Ich habe einen MEMS-Drucksensor, der als Schwingungsermittler arbeitet und sowas ähnliches ist, wie ein Mikrofon für Körperschwingung. Der gibt ein moduliertes Signal aus Nullen und Einsen ab, das im Mittel das analoge Signal darstellt. Quelle ist sicher ein Sigmadeltademodulator, nehme Ich an. Wir filtern das analog und sampelen es, wollen es aber nun digital verarbeiten. Ich brauche somit eine kleine Schaltung, die das einstellbar in digitale Daten wandelt. Daten wären im Bereich 100...500kHz. Ich wollte eigentlich einen DSP vermeiden. Kriegt man sowas als fertigen Chip?
Noch als Info: Der Filter ist analog und mithilfe von ordentlich OP-Leistung recht störsicher gebaut und daher platzfressend. Er soll nun zusammen mit dem AD-Wandler aus Platzgründen wegfallen. Die Lösung muss also im wörtlichen Sinne "klein" sein. Am Besten ein kleiner Käfer, der das Signal direkt als serielles Datenwort an eine andere Baugruppe schickt. Datenrate wäre 1MHz fast I2C.
Moin, Als fertigen Chip wuerd's mich wundern, wenns so was gaeb'. Fuer 'nen richtigen DSP schaetz' ich's mal als zu popelig ein. Vielleicht reicht sogar irgendein PIC oder AVR oder sowas - kommt halt drauf an, wie hoch jetzt genau die Datenraten sein muessen, wie die Filterei aussehen muss, die genauen Timings der Interfaces... Gruss WK
Was für ein Signal kommt aus dem Sensor denn raus? PDM? Dann könnte dir der ADAU7002 helfen es in I2S umzuwandeln.
Bevor der TE die Frage nach der exakten Signalform nicht beantwortet, wird ihm wohl kaum jemand helfen können. Dezimator-Schaltungen gibt es viele, da kommt es auf das Frequenzverhaltnis an. Im einfachsten Fall ist es ein gleitender Mittelwert über eine festzulegende Anzahl von Samples. Bei 500kHz und Schwingungen im Tonbereich, z.B. 32.
Hallo Edi, wie schon geschrieben ist es ein Puls-Datenstrom. Gleitender Mittelwert scheint mir etwas zu einfach. Habe mich inzwischen schlau gemacht: Zur Auswahl stehen SINC und FIR-Filter mit bandbegrenzender Kennlinie.
Reinhard S. schrieb: > wie schon geschrieben ist es ein Puls-Datenstrom. Wie noch nicht geschrieben: WAS für ein Puls-Datenstrom? PDM? PWM? Hast du dir den ADAU7002 mal angeguckt?
Reinhard S. schrieb: > Habe mich inzwischen schlau gemacht: > > Zur Auswahl stehen SINC und FIR-Filter mit bandbegrenzender Kennlinie. Na also, dann nimm die doch. fertsch. SCNR, WK
@Joe: Es ist ein PDM. @WEKA: Die Frage ist auch so ein bischen, wo hinein Ich die Filter baue. Der kleinste PIC den Ich mir jetzt ausgekuckt habe, dürfte etwas mickrig sein, um die Bandbreite hinzubekommen und die Filter zu beherrbergen.
Ach so: Zur anderen Frage: Der Adu ist leider keine Option, wird dann zuviel und Ich müsste IIS noch dekodieren.
Wäre es eine Idee den Dateneingang einfach an das Enable Signal eines Timer zu legen? Und ein zweiter Timer gibt ein Interrupt wann das Signal ausgelesen werden soll. Der STM32F0 käm für dich in frage. Ich habe es zwar nicht selber probiert, aber so wie ich das Manual lese ist das der Gated Mode. Reference manual RM0091, Stichwort: Gated Mode
Reinhard S. schrieb: > Ach so: Zur anderen Frage: Der Adu ist leider keine Option, wird dann > zuviel und Ich müsste IIS noch dekodieren. Du suchst nach einem fertigen IC, und der ADAU7002 ist dann "zuviel"? Verstehe ich nicht. I2S Interfaces haben heute übrigens sehr viele Mikrocontroller in Hardware an Board, decodieren musst du also nichts. Im Zweifel kann auch ein SPI Interface zum einlesen benutzt werden. Welchen Controller benutzt du denn?
Moin, Reinhard S. schrieb: > @WEKA: Die Frage ist auch so ein bischen, wo hinein Ich die Filter baue. > Der kleinste PIC den Ich mir jetzt ausgekuckt habe, dürfte etwas mickrig > sein, um die Bandbreite hinzubekommen und die Filter zu beherrbergen. Ja vielleicht ist's etwas mickrig, vielleicht auch nicht. Vielleicht gehts aber mit dem 4. kleinsten PIC, vielleicht brauchts auch einen Cluster aus 255 Raspies um die Anbindung der Filter an die Datenbank in Java realisieren zu koennen ;-) Das ist schwierig zu beurteilen, wenn fast alle Eingangs/Ausgangsparameter wie: Vorhandene/Benoetigte Signale und ihr Timing, Bitbreiten an Ein- und Ausgang, jeweilige Abtastfrequenz an Ein- und Ausgang, Max. Ripple im Durchlassbereich, min. Sperrdaempfung, Frequenz am Ende des Durchlassbereichs, Frequenz am Anfang des Sperrbereichs streng geheim sind... Da ist's erstmal voellig wumpe, ob FIR, SINC, oder Melitta 1x4. Gruss WK
Reinhard S. schrieb: > Der kleinste PIC den Ich mir jetzt ausgekuckt habe, dürfte etwas mickrig > sein Dann nimm einfach das etwas bessere Modell. PIC32 hat I2S. http://ww1.microchip.com/downloads/en/AppNotes/01422A.pdf Kosten für den PIC 2-3 EUR, ADAU7002 1 EUR, Softwareentwicklung (Decimator) 0 EUR (nicht nötig).
:
Bearbeitet durch User
Dergute W. schrieb: > Da ist's erstmal voellig wumpe, ob FIR, SINC, oder Melitta 1x4. Also Melitta ist eigentlich generell zu empfehlen. Den haben wir im Büro regelmässig im Einsatz. Ich werfe noch einen CIC hinein: Beitrag "CIC pruning (Bitbreitenverkleinerung)"
Nebst der Thematik der Vorgabe für Passband-Stoppband-Dämpfung wäre vorab noch was anderes zu klären: Die entscheidende Frage hier ist, ob der Schallwandler mit einem eigenen Takt läuft, dieser fix ist und auch zur Verfügung steht, bzw sogar vorgegeben werden kann oder ob etwa das Signal selbstständig schwingt und damit eine variable Periode ohne bekannte zeitliche Auflösung vorliegt. In diesem Fall wird die Auswertung nämlich aufwändig! Die "500kHz" hören sich für mich nämlich etwas verdächtig an. Nicht, dass das ein selbstschwingender Oszillator ist. Nur dann, wenn der Takt von Außen kommen darf, könnte man einen klassischen Filter nehmen und direkt dezimieren. Den o.g. PDM-Chip "ADU" wiederum könnte man dann nehmen, wenn es gelänge, ihn entsprechend zu takten, um auf eine entsprechende Audiofrequenz zu kommen. Ich bin nicht sicher, ob der auf jeder Grundfrequenz läuft. Meistens haben die eine recht stabile PLL mit engem Frequenzkompensationsbereich drin. Ansonsten ist das eher was für einen kleinen FPGA. Die Dezimation an sich ist einfach, wenn wie angenommen ein direkter Bezug zwischen der eingehenden und ausgehenden Frequenz besteht. Ob ein CIC da taugt, müsste man aber genauer betrachten. Was hat denn der Wandler für einen akustische Bandbreite?
Hallo, ich hatte mit diesem Beispielcode ein Mikrofon, das PDM macht, mit ner I2S Schnittstelle von nem STM32F4 verheiratet: Beitrag "Hook up a MEMS microphone to the I2S of a Cortex M4" Dieser Bitstrom kam mit 2.5MHz. Ich brauche von dem nur eine Frequenz und mache darauf nen Goertzel. Man kann aber auch beliebige andere Filter, CIC FIR oder was auch immer drauf laufen lassen. Cheers Detlef
Das erfordert dann aber, dass seine Anordnung diese Frequenz auch fix bringt: Ein Beispiel hatten wir hier schon mal: Beitrag "Re: MEMS Ultraschallmikro mit PDM" Bezogen auf die 500kHz wären das dann 1/6 der Grenzfrequenz bzw eine geringere S/N.
Sodele, frisch aus dem Urlaub zurück geht es morgen ans weitere Umsetzen. Wegen der Fragestellung nochmal die Fakten: Der Drucksensor ist neu und hat nur ein "preliminary" Datenblatt. Er wird speziell gefertigt und ist für Analogauswertung ausgelegt. Die Angaben sind so, dass eine "Pulsmodulation" (nicht "Pulsdichtemodulation" obwohl es das wohl ist) gemacht wird, die das Analogsignal herstellt. Vom Hersteller wird gesagt, dass man das sicher auch digital auswerten kann, wenn die Flanken gemessen werden. Als Filter ist ein Tiefpass mit 3kHz Eckfrequenz eingesetzt, Steilheit an die 40dB/Dekade. Die Pulsfrequenz variiert zwischen 100kHz und 500kHz. Eigentlich könnte müsste ICh doch nur die Periode messen und auswerten?
Neue Werte von heute: Die minimale Pulslänge wäre 2,1 us und müsste sicher mit einem Faktor 10.000 gemessen werden. Geht das mit FPGAs: Beitrag "Maximale Abtastrate mit FPGAs"
Reinhard S. schrieb: > Die minimale Pulslänge wäre 2,1 us und müsste sicher mit einem Faktor > 10.000 gemessen werden. Warum das denn? 2,1us sind einfach 480 KHz. Dazu braucht man keinen FPGA. Kannst du mal das Datenblatt des Sensors verlinken bitte?
Die Frage ist, wie genau diese Mikrosekunden gemessen werden müssen. Mit Faktor 10000 wird sportlich.
Mit einem Gigaherz-Frequenzmessgerät in Hardware bekomme Ich An/Aus-Zeiten für das Signal zwischen 500 und maximal 5.000 zwischen zwei Flanken und ungefähr das Doppelte für die Periode. Beitrag "Re: Maximale Abtastrate mit FPGAs"
Reinhard S. schrieb: > 500 und maximal 5.000 Einheit? PDM heisst Puls- Dichte. D.h. ein einzelner Puls ist immer gleich breit. Wenn mehrere Pulse direkt aneinander "kleben" sieht es aus wie ein breiterer Puls. Man muss also die Clock-Frequenz (die ja auch als Signal vorhanden ist) kennen, und mit dieser Frequenz die Pulse sampeln. Oversampling ist nicht nötig. Bitte kläre uns doch endlich mal auf, um welchen Sensor (Hersteller/Typ) es geht. Aus dem Datenblatt kann man diese Informationen sofort herauslesen.
:
Bearbeitet durch User
Der Sensor ist nicht im Netz, de keine Katalogware und das Datenblatt sehr simpel und auch nicht versendbar. Ich habe momentan nur einen Prototypen. Es kann sein, dass es keine PDM ist, das war nun meine Vermutung. Die Pulslängen und -abstände stehen in keinem Zusammenhang und haben auch keinen Takt. Der Modulator ist frei laufend und gibt das analoge Signal digital aus. Die Pulsbreiten können quasi jeden Wert annehmen. Gedacht ist es, wie schon gesagt, digital über eine große Distanz zu übertragen, es gfs zu refreshen und dort einen analogen Filter dranzuhängen. Wir wollen jetzt klein und kompakt im Gerät machen, deshalb muss es klein sein. Als Beispiel finde Ich z.B. die Pulslängen 3222 ns 3113 ns 2973 ns ... jeweils gemessen mit einem Frequenz-Perioden-Zähler auf 1ns genau. Mehr geht hier nicht. Mit 100MHz Abtastung käme wahrscheinlich raus 3220 ns 3110 ns 3070 ns also gröber und zu ungenau. Faktor 100 macht zu viele Fehler.
Reinhard S. schrieb: > Mit 100MHz Abtastung käme wahrscheinlich raus > 3220 ns > 3110 ns > 3070 ns Im Mittel kommt da schon das Richtige raus. Miss doch einfach die Puls/Pausenverhältnisse über einen Timer. Dann ist auch egal, ob es PDM oder PWM ist.
Tu dir und uns bitte den Gefallen, deine Problemstellung ordentlich zu beschreiben. Zeig uns bitte Bilder von dem Signal mit Zeitangaben. Die Verändungerung der analogen Größe beeinflusst das digitale Signal Wie? Bei minimalem analogen Signal sieht das digitale Signal Wie aus? Und wie bei maximalem Signal? Zwei steigende Flanken sind immer Wieviel us auseinander? Die fallende Flanke kommt im einen Zeitfenster von 0.5 (?) bis 1.5 (?) us danach? Diese Signalform wiederholt sich ( ) nicht / ( ) mindestens N mal? Die Steilheit der Flanken liegt bei ca. x GV/s? Wie wird das digitale Signal weiterverarbeitet (Art der Filter, ...)? Wie hoch muss die digitale Samplerate sein (Wie viele Pulse pro Sekunde müssen erfasst werden)? Wenn du den Abstand zwischen zwei Flanken sehr genau messen möchtest, nutzt du ein Time of Flight Messgerät. Deren Auflösung liegt im Bereich 50 ps (=20 GHz). Damit wirst du aber keine nah aufeinander folgenden Pulse abtasten können. Und das ist auch nur dann genau, wenn eine ganze Reihe Rahmenbedingungen bei deinem Signal und Takt eingehalten werden. z.B. http://www.ti.com/lit/ds/symlink/tdc7200.pdf PS: Das Crossposting ist wenig hilfreich. Es wäre günstig, den Post im FPGA-Forum wieder zu schließen. Dort wird gerade zum zweiten Mal gerätselt, was das Signal ist.
Moin, Ja mei, man muss da halt auch mal sagen koennen: Nein, es geht nicht. Dass man jetzt nicht unbedingt von irgendwelchen Spezialteilen die Datenblaetter hier reinstellen mag, ist glaub' ich doch sehr leicht zu verstehen. Wuerd' ich auch nicht tun. Waere wohl auch gegen ein wahrscheinlich vorhandenes NDA. Reinhard S. schrieb: > Die Pulslängen und -abstände stehen in keinem Zusammenhang und haben > auch keinen Takt. Der Modulator ist frei laufend und gibt das analoge > Signal digital aus. Die Pulsbreiten können quasi jeden Wert annehmen. > Gedacht ist es, wie schon gesagt, digital über eine große Distanz zu > übertragen, es gfs zu refreshen und dort einen analogen Filter > dranzuhängen. Wir wollen jetzt klein und kompakt im Gerät machen, > deshalb muss es klein sein. Wenn die Pulslaengen und -abstaende voellig frei von 0Hz bis >2MHz sein koennen, kann man's nicht ueber eine grosse Distanz (ich geh' mal von einigen Lichtjahren aus) uebertragen und es kann auch nicht klein und kompakt (also wahrscheinlich Kantenlaengen im Nanometerbereich) sein. Gehteinfachnicht. Tutmirleid. Fertsch. SCNR, WK
ElKo schrieb: > PS: Das Crossposting ist wenig hilfreich. Es wäre günstig, den Post im > FPGA-Forum wieder zu schließen. Dort wird gerade zum zweiten Mal > gerätselt, was das Signal ist. Das sollte sich rausfinden lassen :-) Wie es prozessiert werden müsste, hatte Ich weiter oben schon geschrieben: Entweder mit fester Taktfrequenz: Beitrag "Re: Decimator-Schaltung für Puls-Datenstrom" Oder mit variabler Frequenz: Beitrag "Re: Decimator-Schaltung für Puls-Datenstrom" Reinhard S. schrieb: > Die Pulslängen und -abstände stehen in keinem Zusammenhang und haben > auch keinen Takt. Der Modulator ist frei laufend und gibt das analoge > Signal digital aus. Aha! Wäre Version 2. Allerdings lese Ich gerade: > jeweils gemessen mit einem Frequenz-Perioden-Zähler auf 1ns genau. Ist das Flanke zu Flanke und stetig annehmend / zunehmend: ----- ------- -------- --------- ---- ------ ------- ------- -------- oder so, bei Zunahme lange an, kurz aus und ansonsten umgekehrt: ---- ------- ------- -------- ---- --- -- --- ---- ---- --- ---- ----- ---- -- -- Das erste wäre eine Frequenzmodulation, das zweite eine Frequenz-Phasenmodulation wie bei PDM. Bei der PM müsstest Integrieren, bei der FM je nach Schaltungsprinzip gfs sogar Differenzieren. Ich hatte mal einen Durchflusssensor, der funktionierte wie ein VCO, allerdings war f = k * U*U. Auf welchen Flanken wurde gemessen?
Wieder ist mir einer zuvorgekommen, beim Schreiben :-) Dergute W. schrieb: > Wenn die Pulslaengen und -abstaende voellig frei von 0Hz bis >2MHz sein > koennen Eigentlich führt es nur zu einem Rauschen und wenn das Signal analog gewandelt ja genau genug ist, wird sich das auch digital auch machen lassen. Man darf halt nicht nur von Flanke zu Flanke messen, sondern muss mehrere nehmen und den integrierenden Zähler dividieren. Bei der Messung eines sehr schnellen Signals ist das eigentlich immer so.
Jürgen S. schrieb: > FM fällt wohl aus, wenn man es durch einen analogen Filter (vermutlich RC) integrieren kann (-> Eingangspost). Aber auch ich empfinde den Spannungsbogen langsam für überspannt und ins Langweilige abdriftend. Dergute W. schrieb: > Waere wohl auch gegen ein > wahrscheinlich vorhandenes NDA. Oder spricht einfach für einen sauschlechten Sensor. Wenn man einen einfachen Beschleunigungssensor mit GHz abtasten muss stimmt doch irgendwie was nicht (mit dem Sensor oder den Anforderungen).
:
Bearbeitet durch User
Die dezimation ist am Ende komplett unabhängig von der Art der Datengewinnung. Das lässt sich auch total verrauscht noch gut filtern.
Joe F. schrieb: > Jürgen S. schrieb: >> FM > > fällt wohl aus, wenn man es durch einen analogen Filter (vermutlich RC) > integrieren kann (-> Eingangspost). Das ist auch mein Verständnisproblem :-) > Wenn man einen einfachen Beschleunigungssensor mit GHz abtasten muss Ich glaube eher, dass es ein sehr preiswertes System ist, das eben nur analog kann, sonst hätte es wahrscheinlich einen digitalen Ausgang. Gleichwohl kann man den sicher realisieren, nur eben nicht so simpel mit dem direkten Ausmessen der Perioden.
Angehängte Dateien:
-

pulsmusterneu.gif
13 KB
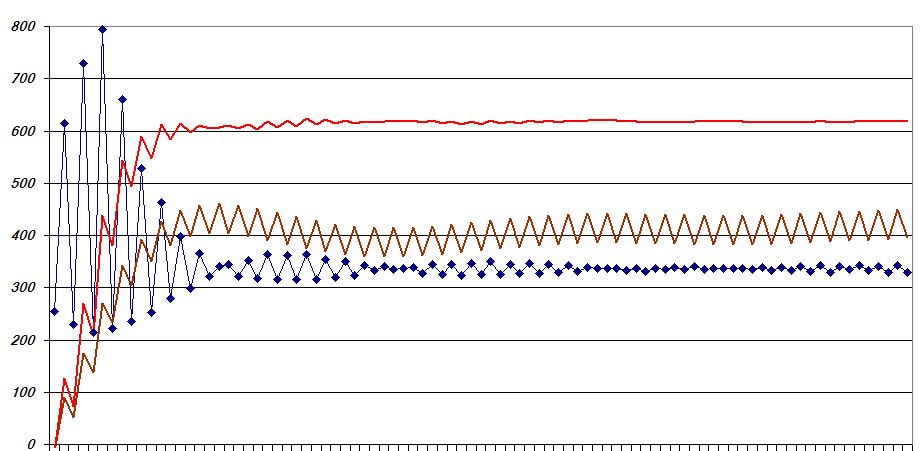
Ich hänge immer noch an der Auswertung des Sensors: Der einfache Mittelwert bringt bereits ein logisch sinnvolles Signal, das aber nicht dem Verlauf der Erschütterung entspricht und scheinbar noch invertiert werden muss, da es sich ja um gemessene Perioden handelt. Die Werte wechseln auch wie bei einer PWM, es ist aber keine normale PWM, weil das Integral nicht stimmt. Ich habe zur Demonstration das Signal wie bei einer PDM integriert (violett) und alternativ audaddiert, wenn es wie bei einer PWM >50% sind, also den Mittelwert etwa abgezogen (rot). Mein Problem ist neben der Gewinnung genauer Werte auch das Verständnis, wie Ich vom gepulsten Datenstrom in einen Wertebereich gelange. Die "normale" Dezimation, wie Ich sie kenne, geht von einer Menge von 0 und 1 aus, deren Zahl ganzzahlig ist, also in einen Filter geworfen werden könnte.
Angehängte Dateien:
-

signal.png
64 KB -

signal2.png
17 KB -

signal2.png
31 KB



Ach lass. Sieht die Sensorbewegung so aus wie die rote Kurve? Dein Denkfehler ist, dass du einfach irgendwas aus den gemessenen Zeiten rausfiltern willst, ohne das eigentliche Signal zu rekonstruieren. Es ist wohl eine PWM mit veränderlicher Periodendauer. Ich habe deine blauen Punkte erstmal sortiert, und angenommen, dass die am Anfang unten liegenden Punkte die Dauer der Low-Phase und die oben liegenden Punkte die Dauer High-Phasen sind. Daraus ergibt sich dann eine PWM, die man wunderbar integrieren kann -> rotes Signal.
:
Bearbeitet durch User
Angehängte Dateien:
-

signal3.png
29 KB

...wobei Integrieren ja Quatsch ist - da käme die zurückgelegte Strecke des Sensors raus. Man muss einfach nur das Verhältnis nehmen t_on/(t_on+t_off). Zu beachten ist halt, dass die "Samples" zeitlich unterschiedliche Abstände haben. Daher kann man das jetzt nicht einfach in einen digitalen Filter (z.B. Low-Pass) reinwerfen. Das muss dann erstmal entsprechend (zeitlich) interpoliert werden.
:
Bearbeitet durch User
Angehängte Dateien:

Die Auswertung ist so sicher noch nicht der Weissheit letzter Schluss, es sei denn, der Sensor speichert die Position in der er sich befindet. Das glaube Ich aber nicht, also macht der Offset wohl kaum einen Sinn. Wie Ich schon vermutet habe, muss das sicher noch differenziert werden. Nur so ist zu erklären, dass das Signal durch eine Mittelung stimmt. Es würde vielleicht auch helfen, jene wundersame Analogschaltung kennenzulernen, die das Signal schon verarbeitet. Wenn es eine Mittelwertbildung über einen Tiefpass ist, müsste der Mittelwert wie bei der mathematischen Bildung weglaufen. Dann würde Deine zweite Kurve stimmen, allerdings ohne, dass Du den Mittelwert abziehst. Da das aber nicht das analoge Signal sein kann, ist der Sensor garantiert mit einem Bandpass ausgewertet, nimmt also den Gleichanteil raus. Ergo brauchst Du einen Bandpass, also einen Differenziator und dann einen Integrator. Die Idee, den Mittelwert abzuziehen, ist theoretisch richtig, praktisch aber nicht besonders handlich, weil Du den messen müsstest. Daher würde Ich erst integrieren und dann differenzieren. Das beseitigt das Rauschen und gfs auch schon Dein Problem mit der begrenzten Samplegenauigkeit. Hab das mal mit dem Bild von Joe optisch gemacht und siehe da: Blubb, eine Schwingung, wie sie bei dem Verrücken eines Gegenstandes entsteht. Für die Berechnung selbst darf natürlich keine 0 und 1 in den Dezimator geschoben werden sondern z.B. +1 / und -1 sonst rennt das Ding in die Wiese. Für einen IIR-Filter, der den TP+HP schon integriert hat nimmt man z.B. -32767 und +32767 als Eingangswerte. Dann kommt aber meines Erachtens noch ein Schritt: Eine Inverse Faltung des schwingenden Ausgangssignals mit der Ü-Funktion des Sensors, weil dieses ja eine Impulsantwort darstellt und man die Charakteristik des Sensors, also dessen mechanische Trägheit rausrechnen werden will. Heraus käme der reale Impulsverlauf (im Rahmen der Messgenauigkeit und Bereichsgrenzen). Gibt dann sowas wie einen verschmierten Diracstoss oder beim Verrücken ein Rechteck. Joe F. schrieb: > Daher kann man das jetzt nicht einfach in einen > digitalen Filter (z.B. Low-Pass) reinwerfen. Eigentlich schon, analog geht es ja auch. Man muss den Filter nur nachbauen. Das Signal kommt mit hoher Wahrscheinlichkeit aus einem Delta-Sigma-Modulator, der frei läuft, also eine Kippschaltung, deren Ausgang um das analoge Signal pendelt und automatisch 50:50 annimmt, wenn das Signal steht. Damit muss es integriert werden, um den Verlauf zu rekonstruieren. Das Problem: Diese Schaltungen sind nicht 100% symmetrisch und generieren einen Offset, den bei der Rekonstruktion mitberücksichtigen muss. Da man ihn aber nicht kennt, muss man ihn entweder dynamisch messen, statisch kalibriert wegrechnen, oder eben einfach durch einen Hochpass verwerfen.
:
Bearbeitet durch User
Also bevor ich ein Signal zuerst integriere, um es dann mit einem Hochpass wieder abzuleiten, nehme ich lieber direkt das Signal ;-) Tiefpass mit passender Grenzfrequenz dahinter kann natürlich nicht schaden, ausser es muss ungewöhnlich schnell sein.
:
Bearbeitet durch User
Angehängte Dateien:
-

dezimations-bespiel.gif
20 KB
{kind=link}
{kind=link}
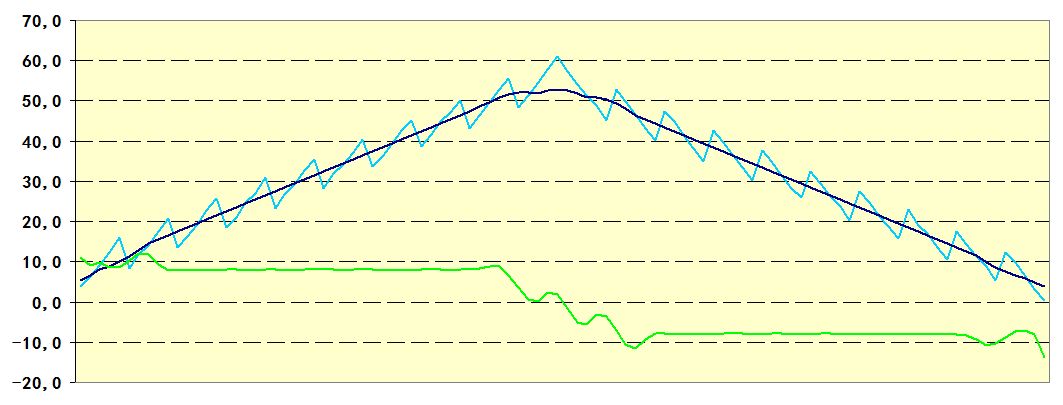
Joe F. schrieb: > Also bevor ich ein Signal zuerst integriere, um es dann mit einem > Hochpass wieder abzuleiten, nehme ich lieber direkt das Signal Jain, es kommt darauf an, über welche Bereiche / Frequenzen man integriert / differenziert - da kommt dann schon was anderes raus. Die Information kommt als moduliertes Signal an, das zudem aufgrund des Sampelns noch mit zusätzlichem Phasenrauschen beaufschlagt wird. Das will man ja weg haben. Die Integration muss dazu unter Berücksichtigung der Abtastfrequenz eine gewisse Zahl von Samples umfassen. um mindestens diese HF-Anteile beseitigen zu können, während die Differenziation wiederum maximal den Offset eliminiert. Das geht auch mehrstufig und ist eigentlich das, was ein CIC üblicherweise tut. Mit einer Kombination CIC und FIR geht es etwas zielführender: Als Beispiel mal ein Dreieckssignal mit überlagertem Dreieck auf höherer Frequenz. Das ist so etwa das, wie es nach dem ersten Integral aussieht. Das Ergebnis ist faktisch zweimal integriert und differenziert, das erste mal ist es Integral selbst (blau) das zweite mal über 2 Perioden -> Mittelwert und dann nochmal differenziert (grün). Man schnippelt sich damit quasi das gewünschte Band heraus und kann den Knick im Dreieck sehr deutlich erkennen. Mit einem einzelnen Tiefpass, auch mehrstufig oder einem simplen SINC geht das nicht so präzise. Wenn man es richtig macht, kommt man besonders auch über die analoge Version drüber.
:
Bearbeitet durch User
Reinhard S. schrieb: > Datenrate wäre 1MHz fast I2C. Mit 1Mbps über I2C kriegt man regelmäßig nur 50%-80% Effizienz hin und auch nur, wenn es P2P ist. Sind maximal 50kHz Abtastrate für das gesampelte Signal. Reicht das überhaupt?
Ihr solltet euch von Reinhart was bezahlen lassen, so wie Ihr euch in die Lösung seiner Hausaufgabe reinkniet. Die einzig zweckmäßige Vorgangsweise wäre, dass er einfach seine analoge Schaltung skizziert und diese übersetzt.
Danke für die Mühen in die Runde. Wir habe einen FIR-Filter integiert und bkommen das gewünschte Signal, wenn auch mit noch sehr viel Rauschen. Edi. M. schrieb: > Reinhard S. schrieb: >> Datenrate wäre 1MHz fast I2C. > > Mit 1Mbps über I2C kriegt man regelmäßig nur 50%-80% Effizienz hin und > auch nur, wenn es P2P ist. Sind maximal 50kHz Abtastrate für das > gesampelte Signal. Reicht das überhaupt? Das würde schon reichen.
H. S. schrieb: > Das würde schon reichen. Ich hätte jetzt vorgeschlagen, das Signal überabzutasten und es über mehrere Kanäle zu übertragen, aber der Herr Hochtechnologieprogrammierer hat offenbar seine Lösung hier abgestaubt und ist über alle Berge.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.