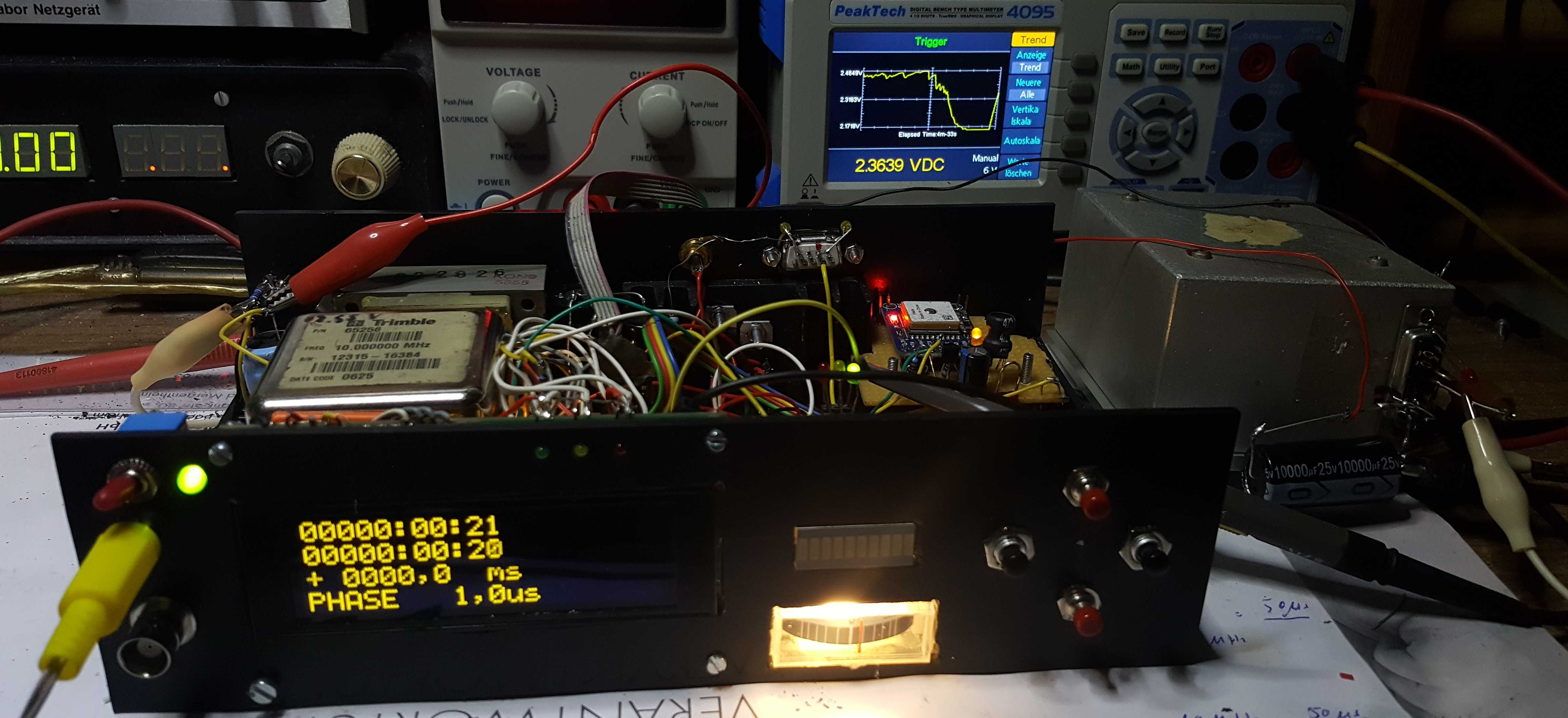
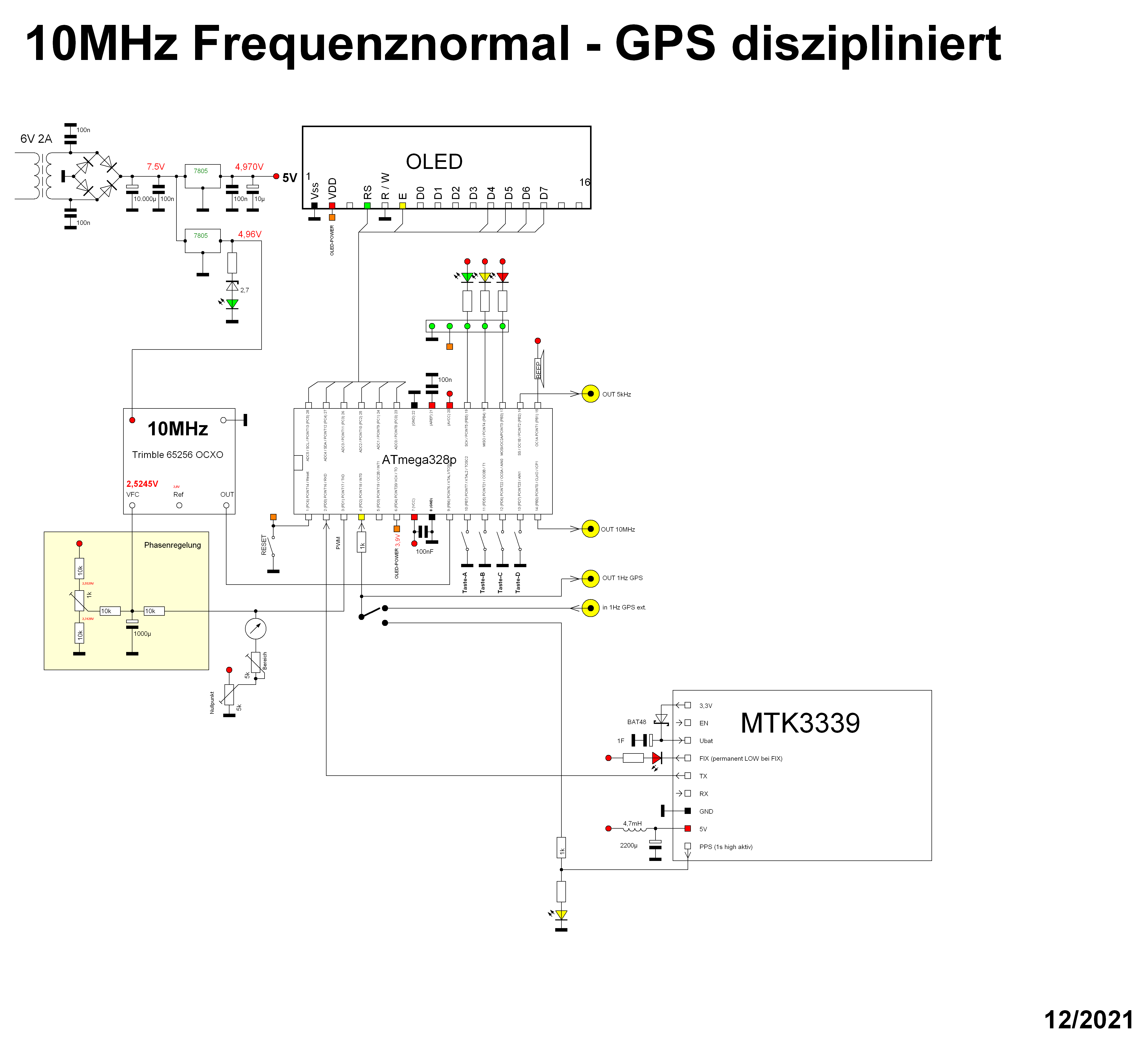
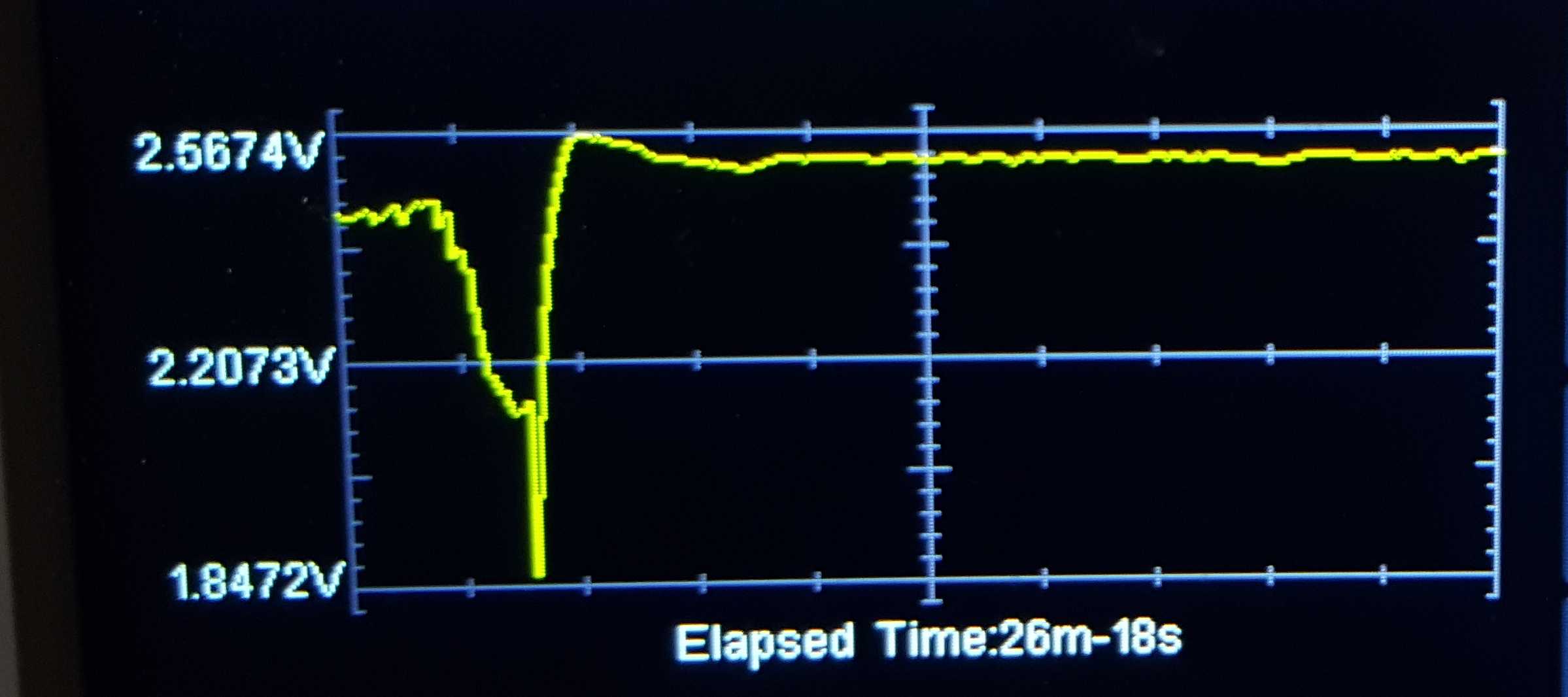
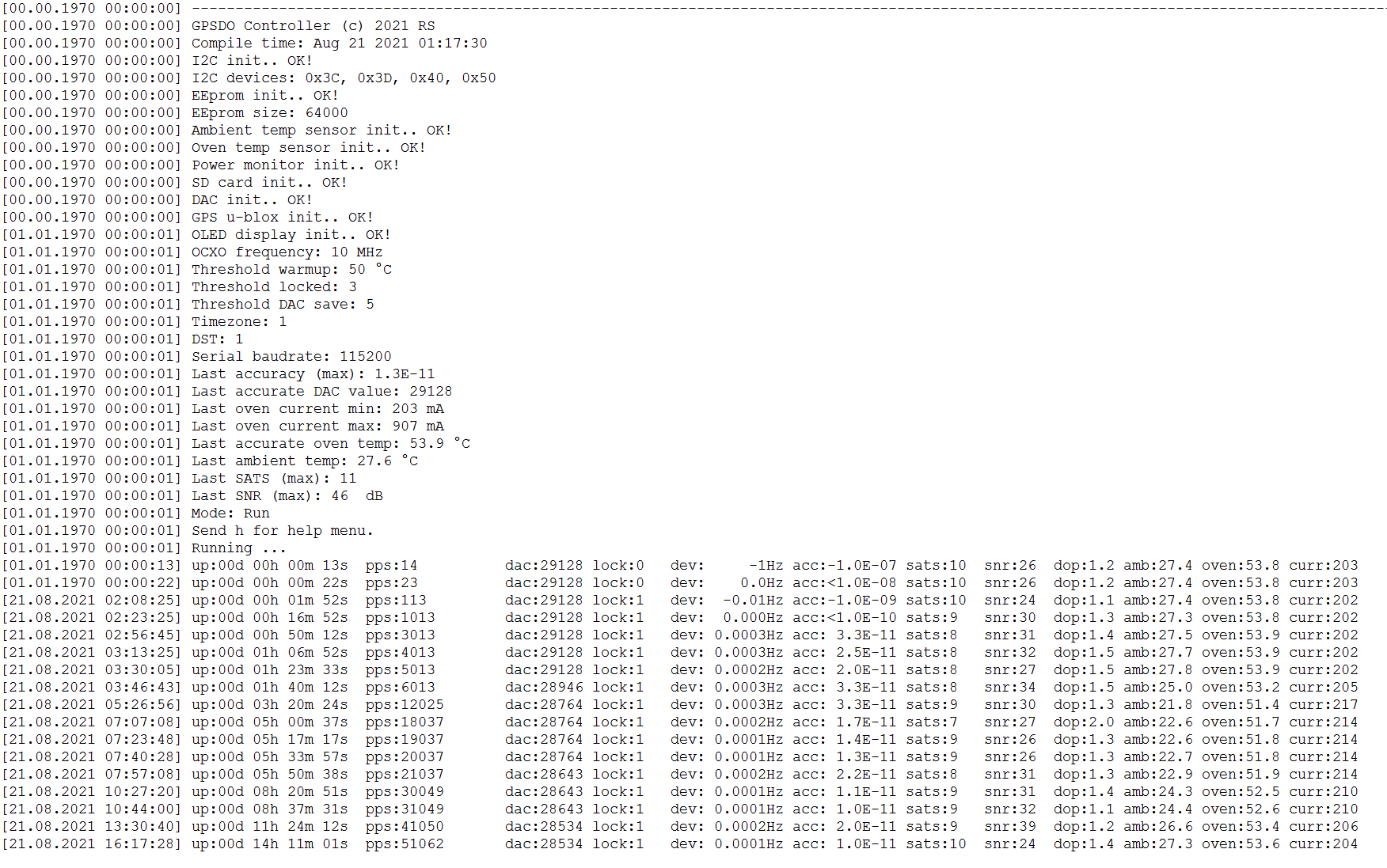
Ein kleines Beispiel eines 10MHz Frequenznormals mit GPS-Anbindung. Das Prinzip ist ganz einfach. Ein 10MHz Trimble 65256 OCXO Oscilator taktet einen ATmeg328p. Dieser generiert ein 1Hz Singal, welches mit dem sehr genauen 1 Sekunden Impuls des GPS-Empfängers verglichen wird. Nun erfolgt ein Phasenverkleich beider Signale und die Regelspannung wird feinfühlig am VFC Eingang des Ofens nachgereglt. Als Vergleich diente ein Rudium Frequenznormal. Beitrag "10MHz Frequenznormal Rudium Efratom WP-92066 FRC Stecker Anschlussbelegung Datenblatt Tipps Hinweise" Das Rudium-Modul ist später nicht mehr nötig gewesen, beide Signale liefen erwartungsgemäß synchron. Selbst, wenn der GPS-Impuls mal kurz ausfällt, die Frequenz und Phase bleibt einige Minuten brauchbar. Bleibt die Regelspannung nahezu konststant, dann hat ich das System eingeschwungen.
Angehängte Dateien:
-

Versuchsaufbau.jpg
480 KB -

Schaltung.png
130 KB -

Regelspannung_am_VFC.jpg
85 KB
:
Bearbeitet durch User
Hallo Sebastian, Glückwunsch zur gelungenen Konstruktion! Die Einfachheit Deines Konzepts ist schwer zu überbieten. Bin übrigens auch über die kurze gezeigte Einregelzeit beeindruckt. Mein eigener GPSDO mit PIC braucht da bei normaler Integrationszeitkonstante einige Stunden um stabil zu werden. Gruß, Gerhard
Bernhard S. schrieb: > Ein kleines Beispiel eines 10MHz Frequenznormals mit > GPS-Anbindung. > ... > > Selbst, wenn der GPS-Impuls mal kurz ausfällt, die Frequenz und Phase > bleibt einige Minuten brauchbar. > > Ein Vorschlag: Ändere Deine FW so, daß bei Ausfall des GPS Timing Signals bis zur Wiederkehr des GPS PPS Signals einfach der letzte gute PWM Wert statisch ausgegeben wird um den OCXO für die Zeit des GPS Ausfalls stabil und genau genug zu halten. Das wäre höchstwahrscheinlich eine nützliche Modifikation.
Bernhard S. schrieb: > erfolgt ein Phasenverkleich Bernhard S. schrieb: > beide Signale > liefen erwartungsgemäß synchron. ... da bleiben einige Fragen, da synchron hier zu verstehen ist als in den Grenzen der Toleranz des Phasenvergleichers und der dürfe eher bescheidene Werte haben hinsichtlich der verwendeten 328p HW/SW Möglichkeiten zum Phasenvergleich. Was hast du für den Vergleich an HW/SW Resourcen konkret benutzt? Hast du die Toleranzkette/-bereich betrachtet, zeige auch mal die SW dazu. Was bedeutet der Vergleich mit deiner Rubidium Ref., hast du Daten aufgezeichnet sowie stat. ausgewertet zur Frequenz-/Phasenablage oder eher mit dem nassen Finger die Treffer erkannt?
Bernhard S. schrieb: > Das Prinzip ist ganz einfach. Im richtigen Leben der Technik dazu eher nicht, am Küchentisch läuft es gut, mein Wecker ist jetzt ja atomgenau ... Mit den Messmitteln und Methoden, die hier durchblicken ist die Aussage sehr gewagt bzw. naiv, aber das sind wir Menschen ja von Natur aus. Das hilft uns zu überleben im (Technik-)Jungle.
GPS-PPS, Rubidium und Quarz? Rubidium ist dabei überflüssig, das kann ich mir auch nicht leisten, da die meisten Rb-Normale aus der Bucht nach Aussonderung wegen überschrittenem Haltbarkeitsdatum nur noch VIELLEICHT präzise sind. Vergleicht man bei einem µC mit 16-Bit-Zählern die heruntergeteilte Quarz-Sekunde mit dem GPS-PPM, lässt sich der Quarzoszillator über 16-Bit-PWM, Tiefpass und VariCap recht feinfühlig auf < 0,1 ppm an die PPS-Genauigkeit heranführen. Bei passendem AVR mit Input-Capture reicht dafür ein Counter. Sobald der GPS-Empfang schwächelt, wird die Frequenzregelspannung gehalten. Dann sind 1 ppm bei halbwegs stabilen Umgebungsbedingungen über eine gewisse Zeit (die interne Temperaturmessung, die Erfassung der Versorgungsspannung und Zeitmessung bietet dafür Entscheidungshilfe) weiterhin recht sicher. Diese Zustände (unbekannt, 1 ppm / 0,1 ppm) kann man auch anzeigen und beim Gebrauch auswerten. Mehr dürfte das obengenannte Konzept auch nicht liefern.
Jetzt möchte ich von einen anderen Blickwinkel etwas in den Topf der Argumente werfen. Vorerst, es ist klar, daß für professionelle Anwendungen strengere Randbedingungen herrschen. Andrerseits betreibt Bernhard das als Hobby wo man gewisse Abstriche zu machen willig ist. Auch wenn die kurzzeitigen Abweichungen die der kommerziellen Version überschreiten, kann man davon ausgehen, daß im Mittel bestimmt um 1E-9 erreicht werden können und wahrscheinlich besser. Die täglichen mittleren Abweichungen über 24 Stunden dürften sogar deutlich niedriger liegen. Als Funkamateur bin ich vielleicht nur interessiert meine Funkgeräte überwachen zu können und Frequenzzähler u.a. Messgeräte nachzujustieren. Als Zeitbasis würde dann die Abweichung nur +/- 1Hz bei 1GHz betragen. Damit können viele Menschen leben. Als Arbeitsstandard dürfte Bernhards GPSDO also durchaus seinen Zweck gut erfüllen. Wenn Bernhard ambitioniert ist, kann er sich ja weiter damit beschäftigen und die Grenzwerte einengen bzw. verbessern. Abgesehen davon braucht Bernhard einen entsprechend guten Vergleichsstandard. Un da dürfte der Rubidium seine einzige Option sein vorausgesetzt er funktioniert noch gut. Persönlich finde ich es nicht als fair, dieses Projekt mit Industriegeräten zu vergleichen und speziell nach Haaren in der Suppe zu fischen. Die findet man mit einen fein genug Kamm immer. Man muß ja auch erst Erfahrungen sammeln. Wenn die Abstimmempfindlichkeit des OCXO durch entsprechende Schaltungsmaßnahmen genügend klein gemacht wird, sind auch 16-bit ausreichend um die Frequenz um +/- 0.5Hz verschieben zu können. Das ist dann immerhin besser als 1E-10 Einstellauflösung. Durch FW Algorithmen kann man ja noch integrieren und die Stabilität trotz Jitter zu verbessern. Der Timing Jitter handelsüblicher Consumer GPS Empfänger ist ja auch nicht sehr gut. Spezielle, für GPSDO gedachte Empfänger haben diesbezüglich deutlich bessere Werte und viel weniger Jitter. Gewisse Rockwell Jupiter Navman Empfänger z.B. kann man da nennen. Bei den üblichen Jitterwerten dürfte sogar die Auflösung des ATMEGA328 ausreichen. Ohne Mittelung geht es ja eh nicht. Ich vertrete jedenfalls die Ansicht, daß Bernhard noch lange nicht die HW Grenzen seiner Schaltung erreicht hat. Wie gesagt ist das nur meine Meinung und Eure Argumente sind ja zutreffend. Aber schließlich wurde Rom nicht an einen Tag aus dem Erdboden gezaubert.
Bernhard S. schrieb: > Bleibt die Regelspannung nahezu konststant, dann hat ich das System > eingeschwungen. Das sagt leider wenig aus. Da ein OCXO nach dem Einschalten erst einmal auf Temperatur kommen muß, ist die Regelung anfangs ja auch völlig außer Tritt. Interessant sind die eff. Ausgangsfrequenz und die entsprechende Kurve dazu. Vielleicht hast Du die Möglichkeit, die Frequenz aufzuzeichnen, um die Kurzzeitstabilität zu sehen (und ggf. Regelschwingungen).
Bernhard S. schrieb: > Das Prinzip ist ganz einfach. Nun ja, man kann so etwas ganz einfach halten, muß sich dennoch so einige Gedanken drüber machen. Hier mal einige Gedanken meinerseits: Deine gesamte Schaltung ist ausgelegt für Frequenz- und Phasengleichheit. Für die Referenzerzeugung braucht es jedoch nur die Frequenzgleichheit, die Phase ist eigentlich egal. Zum zusätzlichen Erreichen der Phasengleichheit braucht es eine zusätzliche Einschwingzeit und eine passende Regelcharakteristik, sonst kommt das Ganze recht leicht ins Schwingen. Das bemerkt man wegen der Langsamkeit jedoch erst dann, wenn man die Regelabweichung über einige Tage aufzeichnet. Ich habe da eigene (und mir eher unangenehme) Erfahrungen. Deine Nachregelung des OCXO erfolgt rein softwaremäßig. Kann gut gehen, ist hier aber nicht weiter erklärt. Tastest du die Nachstellung aus, wenn das Referenzsignal mal fehlt? Oder rennt dann deine Regelung davon? Obendrein ist dein manuell einstellbarer Nullpunkt mit einem Spannungsteiler von der Betriebsspannung des OCXO gegen GND gemacht. Den eigenen Referenzausgang des OCXO benutzt du gar nicht. Hat das Gründe? W.S.
Gerhard O. schrieb: > Als Arbeitsstandard dürfte Bernhards > GPSDO also durchaus seinen Zweck gut erfüllen. Wenn Bernhard > ambitioniert ist, kann er sich ja weiter damit beschäftigen und die > Grenzwerte einengen bzw. verbessern. Abgesehen davon braucht Bernhard > einen entsprechend guten Vergleichsstandard. Un da dürfte der Rubidium > seine einzige Option sein vorausgesetzt er funktioniert noch gut. Rubidium ist, was die Kurzzeit-Stabilität angeht, einem guten OCXO unterlegen. Ein GPSDO vereint die Vorteile eines OCXO (Kurzzeit-Stabilität) mit der von GPS (absolute Genauigkeit von Cäsium). Mit einer ungeeigneten Nachführung des OCXO verliert man leicht dessen Vorteile. > Der Timing Jitter handelsüblicher Consumer GPS Empfänger ist ja auch > nicht sehr gut. Spezielle, für GPSDO gedachte Empfänger haben > diesbezüglich deutlich bessere Werte und viel weniger Jitter. Dass ein bestmöglicher GPS-Empfang hilfreich ist (u.A. freistehende Aussenantenne), wurde selbst hier schon mehrfach erwähnt. Wobei, absolut gesehen, der GPS-Jitter (Kurzzeitstabilität) durch den OCXO aufgefangen wird - so das Konzept der Nachführung stimmig ist. Früher (tm) hatte man OCXO's an DCF (die besten Caesium's wo's gibt) angebunden. Das war tricky - solange man nicht direkt von Mainflingen saß. Dagegen sind die heutigen GPS-Zeitzeichen sehr leicht zu handeln. > Persönlich finde ich es nicht als fair, dieses Projekt mit > Industriegeräten zu vergleichen und speziell nach Haaren in der Suppe zu > fischen. Die findet man mit einen fein genug Kamm immer. Man muß ja auch > erst Erfahrungen sammeln. Du als Funkamateur solltest es eigentlich besser wissen: Man baut sich Messtechnik selbst, weil man es kann - in sehr vielen Fällen mit besseren Resultaten, als es manche Industrietechnik zu leisten vermag. Mit einem "Tut-ja-Irgendwie" sollte man sich daher nicht zufriedengeben. Das war IMHO die einzige Kritik an Bernhards Konzept: Genügt den Ansprüchen an einen Eigenbau nicht. just my 2ct
W.S. schrieb: > Hier mal einige Gedanken meinerseits: > Deine gesamte Schaltung ist ausgelegt für Frequenz- und > Phasengleichheit. Für die Referenzerzeugung braucht es jedoch nur die > Frequenzgleichheit, die Phase ist eigentlich egal. > > Zum zusätzlichen Erreichen der Phasengleichheit braucht es eine > zusätzliche Einschwingzeit und eine passende Regelcharakteristik ... Ich hatte schon ganz ähnliche Anforderungen (allerdings nur im ppm-Bereich), habe damals einen „fast-sync“ eingeführt, auch weil es schnell gehen musste. So ein „fast-sync“ war ein schwerer Eingriff ins Timing, war daher nur beim Booten zulässig. Ich konnte das implementieren über den Reset einer (sowieso vorhandenen) Zählerkette, ausgelöst durch den 1pps der Referenz. Danach war das Ding so gut wie synchron. Gestartet wurde dann über eine „gespeicherte“ Regelspannung für den TCXO. Für einen GPSDO würde ich mir vermutlich ein Schieberegister gönnen (oder den Teiler 10MHz -> 1Hz anzwacken) und erst mal die Phase, bis auf wenige 1/10 us, einregulieren. Erst wenn das passt, auf den Frequenzregler umschalten, besser aber noch zuwarten, bis die Temperatur des Quarzofens eingeschwungen ist. Ohne log-Speicher würde ich so was nicht realisieren wollen. Das wird sonst zu sportlich ... Nein - ich habe nicht vor, sowas zu bauen! Hannes
Ein paar Aussagen sind nicht ganz so richtig. Ein Rubidium Normal aus der bucht ist deshalb so guenstigt weil es schon Lebensdauer drauf hat. Die Genauigkeit von 10^-10 bleibt bis zum Schluss. Nur nimmt die Zuverlaessigkeit ab. Bei Erreichen der Lebensdauer ist 1/e der Module ausgefallen, oder so. Wenn eine Anwendung also maximale Zuverlaessigkeit als Anforderung hat, wechselt man die Module gegen die Haelfte der Lebensdauer aus. In einem Lab, sind die Bedingungen sowieso besser, daher haelt es noch sehr lange. Der Sekundenpuls eines GPS hat einen spezifizierten Jitter von vielleicht 100ns oder so. Daher muss man ueber viele Perioden mitteln. Ich wuerd mal mit einem (digitalen)Tiefpass von 1000 sekunden (=Viertelstunde) beginnen. Ein 10MHz OCXO hat meist einen Regelbereich von 4.6ppm, eine Erfordernis von Stratum 3.
Die üblichen GPS Empfänger Module habe ganz normale Oszillatoren von denen der Sekundenimpuls abgeleitet wird. Erst nach dem Empfang der Nachricht vom Satelliten kennt das Modul die genaue Zeit. Das führt zu einer Sägezahn förmige Schwankung der Phase. Bei vielen GPS Empfänger kann man die Differenz zwischen Beginn des letzten Impulses und der GPS Zeit abfragen und kann das dann per Software etwas glätten. Schau mal hier : http://www.leapsecond.com/pages/m12/sawtooth.htm sind zwar etwas ältere Empfänger aber das Prinzip ist gleich geblieben. Deine Schaltung hat eine Auflösung von 100ns zusätzlich evtl. +/- 1 Takt durch das einsynchronisieren des capture Signales. Da handelst du dir vielleicht mehr Probleme ein wie du löst. Warum willst du unbedingt die Phase synchronisieren ?. OCXOS starten zwar im Minutenbereich aber bis sie ihre Genauigkeit erreicht haben dauert es Stunden. Lies mal in den Datenblättern was da für Zeiten angegeben werden. Im Datenblatt vom HP10811 steht zum Beispiel: Final value is defined as frequency 24 hours after turn-on. http://hparchive.com/Manuals/HP-10811AB-Manual.pdf
Hier liegen ein paar ziemlich alte Trimble OEM-Empfänger. Die flogen beim erste WNRO (im August 1999) aus ein paar Geräten raus. Verbaut ist da ein RACON TXO4080 mit 16.368MHz (16*1.024MHz - wieso erklär ich jetzt aber nicht). Der ist gelistet als TCXO mit: - Temperaturgang zwischen −40...85 degC.: max +/- 2.0ppm - Long term stability über 1 Jahr: typ +/- 0.4ppm, max +/- 1.0+/-ppm. Selbst mit so 'nem alten Geraffel sollte das Sawtooth-Problem nicht auftreten. Und wenn schon, die wenigen 10ns Jitter filtert die Regelschleife weg. Kurzzeit-Stabilität von GPS - das bekommt man besser hin. Ist aber auch egal, schließlich tat's früher sogar DCF. Aber Du hast reacht: Das müsste man mal nachmessen ...
Angehängte Dateien:
-

meas.png
75 KB
Wenn Du Dich mal 3 Jahre lang in das Thema hineingefuchst hast, dann bekommst Du so eine schöne Ausgabe, wie im Anhang.
Worin siehst du hier die Aufgabe? Pandur S. schrieb: > Nur nimmt die > Zuverlaessigkeit ab. Bei Erreichen der Lebensdauer ist 1/e der Module > ausgefallen, oder so. Wenn eine Anwendung also maximale Zuverlaessigkeit > als Anforderung hat, wechselt man die Module gegen die Haelfte der > Lebensdauer aus. Ist das deine Strategie oder allgemein die Euro im Lab? Ich nehme an, dass hier ist derselbe thread? Beitrag "10MHz Frequenznormal Rudium Efratom WP-92066 FRC Stecker Anschlussbelegung Datenblatt Tipps Hinweise" Da ich auch an so einem Normal interessiert bin, wäre ich an einer Quelle für ein gutes, wenig gealtertes Modul interessiert. Ich hatte bis vor Kurzem eine Quelle, aber seit Ende Februar meldet sich der VK aus seinem Heimatland nicht mehr. Gründe: Siehe Weltnachrichten.
Ralf S. schrieb: > Wenn Du Dich mal 3 Jahre lang in das Thema hineingefuchst hast, dann > bekommst Du so eine schöne Ausgabe, wie im Anhang. Hi Ralf, hübsche Ausgabe. Kannst du etwas mehr zu deinem Design sagen. Mikrocontroller, OCXO, Software, PLL... ? Mein GPSDO basiert auf einem STM32, ein Interpolator lässt die Phase der 1PPS Pulse mit circa 55ps Auflösung messen. Die Software habe ich mit FreeRTOS aufgebaut, siehe hier https://github.com/tcpluess/gpsdo die Schematics könnte ich da auch mal noch hochladen. Gerhard O. schrieb: > in übrigens auch über die kurze gezeigte > Einregelzeit beeindruckt. Wenn man die Phase misst, so wie der TO, und nicht die Frequenz, dann kann dies durchaus rasch einschwingen. Mein GPSDO funktioniert im Prinzip genauso wie der des TO. Aus dem OCXO-Takt wird der 1PPS Puls abgeleitet. Dann muss man "irgendwie" das Zeitintervall zwischen dem "eigenen" 1PPS und demjenigen des GPS-Moduls messen. Diese Messung sollte möglichst hochauflösend sein. Dieses gemessene Zeitintervall wird dann einem PI-Regler zugeführt und kann vorab noch, wenn man will, digital tiefpassgefiltert werden. Warum die Zeitmessung hochauflösend sein muss: ganz einfach, wenn da nur z.B. 100 ns Auflösung sind, und dein 1PPS irgendwann "in die Nähe" desjenigen des GPS kommt, dann wird die Messung "blind" und man sieht nicht mehr, ob es driftet oder nicht. Der Regler kann nicht mehr agieren, wenn das Zeitintervall klein wird. Mit einem Interpolator, z.B. TDC7200, kann man dieses Zeitintervall mit einer viel höheren Auflösung messen. Die absolute Genauigkeit ist dabei nicht mal so extrem wichtig, aber dank der Auflösung sieht man wesentlich besser, ob die Frequenz stabil ist, oder immer noch wackelt. Bei genügend SATs hat mein GPSDO nach 10min einen Lock, wenn der OCXO schon aufgewärmt ist schon nach weniger als 1min. "Lock" bedeutet dabei, dass der 1PPS Puls, der aus dem OCXO abgeleitet wird, weniger als +/-100ns von der GPS-Zeit abweicht und innerhalb dieser Grenzen bleibt. In diesen Videos https://hb9fsx.ch/files/gpsdo/measurement/videos/ habe ich mal das Oszilloskop im Zeitraffer gefilmt. Auf dem einen Kanal ist der GPSDO, auf dem anderen ist ein Rubidium bzw. ein kommerzieller GPSDO. Beim Vergleich zweier GPSDOs sieht man deutlich, wie die Phase ein wenig hin und her wandert. Beim Vergleich mit dem Rb ist das ganze viel stabiler. Die Kamera zeichnet 1 Bild pro Sekunde auf, also das Video ist durchaus über einen länglichen Zeitraum aufgezeichnet.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.