
Hallo zusammen, wo finde ich diese *collect2.exe* und was bedeutet die Fehlermeldung hierzu ? Bernd_Stein
Angehängte Dateien:
-

Marlin_AS7_Compile_Error.jpg
260 KB
Offensichtlich handelt es sich um ein Arduino Projekt. Du verwendest die falsche IDE. Mach es so, wie in der Anleitung des Projektes beschrieben ist: http://marlinfw.org/docs/basics/install.html
Stefanus F. schrieb: > Offensichtlich handelt es sich um ein Arduino Projekt. Du verwendest die > falsche IDE. Es gibt doch auch Arduino-Wrapper für das Atmel-Studio. Sowas fehlt hier wohl.
STK500-Besitzer schrieb: > Es gibt doch auch Arduino-Wrapper für das Atmel-Studio. > Sowas fehlt hier wohl. Allerdings ist das kein simpler Sketch, sondern schon deutlich komplexer aufgebaut. Ob der Arduino-Wrapper damit zusammen funktioniert, ist fraglich. Der Autor des Projektes hat es jedenfalls nicht vorgesehen.
Stefanus F. schrieb: > Allerdings ist das kein simpler Sketch, sondern schon deutlich komplexer > aufgebaut. Ob der Arduino-Wrapper damit zusammen funktioniert, ist > fraglich. Der Autor des Projektes hat es jedenfalls nicht vorgesehen. Zumindest ist es der erste Teil, der fehlt... Marlin kompiliert man doch sowieso nur mit Arduino. Das arbeitet in dem Fall soch mit den Arduino-Libraries sogar plattformübergreifend (also auch auf dem DUE mit dem arm-Controller). Die Arduino-IDE kümmert sich dann auch um die Einbindung der passenden Libraries, was man im AtmelStudio selber erledigen muss.
Ich baue Marlin im Moment mit vscode und PlatformIO. Und mit PlatformIO wird Marlin offensichtlich auch entwickelt. Damit kann man dann auch flashen, wenn denn der Bootloader schon geflasht ist. Alternativ geht es mit der ArduinoIDE oder auch mit AS7 und Visal Micro Plugin. Ich habe das gerade mal mit der Arduino IDE 1.8.5 und Marlin 1.1.9 ausprobiert, läuft durch und hat den Vorteil das auch eine Marlin.ino.with_bootloader.hex gebaut wird, wenn man sowas denn braucht. Für einen Ender-3 brauche ich das und die .hex werde ich morgen mit AS7 da drauf flashen. Wobei man dazu auch die notwendigen Libs installieren muss. Mit dem Visual Micro Plugin für AS7 habe ich Marlin gebaut bevor ich auf vscode und PlatformIO umgestiegen bin, zuletzt 1.1.7 oder so. Marlin 2.x wird mit der ArduinoIDE oder AS7 allerdings schwierig, mit Glück funktioniert da die 2.x Beta der ArduinoIDE. Mit PlatformIO ist die neue Verzeichnis-Struktur von Marlin 2.x aber überhaupt kein Problem.
Rudolph R. schrieb: > Marlin 2.x wird mit der ArduinoIDE oder AS7 allerdings schwierig, mit > Glück funktioniert da die 2.x Beta der ArduinoIDE. > Mit PlatformIO ist die neue Verzeichnis-Struktur von Marlin 2.x aber > überhaupt kein Problem. Das eigentliche "Problem" bei der 2.x ist, dass man etwaige Arduino-Libs manuell installieren muss, während das PlatformIO bei der Initialisierung automatisch macht.
Rudolph R. schrieb: > Mit dem Visual Micro Plugin für AS7 habe ich Marlin gebaut bevor ich > ... > Ich habe mir die Marlin-Version 1.1.9 heruntergeladen. Das AS7 soll ja einige Vorteile gegenüber der Arduino-IDE haben, wie z.B. DebugWire. Deshalb würde ich gerne die AS7-IDE nutzen. Wäre mein Problem denn dann gelöst, wenn ich dieses Visual Mirco Plugin in AS7 installiere ? Bernd_Stein
Ja, mit Visual Micro sollte das auch in AS7 gehen
@Bernd_Stein: Nur der Neugierde wegen: Welche Hardware nutzt Du noch, außer dem Arduino Mega 2560? Ein RAMPS-Shield?
Bernd S. schrieb: > Das AS7 soll ja einige Vorteile gegenüber der Arduino-IDE haben, wie > z.B. DebugWire. Deshalb würde ich gerne die AS7-IDE nutzen. Mit dem Plugin bleibt das erstmal ein Arduino Projekt, der Unterschied ist "nur" der deutlich bessere Editor vom Visual Studio gegenüber der ArduinoIDE. Debuggen geht wenn überhaupt nur mit der "Pro" Version von dem Plugin. Das wird auch mit dem Compiler der ArduinoIDE compiliert und nicht etwa mit dem GCC vom AS7.
Tim schrieb: > @Bernd_Stein: > Nur der Neugierde wegen: Welche Hardware nutzt Du noch, außer dem > Arduino Mega 2560? Ein RAMPS-Shield? > Ja richtig, das 1.4 und das *RepRapDiscount Full Graphic Smart Controller* Display. Habe auf meinem TRONXY X3A ein MELZI-Board 2.0_V5 mit der MARLIN Version V1.0. Und da ich gerne die Trinamic SilentStep-Module wegen dem Stealth-Modus haben möchte und die Marlinversion hin und wieder abstürzt, dachte ich, das Ganze günstig umzurüsten und dabei mit dem Display-Board eine bessere Bedienung zu erlangen. Rudolph schrieb: > Debuggen geht wenn überhaupt nur mit der "Pro" Version von dem Plugin. > > Das wird auch mit dem Compiler der ArduinoIDE compiliert und nicht etwa > mit dem GCC vom AS7. > Hm - und das ist sicherlich dann wieder kostenpflichtig. Hatte mir das wieder einmal einfacher vorgestellt. Werde dann wohl einfach den Vorschlag von Stefanus F. weiterverfolgen. Stefanus F. schrieb: > Mach es so, wie in der Anleitung des Projektes beschrieben ist: > http://marlinfw.org/docs/basics/install.html > Bernd_Stein
Bernd S. schrieb: > Habe auf meinem TRONXY X3A ein MELZI-Board 2.0_V5 mit der MARLIN > Version V1.0. Und da ich gerne die Trinamic SilentStep-Module wegen dem > Stealth-Modus haben möchte und die Marlinversion hin und wieder > abstürzt, dachte ich, das Ganze günstig umzurüsten und dabei mit dem > Display-Board eine bessere Bedienung zu erlangen. Hier werkelt ein Anet A6 mit Grafikdisplay. Nachdem ich den Bed-Level-Sensor nachgerüstet habe, mußte natürlich eine neue Firmware drauf. Mit Marlin habe ich überhaupt keine Stabilitätsprobleme. Letztens wollte ich updaten auf Marlin 1.1.9 und die Drehzahl von der Filamentkühlung reduzieren (der Lüfter nervt bei hohen Drehzahlen). Kann jemand einen leisen 50x50x15 Radiallüfter für 12V DC empfehlen? Für 20€ gibt es ebm papst in Fernost, aber ist das wirklich Marke oder Billigkopie? Mit den ganzen Funktionen (Grafikdisplay, SD-Unterstützung, Auto-Bed-Level, PID-geregelte Nozzle, etc.pp.) ist der Flash vom ATmega1284P einfach zu voll. Ich hätte ja einen größeren Chip draufgemacht, aber im 44-Pin TQFP gibt es scheinbar nix mit mehr Flash, was Pinkompatibel ist. Kompiliert wird direkt mit Arduino (1.8.5), ich will die Firmware ja nicht debuggen oder modifizieren. Ich überlege ein neues Controllerboard anzuschaffen. Dabei wären die Anforderungen: - genug Platz (>128 kByte) für die Marlin-Firmware mit allen Optionen - ein zeitgemäßer 32-Bit Controller - ggf. Unterstützung für 2. oder 3. Extruder, falls mal mehr Farben dazukommen - wenn möglich JST-Buchsen, damit der Umbau nicht so aufwändig wird Aber irgendwie fällt es schwer einen Überblick zu bekommen zwischen Rumba, RAMPS, RAMPS-FD, RADDS, GT2560, Smoothieboard, PrntrBoard, Azteeg X5, AZSMZ und wie sie alle heißen...
Angehängte Dateien:
-

Marlin_flashen_error.jpg
260 KB

Was muss ich ändern ? Habe das RAMPS 1.4 auf das Arduino Mega 2560 gesteckt und auch das Display angeschlossen. Das USB-Kabel ist direkt mit dem Arduino Mega 2560 Board verbunden. Bernd_Stein
Hast du den richtigen Port ausgewählt?
Marlin in 54398 Bytes? Alle Features aus?
Ich denke, du hast den falschen Programmieradapter ausgewählt. Der Atmel ICE ist ein klein wenig komplexer, als ein USB Kabel. Da gibt es sicher eine Einstellung für den Arduino Bootloader.
Arduino Version: 1.8.7 Board: Arduino/Genuino Mega or Mega 2560 Processor: ATmega2560 (Mega 2560) Programmer: USBTinyISP Funktioniert blendend. Einfach nicht zu schnell nach dem kompilieren auf den upload Button drücken, sonst gibts Fehlermeldungen.
Angehängte Dateien:
-

Arduino_Bootloader_Error.jpg
180 KB

Christopher J. schrieb: > Hast du den richtigen Port ausgewählt? > Mir steht nur COM1 zur Verfügung. Rudolph schrieb: > Marlin in 54398 Bytes? > Alle Features aus? > Keine Ahnung. Stefanus F. schrieb: > Da gibt es sicher > eine Einstellung für den Arduino Bootloader. > Ja, aber siehe Screenshot Daniel B. schrieb: > Programmer: USBTinyISP > Hab ich leider nicht. Brauch ich überhaupt irgend ein Programmer ? Reicht es nicht AVRISP auszuwählen und dann mittels USB den Bootloader zu flashen ? Bernd_Stein
> Brauch ich überhaupt irgend ein Programmer ?
Wie gesagt, das Board wird normalerweise über einen Bootloader
programmiert. Programmer sind für Board ohne Bootloader gedacht.
Angehängte Dateien:

Stefanus F. schrieb: > Programmer sind für Board ohne Bootloader gedacht. > Ich denke mittlerweile, das ich ein Problem mit dem Treiber habe. Auf meinem Arduino Mega 2560 Clone ist der USB-Seriell-Baustein ohne Aufdruck, aber ich denke, das es der im Link ist, da auch bei mir ein 12MHz Quarz oberhalb des Chips ist. Ich weiß nur nicht welche Datei ich für Win7-32-BIT herunterladen soll. Beitrag "Re: Arduino CH340" Bernd_Stein
:
Bearbeitet durch User
Der CH-340 Chip hat normalerweise einen Aufdruck. Du kannst Dir in der Systemsteuerung anschauen, welche Vendor-ID und Product-ID der Chip hat. Google nach diesen Hexadezimal-Zahlen, dann wirst du herausfinden, welche Chip es ist. Windows 10 lädt die Treiber für alle mir bekannten Chips automatisch aus dem Internet (auch für den CH340).
Den CH340/CH341 Treiber bekommst du von der Webseite seines Herstellers: http://www.wch.con/download/CH341SER_ZIP.html (ersetze .con durch .cn)
Angehängte Dateien:


So, ich scheine nun endlich was hochgeladen zu haben. Die Arduino-IDE schreibt:" Hochladen abgeschlossen. " Nur weiß ich nicht was, denn das Display zeigt nichts an. Habe jetzt mal das RAMPS 1.4 abgezogen, um zu gucken, was die roten LEDs auf dem Mega-Clone-Board machen. Nachdem Aufstecken des USB-Kabels blinkt L ein paar mal und bleibt dann ständig an, ON ist bereits ständig an und RX blitzt kurz auf, wenn L in Dauerlicht übergeht. Wenn ich in der Arduino-IDE über Werkzeuge => Boardinformation holen gehe, bekomme ich Unbekanntes Board angezeigt. Welchen Sketch soll ich über Sketch => Sketch-Ordner anzeigen auswählen, um das Mega-Clone-Board mal zu testen ? Bernd_Stein
Bernd S. schrieb: > Welchen Sketch soll ich über Sketch => Sketch-Ordner anzeigen auswählen, > um das Mega-Clone-Board mal zu testen ? Hm, "Datei->Beispiele->Basics->Blink"?
Jan L. schrieb: > Hm, "Datei->Beispiele->Basics->Blink"? > Danke, das funktioniert. Die L-LED blinkt ca. im Sekundentakt. Rudolph schrieb: > Marlin in 54398 Bytes? > Alle Features aus? > Tja, wie kann ich das ändern bzw. überhaupt sehen, was da hochgeladen wurde ? Bernd_Stein
Bernd S. schrieb: > Tja, wie kann ich das ändern bzw. überhaupt sehen, was da hochgeladen > wurde ? Äh, na irgendwas musst Du doch konfiguriert haben in der Configuration.h und der Configuration_adv.h. 54k ist auf jeden Fall verdächtig schlank.
Rudolph schrieb: > Äh, na irgendwas musst Du doch konfiguriert haben in der Configuration.h > und der Configuration_adv.h. > 54k ist auf jeden Fall verdächtig schlank. > Ich bin mehr oder weniger nach diesem Video vorgegangen. https://www.youtube.com/watch?v=Yc4wqHrZtWE Bernd_Stein
Und jetzt schauen wir uns alle dieses Video an, um anschließend zu raten, was du genau gemacht hast (mehr der weniger...)?
> Daniel B. schrieb: >> Programmer: USBTinyISP >> > Hab ich leider nicht. > Brauch ich überhaupt irgend ein Programmer ? > Reicht es nicht AVRISP auszuwählen und dann mittels USB den Bootloader > zu flashen ? > Was heisst habe ich nicht ? Ich meine nicht einen HW-Programmer, ich meine die Einstellungen in der IDE (hast Du ja gepostet), dort stellst Du unter "Programmer" den "USBTinyISP" ein. Damit lade ich meine Programme in 2-3s hoch. In dem gelinkten Video nimmt er den "AVRIPS mkII", scheint auf Linux auch mit dem zu gehen, habe ich nicht getestet. Ich nehme immer zuerst das Blink Beispiel, dann das "Communication->ASCII Table" Beispiel (weiss nicht wie das in der deutschen IDE heißt). Damit kannst über den seriellen Monitor in der IDE die Verbindung testen. Vielleicht schmeißt Du den Clonemüll weg und kaufst ein original Board, damit hättest Du Dir schon Tage an Aufwand gespart....
Daniel B. schrieb: > Du > unter "Programmer" den "USBTinyISP" ein. Damit lade ich meine Programme > in 2-3s hoch. > In dem gelinkten Video nimmt er den "AVRIPS mkII", scheint auf Linux > auch mit dem zu gehen, habe ich nicht getestet. Er hat keinen USBTinyISP und auch keinen AVRISP mkII, sondern einen ATmega2560-Clone mit Bootloader und einen CH430-USB-Seriell-Wandler. Der Upload funktioniert ja jetzt offenbar. Rudolph schrieb: > Marlin in 54398 Bytes? > Alle Features aus? Das denke ich auch. Das Vollgrafikdisplay (ANET_FULL_GRAPHICS_LCD ) braucht bei mir zusätzlich 39 kByte. Wenn man auf einige Menüs verzichtet (SLIM_LCD_MENUS) kann man davon wieder 10 kByte einsparen. Bei mir brauchen die Grundfunktionen von Marlin (1.1.9) 58 kByte.
Rudolph schrieb: > Äh, na irgendwas musst Du doch konfiguriert haben in der Configuration.h > und der Configuration_adv.h. > 54k ist auf jeden Fall verdächtig schlank. > Na dann ist es wohl das Beste, ich packe meine *Configuration.h* als Anhang bei. In der *Configuration_adv.h* meine ich nichts geändert zu haben. Ich kann also davon ausgehen, das ich all diese Dateien, die in der Arduiono-IDE oben als Reiter und die weiteren, welche im Pulldown-Menü aufgeführt sind hochgeladen habe. Aber anscheinend habe ich nicht das richtige Display ausgewählt bzw. irgend etwas nicht richtig konfiguriert. Das Display leuchtet schonmal blau auf, d.h. die Hintergrundbeleuchtung ist eingeschaltet, aber das sagt wahrscheinlich nicht viel aus. Daniel B. schrieb: > Vielleicht schmeißt Du den Clonemüll weg und kaufst ein original Board, > damit hättest Du Dir schon Tage an Aufwand gespart.... > Ja, vielleicht. Aber Zeit ist nunmal auch Geld. Aber dies im umgekehrten Sinne. Ich brauchte ja "nur" die richtigen Informationen und dies war den Treiber für den auf dem Clone verbauten USB-Seriell-Chip ( CH340 ) auf meinen Rechner zu installieren. Tim schrieb: > Bei mir brauchen die Grundfunktionen von Marlin (1.1.9) 58 kByte. > Hm - was läuft dann bei mir falsch, wenn ich nur knapp 54kByte habe ? Habe nicht wie im Video vom März 2015 als Zip die Dateien Marlin-Development & Marlin-Development.zip, sondern nur *Marlin-1.1.x.zip*, welche ich natürlich extrahiert habe. Bernd_Stein
Bernd S. schrieb: >> Bei mir brauchen die Grundfunktionen von Marlin (1.1.9) 58 kByte. > Hm - was läuft dann bei mir falsch, wenn ich nur knapp 54kByte habe ? Ein paar Prozent mehr oder weniger kann von der Version des verwendeten C++ Compilers kommen oder der Version des Arduino Frameworks. Ich würde dem nicht allzu viel Bedeutung beimessen.
Bernd S. schrieb: > Aber anscheinend habe ich nicht das > richtige Display ausgewählt bzw. irgend etwas nicht richtig Du hast wohl eher gar kein Display ausgewählt; probier‘s mal mit dem #define REPRAP_DISCOUNT_SMART_CONTROLLER das passt bei recht vielen i3-Clones...
Jan L. schrieb: > Du hast wohl eher gar kein Display ausgewählt; probier‘s mal mit dem > > #define REPRAP_DISCOUNT_SMART_CONTROLLER > > das passt bei recht vielen i3-Clones... > Da hast du Recht. Irgendwie habe ich einen Fehler beim Abspeichern der *Configuration.h* gemacht. Hatte das ausgewählt, indem ich die // vor dem #define weggenommen hatte und hier davor gesetzt hatte.
1 | #define DISPLAY_CHARSET_HD44780 JAPANESE
|
1 | //=============================================================================
|
2 | //======================= LCD / Controller Selection =======================
|
3 | //========================= (Graphical LCDs) ========================
|
4 | //=============================================================================
|
5 | |
6 | //
|
7 | // CONTROLLER TYPE: Graphical 128x64 (DOGM)
|
8 | //
|
9 | // IMPORTANT: The U8glib library is required for Graphical Display!
|
10 | // https://github.com/olikraus/U8glib_Arduino
|
11 | //
|
12 | |
13 | //
|
14 | // RepRapDiscount FULL GRAPHIC Smart Controller
|
15 | // http://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller
|
16 | //
|
17 | //#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
|
Werde mir im Laufe des Tages nochmal die *Configuration.h* vornehmen und morgen berichten. Bernd_Stein
Bernd S. schrieb: > Werde mir im Laufe des Tages nochmal die *Configuration.h* vornehmen und > morgen berichten. Nimm Dir ein leckeres Getränk und Zeit. Und parallel zur Configuration.h liest Du noch die supergute Dokumentation: http://marlinfw.org/docs/configuration/configuration.html Und pass auf, das Du nicht aus Versehen eine Configuration.h aus dem Example-Verzeichnis offen hast. (Wobei Du dort sicher eine gute Grundkonfiguration für Deinen Drucker findest.)
Angehängte Dateien:
-

U8glib.jpg
130 KB

Tim schrieb: > Und parallel zur Configuration.h liest Du noch die supergute > Dokumentation: > http://marlinfw.org/docs/configuration/configuration.html > Supergut wäre sie in meiner Muttersprache. So macht das alles irgendwie keinen Spaß. Immer wieder ein anderes Problem. Wo muss ich die *U8glib.h* denn reinpacken ? https://www.arduinolibraries.info/libraries/u8glib Bernd_Stein
Bernd S. schrieb: > Supergut wäre sie in meiner Muttersprache. Sei froh, das Du für innovative Technologie noch nicht chinesisch brauchst. Bernd S. schrieb: > Wo muss ich die *U8glib.h* denn reinpacken ? https://github.com/olikraus/U8glib_Arduino/blob/master/extras/INSTALL.TXT Für Dich mal durch den Übersetzer geschickt:
1 | ... |
2 | Installieren Sie Anweisungen für die Arduino-Umgebung. |
3 | |
4 | 1. Starten Sie die Arduino IDE |
5 | 2. Importieren Sie die Bibliothek in der Arduino-IDE aus dem Menü "Bibliothek hinzufügen". |
6 | |
7 | Alternative Installationsanweisungen für die Arduino-Umgebung |
8 | |
9 | 1. Entpacken Sie u8glib_arduino_vX.XX.zip in den Ordner "libraries" des |
10 | Arduino Installationsverzeichnis |
11 | 2. Starten Sie die Arduino IDE |
12 | ... |
Bernd S. schrieb: > Ich habe mir die Marlin-Version 1.1.9 heruntergeladen. > Das AS7 soll ja einige Vorteile gegenüber der Arduino-IDE haben, wie > z.B. DebugWire. Deshalb würde ich gerne die AS7-IDE nutzen. Bist Du Dir sicher, das Du die Marlin-Firmware debuggen willst? Inzwischen bist Du ja offensichtlich auf die Arduino-IDE umgeschwenkt. Bernd S. schrieb: > das 1.4 und das *RepRapDiscount Full Graphic Smart > Controller* Display. > > Habe auf meinem TRONXY X3A ein MELZI-Board 2.0_V5 mit der MARLIN > Version V1.0. Und da ich gerne die Trinamic SilentStep-Module wegen dem > Stealth-Modus Nur nochmal zum Rekapitulieren, die Hardware besteht aus: - einem TRONXY X3A, ursprünglich mit einem Melzi-Board 2.0 V5 - zukünftig mit einem RAMPS 1.4 + Arduino Mega 2560 und - einem RepRapDiscount Full Graphic Smart Controller Ist das Display soeins hier?!?: https://reprap.org/wiki/MKS_MINI_12864
Tim schrieb: > Ist das Display soeins hier?!?: > https://reprap.org/wiki/MKS_MINI_12864 > Alles bisher richtig, bis auf das oben. Wäre aber eigentlich besser gewesen, da es durch die Bedienelemente auf der rechten Seite etwas schmaler ist als das, was ich nutze, wo dies unterhalb vom Display angeordnet ist. https://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller Nachdem ich deine DAU-Anweisung in etwas abgewandelter Form ausgeführt habe, funktioniert es jetzt endlich. Danke nochmal hierfür. Habe erst die besagte ZIP-Datei in den Ordner "libraries" des Arduino Installationsverzeichnises kopiert und dort extrahiert, dann aber in der Arduino-IDE unter Sketch => Bibliothek einbinden den Menüpunkt .ZIP-Bibliothek hinzufügen... benutzt. Vermute ganz stark, das ich wohl in den nächsten Jahren die ATMEL STUDIO-IDE nicht zum debuggen von Arduinofirmware nutzen werde, da mir das alles im Moment zu kompliziert ist zu verstehen, was ich dafür alles wirklich brauche, um beispielswiese dieses Marlin-Projekt komplett debuggen zu können. Und da AS7 eh die Installation von der Arduino-IDE benötigt und ich gar keinen Plan von der C bzw. C++ und der abgewandelten C++ Programmierung bei Arduino habe, bleibe ich wohl bei der Arduino-IDE, wenn das AS sich da nicht weitereintwickelt. Nun warte ich darauf das Watterott sein neuen SilentStepStick mit dem TMC5160 herausbringt. https://www.trinamic.com/products/integrated-circuits/details/tmc5160/ Bernd_Stein
Bernd S. schrieb: > Nun warte ich darauf das Watterott sein neuen SilentStepStick mit dem > TMC5160 herausbringt. Aber, sowas geht doch nicht, die zu verwenden hält die Zukunft auf, weil dafür erst recht kein 32-Bit Controller benötigt wird. :-)
Rudolph R. schrieb: > Aber, sowas geht doch nicht, die zu verwenden hält die Zukunft auf, weil > dafür erst recht kein 32-Bit Controller benötigt wird. :-) > Ich bin an diesen, nur wegen dem höheren Strom gegenüber TMC2100 und TMC2130 interessiert. Dachte es ist evtl. für den Einen oder Anderen zu gebrauchen, deshalb lade ich mal meine *Configuration.h* hier hoch. Lieber wär mir natürlich die Hex-Datei ( die Datei, die den ATmega 2560 geflasht wird ), aber da weiß ich nicht wo ich diese finde. Bernd_Stein
Bernd S. schrieb: > Ich bin an diesen, nur wegen dem höheren Strom gegenüber TMC2100 und > TMC2130 interessiert. Wofür brauchst Du denn den höheren Strom? Hast Du Schrittverluste oder willst Du schneller drucken? > Dachte es ist evtl. für den Einen oder Anderen zu gebrauchen, deshalb > lade ich mal meine *Configuration.h* hier hoch. Ich hab's mal mit meiner Configuration.h verglichen und folgende Dinge sind mir aufgefallen: - #define PIDTEMP PID ist aktiviert, aber es sind keine individuelle Werte hinterlegt (DEFAULT_Kp, DEFAULT_Ki, DEFAULT_Kd). Im EEPROM können sie nicht sein, da der EEPROM deaktiviert ist: //#define EEPROM_SETTINGS Nachdem Du die Werte für Dein System z.B. mit "M303 E0 S220 C8" bestimmt hast, gibt es zwei Möglichkeiten: 1. in der Configuration.h als DEFAULT_Kp usw. eintragen, compilieren und flashen oder 2. EEPROM aktivieren und mit M500 dort abspeichern - Bei DEFAULT_AXIS_STEPS_PER_UNIT, DEFAULT_MAX_FEEDRATE und DEFAULT_MAX_ACCELERATION stehen die Standardwerte. Wenn die bei Dir passen, ist alles gut. Bei mir steht da fast überall was anderes. - Eine Z-Probe hast Du nicht dran, oder? Das war bei mir die Nachrüstung, die am meisten zur Entspannung beigetragen hat. Der verbaute Z-Endlagenschalter hatte zuviel Spiel und damit war die erste Lage zu dünn oder zu dick und hat nur durch Zufall mal gehalten. - #define LCD_LANGUAGE en Da kannst Du die Displaysprache noch auf Deutsch ändern. > Lieber wär mir natürlich > die Hex-Datei ( die Datei, die den ATmega 2560 geflasht wird ), aber da > weiß ich nicht wo ich diese finde. Die ist irgendwo im Build-Ordner von Arduion vergraben. In der IDE gibt es auch eine Export-Funktion (die bei mir nicht funktioniert). Aber wer sollte Deine Hex-Datei ohne Prüfmöglichkeit bei sich einspielen wollen? Wie groß ist Deine Firmware jetzt? Dürften so um die 100 kByte sein, oder? Hast Du die TMC2130 schon im Einsatz?
>> Bernd_Stein. schrieb: >> Ich bin an diesen, nur wegen dem höheren Strom gegenüber TMC2100 und >> TMC2130 interessiert. >> Tim schrieb: > Wofür brauchst Du denn den höheren Strom? Hast Du Schrittverluste oder > willst Du schneller drucken? > Es ist immer von Vorteil noch Stromreserven zu haben, wegen der Verlässlichkeit. Wenn ich hierdurch auch noch schneller drucken kann - um so besser. Durch die externen MOSFET's verspreche ich mir eine geringere thermische Belastung des Treiberchips und somit ist auch wieder weniger die Gefahr von Schrittverlusten gegeben. Das alles ist natürlich vom Preis abhängig. Falls der TMC5160 versentlich teurer als der 2130 sein sollte, werde ich den 2130 nehmen. Im Moment habe ich noch keine Treiber. Wollte jedoch schon alles vorbereiten, deshalb war der erste Schritt das Display zum Laufen zu bekommen. Tim schrieb: > - #define PIDTEMP > PID ist aktiviert, aber es sind keine individuelle Werte hinterlegt > (DEFAULT_Kp, DEFAULT_Ki, DEFAULT_Kd). > Im EEPROM können sie nicht sein, da der EEPROM deaktiviert ist: > //#define EEPROM_SETTINGS > > Nachdem Du die Werte für Dein System z.B. mit "M303 E0 S220 C8" bestimmt > hast, gibt es zwei Möglichkeiten: > 1. in der Configuration.h als DEFAULT_Kp usw. eintragen, compilieren > und flashen oder > 2. EEPROM aktivieren und mit M500 dort abspeichern > Der Nächste Schritt ist, den e3D Vulcano HOTEND-V6-Clone mal zu testen, d.h. die eingestellte Temperatur mit der Tatsächlichen zu vergleichen. Somit kommst du mir mit deiner Feststellung passend zuvor. Tim schrieb: > - Bei DEFAULT_AXIS_STEPS_PER_UNIT, DEFAULT_MAX_FEEDRATE und > DEFAULT_MAX_ACCELERATION stehen die Standardwerte. Wenn die bei Dir > passen, ist alles gut. Bei mir steht da fast überall was anderes. > Das wird sicherlich ein Problem werden, wenn ich die SilentStepSticks testen werde. Tim schrieb: > - Eine Z-Probe hast Du nicht dran, oder? Das war bei mir die > Nachrüstung, die am meisten zur Entspannung beigetragen hat. Der > verbaute Z-Endlagenschalter hatte zuviel Spiel und damit war die erste > Lage zu dünn oder zu dick und hat nur durch Zufall mal gehalten. > Nein habe ich nicht. Ich habe noch den orginal Z-Achsennäherungsschalter dran. Ah, das scheint dann bei mir das Problem zu sein, warum manchmal die erste Lage solche Probleme bereitet, indem sie einfach zu dünn ist. Aber es ist selten der Fall, das diese auf meiner FR4-Auflage nicht haftet. Tim schrieb: > - #define LCD_LANGUAGE en > Da kannst Du die Displaysprache noch auf Deutsch ändern. > Ich bevorzuge zwar meine Muttersprache, aber ich denke es ist für einen Parametervergleich besser dies auf englisch zu lassen >> Bernd_Stein. schrieb: >> Lieber wär mir natürlich >> die Hex-Datei ( die Datei, die den ATmega 2560 geflasht wird ), aber da >> weiß ich nicht wo ich diese finde. Tim schrieb: > Die ist irgendwo im Build-Ordner von Arduion vergraben. In der IDE gibt > es auch eine Export-Funktion (die bei mir nicht funktioniert). > Aber wer sollte Deine Hex-Datei ohne Prüfmöglichkeit bei sich einspielen > wollen? > Damit sie einfach schnell schon mal das Display zum Laufen bekommen können, was ja mit deinem vorher genannten problematisch ist, weil die Strippen anders zu verdrahten sind. Und so ein Display ist wirklich schlecht zu debuggen. Entweder es funktioniert oder man muss sich das Timming usw. genau anschauen und verstehen. Tim schrieb: > Wie groß ist Deine Firmware jetzt? Dürften so um die 100 kByte sein, > oder? > Wie kann ich das jetzt feststellen ohne es neu zu kompilieren, denn das möcte ich vermeiden, weil es relativ lange bei mir dauert. Tim schrieb: > Hast Du die TMC2130 schon im Einsatz? > Nein. Bernd_Stein
Hier mal was, was in etwa zur Threadüberschrift passt : https://www.youtube.com/watch?v=OYYeADptDdA Bernd_Stein
Angehängte Dateien:
-

Volcano_IMG_9682.jpg
230 KB -

Volcano_nackt_IMG_9680.jpg
240 KB -

Volcano_TemperaturmessungIMG_9695.jpg
250 KB


Tim schrieb: > - #define PIDTEMP > PID ist aktiviert, aber es sind keine individuelle Werte hinterlegt > (DEFAULT_Kp, DEFAULT_Ki, DEFAULT_Kd). > Im EEPROM können sie nicht sein, da der EEPROM deaktiviert ist: > //#define EEPROM_SETTINGS > > Nachdem Du die Werte für Dein System z.B. mit "M303 E0 S220 C8" bestimmt > hast, gibt es zwei Möglichkeiten: > 1. in der Configuration.h als DEFAULT_Kp usw. eintragen, compilieren > und flashen oder > 2. EEPROM aktivieren und mit M500 dort abspeichern > Ich habe nichts geändert und mal gemessen, wie sich die angezeigte Temperatur zu meinem Temperaturmessgerät verhält. Der gemessene Wert ist immer niedriger, das könnte an der schlechten Adaptierung der PT100-Pille liegen, welche in der Schlinge des 0,35mm Kupferlackdrahtes sitzt und im Spalt von Düse und dem Hotendblock. TRONXY X3A: Display / °C # Messung / °C # Delta / K 190 # 174 # 16 200 # 184 # 16 210 # 192 # 18 220 # 200 # 20 230 # 208 # 22 240 # 217 # 23 250 # 225 # 25 Volcano V6-Clone mit orginal 0,8mm E3D-Kupferdüse: 190 # 181 # 9 200 # 191 # 9 210 # 198 # 12 220 # 207 # 13 230 # 216 # 14 240 # 224 # 16 250 # 231 # 19 Die leicht ockerfabene Masse ist weiße Wärmeleitpaste, die ich vollflächig auf das Gewinde der Düse aufgebracht habe und welche nun ausgekwollen ist. Bernd_Stein
Höherer Strom bedeutet auch mehr Wärme an den Motoren. Das sollte man nicht unterschätzen. Der Druck kann schon mal 2 Tage dauern. Mit der Temperaturanzeige würde ich mir sowieso keinen Kopf machen. Jedes Filament verhält sich anders und du musst einen Probedruck machen.
Cihan S. schrieb: > Höherer Strom bedeutet auch mehr Wärme an den Motoren. Das sollte man > nicht unterschätzen. Der Druck kann schon mal 2 Tage dauern. > Es geht nicht darum die Stepper mit einen höheren Strom zu beaufschlagen, sondern diesen bei Bedarf zur Verfügung zu haben. Cihan S. schrieb: > Mit der Temperaturanzeige würde ich mir sowieso keinen Kopf machen. > Jedes Filament verhält sich anders und du musst einen Probedruck machen. > Genau, dafür gibt es ja die Temp Tower, wenn man es mal so genau braucht. https://www.youtube.com/watch?v=4WdPN3aauaw Bernd_Stein
:
Bearbeitet durch User
Ach die Temperaturmessungen habe ich hiermit vorgenommen : Beitrag "Hochtemperaturmessgerät TM902-C von Innen" Bernd_Stein
Jetzt ein bischen was anderes, weil es mit dem ATMEL Studio 7 zusammenhängt. Da ein Projektstand zufriedenstellend war, wollte ich diesen sicher haben. Ich habe also ein neues Projekt erstellt, dem ich eine höhere Nummer verpasst habe. Unter File -> New -> Project => TWI_3 ( vorher TWI_2 ) Aus dem Ordner des alten Projekts habe ich alle include-Dateien kopiert und in den Ordner TWI_3 kopiert. Build TWI_3 ergibt die folgenden Fehlermeldungen. Was habe ich verkehrt gemacht ? ------ Build started: Project: TWI_3, Configuration: Debug AVR ------ Build started. Project "TWI_3.asmproj" (default targets): Target "PreBuildEvent" skipped, due to false condition; ('$(PreBuildEvent)'!='') was evaluated as (''!=''). Target "CoreBuild" in file "G:\AVR Studio\7.0\Build1188\7.0\Vs\Assembler.targets" from project "E:\Projekte AVR-Studio\ATmega\ATmega88\TWI_3\TWI_3\TWI_3.asmproj" (target "Build" depends on it): Task "RunAssemblerTask" G:\AVR Studio\7.0\Build1188\7.0\toolchain\avr8\avrassembler\avrasm2.exe -fI -o "TWI_3.hex" -m "TWI_3.map" -l "TWI_3.lss" -S "TWI_3.tmp" -W+ie -I"G:/AVR Studio\7.0\Build1188\7.0\Packs\atmel\ATmega_DFP\1.2.150\avrasm\inc" -im88padef.inc -d "E:\Projekte AVR-Studio\ATmega\ATmega88\TWI_3\TWI_3\Debug\TWI_3.obj" "" -I "G:\AVR Studio\7.0\Build1188\7.0\toolchain\avr8\avrassembler\Include" AVRASM: AVR macro assembler 2.2.7 (build 69 Jul 26 2017 16:25:06) Copyright (C) 1995-2017 ATMEL Corporation : Could not open source file: Invalid argument Assembly failed, 1 errors, 0 warnings Done executing task "RunAssemblerTask" -- FAILED. Done building target "CoreBuild" in project "TWI_3.asmproj" -- FAILED. Done building project "TWI_3.asmproj" -- FAILED. Build FAILED. ========== Build: 0 succeeded or up-to-date, 1 failed, 0 skipped ========== Bernd_Stein
Bernd S. schrieb: > : Could not open source file: Invalid argument Sind denn alle nötigen Quelldateien (=Sourcen) schon im neuen Projekt hinzugefügt worden?
Angehängte Dateien:
-

Melzi_2.0_Bedtemperatur.jpg
65 KB -

Melzi_2.0_Bedtemperatur_brd_con.jpg
100 KB -

Melzi_2.0_Bedtemperatur_brd.jpg
310 KB -

Melzi__C_31.jpg
240 KB -

Ist_das_die_Ursache.jpg
230 KB -

Das_vielleicht.jpg
280 KB -

Das_wohl_nicht.jpg
230 KB -

Noe.jpg
230 KB -

Auch_nicht.jpg
230 KB -

Haeh.jpg
420 KB -

Toll_gemacht.jpg
240 KB




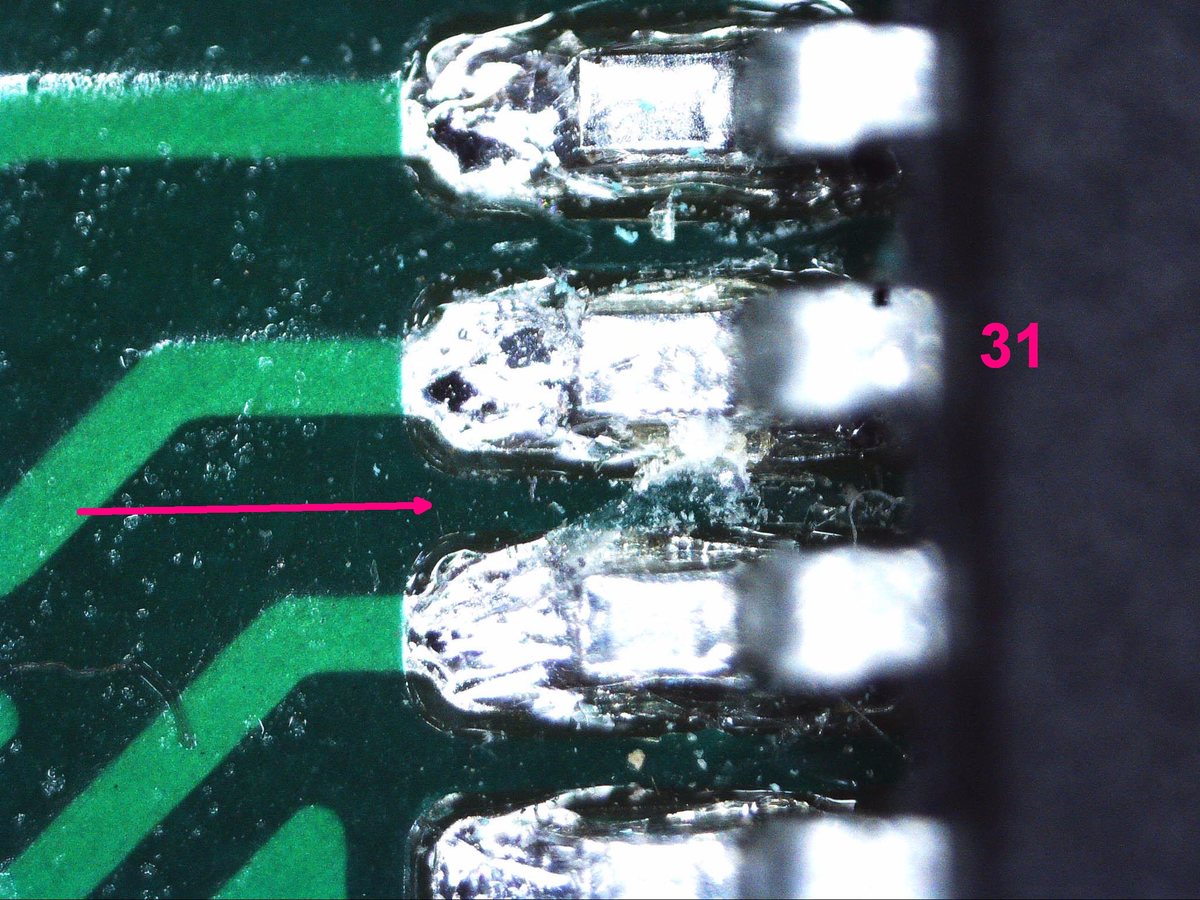




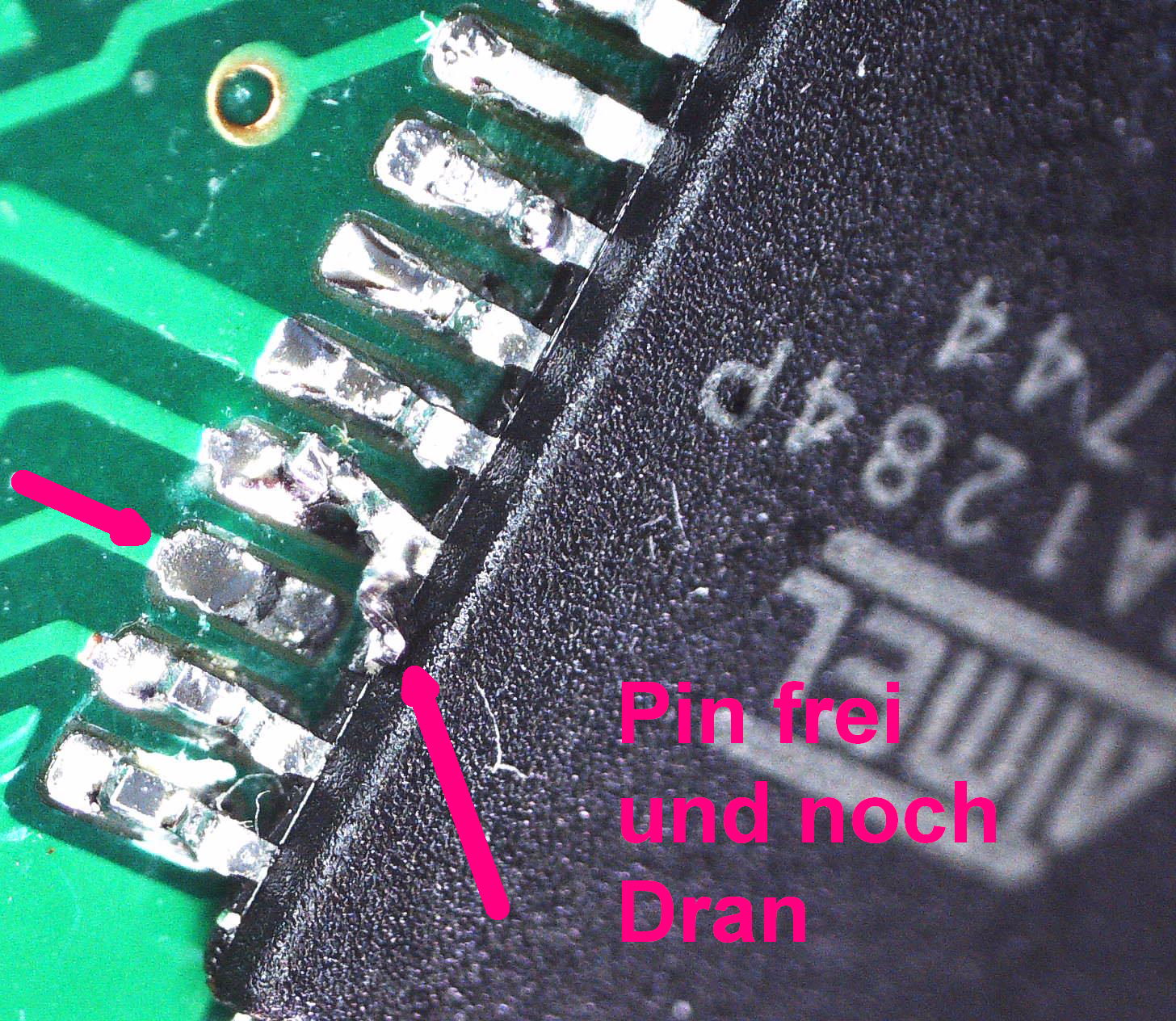

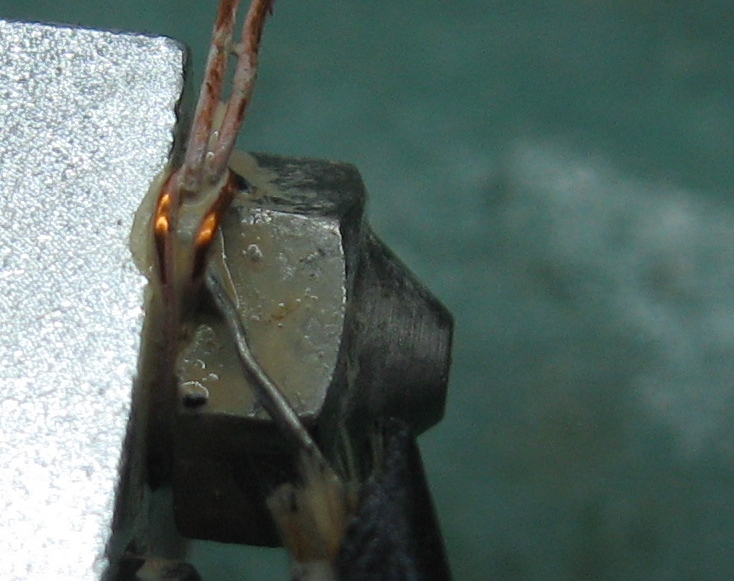
Warum hat der µC Pin 31 ( AtMega 1284P ) einen gemessenen Widerstand von 180 Ohm gegen GND ? Angefangen hat es, dass die Bed-Temperatur mit um die 125°C angezeigt wurde. Bed-Thermistor gegen einen 100k-Poti getauscht, aber die Temperaturanzeige läßt sich zwar auf über 300°C einstellen, jedoch kann ich keine kleineren Temparuren als um die 120°C einstellen. Alles so um die 2,xx Volt. Komme also nicht über 2,xx Volt. ( Je höher die Temperatur, desto kleiner die Spannung ). R4 ( 4k7 ) in der Schaltung mit 1k6 gemessen. Anstatt den Widerstand auszulöten habe ich die Leiterbahn unterbrochen und siehe da, alles OK mit dem R4. C8 ausgelötet, aber immer noch das gleiche Problem. *Nach der Unterbrechung, also zum µC hin, messe ich ca. 180 Ohm am µC-Pin 31 gegen GND ???* Schlußendlich vom µC den Pin 31 hochgebogen, aber immer noch diese ominösen 180 Ohm an diesen Pin. Leider ist er jetzt abgebrochen :-( Evtl. könnte man da was aufdremeln und einen Fädeldraht anlöten, aber ohne Mikroskop vergeht mir da die Lust. Schaltplanquelle : https://reprap.org/wiki/Melzi#Melzi_Version_2.0 Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Schaltplanquelle : Puhhh ... wenn da Motorströme so nahe am Controller "vorbeifliessen" dann kann die ganze Schaltung eigentlich nicht zuverlässig funktionieren. Vernünftige Abblockung am Controller scheint es auch nicht zu geben (ist ja alles reiner Luxus). Grundsätzlich fehlt es da an einer sauberen Trennung zwischen empfindlicher CMOS-Controller-Elektronik und Leistungslelekronik. Ich hätte da keine Lust die Fehlersuche auch nur zu beginnen. Sorry für die nicht der Erwartungshaltung entsprechenden Aussage.
Sherlock Holmes schrieb: > Ich hätte da keine Lust die Fehlersuche auch nur zu beginnen. > Sorry für die nicht der Erwartungshaltung entsprechenden > Aussage > Ich steigere mich da immer rein. Glaubte zu Beginn an eine Hochohmigkeit im oberen Spannungsteiler, also in Reihe zu R4. Dann wegen der 180 Ohm im unteren Teil, dass es irgendwo eine nichtgewollte schlechte Verbindung zu GND gibt. Mir ist nur bekannt, das Der ADC des µC einen ca. 10k Eingangswiderstand besitzt, aber das man ca. 180 Ohm gegen GND hat, scheint ein Defekt zu sein. Fragt sich nur wie das Geschehen konnte. Bernd_Stein
So - ein neuer, nackter AtMega1284P-AU hat gegen GND ( Pin 28 ) auf jedenfall einen Widerstand im Megaohmbereich. Pin 33=14 M, 32=15M, 31=14M, 30=15M, 29=15M, 27=6M, 26=14M, 25=14M, 24=8M, 23=8M. Werde jetzt mal gucken, ob ich den defekten mit meinem einstellbarem Heißluftfön von der Platine bekomme ohne andere Bauteile mit abzulöten oder zu zerstören. Beitrag "TQFP 100 entlöten" Bernd_Stein
Mit der spitz abgeänderten Düse und Alufolie mit ausschnitt für den IC wie in dem Link sollte es am besten funktionieren.
Angehängte Dateien:
-

SW_kann_nicht.jpg
10 KB

Philipp K. schrieb: > Mit der spitz abgeänderten Düse und Alufolie mit ausschnitt für den IC > wie in dem Link sollte es am besten funktionieren. > Ja mit der Düse aus dem Link hat es tatsächlich funktioniert. Die Lücken habe ich noch von innen und außen mit so einer Knetmasse aufgefüllt, die nach dem erhärten Steinhart wird. Vorher etwas geübt um die Temperatur und Luftmenge richtig einzustellen. Anstatt Alufolie habe ich Alukaschiertes Klebeband genommen. Hätte gerne Fotos gezeigt, aber meine dnt DigiMicro Profi USB-Mikroskop-Kamera bzw. eher die Software will nicht mehr ihren Dienst verrichten. Vielleicht kennt ja jemand eine andere Software, die mit diesem USB-Mikroskop zusammen arbeitet. Jetzt werde ich erstmal den neuen µC auflöten und gucken, wie ich da die neuste MARLIN Firmware flashen kann. Bernd_Stein
Angehängte Dateien:

Möchte mein *MELZI-Board 2.0_V5* mit einer neuen Firmware flashen. Der Programmer ist der *ATMEL-ICE.* Wo finde ich die von der Arduino-IDE erstellte Hex-Datei ? Bernd_Stein
Mach dazu bitte einen eigenen Thread auf, sonst blickt hier bald keiner mehr durch. Ich schreibe Dir dann auch die Antwort, die ich bereits kenne. Es wäre schön, wenn du dann auch auf den unterschied zwischen Marlin Board und Melzin Board eingehen könntest - das irritiert mich ein wenig (wohl auch, weil ich beide Produkte nicht kenne).
Angehängte Dateien:
-

Arduino_Ausfuehrliche_Kompilierung.jpg
80 KB -

Arduino_hex_elf.png
12 KB -

AS7_Flashen.jpg
88 KB



Stefanus F. schrieb: > Mach dazu bitte einen eigenen Thread auf, sonst blickt hier bald keiner > mehr durch. > Das ist meistens vergebene Liebesmüh. Es kommen immer irgendwelche Trolle, die gar nichts zur Threadüberschrift bzw. der Frage beitragen und ich habe dann nur eine lange Liste von Datenmüll-Threads in meiner Liste von "Eigene Beiträge". Stefanus F. schrieb: > Es wäre schön, wenn du dann auch auf den unterschied zwischen > Marlin Board und Melzin Board eingehen könntest - das irritiert mich ein > wenig (wohl auch, weil ich beide Produkte nicht kenne). > Ich blicke da ja auch nicht ganz durch. Es geht halt um 3D-Drucker-Hardware. Das MELZI-Board 2.0_V5 ist in meinem TRONXY X3A Drucker verbaut und wird mit der MARLIN Firmware betrieben. Da die Version 1.0 immer wieder mal abstürzte ist jetzt eine gute Gelegenheit auf Version 1.1.9 upzudaten. Hab jetzt über 2Std. damit verbracht, diese Scheiß Hex-Datei zu finden. Lange, schwer verständliche Rede, kurzer Sinn hat mir dann doch geholfen : https://www.youtube.com/watch?v=PEhqzvO3egk Also einfach in der Arduino-IDE unter Datei -> Voreinstellungen das Häkchen bei Ausführliche Ausgabe wärhrend : kompilieren setzen und dann am Ende nach dem Pfad suchchen der .hex beinhaltet. Diesen kopieren und in das Feld im ATMEL STUDIO 7 einfügen. Also einfach das AS7 starten, auf den Blitz klicken und halt die weiteren Einstellungen vornehmen. Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > [Bilder von vermurkstem Board] > > Leider ist er jetzt abgebrochen :-( Ich hätte das Board umgehend zurückgehen oder den Kaufpreis erstatten lassen. Du bist evtl noch jünger als ich und hast noch genug Energie, aber ich hab von sowas mittlerweile die Nase gestrichen voll, auch beruflich bedingt: Wenn ich eine Platine auf den Tisch bekomme will ich daß es vernünftig gelötet und elektrisch 100% OK ist. Wenn ich sowas wie in den Bildern sehe geht mir schon wieder der Hut hoch (obwohl momentan noch im Urlaub) und ich stelle mir vor wie ich das Board dem Verursacher persönlich um die Ohren hauen würde. Für sowas hätt ich einfach keine Zeit und keine Kraft mehr. Und bei gekauften Boards schon erst Recht, die sollen zumindest zum Zeitpunkt der Lieferung mal funktioniert haben, kaputt machen kann ich sie auch selber.
Bernd K. schrieb: > Ich hätte das Board umgehend zurückgehen oder den Kaufpreis erstatten > lassen. > Das Board funktionierte ja eine ganze Weile. Ich selbst habe es dann in der Art "zerstört", weil ich nach dem Fehler bei der Bedtemperatur gesucht habe. Mittlerweile habe ich ja das MELZI-Board 2.0_V5 mit dem neuen µC und der MARLIN Version 1.1.9 in Betrieb, aber die Taster reagieren total träge ( ca. 7 Sekunden gedrückt halten ). Habe die beiden Configurationsdateien aus dem example_configurations Ordner für den TRONXY X3A eingefügt ( siehe Anhang ). Die FUSES sind noch im Ursprungszustand EX = $FF High = $99 Low = $62 Wenn ich es richtig gedeutet habe, werden die fünf Taster über den ADC des µC eingelesen. Was kann die Ursache für dieses stark verzögerte reagieren der Taster sein ? Bernd_Stein
Bernd S. schrieb: > Ich selbst habe es dann in der Art "zerstört" Ja, solche Pins lassen sich immer nur genau einmal biegen (nämlich VER-biegen), zurück-biegen ist dann nicht mehr. Ich hätte wahrscheinlich versucht ein Stückchen Draht hinzulöten.
Bernd S. schrieb: > Was kann die Ursache für dieses stark verzögerte reagieren der Taster > sein ? > Ich hatte es ja vermutet, aber nicht getraut an den FUSE-Bits herumzuwerkeln. Also erstmal die FUSE-Low-Bits auf $D6 gesetzt und das Problem ist aus der Welt. Wenn es weitere Probleme gibt, was ich bei der Bed-Temperatur erahne, da diese mit 1°C angezeigt wird, werde ich noch in den FUSE-High-Bits, JTAGEN rausnehmen bzw. deaktivieren ( unprogrammed ). An den BOOTSZ1 und BOOTRST möchte ich erstmal nicht rumfummeln, denn die sind bestimmt für den Bootloader, den ich erstmal nicht brauche. Die Informationen, dass die FUSE-Bits folgendermaßen aussehen, EX = $FF High = $DC Low = $D6 habe ich aus diesem Video entnommen : https://ru-clip.net/video/MCNz3QOsYpQ/tronxy-x3-%D0%BF%D0%BE%D0%B4%D0%B3%D0%BE%D1%82%D0%BE%D0%B2%D0%BA%D0%B0-%D0%B8-%D0%BF%D1%80%D0%BE%D1%88%D0%B8%D0%B2%D0%BA%D0%B0-marlin-firmware-melzi-2-0-v5.html?fb_comment_id=787150454742500_831837980273747 Bernd_Stein
Bernd S. schrieb: > Wenn es weitere Probleme gibt, was ich bei der Bed-Temperatur erahne... > Das lag daran, dass ich bei der früheren Fehlersuche die Leiterbahn zum µC-Pin 31 unterbrochen hatte, welcher für die Messung der BED-Temperatur zuständig ist. Wieder durchverbunden -> BED-Temperatur jetzt OK. > Stefanus F. schrieb: >> Es wäre schön, wenn du dann auch auf den unterschied zwischen >> Marlin Board und Melzin Board eingehen könntest - das irritiert mich ein >> wenig (wohl auch, weil ich beide Produkte nicht kenne). >> > Ich blicke da ja auch nicht ganz durch. Es geht halt um > 3D-Drucker-Hardware. > Das MELZI-Board ist wohl mit dem Sanguio-Board kompatibel, deshalb auch diese Einstellung in der Boards.h in der Arduino-IDE. Bei der Marlinversion 1.1.9 ist zu beachten, dass jetzt per Tastendruck auf die mittlere Taste dass entsprechende Menü ausgewählt wird. Nicht mehr die nach rechts Taste. Ist blöd, aber was will man machen. Noch blöder ist, dass sich im Menü *Control -> Motion -> Steps/mm* die Werte nur um 0,01 verändern lassen. Zur Zeit habe ich das Problem, das die X & Y-Achse sich nur in eine Richtung über Prepare -> Move axis, per Tasten steuern läßt. Die Z-Achse ist davon aber unberührt. Hier noch mal was in meiner Muttersprache zu MARLIN : https://reprap.org/wiki/Marlin/de Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Zur Zeit habe ich das Problem, das die X & Y-Achse sich nur in eine > Richtung über Prepare -> Move axis, per Tasten steuern läßt. > Da ich mittlerweile denke mit diesem speziellen Problem hier falsch zu sein, geht es hier weiter : https://drucktipps3d.de/forum/topic/tronxy-x3a-achsen-ueber-die-taster-verfahren/ Bernd_Stein
Lötbrücke beim neuen IC?
Angehängte Dateien:

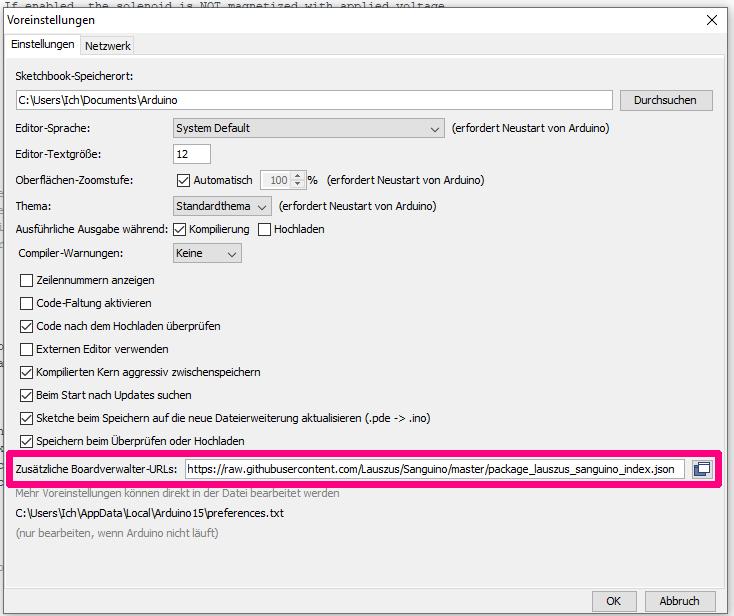
Ich habe Stunden damit verbracht im www die URL wieder zu finden. Nun habe ich einfach von einem alten Rechner diese URL auf einen USB-Stick kopiert und hinterlege sie hier. Das Problem war, dass das Sanguino-Board unter Werkzeuge -> Board nicht auftauchte, was ich für das MELZI-Board benötige. Also unter Datei -> Voreinstellungen, diese URL hineinkopieren : https://raw.githubusercontent.com/Lauszus/Sanguino/master/package_lauszus_sanguino_index.json Bernd_Stein
Bernd S. schrieb: > Ich habe Stunden damit verbracht im www die URL wieder zu finden. Beim nächsten mal suche einfach nach "sanguino arduino", das erste Ergebnis enthält die richtige URL.
Angehängte Dateien:
-

Arduino-IDE_MELZ-Board.jpg
200 KB

Da ist wieder was falsch gelaufen. Die richtigen Einstellungen und die zu kopierende URL im Anhang. Bernd_Stein
Angehängte Dateien:
-

Arduino-IDE_Hex-Datei.jpg
13 KB -

AppData_einblenden.jpg
79 KB -

AS7_Arduino_Hex-Datei.jpg
55 KB -

Was_ist_mit_Verify_los..jpg
58 KB




Weil das alles auf einem neuen Rechner so viel Spaß macht. Wo ist denn jetzt der Ordner AppData ? Der muss erst eingeblendet werden. Siehe Screenshots. Und dann kommt der Dank für all die Mühen. Was ist mit meinem Verify also mit dem Vergleichen los ? Das macht schon bei den FUSE-Bits Probleme. https://www.roboternetz.de/community/threads/73606-Warum-kann-ich-bei-den-FUSES-High-das-Bit-BOOTSZ0-nicht-mehr-r%C3%BCcksetzen-%28programmed%29?p=653282&viewfull=1#post653282 Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Wo ist denn jetzt der Ordner AppData ? > Der muss erst eingeblendet werden. Das der Order ausgeblendet wird, ist jetzt nicht wirklich neu. Du brauchst ihn nicht einzublenden, du kannst den Pfad einfach eintippen.
Angehängte Dateien:
-

CoolingTech_USB300X.jpg
81 KB

Bernd S. schrieb: > Hätte gerne Fotos gezeigt, aber meine dnt DigiMicro Profi > USB-Mikroskop-Kamera bzw. eher die Software will nicht mehr ihren Dienst > verrichten. > > Vielleicht kennt ja jemand eine andere Software, die mit diesem > USB-Mikroskop zusammen arbeitet. > Auch mein neues wollte seinen Dienst unter Win10Pro nicht tun und bin nach einer Weile des Suchens hier drauf gestossen und jetzt geht diese : https://www.theimagingsource.de/support/software-f%C3%BCr-windows/ger%C3%A4tetreiber/icwdmuvccamtis/ Bernd_Stein
:
Bearbeitet durch User
Hallo, ich verstehe nicht warum man den Sketch nicht erstmal mit der Arduino IDE flasht. Paar Klicks und fertig. Für AS das Plugin installieren. Auch paar Klicks und fertig. Dein DebugWire kannste ehe vergessen, weil das nicht unterstützt wird. Du hättest mit AS nur einen komfortableren Editor. Die Einfachheit hat jedoch auch seine Vorteile. Falls du den Bootloader noch nicht gekillt hast ist immer noch alles einfach möglich. Die IDE kümmert sich auch um die Fuses bei richtiger Boardauswahl. Tipp. Wenn man mit irgendwas neu anfängt sollte man mehrere Grundlagen nicht gleich alle überspringen. Siehst ja was bei rauskommt.
Bernd S. schrieb: > Was ist mit meinem Verify also mit dem Vergleichen los ? Vorab: Dieser Thread ist schon älter und ich habe nicht alles gelesen. Das Problem des Titels lässt sich leicht lösen: Mit Arduino kompilierte Binärdatei exportieren und mit Atmel Studio und einem ISP Programmer reinladen. Damit hatte ich noch nie ein Problem. Plötzlich, und das entspricht Bernd S. Problem, schlägt bei mir ebenfalls das Verifizieren fehlt. Der Quellcode läuft aber sauber auf dem uC und meine implementierten Änderungen sind geflasht (ist ja auch erfolgreich). Von daher habe ich einfach mal ignoriert, dass Verify fehlgeschlagen ist. Wüßte aber auch gerne wieso...
Sefco schrieb: > Von daher habe ich einfach mal ignoriert, dass Verify fehlgeschlagen > ist. Wüßte aber auch gerne wieso... > Bei mir scheint es mit ziemlicher Gewissheit an der SD-Card zu liegen : https://www.roboternetz.de/community/threads/73606-Warum-kann-ich-bei-den-FUSES-High-das-Bit-BOOTSZ0-nicht-mehr-r%C3%BCcksetzen-(programmed)/page2?p=653352&viewfull=1#post653352 Bernd_Stein
Angehängte Dateien:
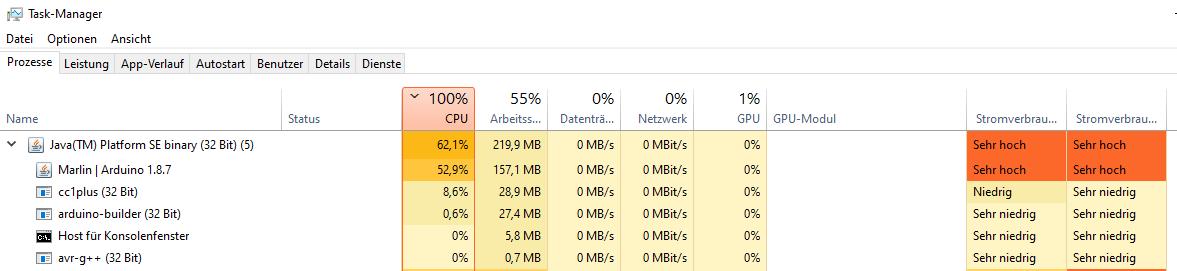
Hallo zusammen, das Hochladen der Marlin Version 2.0.5.3 über die Arduino IDE per Bootloader auf das ATmega2560-Board bremmst total meinen PC aus. Der Virenscanner schließt den Arduino-Ordner bereits aus. Win10 Pro 64-Bit ist mein Betriebssystem. Was kann noch der Grund hierfür sein ? Bernd_Stein
:
Bearbeitet durch User
Mir fällt auf, dass der g++ Compiler in deiner Prozessliste steht. Das Hochladen kommt eigentlich erst nach dem Compilieren dran. Wenn der Compiler deinen Rechner voll auslastet ist das nicht ungewöhnlich. Der hat ja auch viel zu tun und wird üblicherweise in mehreren Threads ausgeführt um alle CPU Kerne auszunutzen. Hier scheint allerdings eher die Arduino IDE viel Last zu erzeugen. Man kann von der IDE einen "Java Thread Dump" erstellen, den kann dann einer der Leute, die das Ding programmiert haben, analysieren. Da bist du hier aber im falschen Support Forum.
Angehängte Dateien:

Stefan ⛄ F. schrieb: > Hier scheint allerdings eher die Arduino IDE viel Last zu erzeugen. > Wie kann man nur so eine IDE programmieren / benutzen? Das wird ja immer schlimmer. 167 Prozesse und allein das kompilieren dauert eine Ewigkeit mit meinem PC ( 2GHz, 4Kerne-Prozessor, 8GB RAM, Win10 64-Bit ). Fürchterlich dieser Arduino-Scheiß, für ... Der Sketch verwendet 136074 Bytes (53%) des Programmspeicherplatzes... über 30 Minuten gebraucht. Bernd_Stein
Bernd S. schrieb: > Das wird ja immer schlimmer. 167 Prozesse und allein das kompilieren > dauert eine Ewigkeit mit meinem PC ( 2GHz, 4Kerne-Prozessor, 8GB RAM, > Win10 64-Bit ). Die Festplatte spielt da auch eine Rolle, ebenso ob es eine Mobile oder Desktop CPU ist.. 4 Cores sind nicht 4 Cores. auf meinem 7 Jahre alten I5 war immer alles im Nu fertig, auch nie mit der Performance Probleme gehabt. Auf dem Atom Lappie ganz anders.
Philipp K. schrieb: > Die Festplatte spielt da auch eine Rolle, ebenso ob es eine Mobile oder > Desktop CPU ist.. 4 Cores sind nicht 4 Cores. > Scheint wirklich eine Notebook CPU zu sein, obwohl ich einen Desktop-PC gekauft hatte. Der AMD A10-4655M ist ein mobiler Quad-Core-Prozessor basierend auf der Trinity-Architektur. Die in 32 Nanometer gefertigte Notebook-APU ist im Low-Voltage-Segment (LV) angesiedelt und besitzt einen 2,0 bis 2,8 GHz schnellen Prozessorteil bestehend aus zwei sogenannten Modulen. Weiterhin integriert sind die Grafikeinheit Radeon HD 7620G sowie die Northbridge samt Dual-Channel-Speichercontroller (maximal DDR3-1333). FP ist eine SSD von Samsung ( EVO 250GB ). Heißt also das die Arduino IDE nichts für Notebooks ist. Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Heißt also das die Arduino IDE nichts für Notebooks ist. Nee allgemein Kompilieren durch die schmalen Anbindungen der einzelnen komponenten North/Southbridge, die schnell wechselnden Daten werden zu langsam Transportiert. Bei Fremdbesorgung eines Towers bin ich auch schon über diese Fertig Boards mit aufgelöteten Komponenten gestolpert, Direkt zurück. Ich hatte da mal einen witzigen Workaround ausprobiert.. Arduino als Ramdisk benutzen :D Sende ich per PN
Bei mir laufen alle Compiler unter Linux erheblich schneller, als unter Windows.
Angehängte Dateien:
-

AS7_Laufwerk_Error.jpg
83 KB
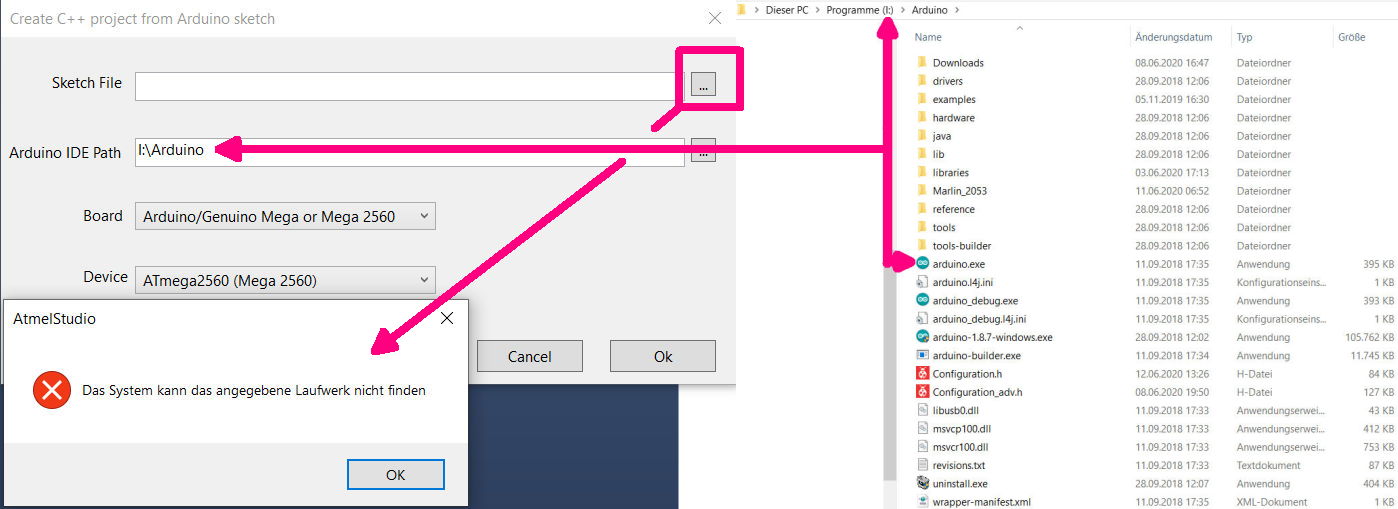
Weil mir das mit der Arduino IDE tierisch auf die Nerven geht, habe ich nach einer Lösung gesucht und bin auch fündig geworden. Nur jetzt zickt das AS7 rum, wenn ich bei Sketch File den ...-Button anklicke kommt die Meldung " Das System kann das angegebene Laufwerk nicht finden ". Das Laufwerk (:I ) ist eindeutig vorhanden und dort ist auch die Arduino.exe zu sehen. AS7 ist auf dem neusten Stand : Installed Packages: Atmel Kits - 7.0.129 Atmel Kits Version: 7.0.129 Package GUID: 6F4B8FE4-C464-4916-8B43-AC92431C1CDF Company: Atmel Installed Packages: AtmelToolchainProvider - 7.0.908 AtmelToolchainProvider Version: 7.0.908 Package GUID: AtmelToolchainProvider.Atmel.10EF9C74-D8DA-4872-85F5-D8BB3101E245 Company: Atmel Installed Packages: Data Visualizer Extension - 2.20.735 Data Visualizer Extension Version: 2.20.735 Package GUID: 25dc067d-df31-4e22-be7f-cc6a77ccc7f3 Company: Atmel Installed Packages: Microchip Gallery - 8.1.0 Microchip Gallery Version: 8.1.0 Package GUID: AtmelStudio7ExtensionManager Company: Microchip Installed Packages: Visual Assist for Atmel Studio - 10.9.2332.2 Visual Assist for Atmel Studio Version: 10.9.2332.2 Package GUID: 7997A33C-B154-4b75-B2AC658CD58C9510 Company: Whole Tomato Software Hat jemand dies mit der Marlin Firmware mal ausprobiert? https://wolles-elektronikkiste.de/debugging-fuer-den-arduino-uno-mit-atmel-studio Bernd_Stein
Möglicherweise will er hier irgendeinen Standard-Ordner (z.B. Eigene Dateien/Dokumente) öffnen und dieser existiert nicht. Ich komme darauf, weil ich früher mal all diese Standard-Ordner auf eine zweite Festplatte umkonfiguriert hatte und in einigen Programmen so ein Problem bekam - obwohl die neuen Orte richtig registriert waren. Alle Programme von MS und viele andere liefen damit ja auch wie gewünscht. Nur ein paar wenige nicht. Ich kann dazu nur empfehlen, diese Ordner wieder auf ihre Standards zurück zu konfigurieren und dann darin Verknüpfungen anlegen, die auf das Zweitlaufwerk verweisen.
Stefan ⛄ F. schrieb: > Ich kann dazu nur empfehlen, diese Ordner wieder auf ihre Standards > zurück zu konfigurieren und dann darin Verknüpfungen anlegen, die auf > das Zweitlaufwerk verweisen. > Danke, was würde ich hier nur ohne dich machen ;-) Werde also wie im Beispiel die neuste Arduino IDE hier installieren : C:\Program Files (x86)\Arduino Melde mich dann wieder. Bernd_Stein
Bernd S. schrieb: >> Ich kann dazu nur empfehlen, diese Ordner wieder auf ihre Standards >> zurück zu konfigurieren > Werde also wie im Beispiel die neuste Arduino IDE hier installieren > C:\Program Files (x86)\Arduino Du hast mich wohl missverstanden. Es ging mir dabei um die persönlichen Ordner, mit denen Datei-Öffnen Dialoge üblicherweise starte. Ich habe Dir nicht empfohlen, die IDE neu zu installieren.
Angehängte Dateien:
-

Keine_Berechtigung.png
5,9 KB

Stefan ⛄ F. schrieb: > Du hast mich wohl missverstanden. Es ging mir dabei um die persönlichen > Ordner, mit denen Datei-Öffnen Dialoge üblicherweise starte. > > Ich habe Dir nicht empfohlen, die IDE neu zu installieren. > Ich verstehe deine Empfehlung leider nicht. Mache es halt so wie in der Anleitung und eine neue Version wird hoffentlich nicht schaden. Aber da gibt es natürlich wieder immer ein Problem ( siehe Screenshot ). Was ist jetzt zu tun? Bernd_Stein
Bernd S. schrieb: > Was ist jetzt zu tun? Du brauchst Admin Rechte, um Programme installieren zu dürfen. Wer hat sie dir weg genommen? Derjenige kann das wieder in Ordnung bringen.
Angehängte Dateien:
-

Trojaner_Fragezeichen.jpg
120 KB

Stefan ⛄ F. schrieb: > Du brauchst Admin Rechte, um Programme installieren zu dürfen. > > Wer hat sie dir weg genommen? Derjenige kann das wieder in Ordnung > bringen. > Super hört sich nach dem Ende der Fahnenstange an. Ist ein neu gekauftes Komplettsystem. Ich kenne die Rechtklickfunktion " Als Administrator ausführen ". Nur wie bekomme ich dies hierbei hin? Oder habe ich ein ganz anderes Problem ( siehe Screenshot )? Bernd_Stein
Bernd S. schrieb: > Oder habe ich ein ganz anderes Problem ( siehe Screenshot )? Der normale User darf nie in C:\ C:\Programme und andere Ordner schreiben.. Jedenfalls nicht einfach so. Schonmal versucht mit "Speichern unter" etwas in C:\ abzuspeichern?
Irgendwo in der Systemsteuerung kannst du der Administrator den Benutzertyp anderer Accounts ändern. Wie gesagt musst du dich an denjenigen wenden, der das verstellt hat. Er hat die Rechte dazu. Oder du installiert alles neu. Im Rahmen dieser Diskussion können wir Dich nicht zum Windows Fachmann machen. Das musst du woanders lernen. Ich habe das starke Gefühl, dass du die ganze Zeit mit Software hantierst, von deren Komplexität du massiv überfordert bist. Du kommst hier vom Hölzchen zum Stöckchen. Meinst du nicht auch, dass ein anderes Hobby mit buchstäblich begreifbarer Technik für dich besser sein könnte?
Naja, ich denke mal es ist sein eigener Rechenr wie es sich gelesen hat. Also auch der einzige User-Account(automatisch Admin) auf dem Rechner bekommt im Normalfall diese Fehlermeldung wenn er direkt in C:\ und C:\ Programme schreiben will. Dafür gibt es ja "Rechte Maustaste" das "als Administrator ausführen"
:
Bearbeitet durch User
Die Arduino IDE kann man auch über den MS Store installieren, sollte auch unproblematisch sein.
Ich musste mal auf einem 4-Kern Intel Atom Kompilieren da habe ich mir eine Ram-Disk erstellt. Das bedeutet dann Arduino(Portable) arbeitet, kompiliert und greift nur noch auf Dateien im Ram zu. Man muss lediglich die Temp Verzeichnisse auf die Ram-Disk umstellen da ja sonst wieder auf das Windows-Temp Verzeichnis zugegriffen wird.. Dann kann nur noch der Prozessor bremsen. Denke das war so ungefähr bei Marlin auf nem alten Intel Atom: Windows 70 Sekunden Linux 50 Sekunden (benutzt wohl temp als Ramdisk) Win + Ramdisk 30 Sekunden EDIT: Wobei das erste Kompilieren für ein Projekt immer länger benötigt als die folgenden solange man nicht die IDE schliesst.
:
Bearbeitet durch User
Philipp K. schrieb: > Ich musste mal auf einem 4-Kern Intel Atom Kompilieren da habe ich mir > eine Ram-Disk erstellt. > Im diesem Zuge, danke für deine PN, aber ich schnall den ganzen Kram halt nicht, Stefan hat es schon richtig erkannt. Ich hab Microchip kontaktiert, mal sehen ob die das fixen. Muss die Sache jetzt wohl erst mal ruhen lassen. Bin bei meinen Recherchen auf Notpad++ gestossen, wo man Dateien miteinander Vergleichen kann. Hat das AS7 auch so eine Funktion? Bernd_Stein
da es ja vermutlich um Experimente in der configuration.h geht würde ich das unbedingt mit GIT verwalten. Und da reicht doch die Arduino IDE weil die nur zum Build benutzt wird? Für Änderungen am Code sind das nächst bequemere Plattform IO oder VisualStudio Code.
Um mal zu zitieren was ich vor bald zwei Jahren geschrieben habe: Rudolph R. schrieb: > Ich baue Marlin im Moment mit vscode und PlatformIO. > Und mit PlatformIO wird Marlin offensichtlich auch entwickelt. Das ist heute nicht weniger gültig, der Versuch Marlin mit AS7 oder der ArduinoIDE zu bauen verursacht einfach nur unnötige Schmerzen.
Rudolph R. schrieb: > oder der > ArduinoIDE zu bauen verursacht einfach nur unnötige Schmerzen Nein - das geht sehr einfach. Ein Blick in die README erhellt: To build Marlin 2.0 you'll need [Arduino IDE 1.8.8 or newer](https://www.arduino.cc/en/main/software) or [PlatformIO](http://docs.platformio.org/en/latest/ide.html#platformio-ide). Detailed build and install instructions are posted at: - [Installing Marlin (Arduino)](http://marlinfw.org/docs/basics/install_arduino.html) - [Installing Marlin (VSCode)](http://marlinfw.org/docs/basics/install_platformio_vscode.html). Das erste Compilat (man sollte vorher auf den Ziel-MC - z. B. ATMega 2560 - umstellen dauert ein wenig - I5, 10 Jahre alt ca. 20 Min. - ) aber danach geht es bei Konfigurations-Änderungen recht fix (ca. 15 - 20 Sekunden). Frisch probiert - zum Spaß :-) Mit Atmel Studio habe ich das vor 2 Jahren mal probiert und dann verworfen. Viel zu viel Aufwand - geht wahrscheinlich "irgendwie" - aber ist sinnfrei.
:
Bearbeitet durch User
Ich bin mitlerweile auch bei Platform IO.. Etwas hakelig beim kennenlernen der IDE, dann aber echt sorglos was marlin betrifft.
Bernd S. schrieb: > Bin bei meinen Recherchen auf Notpad++ gestossen, wo man Dateien > miteinander Vergleichen kann. Das geht unter vscode (was ja der von Marlin empfohlene Unterbau für platformio ist) ebenfalls sehr einfach. Ich verweise hier mal auf folgenden Stackoverflow-Thread: https://stackoverflow.com/questions/30139597/visual-studio-code-is-there-a-compare-feature-like-that-plugin-for-notepad Ich hab gerade eben mal Marlin 2.0 für mein neues Setup konfiguriert (SKR 1.3 und TMC2130) und der Build hat ca. 5 Minuten gedauert (9 Jahre alter i3-2320m auf einer Linuxkiste). Da der Prozessor mit deinem ungefähr vergleichbar sein sollte, frage ich mich auch, warum das bei dir so viel länger dauert. Ich würde dir jedenfalls empfehlen, das mal mit Platformio zu probieren. Was mich persönlich an Marlin stört, was aber aus der Historie und der ursprünglichen Arduinoherkunft herrührt ist, dass das komplette Build-System "#ifdef"-basiert ist, obwohl es jetzt mit Platformio bzw. dessen Unterbau SCONS ein sehr mächtiges Build-System gäbe um auch wirklich nur die Sachen zu bauen, die auch benötigt werden. Mein Rechenknecht hat etwa locker eine Minute damit verbracht (gefühlt) 30 Dateien zu kompilieren, die für das FTDI-EVE GUI-System gedacht sind und das obwohl ich das gar nicht einsetze. Genau genommen setze ich überhaupt kein grafisches LCD ein, sondern nur so ein 2004-char-LCD, weshalb da sicher noch viel mehr Zeug dabei war, was eigentlich gar nicht benötigt wurde. Dieses Manko lässt sich aber auf die schnelle nicht so einfach beheben und erfordert riesige Umbauten an der Struktur von Marlin insgesamt. Dazu kommt dann noch, dass man dann Marlin nicht mehr mit der Arduino-IDE bauen könnte und wenn ich mich recht erinnere, war das für Marlin 2.0 anfangs sogar der Fall. Scheinbar sind denen dann so viele Leute auf die Barrikaden gegangen, dass die Entwickler wieder zurückgerudert sind, weshalb wir wohl bis auf weiteres damit leben müssen.
Rudolph R. schrieb: > Marlin 2.x wird mit der ArduinoIDE oder AS7 allerdings schwierig, mit > Glück funktioniert da die 2.x Beta der ArduinoIDE. Blödsinn, Marlin 2.0.x noch vor ein paar tagen mit Arduino 1.8.8 geflasht (auf son GT2560 RevA) und es war in etwa so schwierig wie einen Arduino nano mit nem sketch zu füttern. (Anschliessen, ComPort wählen, Genuino2560 auswählen, und den upload button drücken) und der build hat keine 5min gedauert.. nichtmal drei meine ich.. aber nunja ist auch kein i3. 'sid
sid schrieb: > Rudolph R. schrieb: >> Marlin 2.x wird mit der ArduinoIDE oder AS7 allerdings schwierig, mit >> Glück funktioniert da die 2.x Beta der ArduinoIDE. > > Blödsinn, Marlin 2.0.x noch vor ein paar tagen mit Arduino 1.8.8 > geflasht Kein Blödsinn, als ich das 2018 (!) geschrieben habe war das noch so. Aber den Part habe ich gestern auch nicht mitzitiert.
Johannes S. schrieb: > da es ja vermutlich um Experimente in der configuration.h geht würde ich > das unbedingt mit GIT verwalten... > Danke für den Tip, aber es tauchen hier immer mehr Bergriffe auf, die ich erstmal googlen muss und auch noch verstehen. Was mir nicht gerade leicht fällt, da fast alles immer in englisch ist. Christopher J. schrieb: > Bernd S. schrieb: >> Bin bei meinen Recherchen auf Notpad++ gestossen, wo man Dateien >> miteinander Vergleichen kann. > > Das geht unter vscode (was ja der von Marlin empfohlene Unterbau für > platformio ist) ebenfalls sehr einfach. Ich verweise hier mal auf > folgenden Stackoverflow-Thread: > https://stackoverflow.com/questions/30139597/visual-studio-code-is-there-a-compare-feature-like-that-plugin-for-notepad >... > Ich würde dir jedenfalls empfehlen, das mal mit Platformio zu probieren. > Den Thread habe ich nicht gelesen. Das Englische ist einfach zu schwierig für mich, aber *PlatformIO*( PIO ) erscheint mir interessant. Glücklicherweise gibt es noch ein paar YT-ber die bei ihrer Muttersprache geblieben sind und somit konnte ich doch einen guten Eindruck hiervon erhalten : https://www.youtube.com/watch?v=Yb-HOBynJdc Habe jetzt nicht direkt ein Video gefunden, wo mittels PIO, Dateien miteinander verglichen werden, aber ich will dir mal glauben, das dies "sehr" einfach ist. Da ich nur in AVR8ASM ( Die Assemblersprache für Atmels AVR-8-Bit Mikrocontroller ) programmieren kann, wäre für mich äußerst interessant wie dies unter PIO funktioniert. Vielleicht kennt jemand ein YT-Video hierzu oder macht mal eins in deutsch. Ein weiterer intersanter Punkt ist natürlich, das man damit mein Vorhaben ebenfalls umsetzen kann. Leider wieder in englisch, obwohl ich stark vermute das er es auch in deutsch könnte. Aber es zählen natürlich nur klicks und nicht wirklich Wissen weiter zu geben. https://www.youtube.com/watch?v=EQoae6oXszE Bernd_Stein
Bernd S. schrieb: > Den Thread habe ich nicht gelesen. Das Englische ist einfach zu > schwierig für mich, aber *PlatformIO*( PIO ) erscheint mir interessant. Wie heißt es so schön: Wo ein Wille ist, da findet man auch einen Weg und wo kein Wille ist, da findet man einen Grund. Du hättest ja nichtmal lesen müssen, es hätte gereicht dir die paar Bilder anzuschauen um in wenigen Sekunden zu kapieren wie das funktioniert und das wäre dreimal schneller gewesen als dir das hier in Bildbeschreibungssprache zu erklären. Kurz und knapp: Du öffnest zwei Dateien, markierst beide links im "Ordnerfenster", machst einen Rechtsklick und clickst im aufpoppenden Menü auf "vergleichen" (oder so ähnlich, im englischen "compare". Es gibt noch einen zweiten Weg aber den darfst du dir aus dem Link selber raussuchen.
Christopher J. schrieb: > Du hättest ja nichtmal lesen müssen, es hätte gereicht dir die paar > Bilder anzuschauen um in wenigen Sekunden zu kapieren wie das > funktioniert und das wäre dreimal schneller gewesen als dir das hier in > Bildbeschreibungssprache zu erklären. > Oh, sorry. Als ich das ganze Englische gesehen habe, war ich natürlich nicht dazu geneigt weiter zu scrollen. Vergleichen wäre also schon mal geklärt, aber was ist jetzt mit AVR8ASM ? Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Vergleichen wäre also schon mal geklärt, aber was ist jetzt mit AVR8ASM > ? Das was du hier immer wieder als "AVR8ASM" bezeichnest kenne ich nicht. Ich vermute mal du berufst dich auf den Assembler, der mit dem Atmel Studio mitgeliefert wird. Für den wirst du wohl kaum Unterstützung unter pio bekommen. Den avr-as, d.h. den Assembler aus dem AVR-GCC kannst du aber problemlos unter pio nutzen, der hat aber eine leicht veränderte Syntax.
Christopher J. schrieb: > Das was du hier immer wieder als "AVR8ASM" bezeichnest kenne ich nicht. > Ich vermute mal du berufst dich auf den Assembler, der mit dem Atmel > Studio mitgeliefert wird. > Ja, so ähnlich. Ich meine die " Programmiersprache Assembler ", welche auf die 8-Bit Mikrocontroller der Firma Atmel (jetzt Mircochip ) zugeschnitten ist. Welcher Assembler dies leistet ist mir egal, er muss nicht von Mirochip sein. > > Für den wirst du wohl kaum Unterstützung unter > pio bekommen. Den avr-as, d.h. den Assembler aus dem AVR-GCC kannst du > aber problemlos unter pio nutzen, der hat aber eine leicht veränderte > Syntax. > Ich weiß Assembler ist total out, aber gibt es nicht jemanden hier, der seine AVR8-Mikrocontroller in Assembler per PlattformIO ( PIO ) programmiert? Mein Rechner macht zur Zeit schon genug Probleme, da will ich nicht noch tausend Programme herunterladen, die ich dann nicht mehr vollständig deinstalliert bekomme. Bernd_Stein
:
Bearbeitet durch User
Angehängte Dateien:

Ich will mal meine ersten Schritte mit der PlatformIO-IDE ( PIO ) festhalten. Die Installation von PIO in Visual Studio Code lasse ich mal aus, denn selbst ich habe dies problemlos hinbekommen. https://www.heise.de/ct/artikel/Mikrocontroller-bequem-programmieren-mit-PlatformIO-4403209.html Danach bin ich dieser Seite mit dem Google-Übersetzer nachgegangen und bin jetzt dort wo man es im Screenshot sehen kann. https://translate.google.com/translate?hl=de&sl=en&u=https://crosslink.io/2020/03/27/ender-3-pro-marlin-2-0-installation-upgrade-updated-version/&prev=search Hier noch weitere Informationen zu PIO : https://www.az-delivery.de/blogs/azdelivery-blog-fur-arduino-und-raspberry-pi/plattformio https://www.az-delivery.de/blogs/azdelivery-blog-fur-arduino-und-raspberry-pi/platformio-erste-schritte?_pos=2&_sid=c971ab335&_ss=r Bernd_Stein
:
Bearbeitet durch User
Bernd S. schrieb: > Danach bin ich dieser Seite mit dem Google-Übersetzer nachgegangen und > bin jetzt dort wo man es im Screenshot sehen kann. Na siehst du, geht doch in der heutigen Zeit auch mit Englisch ;) Da du ja offenbar mit dem Google-Übersetzer klarkommst hab ich hier noch einen Link für dich: https://community.platformio.org/t/pure-avr-assembler-programming/6499/24
Rudolph R. schrieb: > sid schrieb: >> Rudolph R. schrieb: >>> Marlin 2.x wird mit der ArduinoIDE oder AS7 allerdings schwierig, mit >>> Glück funktioniert da die 2.x Beta der ArduinoIDE. >> >> Blödsinn, Marlin 2.0.x noch vor ein paar tagen mit Arduino 1.8.8 >> geflasht > > Kein Blödsinn, als ich das 2018 (!) geschrieben habe war das noch so. > Aber den Part habe ich gestern auch nicht mitzitiert. Naja da Marlin 2.0 am ersten Dezember 2019 rauskam doch.. totaler Blödsinn sogar :D Und die Wahrscheinlichkeit, dass Marlin 2019 eine 2020 version vom arduino IDE haben musste ist ebenfalls GLEICH NULL ;) 'sid
sid schrieb: > Naja da Marlin 2.0 am ersten Dezember 2019 rauskam doch.. totaler > Blödsinn sogar :D Mag sein, dass die "stable"-Version von Marlin 2.0 erst im Dezember 2019 herausgekommen ist aber erste Versionen von Marlin 2.0 gab es definitiv schon im Sommer 2018.
NU ja aber nightly builds sind ja nu auch immer was gaaanz besonderes.. insbesondere was Zuverlässigkeit angeht bzgl neuer features und da der platformIO Kram in die 117 gehämmert wurde wie doof um die 2.0 alphas zu basteln, ist es durchaus möglich, dass bei den ersten alphas und betas da was von dem originalen Arduino gezeug kaputt ging; Aber das sind bugs, keine Indikatoren dass man auf platformIO wechseln sollte. (ernsthaft, platformIO ist zum entwickeln klasse, zum kompilieren völliger Unsinn mMn) 'sid
Ich denke ich werde es hier weiterführen, da die Gestalltungsmöglichkeiten einfach besser sind : https://www.edv-dompteur.de/forum/index.php?page=Thread&postID=4260#post4260 Bernd_Stein
Bernd S. schrieb: > Ich denke ich werde es hier weiterführen, da die > Gestalltungsmöglichkeiten einfach besser sind : Na, dann lass mal die Peitsche knallen :-)
sid schrieb: > NU ja aber nightly builds sind ja nu auch immer was gaaanz > besonderes.. > insbesondere was Zuverlässigkeit angeht bzgl neuer features > und da der platformIO Kram in die 117 gehämmert wurde wie doof um die > 2.0 alphas zu basteln, ist es durchaus möglich, dass bei den ersten > alphas und betas da was von dem originalen Arduino gezeug kaputt ging; > Aber das sind bugs, keine Indikatoren dass man auf platformIO wechseln > sollte. > (ernsthaft, platformIO ist zum entwickeln klasse, zum kompilieren > völliger Unsinn mMn) Meine Güte, noch mal zum langsam lesen, als ich das 2018 schrieb konnte Marlin 2 nicht mit der zu der Zeit verfügbaren Release-Version der ArduinoIDE gebaut werden. Sehr wohl aber mit PlatformIO. Das hat so gar nichts damit zu tun das irgendwelche Features der Marlin 2 nicht funktioniert hätten, das war ein Bug in der ArduinoIDE der später gefixt wurde. Und die Marlin Entwickler hat das zurecht wenig interessiert, da Marlin eben mit PlatformIO entwickelt wird und nicht mit der ArduinoIDE. Aber die einzig relevante Frage in dem Zusammenhang ist doch, warum gräbst Du sowas überhaupt aus?
Rudolph R. schrieb: > Das hat so gar nichts damit zu tun das irgendwelche Features der Marlin > 2 nicht funktioniert hätten, das war ein Bug in der ArduinoIDE der > später gefixt wurde. > Und die Marlin Entwickler hat das zurecht wenig interessiert, da Marlin > eben mit PlatformIO entwickelt wird und nicht mit der ArduinoIDE. Schon wieder Blödsinn :( ..da Marlin JETZT mit platformIO (weiter)entwickelt wird und nicht(mehr) mit Arduino IDE. müsste es heissen! Uund der switch von arduinoIDE auf platformIO hat die Probleme verursacht beim kompilieren dieser early nightly builds in der arduinoIDE. 'features' der marlin 2.0 funktionierten; aber bei der implementierung jener wurden "features" der Grundlegenden (ich meine 1.1.7 kann aber 1.1.6 gewesen sein) schlicht ruiniert. Denn wie gesagt, die 1.1.xer waren ja schon da und die kompilierten alle weiterhin fehlerlos in der arduino IDE.. und das offizielle 2.0 release ebenfalls (dez 2019... was aussagen von 2018 ins absurde schiebt weil prerelease krempel) und ich grub nix aus, ich widersprach nur vorhergemachten Aussagen, da sie schlicht nicht der Realität entsprechen. 'sid PS Und da die wenigsten Nutzer von Marlin auch Entwickler von Marlin sind, ist platformIO für fast alle Nutzer völliger Unsinn! (aber das ist in der tat nur meinung nicht zwingend Fakt ;))
sid schrieb: > Schon wieder Blödsinn :( > ..da Marlin JETZT mit platformIO (weiter)entwickelt wird und nicht(mehr) > mit Arduino IDE. > müsste es heissen! Lesen kannst Du ? Unsinn schreibst Du ... :-)
sid schrieb: > Schon wieder Blödsinn :( [...] Also erst lehnst du dich hier ganz weit aus dem Fenster und bezeichnest Aussagen von Anderen, die zum damaligen Zeitpunkt voll und ganz zutrafen als "Blödsinn", ruderst dann volle Kraft zurück und faselst dann irgendwas von "early nightly builds", etc. Das ist schon wirklich amüsant, insbesondere folgende Aussage: sid schrieb: > ernsthaft, platformIO ist zum entwickeln klasse, zum kompilieren > völliger Unsinn mMn PlatformIO ist in erster Linie ein Build-System (basierend auf SCONS). Wofür soll denn bitte ein Build-System gut sein, wenn nicht zum kompilieren (sprich bauen)? Das man bei den PIO-Plugins für VSCode oder Atom auch noch Syntaxvervollständigung, etc. oben drauf bekommt, macht es zwar in der Tat angenehmer zum "entwickeln" (im Gegensatz zur völlig steinzeitlichen Arduino-IDE) aber es schränkt doch die Build-Funktionalität nicht ein. sid schrieb: > ..da Marlin JETZT mit platformIO (weiter)entwickelt wird und nicht(mehr) > mit Arduino IDE. > müsste es heissen! Nein, auch schon 2018, was nach meinem Zeitverständnis etwas völlig anderes ist als "jetzt".
:
Bearbeitet durch User
Angehängte Dateien:
-

PIO_Build_Error.jpg
100 KB -

MARLIN_Pfad_A.jpg
37 KB -

MARLIN_Pfad_B.jpg
100 KB -

MARLIN_Pfad_Config.jpg
64 KB




Philipp K. schrieb: > Ich bin mitlerweile auch bei Platform IO.. > > Etwas hakelig beim kennenlernen der IDE, dann aber echt sorglos was > marlin betrifft. > Vielleicht kannst du oder andere hier mir dann weiterhelfen. Habe MARLIN in der Version 2.0.5.3 per PIO kompiliert und erhalte die Fehlermeldung wie sie im Screenshot zu sehen ist. Die Configurations.h habe ich aus dem EXAMPLE-Ordner für den TRONXY X3A übernommen und ein paar nötige Änderungen gemacht, da ich nicht das orginal Board ( MELZI ) verwende, sondern das Arduino Mega2560. Die " Wellenlinie " ist wohl nicht das Problem oder? *Wie, was, ..., aktualisieren sie ihren Include-Pfad?* Ich habe den entpackten MARLIN-Ordner im folgenden Pfad hinterlegt : G:\Projekte AVR-Studio\ATmega\ATmega256\ATmega2560\Marlin-2.0.5.3\Marlin-2.0.5.3 Was muss ich tun damit der Fehler behoben wird? Bernd_Stein
:
Bearbeitet durch User
Christopher J. schrieb: > Nein, auch schon 2018, was nach meinem Zeitverständnis etwas völlig > anderes ist als "jetzt". das war ein versionsbedingtes nicht Zeitbedingtes "Jetzt" Also jetzt (i.e V2.0) entgegen "früher" (i.e. V1.1) 2018 gab es offiziell keine v2.0 (nur als nightly!) die erste v2.0 kam am ersten Dezember 2019 und jene liess sich problemlos und fehlerfrei mit arduino IDE kompilieren. Die Aussage, dass sich marlin 2.0 also nicht mit arduino IDE kompilieren lässt ist immernoch BLÖDSINN, denn jede offizielle release version von marlin 2.0 (JEDE!) lässt sich sicherlich mit arduinoIDE kompilieren. platformIO ist wie gesagt dufte, und ja damit kann man sehr einfach nahezu zeitgleich für dutzende UNterschiedliche Platformen kompilieren.. der Punkt "für dutzende unterschiedliche Plattformen" jedoch impliziert ein wenig "Entwicklung" denn die wenigsten Endanwender nutzen sechs sieben verschiedene Platformen. eine, vieleicht zwei und wenn sie ein ganzes Array unterschiedlichster Drucker haben auch mal drei... aber mehr wird das nicht. und in diesem Fall ist das Kompilieren für den Heimnutzer mit ArduinoIDE nahezu genausoschnell wie mit platformIO Die wahre Stärke von platformIO ist eben die leichtere schneller entwicklung für plattformübergreifenden Code; Aber ich sehe Windmühlen, also geb ich Rosinante mal nen kleinen Klaps in die Andere Richtung. 'sid
Angehängte Dateien:
-

PIO_Build_Warnungen.jpg
410 KB -

PIO_Build_Error_Motion.jpg
240 KB


Ok, das " Wellenproblem " hat sich wohl von selbst erledigt. Es gibt keine Fehlermeldung zur Configuration.h Datei mehr, obwohl ich nichts weiter gemacht habe als erneut zu builden. Ist es möglich, das die Warnmeldungen ausschlaggebend sind und es deshalb zu den Fehlermeldungen in der *Motion.cpp* kommt? Bernd_Stein
Das ist ja kein Fehler im Code und den Compiler juckt das nicht. Es ist das Intellisense Feature der IDE das den Code selber analysiert und dazu die Includepfade braucht. Etwas über deiner fetten Markierung steht doch 'Auto Generated File', damit wird sich die Intellisense Konfig beim Build automagisch repariert haben. Echte Fehler sind fehlenden _HOME_BUMP_MM die wohl in der configuration.h oder adv_configuration.h stehen sollten. Und wenn die drinstehen, dann nachsehen ob die nicht evtl. über ein Konfigmakro davor deaktiviert sind.
Angehängte Dateien:
-

PIO_Build_Succeeded.jpg
260 KB

Johannes S. schrieb: > Echte Fehler sind fehlenden _HOME_BUMP_MM die wohl in der > configuration.h oder adv_configuration.h stehen sollten. > Wow, vielen Dank. Bin jetzt wieder einen Schritt weiter und nur 3 Minuten für das Kompilieren ist ein riesen Fortschritt gegenüber der Arduino-IDE die ca. 10x solange braucht. Hier in diesem Video ab 2:06 ist dieser Fehler beschrieben und für Copy&Paste den Link verwenden. https://www.youtube.com/watch?v=EQoae6oXszE https://github.com/MarlinFirmware/Marlin/issues/17878#issuecomment-623860740 Bernd_Stein
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.