Hallo Foraner, habe an meinem 3D-Drucker ein Problem mit dem Schrittmotor der Z-Achse: Wenn ich ihn auf eine feste Unterlage drücke, oder auch mit einem grösseren Schraubenschlüssel zusammenpresse, läuft er normal, gut und kräftig. Liegt er aber lose auf dem Tisch oder halte ihn in der Hand, fällt er reproduzierbar aus dem Takt und surrt dann stehend. Manchmal sofort, manchmal erst so nach einer Umdrehung. Rampe ist vorhanden, das ist nicht das Problem, weil er ja manchmal schon eine Umdrehung macht. Ein Elektrisches kann ich ausschliessen (Isolierung, Erdung). Der Treiber DRV8825 ist auch OK (versch. probiert, geht nicht auf FAULT). Schrittmotoren auch mit zwei probiert (Pollin, PSM57BYGHM201), Beide gleich. Die Z-Achse ist auf der Y-Achse montiert, darum tritt das Problem auch hier auf, auch wenn erst nach ein paar Läufen. Aber trotzdem hat der Aufbau seine Steifigkeit! Aber die Motoren und Treiber sind die Gleichen, und mit den anderen Achsen fahre ich problemlos 4-mal schneller! Ist das ein Resonanzproblem? Gruss Chregu
Christian M. schrieb: > Liegt er aber lose auf dem Tisch oder halte ihn in der Hand, fällt er > reproduzierbar aus dem Takt und surrt dann stehend. Völlig normal, Schrittmotoren funktionieren nur gut wenn Schwingungen gedämpft werden, Stichwort Bremsresonatorplatte. Mikroschritte helfen etwas.
Das Problem tritt auf, wenn Schrittmotoren nur gesteuert- und nicht (drehmomentabhängig) geregelt werden. Man kann durch geeignete Maßnahmen das Verhalten des Stromes und damit das des Motors ermitteln und die Ansteuerung entsprechend gestalten: http://www.freepatentsonline.com/EP2068436.html Ansonsten muss das Lastmoment / die Dämmung als Parameter in die Steuerung mit rein und dann auch immer in der Weise vorhanden sein.
MaWin schrieb: > Stichwort Bremsresonatorplatte Ja danke, das ist es! Nur leider findet man fast nichts dazu, geschweige denn wie das praktisch ausgeführt wird. Gibt's da einen englischen Begriff dazu? Gruss Chregu PS: Konnte erst jetzt wieder schreiben, hatten gestern den ganzen Abend kein Internet!
Christian M. schrieb: > Gibt's da einen englischen > Begriff dazu? Bestimmt. Zu deutsch einfach Dämpfer. Zur Befestigung: https://de.nanotec.com/produkte/1117-daempfer-fuer-anbauflansch/ oder für das 2.Wellenende, was bei Dir leider fehlt: https://de.nanotec.com/produkte/1090-daempfer-fuer-b-welle/
Mit welcher Schritt-Einstellung fährst du die Motoren denn? Im Mikroschritt sollte man die Motoren eigentlich nicht so leicht in die Resonanz bringen. Von Vollschritt würde ich dringend abraten, sondern mindestens 1/4-Schritt oder feiner verwenden. Vielleicht probierst du auch mal einen anderen Treiber. Es kann durchaus sein, dass deine Treiber ein schlechtes Timing beim Mixed-Decay haben [1]. Für die weitere Beurteilung wären Bilder von der Mechanik hilfreich. Steifigkeit ist ein sehr dehnbarer Begriff, unter einem steifen Aufbau versteht jeder etwas anderes. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/stromregelung-von-schrittmotoren-auf-das-abschalten-kommt-es-an/
Angehängte Dateien:
-

P1060039.jpg
180 KB -

P1060038.jpg
120 KB -

P1060035.jpg
140 KB -

P1060034.jpg
140 KB
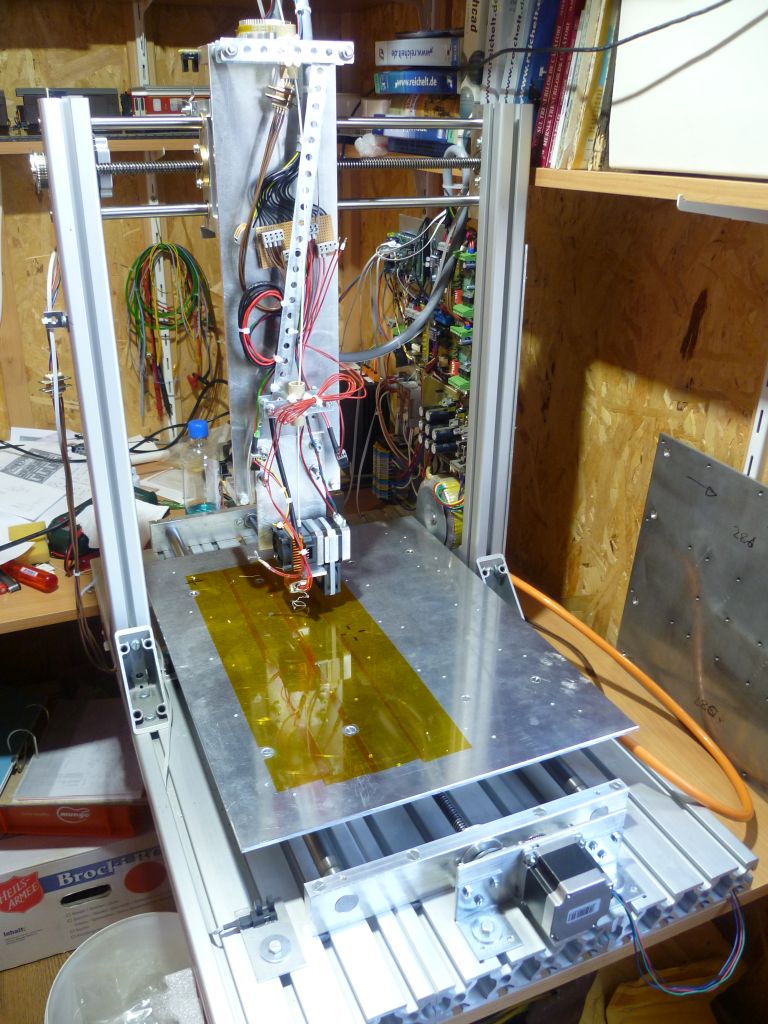
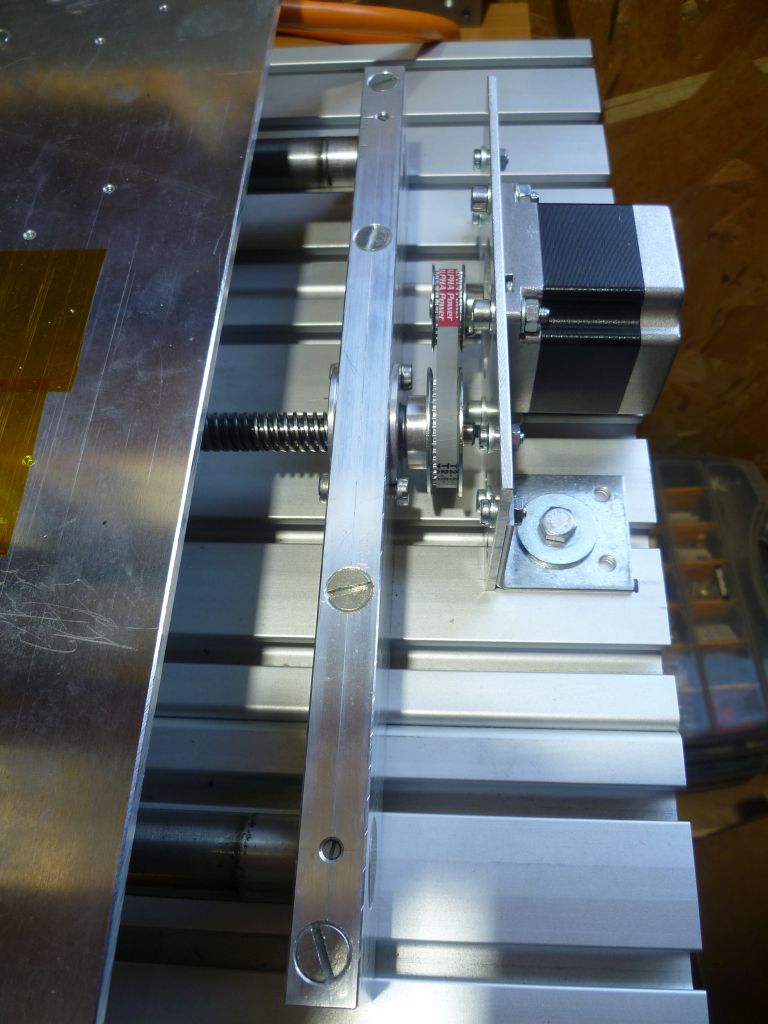
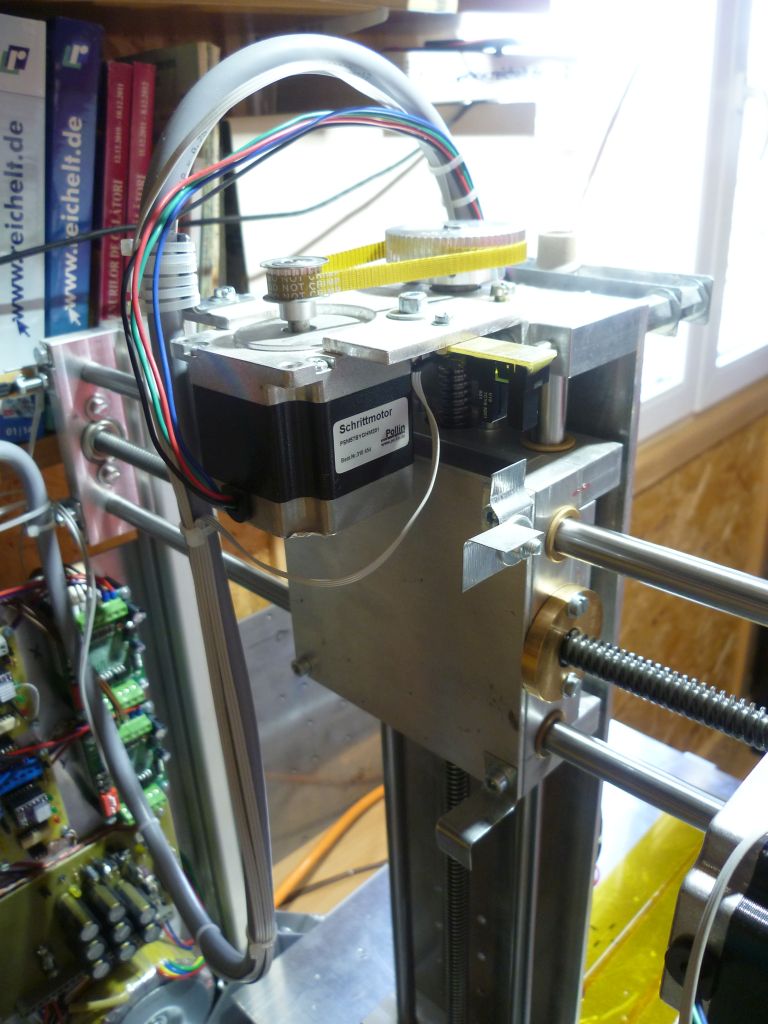
m.n. schrieb: > Bestimmt. Zu deutsch einfach Dämpfer. > Zur Befestigung: > https://de.nanotec.com/produkte/1117-daempfer-fuer-anbauflansch/ > oder für das 2.Wellenende, was bei Dir leider fehlt: > https://de.nanotec.com/produkte/1090-daempfer-fuer-b-welle/ Danke für die Links. Auf den ersten Blick kann ich mir noch nicht so recht vorstellen, wie das montiert wird. Thorsten O. schrieb: > http://www.schrittmotor-blog.de/stromregelung-von-... Ja, da war ich schon öfters. Wusste nicht, dass Du hier mitliest :-)) Kommt man ja auch hin mit dem Stichwort "Bremsresonatorplatte". Thorsten O. schrieb: > Mit welcher Schritt-Einstellung fährst du die Motoren denn? In der Feinsten, je nach Treiber. Ich habe schon den A4988 und DRV8825, und momentan bei 2 Achsen den TB6560. Thorsten O. schrieb: > Decay Den Mod habe ich beim Extruder gemacht. Hat perfekt funktioniert. Siehe Beitrag "Re: Schrittmotor im Mikroschrittbetrieb" Thorsten O. schrieb: > Bilder von der Mechanik Siehe Anhang. Gruss Chregu
Über den Motorstrom selber hast Du nichts geschrieben. Um Resonanzen zu reduzieren ist es sinnvoll, den Strom nur so hoch einzustellen, wie er für das benötigte Drehmoment gebraucht wird. Ein zu hoher Motorstrom erzeugt zudem erhöhten Lärm, der sich störend anhört. "Viel hilft viel" trifft hier nicht zu!
Oh, ja. Habe momentan auf Motorennemmstrom eingestellt. Deshalb, weil ich gelesen habe, man soll ja nicht nach Gefühl oder Gehör einstellen, sondern ausschliesslich auf Nennstrom der Motoren. Wie würde das praktisch Aussehen? Nennstrom reduzieren bis Schrittverlust, dann 50% mehr oder so? Gruss Chregu
Es hängt von vielen verschiedenen Faktoren ab, sodaß Du experimentell vorgehen mußt. Christian M. schrieb: > Wie würde das praktisch Aussehen? Nennstrom reduzieren bis > Schrittverlust, dann 50% mehr oder so? Es wird kein Schrittverlust auftreten, sondern der Motor wird bei zu gerigem Strom stehen bleiben. Dann ca. 20-30% Zuschlag geben und ausgiebig testen. Das Gehör spielt dennoch eine große Rolle: zu hoher Strom sorgt für rauhes Laufgeräusch, was sehr nervig sein kann.
Angehängte Dateien:
-

P1060049.jpg
140 KB
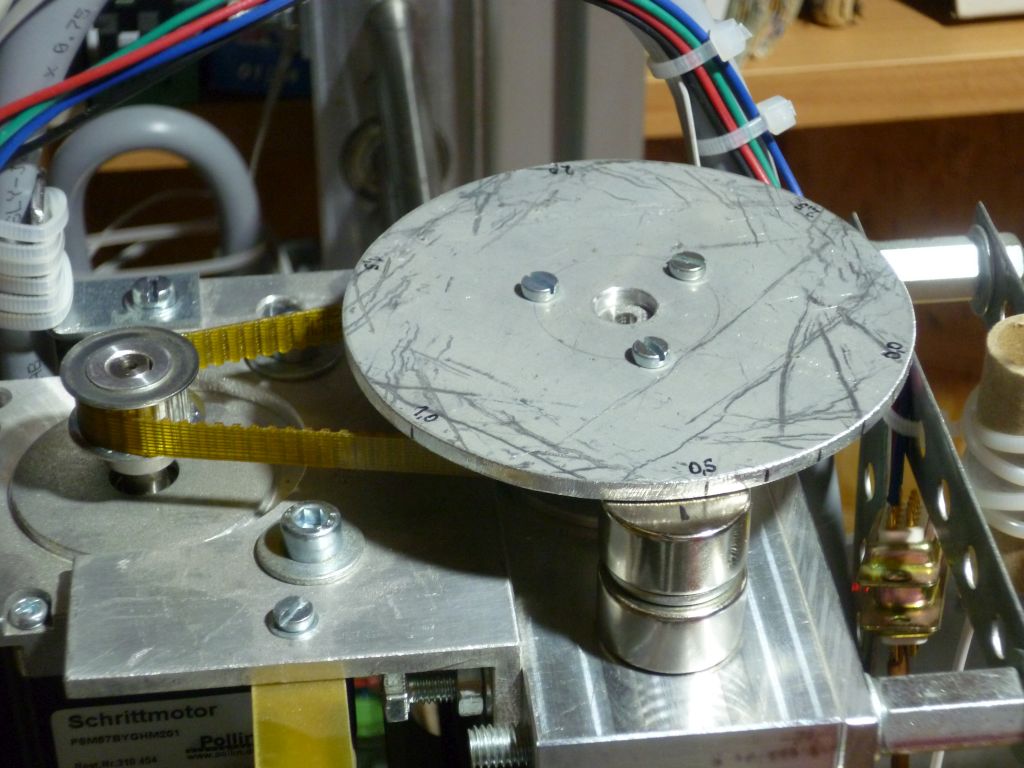
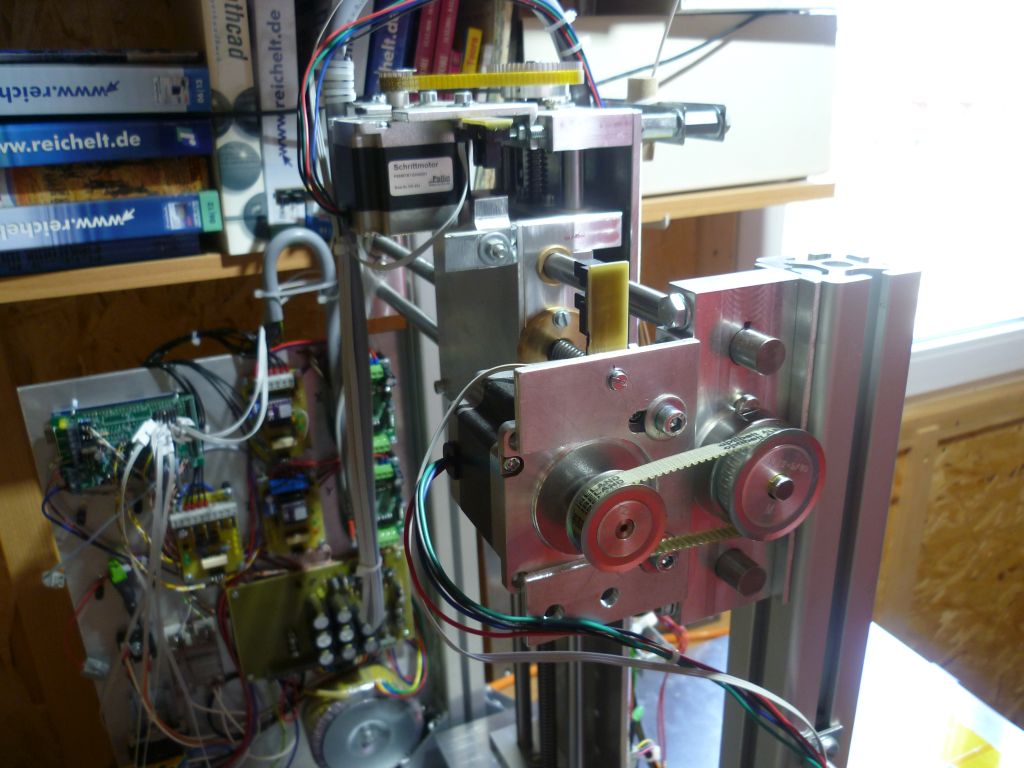
So, habe jetzt getestet, ausgiebig. Und einen "Dämpfer" montiert, siehe Beilage. Aluminiumscheibe mit 2 Neodym-Magneten. Habe jetzt an allen Achsen den TB6560. Damit lässt sich wunderbar das Decay perfekt einstellen! Den Strom halt nur schrittweise, aber das langt. Vielen Dank an alle! Gruss Chregu
Christian M. schrieb: > Habe jetzt an allen Achsen den TB6560. Damit lässt sich wunderbar das > Decay perfekt einstellen! Und kannst Du auch hören, daß der Motor nun besser läuft?
m.n. schrieb: > kannst Du auch hören, daß der Motor nun besser läuft? Ja extrem! Das schrille Pfeifen bei schneller Drehung und unruhige, holprige Lauf bei niedriger Drehzahl ist weg! Gruss Chregu
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.