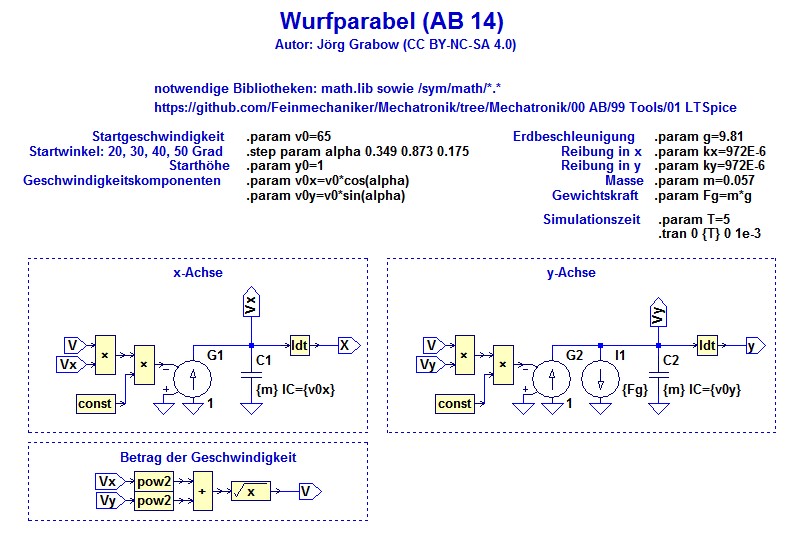
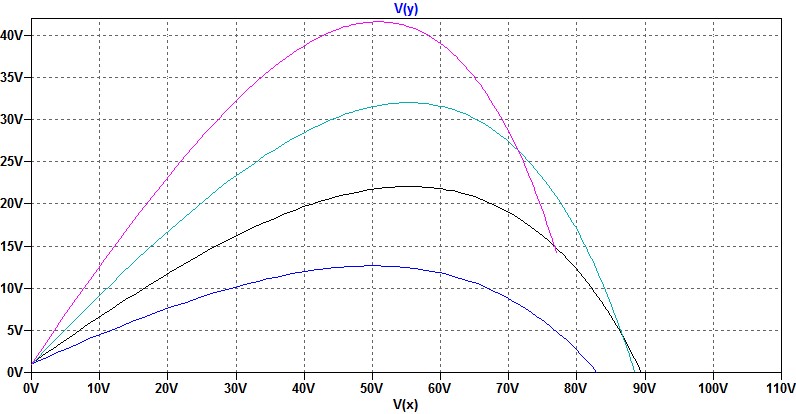
Im laufe der Jahre haben sich bei mir unterschiedliche Aufgaben und Lösungen zur Mechatronik angesammelt. Viele Aufgaben und Lösungen entstanden mit der Methode der konzentrierten Ersatzelemente. Dazu bietet sich das Simulationssystem LTSpice sehr gut an. Da oft ähnliche Fragestellungen hier im Forum auftauchen, stelle ich mal in loser Folge meine Aufgaben und Lösungen hier rein. Vielleicht hilft es dem Einen oder Anderen bei seinen Problemen etwas weiter oder gibt Anregungen für eigene Lösungen. Gruß Joe Zum Start das Modell und die Lösung eines schrägen Wurfes mit Newton’scher Reibung.
Angehängte Dateien:
-

LAB_14_1.jpg
110 KB -

LAB_14_2.jpg
80 KB
Letztendlich hast Du Dir einen Analogrechner gebaut. Damit kann man sowas machen: https://www.analogmuseum.org/deutsch/examples/ Das Beispiel mit den Stromlinien um das Joukowski-Profil ("Tragfläche") ist eindrucksvoll. So hat man tatsächlich mal Geometrien optimiert, bevor der Modellbauer ran musste und es in den Windkanal ging.
Angehängte Dateien:
-

lab14-alternative.png
34 KB
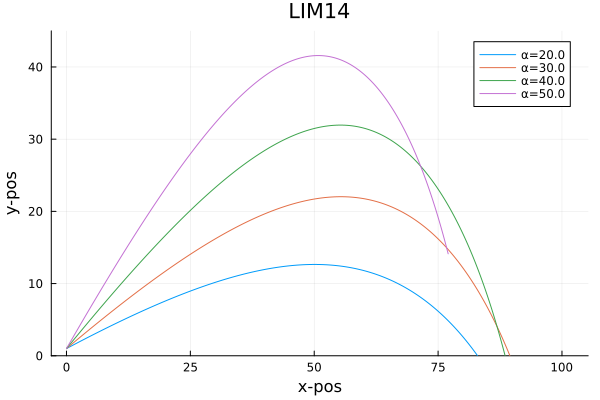
Hallo Joe, Danke erstmal für Deinen Beitrag. Ja, es stimmt. Man kann Probleme der Mechanik, ... mit einem Werkzeug das eigentlich für Simulation von Schaltungen erdacht wurde lösen. Jedoch es erfordert ein Umdenken, was vielleicht für Einsteiger/Studenten eine Hürde sein könnte. Ich selbst habe LTspice nie verwendet, und habe auch etwas Zeit gebraucht um die Aufgabe JULIA abzusetzen. Ich denke man sieht hier sofort das zu lösende physikalische Problem.
1 | LAB14 = Model( |
2 | gravity = -9.81, |
3 | mass = 0.057, |
4 | kxy = 972e-6, |
5 | |
6 | pos = Var(start=[0.0, 1.0]), |
7 | vel = Var(start=[0.0, 0.0]), # wird geändert |
8 | acc = Var(start=[0.0, 0.0]), |
9 | |
10 | equations = :[ |
11 | vel = der(pos) |
12 | acc = der(vel) |
13 | friction = kxy*vAbs^2*unit |
14 | acc = [0.0, gravity] - friction/mass |
15 | vAbs = norm(vel) |
16 | unit = vel/vAbs ] |
17 | ) |
Grüsse
Könntest du das vollständige Julia-Script posten? Hier fehlen denke ich ein paar Imports.
Christoph M. schrieb: > Könntest du das vollständige Julia-Script posten? Hier fehlen denke ich > ein paar Imports. klar. Alternativen: * MODELICA (tool: OpenModelica) * ModelingToolkit (Julia) * ... * Simulink * ... nach vielen Jahren MODELICA versuche ich jetzt den JULIA Ansatz. Erfordert ein Umdenken, ist aber spannend.
Vielen Dank für die Kommentare und den Julia-Ansatz! Der Ansatz über konzentrierte Ersatzelemente hat aus meiner Sicht den Vorteil sehr einfach unterschiedliche physikalische Systeme miteinander koppeln zu können. So kann ich mit LTSpice in einer Schaltung ein elektrisches, mechanisches, thermisches und fluidmechanisches System aufbauen. Ich gebe zu meinen Aufgaben auch parallel oft die analytische Lösung an (siehe Anlage). Somit kann ein Interessent bei Bedarf auch sein entsprechendes CAS-System verwenden. Alle Infos zu den Aufgaben und Lösungen hier: https://github.com/Feinmechaniker/Mechatronik/tree/Mechatronik/00 AB
>Der Ansatz über konzentrierte Ersatzelemente hat aus meiner Sicht den >Vorteil sehr einfach unterschiedliche physikalische Systeme miteinander >koppeln zu können. Das ist wahr. Ich verwende LtSpice sehr gerne. Vielleicht könntest Du noch mal den Link auf die LtSpice-Bibliothek hier anfügen, aus dem ScreenShot lässt sie sich ja nicht kopieren. >So kann ich mit LTSpice in einer Schaltung ein >elektrisches, mechanisches, thermisches und fluidmechanisches System <aufbauen. OpenModellica wäre übrigens für die Simulation der unterschiedlichen physikalischen Systeme gemacht und bietet für viele Domänen angepasste Blöcke. Ich habe eine zeitlang damit experimentiert, aber im Vergleich zu LtSpice ist das Ding fast nicht in den Griff zu kriegen. Man muss so viele Seiteeffekte und Einstellungen und dass der Solver konvergiert ist auch nicht einfach.
Angehängte Dateien:
-

LAB_15_1.jpg
35 KB -

LAB_15_2.jpg
110 KB
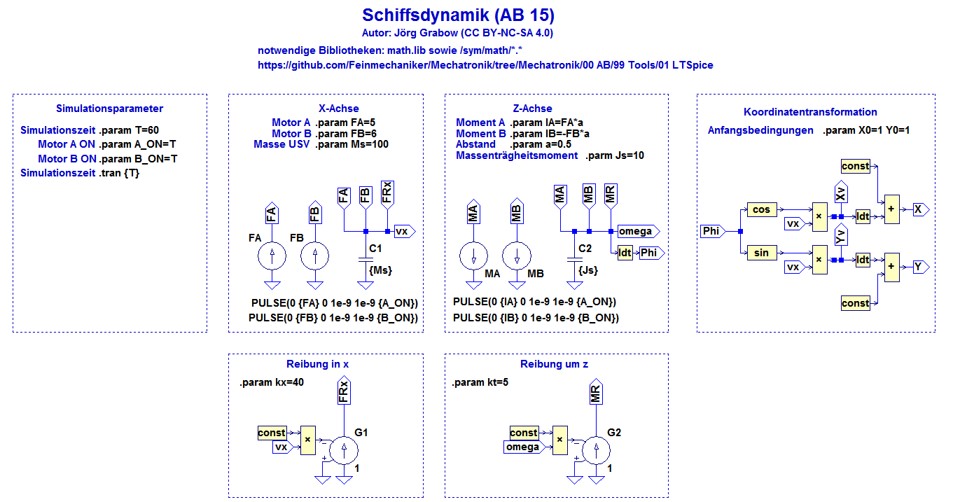
Heute das dynamische Modell eines Katamarans mit zwei Antriebsmotoren. Berücksichtig wird die Reibung in Bewegungsrichtung sowie um die Hochachse. Effekte wie Driftkräfte durch Wind und Wellen bzw. Strömungen sind im LTSpice-Modell nicht berücksichtigt, jedoch im mathematischen Modell (LAB_15.pdf) enthalten. Die verwendeten Bibliotheken für LTSpice liegen hier: https://github.com/Feinmechaniker/Mechatronik/tree/Mechatronik/00 AB/99 Tools/01 LTSpice die Aufgabenstellung hier: https://github.com/Feinmechaniker/Mechatronik/tree/Mechatronik/00 AB die Lösung hier: https://github.com/Feinmechaniker/Mechatronik/tree/Mechatronik/00 AB/01 Lösungen
Mal kurz eine administrative Frage: Unter welchem Namen installiert man die Library am besten? Ich habe gerade festgestellt, dass ich mal vor einiger Zeit die LtSpiceControlLibray installiert habe: https://github.com/kanedahiroshi/LTspiceControlLibrary
Bei mir heißt sie Math.lib, aber prinzipiell kann man ihr jeden beliebigen Namen geben. Allerdings zeigen die zugehörigen Symbole auch auf Math.lib. Man müßte auch hier den Namen ändern.
Angehängte Dateien:
-

LAB_13_1.jpg
100 KB -

LAB_13_2.jpg
87 KB
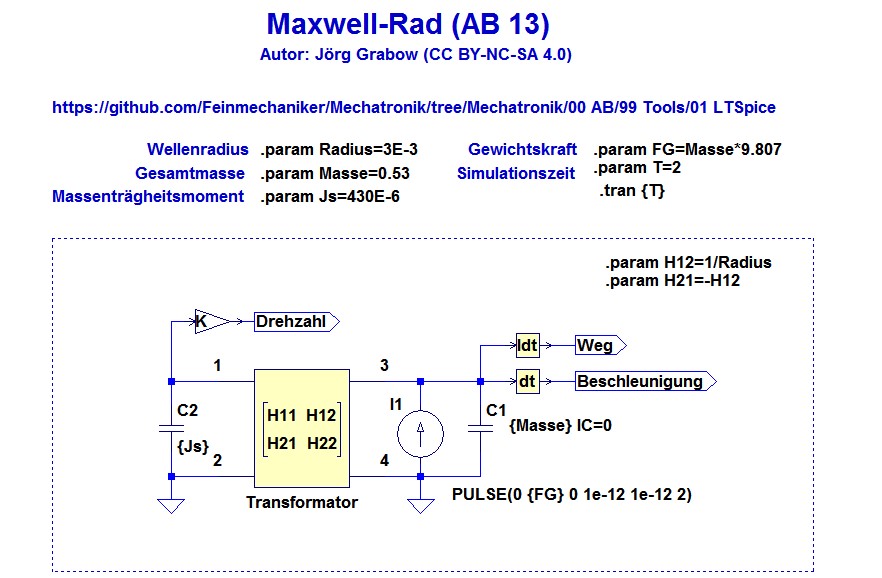
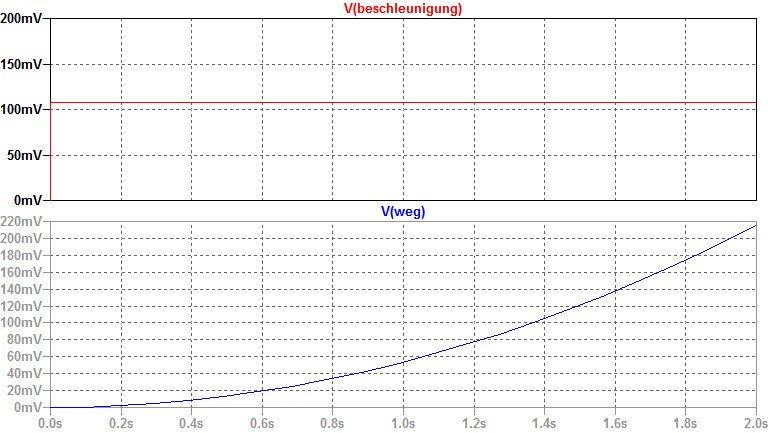
Hier mal das Modell eines Maxwell-Rades. Der Versuch ist auch sehr schön unter [1] beschrieben. Dieses Modell bietet sich an, um die Verkopplung von translatorischen und rotatorischen Systemen über einen Wandler (Transformator) zu beschreiben. Aufgaben, Modelle und Lösungen wie immer hier: https://github.com/Feinmechaniker/Mechatronik/tree/Mechatronik/00 AB [1] Beitrag "Re: Physikprojekte"
Ich hätte eine Frage: Gibt es schon ein Modell für einen DC-Gleichstrommotor mit den verschiedenen Paramter wie L,R,Trägheitsmoment,Torqueconst usw. ? Das schöne ist ja, dass ich beim Motor das elektrische und mechanischen mischen und es wäre hoch interessant, weil man dann z.B. einen Geschwindigkeitsregler simulieren könnte.
Angehängte Dateien:
-

LAB_17_1.jpg
93 KB -

LAB_17_2.jpg
76 KB -

LAB_17_3.jpg
64 KB
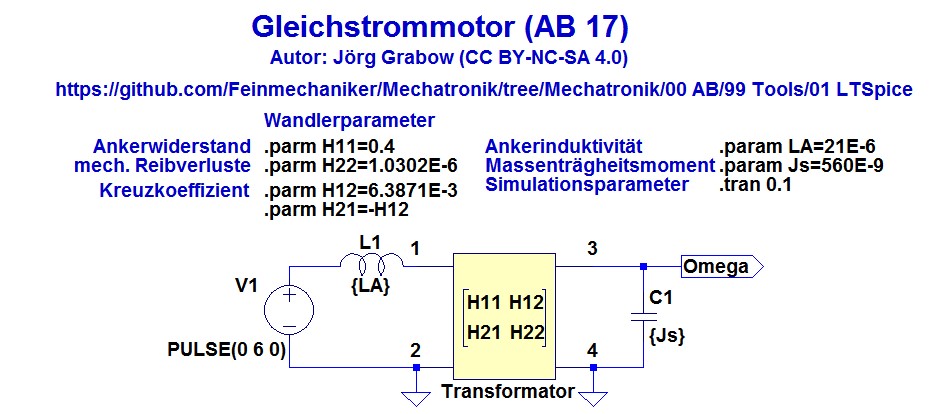
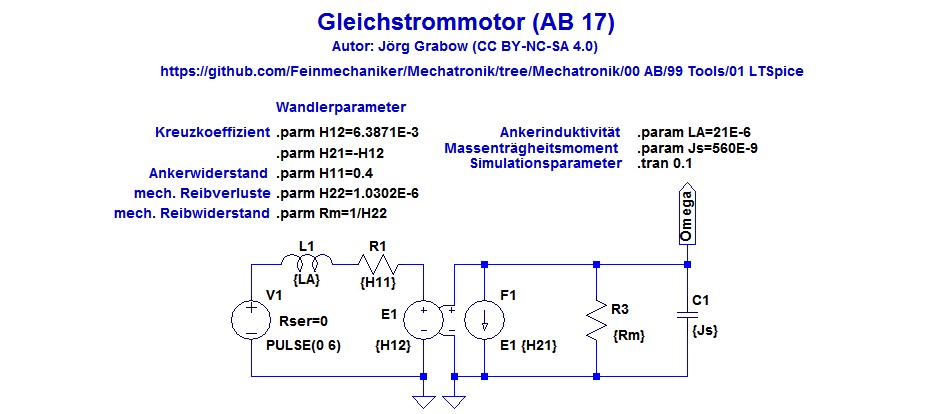
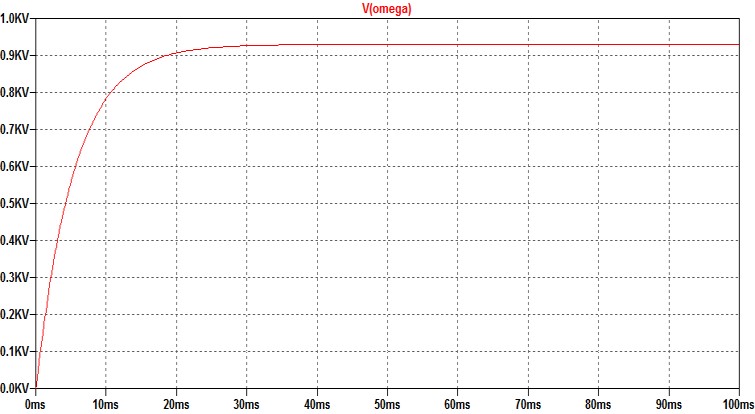
Bitte schön, anbei das Modell einer Gleichstrommaschine. Die Variante AB_17.asc benötig meine Bibliotheken, die Variante AB_17_1.asc mal ganz ohne zusätzliche Bibliotheken. Der Vorteil des reziproken Wandlers besteht ja darin, dass die Maschine in der Simulation sowohl als Motor als auch als Generator verwendet werden kann. Noch ein Nachtrag: Hier [1] habe ich ein kleines Python-Script hinterlassen, welches die Parameter H11 und H12 aus der Messung am Motor schätzen kann. [1] Beitrag "Re: Parameterschätzung, überbestimmtes LGS, Kalman-Filter"
:
Bearbeitet durch User
Angehängte Dateien:
-

LAB_16_1.jpg
49 KB -

LAB_16_2.jpg
40 KB
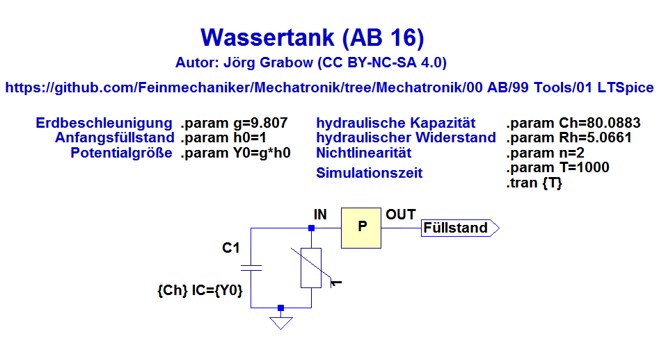
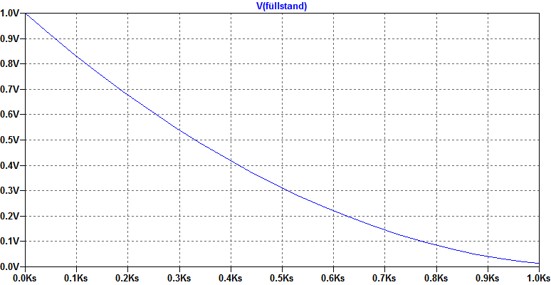
Ein Beispiel aus der Hydraulik. Untersucht wir ein Behälter (Tank) bei dem am unteren Auslauf das Wasser frei abfließen kann. Wie verhält sich hier der Füllstand h(t)? Diese Aufgabe zeigt, wie auch nichtlineares Verhalten mittels nichtlinearer konzentrierter Ersatzelemente abgebildet und gelöst werden kann.
Angehängte Dateien:
-

LAB_18_1.jpg
100 KB -

LAB_18_2.jpg
48 KB
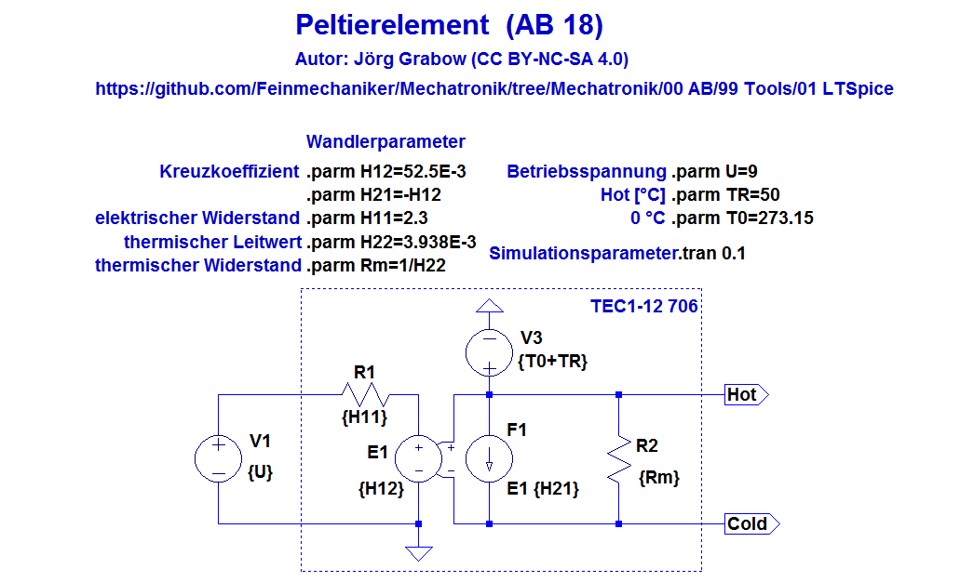
Ein Beilspiel für einen thermoelektrischen Wandler (Peltier-Element) Das Modell ist für das Peltier-Element TEC1-12706 erstellt, kann aber sehr einfach auf jedes andere Element umkonfiguriert werden. Die thermischen Kapazitäten sind hier nicht integriert. Wie zu erwarten, ist der maximale Wirkungsgrad mit 6.6% sehr schlecht. Ursache ist das Wiedeman-Franz-Gesetz welche die Proportionalität zwischen der thermischen und elektrischen Leitfähigkeit beschreibt. Die Simulation zeigt sehr anschaulich, dass im Arbeitspunkt am ohmschen Widerstand des Peltier-Elementes ca. 20.7W erzeugt werden. Davon fließen 6.3W über den thermischen Widerstand von der Heiß- zur Kaltseite.
Joe G. (feinmechaniker) Benutzerseite 21.06.2024 12:58 >Bitte schön, anbei das Modell einer Gleichstrommaschine. Die Variante >AB_17.asc benötig meine Bibliotheken, die Variante AB_17_1.asc mal ganz >ohne zusätzliche Bibliotheken. Dankeschön :-) Um den Thread nicht zu zerstückeln, habe ich hier mal einen Thread für die Modellierung eines Bastelmotors aufgemacht: Beitrag "Bastelmotor Gleichstrommotor Modell"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.