Hallo zusammen,
wir möchten einen Schrittmotor Nema34 mit einem Motortreiber HB860H über
einen Arduino ansteuern. Die Stromversorgung erfolgt über ein 400W
Netzteil.
Ohne Last im Leerlauf funktioniert die Ansteuerung ohne weitere
Probleme. Sobald er allerdings in der Anlage verbaut ist, funktioniert
es entweder nur mit starkem Ruckeln, oder der Motortreiber geht sofort
in Störung nach dem Starten. Dabei kommt für 3 Sekunden allerdings erst
noch ein kurzes Geräusch vom Motor. Manchmal taucht die Störung auch
erst nach einigen Durchläufen auf.
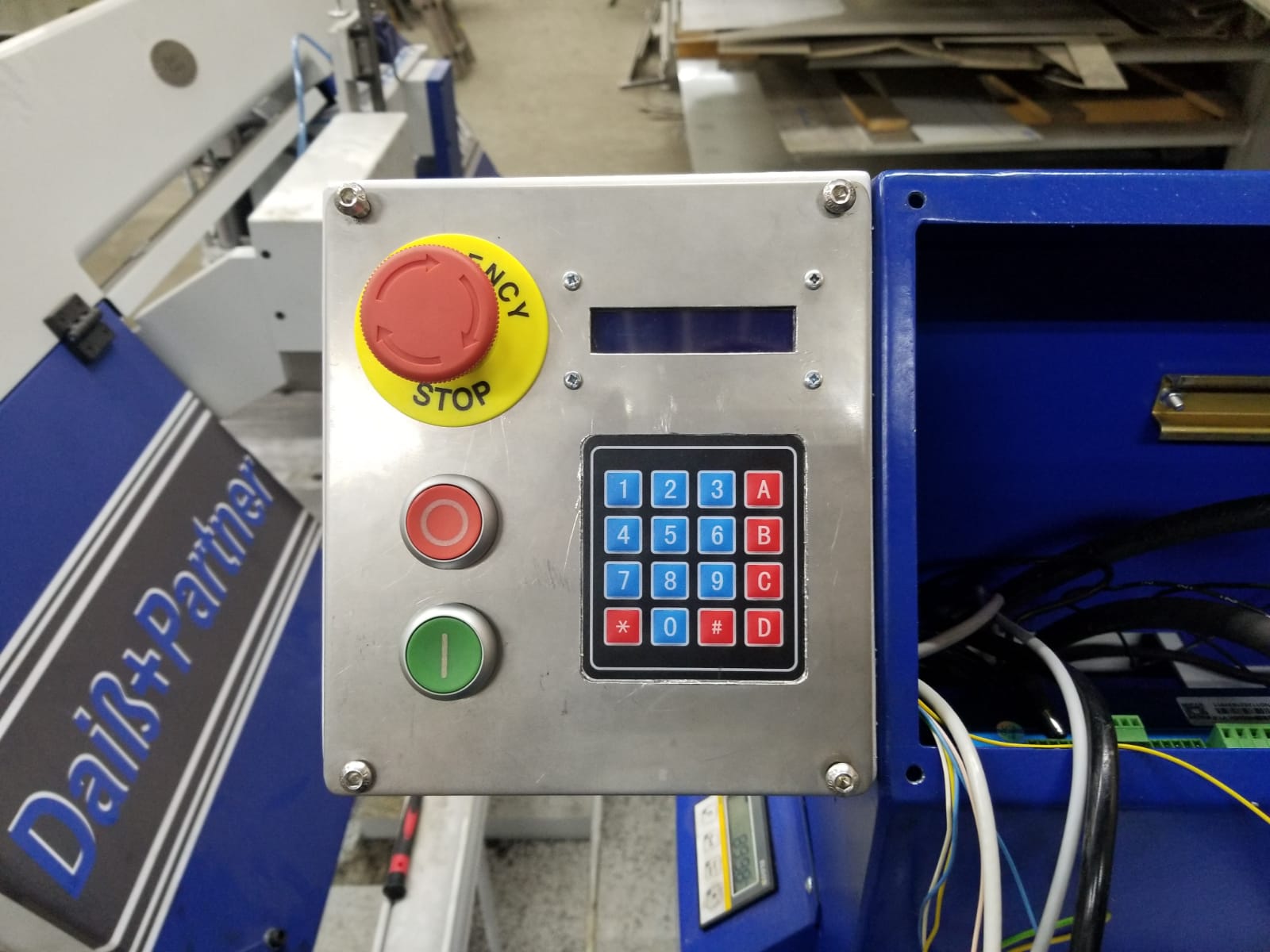
Es handelt sich um einen Sägeanschlag. Die Referenzfahrt funktioniert
hierbei nur beim Starten im hinteren Drittel. Im vorderen Bereich
funktioniert es nur mit manueller Anschieb-Hilfe.
Wir sind etwas verwirrt, da es im Leerlauf funktioniert, und erst unter
leichtgängiger / meiner Meinung nach vernachlässigbarer Last zu diesen
Problemen kommt.
Was könnte eurer Meinung nach die Ursache dafür sein?
Nachfolgend das Arduino-Programm:
1
#include<Keypad.h>
2
#include<LiquidCrystal.h>
3
#include<AccelStepper.h>
4
5
//--- Pin-Belegungen
6
7
constintrs=0,en=1,d4=2,d5=3,d6=4,d7=5;//Pin-Belegung für LCD
8
constintpuls=9,direct=8;//Pin-Belegung für Motor
9
constintbremse=6;//Pin-Belegung für Bremse
10
constintreferenzSensor=7;//Pin-Belegung für Referenzsensor
11
constintsaegeSensor=10;//Pin-Belegung für Sägemotor
12
constintschraubstockSensor=11;//Pin-Belegung für Schraubstock
13
constbyteROWS=4;
14
constbyteCOLS=4;
15
byterowPins[ROWS]={A0,A1,A2,A3};//Pin-Belegung für Keypad (1-4, von links nach rechts)
16
bytecolPins[COLS]={A4,A5,12,13};//Pin-Belegung für Keypad (5-8, von links nach rechts)
17
18
//--- Konstanten
19
20
constfloatlengthPerStep=0.11f;//Länge pro Schritt
21
constfloatreferenz=3093;//Referenzposition nach der Referenzfahrt
22
constfloatextraLaenge=10;//Extra-Länge bei der Schleifenfahrt
Marvin G. schrieb:> Nachfolgend das Arduino-Programm:
Was ist denn so schwer verständlich an dem Text über jeder Eingabebox?
1
Antwort schreiben
2
Wichtige Regeln - erst lesen, dann posten!
3
- Groß- und Kleinschreibung verwenden
4
- Längeren Sourcecode nicht im Text einfügen, sondern als Dateianhang
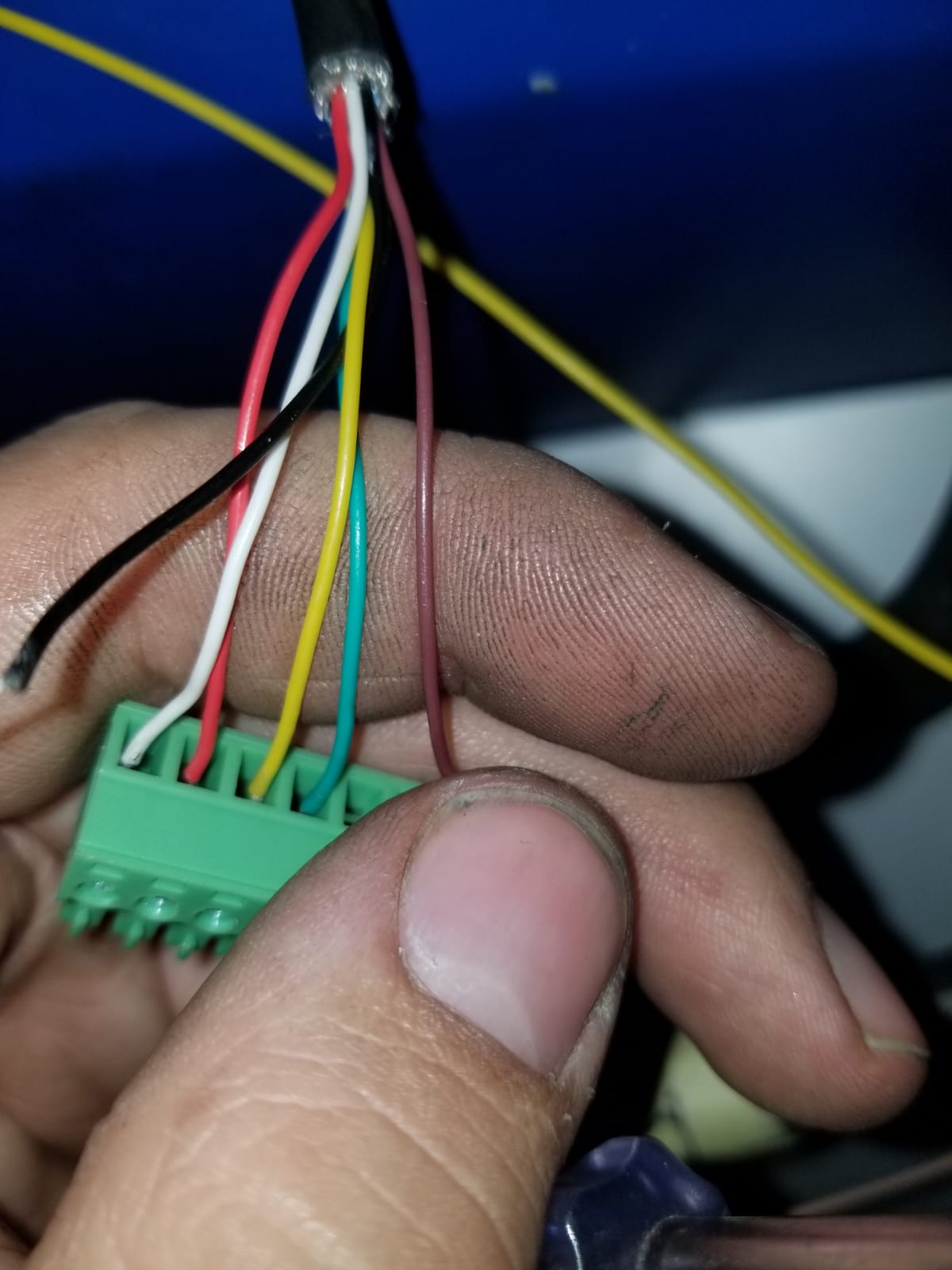
Marvin G. schrieb:> Was könnte eurer Meinung nach die Ursache dafür sein?
Schlechte oder falsche Verkabelung und ungünstige Masseführung. Zeig mal
einen Schaltplan mit den verwendeten Bauteilen und ein paar Fotos vom
Aufbau.
Marvin G. schrieb:> Es handelt sich um einen Sägeanschlag. Die Referenzfahrt funktioniert> hierbei nur beim Starten im hinteren Drittel. Im vorderen Bereich> funktioniert es nur mit manueller Anschieb-Hilfe.
Da würde ich mal frech behaupten, das Teil ist ein bisschen schwach auf
der Brust. Besonders wenn es OHNE Last, sauber seinen Job macht.
Wie stark ist denn das Teilchen lt. Datenblatt.
Manuelle Anschiebehilfe bedeutet IMMER : Das der Anzugsmoment des Motors
zu schwach ist.
Ist wie wenn du ein Auto im 3 Gang an fährst. Das läuft auch erst wenn
du es anschiebst. ;)
Mein Tipp : Tausche den Motor. Und berechne VORHER welche Kraft du
benötigst. Es gibt da den Trick mit den Gewicht am Faden als
Notfallalternative.
Marvin G. schrieb:> meiner Meinung nach vernachlässigbarer Last
Wird da dann per Handzeichen abgestimmt ob die Last vernachlässigbar ist
oder nicht? Oder hast du mal das nötige Drehmoment einfach mal
gemessen? Denn nur, wenn du weißt, was du anzusteuern hast, kannst du
auch die Hardware dafür aufbauen. Eh' klar.
> Was könnte eurer Meinung nach die Ursache dafür sein?
Du hast evtl. auch nur deinen Schrittmotortreiber falsch konfiguriert.
Miss doch mal, wieviel Drehmoment/Haltemoment der Schrittmotor
zusammenbringt. Davon ziehst du dann das Moment ab, das die wie gemeint
leichtgängige Mechanik braucht, und dann muss unbedingt ein positiver
Wert herauskommen.
> Es handelt sich um einen Sägeanschlag.
Da war doch letzhin im
Beitrag "Re: Bandsäge ansteuern" auch schon was in
der Art. Ich würde dir so einen Scheibenwischermotor und einen Drehgeber
zur Positionserfassung empfehlen. Mit dem geht das.
Schlaumaier schrieb:> Ist wie wenn du ein Auto im 3 Gang an fährst. Das läuft auch erst wenn> du es anschiebst. ;)
Ich kann das auch ohne Anschieben... ;-)
Marvin G. schrieb:> 400W
Spannung/Strom ist egal?
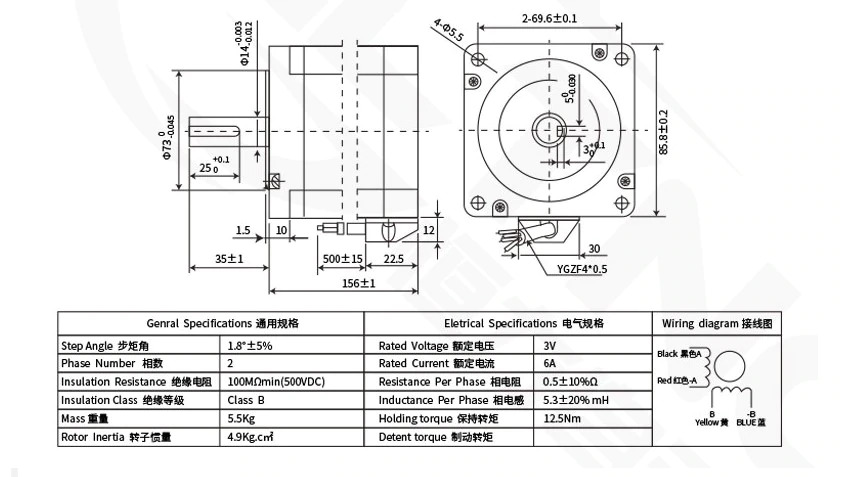
Marvin G. schrieb:> Nema34
Womit zumindest das Lagerschild/Befestigung des Motors definiert sind.
Die elektrischen Werte sind egal?
Danke für die schnellen Antworten!
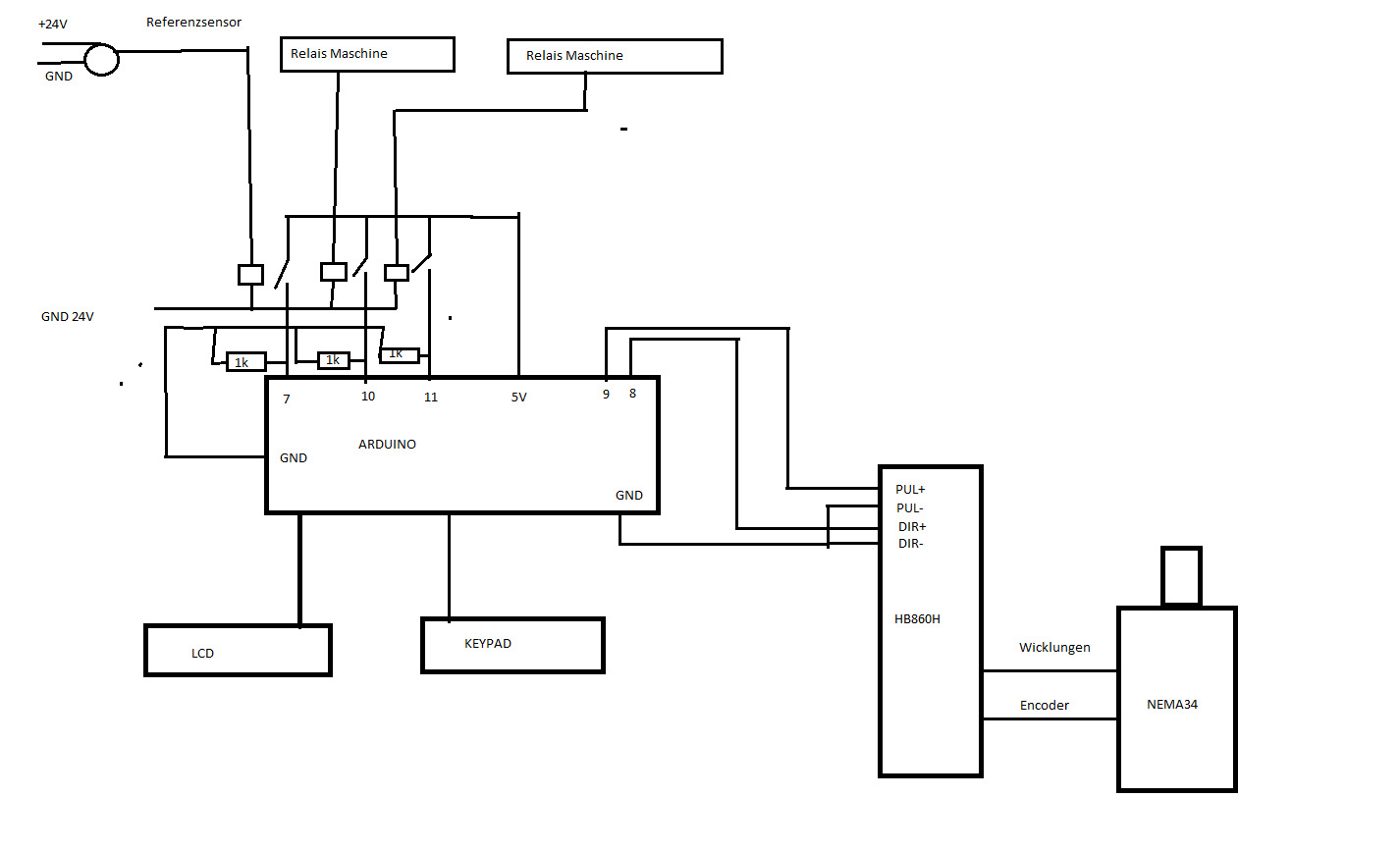
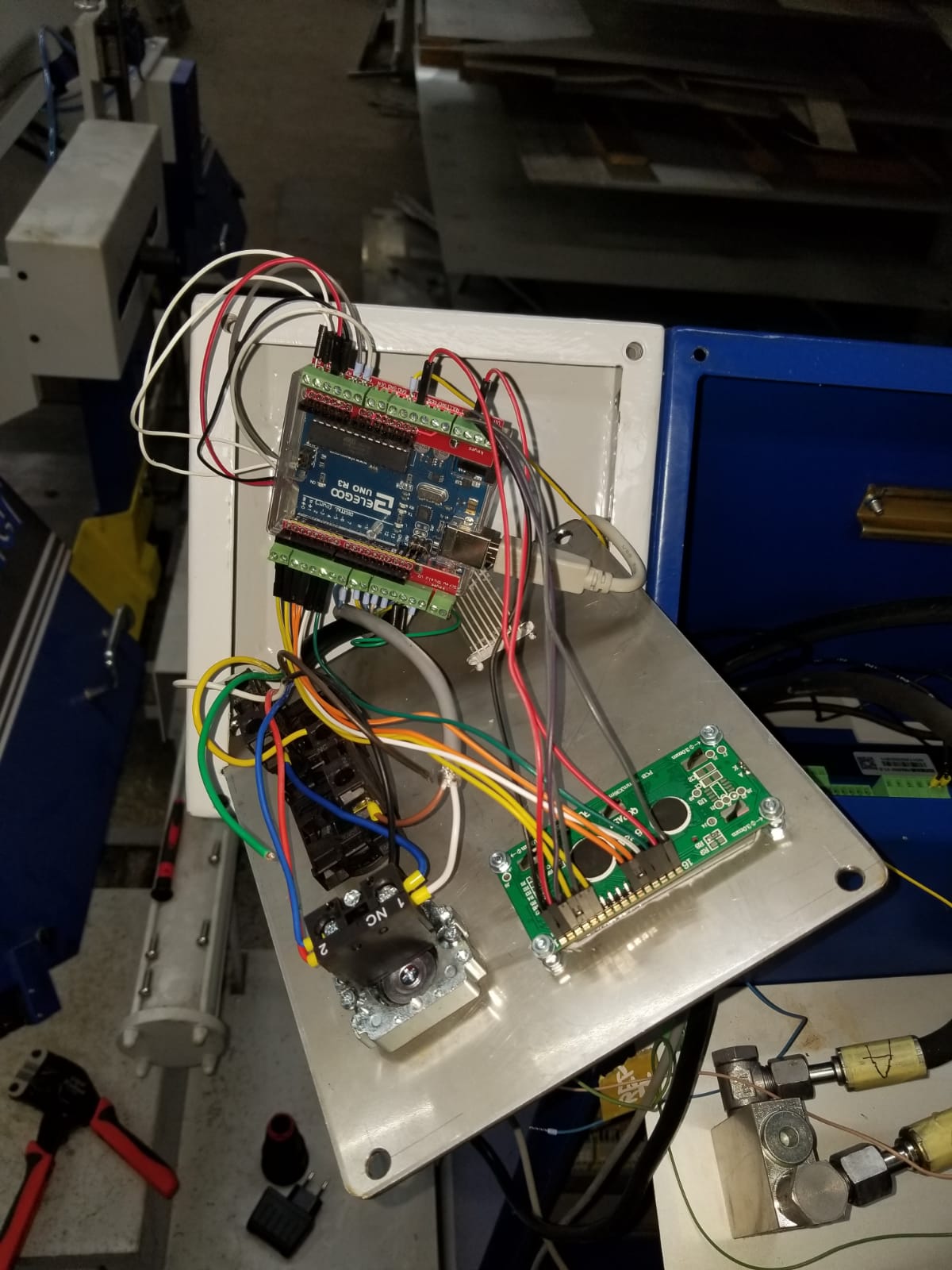
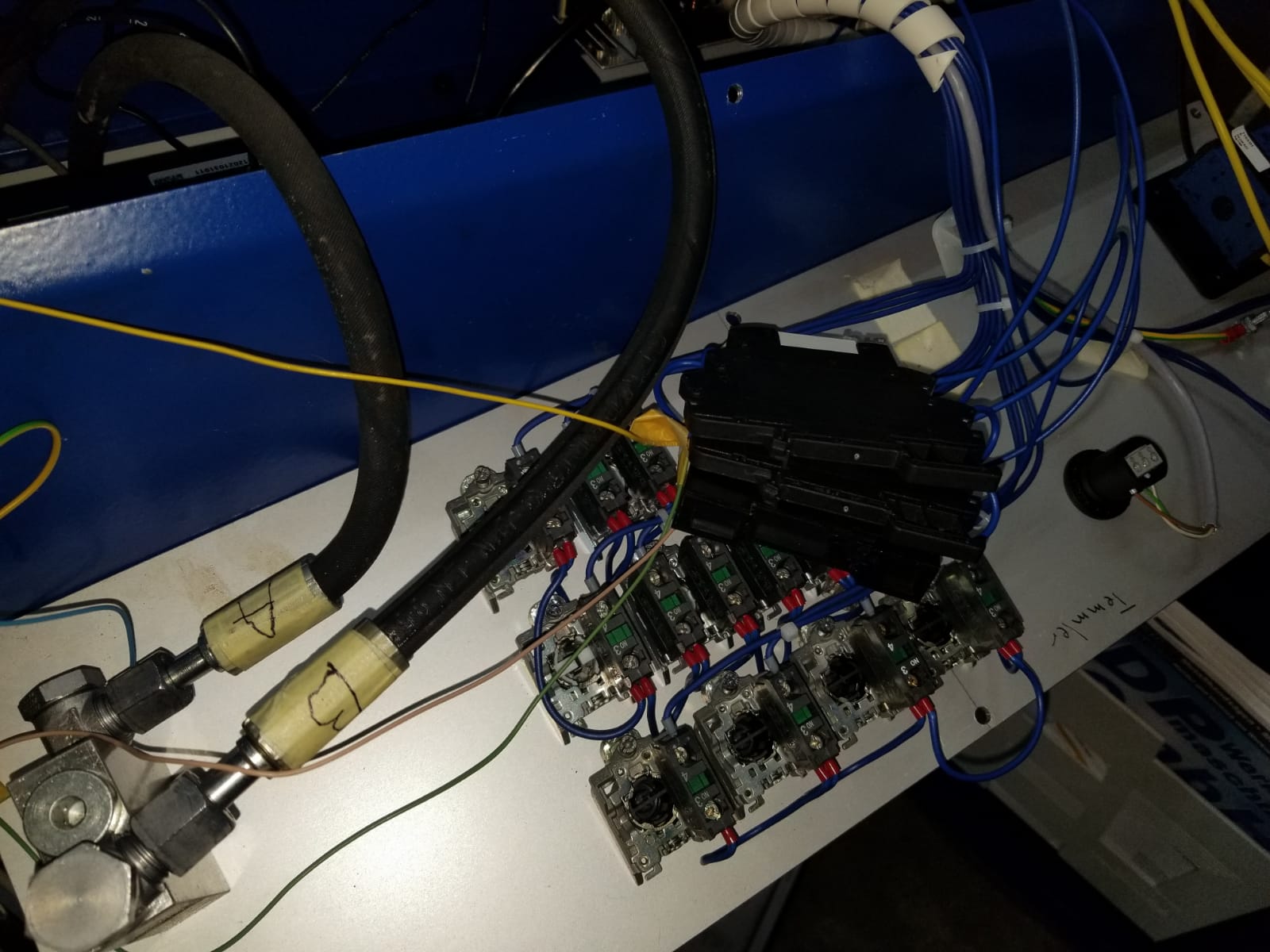
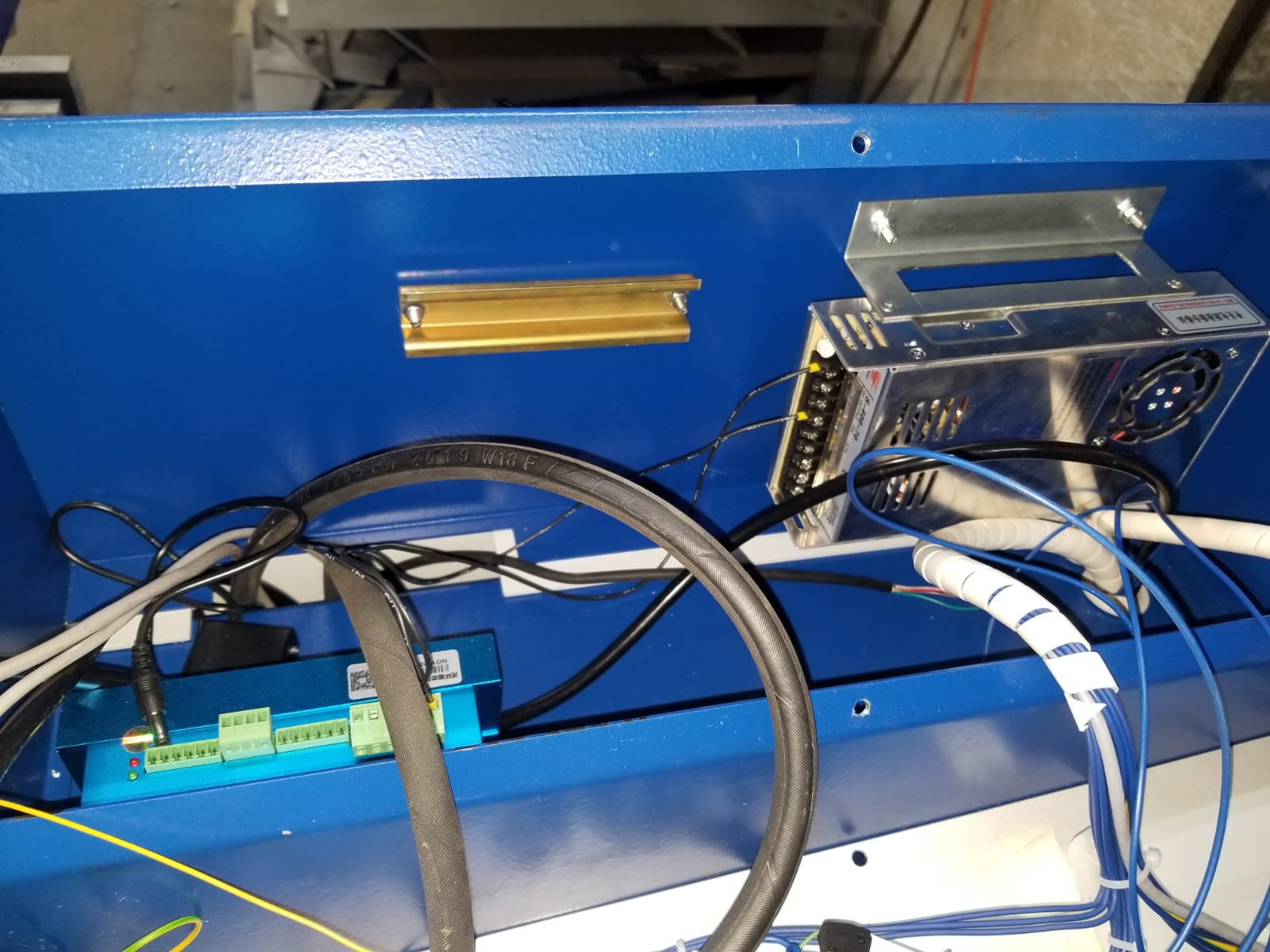
Anbei noch ein kurzes Video von der Referenzfahrt und einer
Positionierung sowie der Schaltplan und Bilder des Aufbaus und die
Datenblätter des Motors.
Spannungsversorgung vom Netzteil:
Spannung 70V
Strom 5.7A
Haltemoment des Motors ist stark genug, man muss sehr viel Kraft
aufwenden um das Haltemoment zu überwinden.
Hat einer Erfahrungen bzgl. der Anpassung der Parameter des
Motortreibers HB860H? Möglicherweise lässt sich durch die Anpassung
derer noch etwas rausholen.
Schlaumaier schrieb:> Lothar M. schrieb:>> Ich kann das auch ohne Anschieben... ;-)> armes kleines Getriebe. ;))
Die Kupplung ist es, der es warm wird...
Schlaumaier schrieb:> Mich würde echt mal interessieren was der ziehen SOLL.
Naja, mit einem Haltemoment von 1100 Ncm könnte man immerhin 1kg am Ende
einer 1m langen Stange halten. Das kann man ja leicht ausprobieren.
Und das kann man jetzt ja mal gegen die Mechanik vergleichen. Aber die
fühlt sich bei 10Nm sicher nicht "leichtgängig" an...
Joe schrieb:> Hast du eine Beschleunigungsrampe programmiert?
Offenbar schon, wenn auch anhand der MagicNumbers gefühlt recht knackig:
1
stepper.setSpeed(100);
2
stepper.setAcceleration(750);
Aber das ist vermutlich sowieso nicht nötig, weil damit nur eine Spindel
angetrieben und nichts großartig beschleunigt wird.
Marvin G. schrieb:> Spannungsversorgung vom Netzteil:> Spannung 70V> Strom 5.7A
Über die beiden mickrigen Drähtchen?
Ich tippe wieder auf ein Problem bei der Masse- und/oder
Versorgungsführung.
> Spannungsversorgung vom Netzteil:> Spannung 70V
Gratulation, super gewählt, passt ja tadellos zu den 3V vom
Schrittmotor.
[/ironie]
Der Stromregler kriegt ja einen Vogel, weil er gleich nach dem
Einschalten wieder Abschalten muss.
Joe schrieb:> Probiere den Motor mal mit halber Geschwindigkeit laufen zu lassen.> Hast du eine Beschleunigungsrampe programmiert?
Ich habe die AccelStepper-Bibliothek verwendet.
Geschwindigkeit hatten wir schon immer mal geändert, leider trotzdem
noch die gleichen Phänomene.
Die Referenzfahrt verläuft ohne Beschleunigung, und dort treten die
Phänomene wie beschrieben auch auf.
Man kann auch eine Rampe im Motortreiber als Parameter hinterlegen, aber
die Parameter haben wir wie gesagt bisher nicht angefasst.
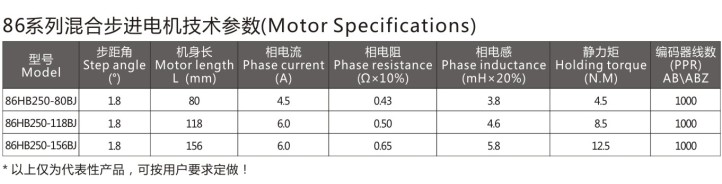
Nema34 sagt über den Motor nur die Schutzklasse aus, analog zur
europäischen IPXX
Ich würde mal die Stromaufnahme messen, damit man mal weis woher das
Problem überhaupt kommt.
Außerdem liefert das Netzteil 5,7 A und der Motor braucht 6 A lt
Datenblatt, damit sollte das Netzteil mindesten 3 mal soviel liefern wie
der Motor braucht, damit du überhaupt ordentlich anfahren kannst, also
mindest. ein 20 A Netzteil.
Xaver M. schrieb:> Nema34 sagt über den Motor nur die Schutzklasse aus, analog zur> europäischen IPXXXaver M. schrieb:> damit sollte das Netzteil mindesten 3 mal soviel liefern
Ungefähr alles in diesem Beitrag ist sachlich falsch. Schrittmotor und
Treiber arbeiten hier als Abwärtswandler. NemaXXX ist das Flanschmaß.
Lothar M. schrieb:>> Spannungsversorgung vom Netzteil:>> Spannung 70V> Gratulation, super gewählt, passt ja tadellos zu den 3V vom> Schrittmotor.> [/ironie]
Das passt eigentlich ganz gut. Die Mikroschritt-Endstufen mögen gerne
viel Freiraum zum regeln.
Was mir gerade aber nicht klar ist: Das ist eine Closed-Loop-Endstufe.
Wie ist denn der Drehgeber angebunden?
Xaver M. schrieb:> Dieter Nuhr hat Zitate für dich,
Ich nehme an, Du meinst "Man kommt ja zu nix."
Ansonsten guckste mal auf die Überschrift Deines Dokuments.
Walter T. schrieb:> Ansonsten guckste mal auf die Überschrift Deines Dokuments.
Ich habe sogar weiter gelesen ...
Diese Tabelle ist ausschließlich als Orientierungshilfe zu betrachten.
Xaver M. schrieb:> Ich habe sogar weiter gelesen ...
...nur offensichtlich nicht bis zum Wort "Drehstrommotoren". Meine Güte,
was ist heute los? Wir haben doch keinen Vollmond?
Edit: Ich habe sicherheitshalber nochmal recherchiert, damit ich hier
keinen Unsinn schreibe: Der nächste Neumond ist in 7 Tagen.
@TO: Welche Spindelsteigung hast Du denn? Die
Motor-Endstufen-Kombination müsste eigentlich bei der Spannung Kraft
haben wie ein Büffel.
Und vielleicht die Hintergrundmusik wegmachen. Ansonsten gibt es noch
irgendwann Ärger mit den Erben von Maggie Reilly. Die ist schließlich
auch schon Mitte Sechzig.
Walter T. schrieb:> Edit: Ich habe sicherheitshalber nochmal recherchiert, damit ich hier> keinen Unsinn schreiber: Der nächste Neumond ist in 7 Tagen.
Bemerkenswert, ich nehme an den Bezug zum Eingangsthema lieferst du noch
nach?
Natürlich ist die Tabelle für Drehstrommotoren, wer allerdings
aufmerksam liest stellt fest, das die ANlaufströme IMMER deutlich höher
sind, womit sich die Schlußfolgerung ergibt, sich damit im speziellen
nochmals zu beschäftigen, ggf. kannst du ihm den genauen Wert ja
ausrechnen oder überzeugst dich hier:
https://de.wikipedia.org/wiki/Einschaltstrom
das dieses Netzteil nicht passt, ups, jetzt sind es Asynchronmotoren ...
verdammt, und auch hier ein erhöhter Anlaufstrom, mindestens 4.fach
verhext ... echt.
Ich Zitiere nochmal deine Aussage:
Ungefähr alles in diesem Beitrag ist sachlich falsch.
Im letzten Post ist ein Satz richtig. Der hier:
Xaver M. schrieb:> Ungefähr alles in diesem Beitrag ist sachlich falsch.
Und wenn Du Dich nicht weiter blamieren magst, schau Dir mal an, wie
Schrittmotoren heutzutage betrieben werden. Es handelt sich um ein
relativ modernes Closed-Loop-Schrittmotor-System, und so ziemlich alles,
was einen Asynchronmotor ausmacht, trifft hier nicht zu. Schon allein
deswegen nicht, weil hier Stromregelung betrieben wird.
Deswegen ist hier die angegebene Spannung eine Mindestspannung und der
Strom ein Höchststrom *) durch die Motorwindungen, wobei die
Motor-Induktivität genutzt wird, dass das System als Abwärtswandler
arbeitet.
*) thermisch bedingter Effektivwert
Und nach allem, was ich gesehen habe, passen Netzteil, Endstufe und
Motor auch gut zusammen. Bleibt also noch der Drehgeber und der
Spindeltrieb als fragliche Komponente. Nicht dass irgendwas Unpassendes
gemacht wurde und der Drehgeber mit Spiel oder einer flexiblen Kopplung
angetrieben wird.
Walter T. schrieb:> Und wenn Du Dich nicht weiter blamieren magst,
doch, mag ich, auch weil du noch nichts zu Nema/IPxx/den Flanschmaßen
gesagt hast, sei so nett, der Vollständigkeit halber, nicht das bei
ungefähr alles die Hälfte noch zurückbleibt.
Walter T. schrieb:>> Das passt eigentlich ganz gut. Die Mikroschritt-Endstufen mögen gerne> viel Freiraum zum regeln.>> Was mir gerade aber nicht klar ist: Das ist eine Closed-Loop-Endstufe.> Wie ist denn der Drehgeber angebunden?
Der Schrittmotor hat einen integrierten Encoder, welcher direkt auf den
Motortreiber geklemmt wird.
Walter T. schrieb:>> @TO: Welche Spindelsteigung hast Du denn? Die> Motor-Endstufen-Kombination müsste eigentlich bei der Spannung Kraft> haben wie ein Büffel.
Angetrieben wird das ganze über einen Zahnriementrieb und nicht über
eine Spindel. Ich weiß nicht mehr die genaue Teilung, aber eine
Umdrehung entsprechen 176mm Verfahrweg.
Es gab beim Testen eine Fehlersituation in der der Motor mit Vollschub
gefahren ist. Weit schneller als das was wir angesetzt haben. Spätestens
damit war mir klar, dass der Motor genug Kraft haben muss.
Walter T. schrieb:>> Und nach allem, was ich gesehen habe, passen Netzteil, Endstufe und> Motor auch gut zusammen. Bleibt also noch der Drehgeber und der> Spindeltrieb als fragliche Komponente. Nicht dass irgendwas Unpassendes> gemacht wurde und der Drehgeber mit Spiel oder einer flexiblen Kopplung> angetrieben wird.
Wie bereits angemerkt befindet sich der Encoder im Motor selbst. Ich
werde morgen auch nochmal mit einem Oszi schauen, was aus dem Arduino
als Pulssignal herauskommt, sowie nachsehen was mit der Netzteilspannung
passiert.
mfg Felix
https://de.wikipedia.org/wiki/Schrittmotor#Baugr%C3%B6%C3%9Fe
Das man NEMA im Zusammenhang mit Schrittmotoren für Schutzklassen
verwendet habe ich noch nie gesehen, und ich habe auch schon viel mit
Schrittmotoren gemacht.
Die 6A sind bei 3V gerade mal 18 Watt statisch, mal zwei keine 40 Watt.
Das man bei SM mit höheren Spannungen arbeitet um das Magnetfeld schnell
aufzubauen sollte sich auch schon rumgesprochen haben. Das Netzteil ist
gut, bis auf die Tatsache das man vielleicht bei sicheren 48 V bleiben
sollte wenn man den Motor nicht bis aufs letzte ausreizen muss.
Und dann der Schlaumeier der so einen Klopper für 3D Drucker verwenden
würde, ja nee, is klar. 12,5 Nm quetschen dir locker einen Finger ab
wenn du damit eine Spindel antreibst.
Neben den Dupontkabeln in einem Industriegerät (ein No Go) gefällt mir
das Arduinoprogramm am wenigsten. Entweder das verwenden was dafür
entwickelt wurde: eine SPS, oder wenigstens das Kapitel Schrittketten /
Statemachine verinnerlichen.
Die Bremse wird z.B. nicht in 0 ms lösen, wenn der SM dann schon laufen
soll verliert er Schritte oder die Steuerung mit CL geht in die Störung.
Xaver M. schrieb:> Nema/IPxx/den Flanschmaßen
Ich bin kein Freund von "Such mal bei Google!!!!", aber die Stichworte
"Nema" und "Flanschmaß" sind tatsächlich ergiebig.
Felix schrieb:> aber eine> Umdrehung entsprechen 176mm Verfahrweg.
Ui! Das ist viel! Bei mir an der Drehbank hat ein Motor mit 6 Nm
2mm/Umdrehung. Das habe ich sehr konservatv gewählt, da
Trapezgewindespindel.
Bekomnt ihr mit einem kleineren Übersetzungsverhältnis nicht mehr auf
die geforderte Geschwindigkeit?
Johannes S. schrieb:> https://de.wikipedia.org/wiki/Schrittmotor#Baugr%C3%B6%C3%9Fe>> Das man NEMA im Zusammenhang mit Schrittmotoren für Schutzklassen> verwendet habe ich noch nie gesehen, und ich habe auch schon viel mit> Schrittmotoren gemacht.> Die 6A sind bei 3V gerade mal 18 Watt statisch, mal zwei keine 40 Watt.> Das man bei SM mit höheren Spannungen arbeitet um das Magnetfeld schnell> aufzubauen sollte sich auch schon rumgesprochen haben. Das Netzteil ist> gut, bis auf die Tatsache das man vielleicht bei sicheren 48 V bleiben> sollte wenn man den Motor nicht bis aufs letzte ausreizen muss.
Der Treiber war glaube ich bis 100V oder 120V DC angegeben, daher hatte
ich die 70V ausgewählt...
> Und dann der Schlaumeier der so einen Klopper für 3D Drucker verwenden> würde, ja nee, is klar. 12,5 Nm quetschen dir locker einen Finger ab> wenn du damit eine Spindel antreibst.
:D :D
> Neben den Dupontkabeln in einem Industriegerät (ein No Go) gefällt mir> das Arduinoprogramm am wenigsten. Entweder das verwenden was dafür> entwickelt wurde: eine SPS, oder wenigstens das Kapitel Schrittketten /> Statemachine verinnerlichen.> Die Bremse wird z.B. nicht in 0 ms lösen, wenn der SM dann schon laufen> soll verliert er Schritte oder die Steuerung mit CL geht in die Störung.
Ja, dass die Kabel nicht der Hit sind nehme ich an. Stimme ich zu. Die
Bremse ist derzeit nicht aktiv bzw verbaut. Der Fehler derzeit liegt
auch ohne Bremse an.
Walter T. schrieb:> Ui! Das ist viel! Bei mir an der Drehbank hat ein Motor mit 6 Nm> 2mm/Umdrehung. Das habe ich etwas konservatv gewählt, da> Trapezgewindespindel.>> Bekomnt ihr mit einem kleineren Übersetzungsverhältnis nicht mehr auf> die geforderte Geschwindigkeit?
Doch mit Sicherheit schon. Müsste aber eben dann mit einem Getriebe am
SM realisiert werden, da Riemenscheibe kann nicht wirklich kleiner
gewählt werden...
Mfg
Felix schrieb:> Ja, dass die Kabel nicht der Hit sind nehme ich an.
halte an die weiblichen Stecker mal einen Magneten, die billigen sind
oft Eisenhaltig und leiern aus und fallen bei ein bisschen Vibration von
alleine ab.
Für die SM gibt es meist passende Planetengetriebe, aber auch da muss
man ein passendes für das hohe Drehmoment finden.
Hallo Xaver,
Xaver M. schrieb:> Walter T. schrieb:>> NemaXXX ist das Flanschmaß.> vielleicht das der Tomaten die du auf den Augen hast> https://www.rittal.com/de-de/Services/Knowledge-Base/Schutzarten
NEMA steht für “National Electrical Manufacturers Association” und ist
eine amerikanische Normungsorganisation, ähnlich dem deutschen DIN
Institut oder der ISO (International Standard Organisation). Für
Schrittmotoren ist die NEMA-Norm ICS 16-2001 „Motion/Position Control
Motors, Controls and Feedback Devices“ der relevante Standard. Und da
geht es eben nicht um IP-Rating, sondern um Baugrößen [1].
Mit freundlichen Grüßen
Thorsten Ostermann
[1]
http://www.schrittmotor-blog.de/nema-schrittmotor-was-ist-das-eigentlich/
Ich denke der Hinweis auf den Closed-Loop Treiber dürfte hilfreich sein.
Da musst du mal schauen, ob man den auf Open-Loop Betrieb
umkonfigurieren kann. Sonst hast du entweder den falschen Treiber oder
den falschen Motor gekauft. Ich halte den Motor außerdem für deutlich
überdimensioniert.
Mit freundlichen Grüßen
Thorsten Ostermann
Thorsten O. schrieb:> Ich denke der Hinweis auf den Closed-Loop Treiber dürfte hilfreich> sein. Da musst du mal schauen, ob man den auf Open-Loop Betrieb> umkonfigurieren kann. Sonst hast du entweder den falschen Treiber oder> den falschen Motor gekauft. Ich halte den Motor außerdem für deutlich> überdimensioniert.> Mit freundlichen Grüßen> Thorsten Ostermann
Hallo, habe den Motor mit Treiber als Set gekauft, daher denke ich doch,
dass das passen müsste...
Ja man kann ohne Encoder fahren, allerdings fährt er dann gar nicht
vernünftig. Denke dass evtl irgendwas in der Ansteuerung nicht passt
weshalb der Encoder das einzige ist was das irgendwie korrigiert...
Und der Motor lieber zu groß als zu klein oder?
MfG felix
Felix schrieb:> Ja man kann ohne Encoder fahren, allerdings fährt er dann gar nicht> vernünftig.
Ein passend dimensionierter Schrittmotor muss bei richtiger Ansteuerung
ohne Encoder vernünftig laufen. Wenn das nicht klappt, stimmt etwas im
System nicht.
Felix schrieb:> Der Schrittmotor hat einen integrierten Encoder, welcher direkt auf den> Motortreiber geklemmt wird.
Das hatte ich dem Datenblatt nicht entnehmen können.
Wolfgang schrieb:> Ein passend dimensionierter Schrittmotor muss bei richtiger Ansteuerung> ohne Encoder vernünftig laufen.
Das stimmt aber auch.
Was Ärger machen kann, ist wenn der Encoder nicht fest sitzt.
Felix schrieb:> Doch mit Sicherheit schon. Müsste aber eben dann mit einem Getriebe am> SM realisiert werden, da Riemenscheibe kann nicht wirklich kleiner> gewählt werden...
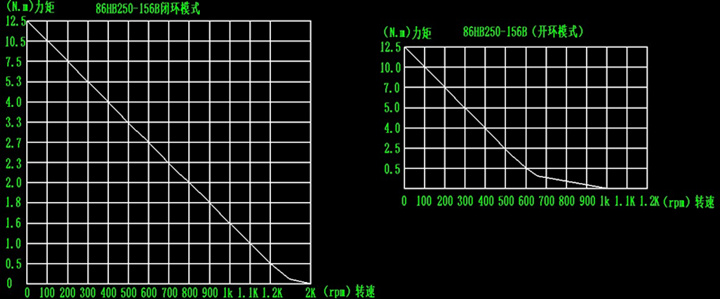
Ja, wahrscheinlich. Es bietet sich ein Riementrieb an. Bei HTD 5 x 15
bist Du ritzelseitg schon ab 13...15 Zähnen dabei. Ich würde die
Übersetzung so wählen, dass die Maximaldrehzahl, wo die
Drehmomentkennlinie einen Knick macht, der gewünschten
Verstellgeschwindigkeit entspricht. Wenn der Motor dann bei langsamem
Verfahren zu kräftig ist (Quetschgefahr), kann man ja immer noch mit dem
Strom runtergehen.
Johannes S. schrieb:> Neben den Dupontkabeln in einem Industriegerät [...]
Ich habe es mir verkniffen, aber ich stimme Dir inhaltlich zu.
Das Gute an einem Schrittmotorantrieb ist, dass er bei einem
abgefallenen Kabel nicht durchgehen kann. Nur kaputt.
Thorsten O. schrieb:> Hallo Xaver,>> NEMA steht für “National Electrical Manufacturers Association” und ist> eine amerikanische Normungsorganisation, ähnlich dem deutschen DIN> Institut oder der ISO (International Standard Organisation). Für> Schrittmotoren ist die NEMA-Norm ICS 16-2001 „Motion/Position Control> Motors, Controls and Feedback Devices“ der relevante Standard. Und da> geht es eben nicht um IP-Rating, sondern um Baugrößen [1].>> Mit freundlichen Grüßen> Thorsten Ostermann>> [1]> http://www.schrittmotor-blog.de/nema-schrittmotor-was-ist-das-eigentlich/
Besten Dank für die Info, scheint als wäre das Thema noch komplexer als
ich beim ersten mal gelesen habe, da wurde der IPXX Zusammenhang
dargestellt.
> Felix schrieb:>> Doch mit Sicherheit schon. Müsste aber eben dann mit einem Getriebe am>> SM realisiert werden, da Riemenscheibe kann nicht wirklich kleiner>> gewählt werden...>> Ja, wahrscheinlich. Es bietet sich ein Riementrieb an. Bei HTD 5 x 15> bist Du ritzelseitg schon ab 13...15 Zähnen dabei. Ich würde die> Übersetzung so wählen, dass die Maximaldrehzahl, wo die> Drehmomentkennlinie einen Knick macht, der gewünschten> Verstellgeschwindigkeit entspricht. Wenn der Motor dann bei langsamem> Verfahren zu kräftig ist (Quetschgefahr), kann man ja immer noch mit dem> Strom runtergehen.
Also schlussfolgere ich daraus, dass die Masseträgheit beim anfahren zu
hoch ist bei dieser Übersetzung? Wobei wie gesagt, es trat ein
Fehlerfall auf, bei welchem das Teil 2m Verfahrweg in einer Sekunde
zurückgelegt hat aus dem Stillstand ohne, dass der Treiber oder Netzteil
in Störung gegangen ist, also Kraft hat er schon. Sicher wäre es
sinnvoll auch wegen der höheren Genauigkeit die Übersetzung abzuändern.
Wir wären derzeit bei 1600 Microsteps bei 0,11mm pro Step, was bei
diesem Zweck völlig ausreichend wäre.
Bei der Diskussion haben wir allerdings einen Punkt außen vor gelassen,
der nicht im "Schaltplan" eingezeichnet ist: Den Stützkondensator. Was
ist da eigentlich verbaut? Der Teil ist ja schon bei den
Original-Meanwell-Netzteilen etwas knifflig, weil die keine kapazitive
Last vertragen. Ich weiß nicht, wie es bei den Klonen aussieht.
Walter T. schrieb:> Bei der Diskussion haben wir allerdings einen Punkt außen vor> gelassen, der nicht im "Schaltplan" eingezeichnet ist: Den> Stützkondensator. Was ist da eigentlich verbaut? Der Teil ist ja schon> bei den Original-Meanwell-Netzteilen etwas knifflig, weil die keine> kapazitive Last vertragen. Ich weiß nicht, wie es bei den Klonen> aussieht.
Welcher Stützkondensator? Ich habe keinen verbaut oder befindet sich
einer im Treiber?
Felix schrieb:> Welcher Stützkondensator? Ich habe keinen verbaut
Nicht schlimm. Hauptsache Marvin hat einen verbaut.
Felix schrieb:> oder befindet sich> einer im Treiber?
Meistens nicht groß genug. Die Endstufen ziehen ordentlich Spitzenstrom.
Es sind ja Abwärtswandler.
Walter T. schrieb:> Felix schrieb:>>> Welcher Stützkondensator? Ich habe keinen verbaut>> Nicht schlimm. Hauptsache Marvin hat einen verbaut.> Felix schrieb:>>> oder befindet sich>> einer im Treiber?>> Meistens nicht groß genug. Die Endstufen ziehen ordentlich Spitzenstrom.> Es sind ja Abwärtswandler.
Hardware ist dann doch eher mein Part :D also sollte ich da was
nachrüsten...Von welcher Größenordnung sprechen wir hier als
Stützkondensator? Bzw. ich werde heute mal die Spannung mit dem Oszi
betrachten und schauen was da passiert...
Felix schrieb:> Von welcher Größenordnung sprechen wir hier als> Stützkondensator?
Da kann ich Dir keinen Rat geben, da das von der Schaltfrequenz abhängt.
Ich habe bei mir für drei Endstufen 10000µF verbaut, aber meine
Endstufen sind etwas älter und haben wahrscheinlich eine niedrigere
Schaltfrequenz.
Das das Netzteil spezifikationsgemäß bei der Ausgangskapazität verrückt
gespielt hat, war dann noch ein Soft-Start mit NTC und Relais fällig.
Aber vielleicht ist das bei euch nicht nötig.
Walter T. schrieb:> Aber vielleicht ist das bei euch nicht nötig.
Man könnte mal die Versorgungsspannung messen: wie sieht die am Netzteil
aus und wie an der Endstufe? Am Besten misst man das mit einem
Oszilloskop. Und dann wird man die dünnen 1mm² (oder noch weniger)
Sicherungsdrähte gegen welche mit halbwegs brauchbarem Querschnitt
tauschen.
Walter T. schrieb:> Die Endstufen ziehen ordentlich Spitzenstrom.> Es sind ja Abwärtswandler.
Weil es Abwärtswandler sind, fließt in der "Ein" Phase durch die
Kondensatoren genau der selbe Strom wie durch den Motor. Und auch den
kann man messen.
BTW: ich würde übrigens die Drähte der Versorgung (und die zum Motor,
und auch die zum angesprochenen Stützkondensator) ganz eng beieinander
führen oder gar verdrillen. Das sorgt dafür, dass du keinen Störsender
baust, der fröhlich in der Gegend herumfunkt. Stichworte dazu sind:
Leiterschleife, Störungen, Antenne