje, das ist eine Schallplatte! Wo soll die denn hin ohne an einem der drei Beine zu scheuern :-) Maximal 10cm Durchmesser könnte ich mir vorstellen. Wo kriegt man denn so ein Skalenseil? Ich hab vor längerer Zeit mal nach sowas gesucht und hatte am Ende "Maurerschnur" in der Hand. Leider war die zu rutschig. Ein Schneckengetriebe hab ich, allerdings hat das Schneckenrad kein zentriertes Achsloch mehr, es ist ausgebrochen. Mal sehen ob ich da was basteln kann. Dolles Projekt... Detlev
Jepp, 'ne Barndoor ist super für Kameras, ich hab hier aber ein Mini-Newton 76/300 das ich hauptsächlich visuell und experimetell auch mal mit 'ner Webcam nutzen möchte. Die EQ-1 sollte dieses Mini-Teleskop tragen können. Die Ankopplung des Schrittmotors über Zahnräder kommt mir bekannt vor, so sah das damals auch bei meinem 114/900 auf seiner Astro-3 aus. Das Set ist aber schon lange verkauft sonst hätt ich diesen Thread hier nicht losgetreten sondern das Teleskop gleich auf die Astro-3 gepackt. Ich geh noch mal auf die Suche nach Zahnrädern...
Dieter F. schrieb: > Langsame Bewegungen (und vielleicht auch schnelle) mit Mikroschritten > gelingen offensichtlich nicht mit allen Treibern optimal ... Da wächst gerade das Verständnis für die bei Schrittmotortreibern wählbaren Decay-Modi ;-) Vielleicht wäre so ein kleiner Schrittmotor mit integriertem 12:425 Getriebe eine Option - mechanisch kompakt, allerdings auf Grund der hohen Strangspannung eher nicht für hohe Drehzahl und nur 48 Schritte/Umdrehung http://www.pollin.de/shop/dt/MzE1OTg2OTk-/Motoren/Schrittmotoren/Getriebe_Schrittmotor_NMB_MAT_PG35L_048_USC0.html
Mike schrieb: > Vielleicht wäre so ein kleiner Schrittmotor mit integriertem 12:425 > Getriebe eine Option - mechanisch kompakt, allerdings auf Grund der > hohen Strangspannung eher nicht für hohe Drehzahl und nur 48 > Schritte/Umdrehung > http://www.pollin.de/shop/dt/MzE1OTg2OTk-/Motoren/Schrittmotoren/Getriebe_Schrittmotor_NMB_MAT_PG35L_048_USC0.html Danke für den Hinweis, leider schon ausverkauft. Ich werd mal versuchen das Getriebe vom Akkuschrauber zu adaptieren.
Ein paar letzte Worte: Nachdem die Adaption des Akkuschraubergetriebes aufgrund der dünnen dort verwendeten Welle nicht so recht gelang und der Stepper beim basteln Schaden gemommen hatte hab ich die Teleskopmontierung unmodifiziert weiter verkauft. Der neue Besitzer will sie für seine DSLR verwenden und kauft sich ggf einen Motor. Er hat also was für seine Kamera und ich hab einen Zeitfresser weniger im Keller. Eine Win-Win-Situation! Klare Sicht allen Sterneguckern da draußen! Detlev
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.